基于機電混合式目標模擬的雷達制導半實物仿真關鍵技術*
2015-12-10 05:00:00崔瀟瀟程思敏
彈箭與制導學報 2015年4期
關鍵詞:信號
張 翔,崔瀟瀟,王 洋,韓 路,程思敏
(中國兵器工業第203研究所,西安 710065)
0 引言
雷達制導導彈的工作原理是利用雷達導引頭發射的雷達波照射目標并接收目標反射的回波信號,導引頭對所接收的信號進行處理,同時輸出目標視線角速率數據,送導彈制導控制系統,由制導控制系統控制舵機改變導彈的飛行方向和姿態,向目標發起攻擊[1-2]。
雷達制導導彈技術含量高,實現難度大,為了能在實驗室內考核制導控制部件和武器系統的性能指標,半實物仿真是必不可少的驗證手段。雷達制導仿真系統的主要功能是在實驗室內產生與被試導引頭作戰方式相適應的目標和環境信號,進行模擬導彈飛行全過程的制導控制系統閉環半實物仿真試驗。實現雷達目標模擬有陣列式和機電混合式兩種方式[3],文中主要對基于機電混合式目標模擬的雷達制導半實物仿真關鍵技術進行研究,首先對比分析了陣列式與機電混合式雷達目標模擬技術的優缺點,對機電混合式雷達制導仿真系統進行了總體方案設計;然后給出了機電混合式雷達目標模擬、目標建模、射頻信號屏蔽裝置等關鍵技術的解決途徑;最后提出了機電混合式雷達制導仿真系統的工作原理和試驗流程。本研究可用于雷達制導仿真系統的構建以及開展仿真試驗的參考依據,具有很好的應用前景。
1 雷達目標模擬方式對比
陣列式目標模擬是由射頻發射單元按照一定的規律排列在一個球面上[4-5],球面的球心位于轉臺的回轉中心,采用三元組合成信號的模式,模擬到達被試導引頭天線口面的目標信號。工作過程為射頻信號源產生的信號經過陣列饋電系統從相應的三元組輻射單元合成不同角位置的信號,再經由暗室向被試導引頭輻射。
機電混合式目標模擬采用的是小型陣列,通常只有一個三元組,從而可以大大減少射頻發射單元的數目。該三元組安裝在二維平動系統上,通過二維平動系統帶動三元組在垂直和水平兩個方向進行線運動實現不同角位置目標回波信號的模擬。
下面對兩種方式的優缺點進行對比:
1)仿真能力
由于陣列式目標模擬是由饋電系統來實現目標位置的控制,其位置模擬變化速率和目標模擬精度較機電混合式要強,因此從理論上講采用陣列式目標模擬的精度更高,仿真能力更強。但在實際中,由于幾乎所有雷達導引頭的測角精度遠遠低于機電混合式目標模擬所提供的測角精度,在這種情況下兩種目標模擬方式的仿真效果基本相當,仿真置信度都能滿足仿真要求。
2)系統復雜度
實現陣列式目標模擬非常復雜,需要幾百個射頻發射單元,數十個射頻開關、程控衰減器、程控移相器和饋電線纜等器件,這些設備都要安裝在一個大型鋼架結構上,該結構具有六自由度調整功能。機電混合式目標模擬實現起來較為簡單,一般只需一個三元組和一個二維平動系統即可實現雷達目標模擬。
3)調試及維護難度
由于組成復雜,陣列式系統的調試及維護難度極高,每隔一段時間都要對陣列上的每個射頻發射單元進行校準,每次試驗前系統的調試工作非常繁瑣,一般需要好幾天的準備時間。機電混合式系統由于只使用一個三元組,調試和校準工作很快就可以完成,而二維平動系統的維護難度與轉臺類似,可靠性較高,操作簡單。
4)建設費用
根據國內外已建成的雷達制導仿真系統的經驗,陣列式系統的建設費用一般是機電混合式系統建設費用的4~5倍。
綜上所述,盡管機電混合式仿真系統在仿真能力方面略有不足,但在系統復雜度、調試及維護難度、仿真系統建設費用等方面具有明顯的優勢,因此,采用機電混合式仿真系統是一種非常經濟、實惠、高效的雷達制導仿真方案。
2 總體方案設計
機電混合式雷達制導仿真系統由射頻暗室、射頻接收單元、射頻信號源、射頻發射單元三元組、射頻信號屏蔽裝置、三軸飛行轉臺、二維平動系統、舵機負載模擬器、慣導仿真轉臺、仿真計算機、實時網絡系統和試驗總控制臺系統組成,其原理框圖如圖1所示。
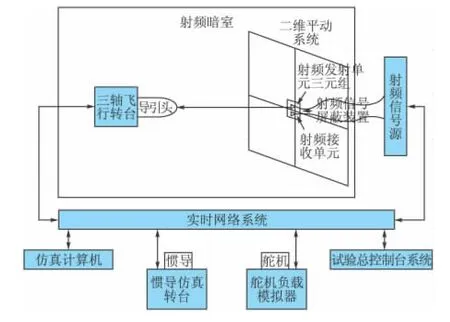
圖1 機電混合式雷達制導仿真系統原理框圖
如圖1所示,仿真系統分為暗室內部分及暗室外部分。暗室內部分由射頻發射單元三元組、射頻接收單元、射頻信號屏蔽裝置、三軸飛行轉臺及二維平動系統組成;暗室外部分由射頻信號源、舵機負載模擬器、慣導仿真轉臺、仿真計算機、實時網絡系統及試驗總控制臺系統組成。仿真時,射頻接收單元接收導引頭發射的射頻信號傳輸給射頻信號源,射頻信號源實時生成目標回波信號,供被試導引頭探測、捕獲和跟蹤。各組成部分實現功能如下:
射頻暗室:用于在實驗室內提供一個電磁波的自由傳播空間。
射頻接收單元:用于接收導引頭發出的射頻信號,并轉發給射頻信號源進行處理。
射頻信號源:用于生成目標回波信號及環境雜波信號并輸出至射頻發射單元三元組。
射頻發射單元三元組:用于接收來自射頻信號源產生的射頻目標信號和干擾信號,處理后向被試導引頭輻射,實現目標和干擾的空間角度模擬。
射頻信號屏蔽裝置:用于屏蔽和吸收被試導引頭發出的射頻信號,防止其照射到二維平動系統上發生反射,引入額外的干擾信號。
三軸飛行轉臺:用于模擬導彈在飛行過程中的姿態變化。
二維平動系統:用于負載射頻接收單元、射頻信號源和射頻發射單元三元組,帶動其在垂直和水平兩個方向進行線運動,實現不同角位置目標回波信號的模擬。
舵機負載模擬器:用于模擬導彈飛行過程中舵機舵面所受空氣氣動力鉸鏈力矩。
慣導仿真轉臺:用于模擬導彈在飛行過程中的姿態變化。
仿真計算機:用于仿真試驗中導彈飛行彈道以及各種模型的解算和運行。
實時網絡系統:用于仿真過程中信息的交互及實時傳輸。
試驗總控制臺系統:用于實現仿真系統各組成的監測、控制、數據采集記錄等功能。
3 機電混合式雷達制導仿真關鍵技術
3.1 機電混合式雷達目標模擬
機電混合式雷達目標模擬由射頻接收單元、射頻信號源、射頻發射單元三元組、二維平動系統共同實現。射頻發射單元三元組由3個射頻發射天線和變頻器組成,射頻接收單元由一個射頻接收天線和變頻器組成,二者的布局形式如圖2所示。
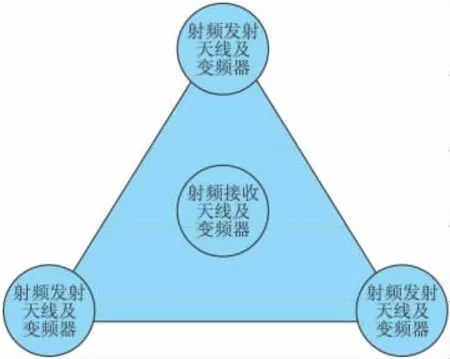
圖2 射頻發射單元三元組和射頻接收單元布局形式
射頻發射單元間距的設定決定著射頻仿真的精度。單元間距太大,不利于保證目標位置精度,甚至會產生目標位置的多值性;單元間距太小,則陣列單元數驟增,增加投資,而且調試維護工作量增大。為了避免目標位置出現多值,單元間距必須滿足以下公式的要求,即:

式中:L為單元間距(rad);D為最大天線口面直徑(mm);λ為最小波長(mm);K為系數,一般取經驗值K=0.8。目前絕大多數雷達制導仿真系統的射頻發射單元間距取值在18~24 mrad之間。
3.2 目標建模
射頻目標模型分為非擴展目標和擴展目標兩類[6]。當前國內外在進行雷達制導仿真試驗時一般使用非擴展目標,擴展目標建模通常采用統計模型,下面是幾種常用的目標模型:
模型I:慢起伏A
所謂慢起伏,是指目標回波在任意一次掃描期間都恒定(即完全相關),但從一次掃描到下一次掃描是獨立的(不相關)。此時目標截面積的概率密度函數服從指數函數分布:


模型II:快起伏A
此時目標截面積和回波振幅的概率分布與模型I相同,但為快起伏。所謂快起伏,是指目標回波在脈沖與脈沖之間的起伏是統計獨立的。
模型III:慢起伏B
目標截面積σ的概率密度分布函數為:


模型IV:快起伏B
目標截面積σ或回波振幅A滿足的概率密度函數與起伏模型III相同。
上述4類模型中,第I、II類模型適用于由大量截面積近似相等的獨立散射體組成的復雜目標,理論上要求散射體的數量為無限大,實際上只需要四、五個即可。第III、IV類模型適用于一個大的反射體和許多小反射體組成的目標。無論是哪一類情況,代入雷達方程的截面積應是截面積的統計平均值。為了達到規定的檢測概率,而虛警概率不超過某允許值所需要的信噪比,可根據不同的統計模型分別求得。如果只用一個參數來描述復雜目標的截面積起伏特性,那么可以用目標回波幅度的均值和統計模型I和II。
3.3 射頻信號屏蔽裝置
主動雷達導引頭的工作過程為導引頭不斷發射雷達波照射目標并接收目標反射的回波信號。由于不同角位置目標回波信號的模擬是通過二維平動系統實現的,而二維平動系統的框架和十字運動軸會反射導引頭發出的主動射頻信號,該信號的一部分會向導引頭方向反射,與三元組發出的真實射頻目標信號一起投射到被試導引頭的入瞳,從而嚴重干擾射頻目標信號的品質并影響導引頭的判斷。該引入的射頻干擾信號的強弱和特性并不固定,而是隨著入射角度、導引頭發射的主動射頻信號的特性以及彈目相對運動幾何關系而不斷變化。干擾信號的強度和誤差無法定量的測量和分析,更無法補償,給試驗結果和仿真置信度帶來很大的不確定性,嚴重時會導致仿真試驗失敗。
二維平動系統的框架是固定不動的,為了防止照射在其上的射頻信號發生反射,需在其表面貼覆吸波材料,將干擾信號吸收掉。而對于二維平動系統的十字運動軸,由于其在試驗過程中是不斷移動的,因而無法采用貼吸波材料的方法,必須設計射頻信號屏蔽裝置。屏蔽裝置實際上是一塊貼有吸波材料的平板,通過仿真夾具固定安裝于二維平動系統的負載盤中心,隨負載盤一起運動,因此無論在任何情況下雷達導引頭發出的射頻信號都會照射到射頻信號屏蔽裝置上并被其吸收,避免射頻信號在十字運動軸表面發生反射。射頻信號屏蔽裝置安裝位置示意圖如圖3所示。
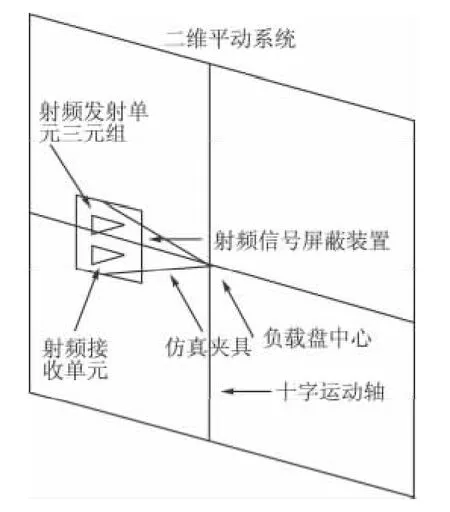
圖3 射頻信號屏蔽裝置安裝位置示意圖
射頻信號屏蔽裝置外形為正方形,邊長L由被試導引頭的波束寬度α及導引頭至二維平動系統負載中心的距離R確定。屏蔽裝置尺寸及與導引頭的相對幾何關系如圖4所示。
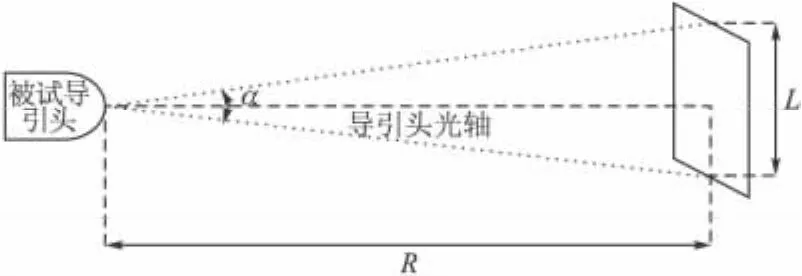
圖4 射頻信號屏蔽裝置尺寸及與導引頭的相對幾何關系
由圖4可以看出,射頻信號屏蔽裝置邊長L計算如下:

4 工作原理及試驗流程
如圖1所示,雷達導引頭安裝在三軸轉臺上;射頻接收單元、射頻發射單元三元組安裝在二維平動系統上,實時接收導引頭發出的射頻信號并生成目標回波;射頻信號屏蔽裝置安裝在二維平動系統上;舵機安裝在舵機負載模擬器上,模擬舵機所受到的鉸鏈力矩。
仿真開始后,仿真計算機運行導彈動力學、運動學模型,實時計算出導彈運動信號、姿態角和姿態角速率信號等。三軸轉臺和慣導仿真轉臺按照仿真計算姿態角和姿態角速率信號等驅動指令運動;慣導安裝在慣導仿真轉臺上,實時測出導彈運動信號、姿態角和姿態角速率信號,通過接口送給彈上計算機作為控制系統模型的輸入信號。射頻接收單元、射頻發射單元三元組用夾具安裝在二維平動系統上。二維平動系統由仿真計算機控制,實現垂直、水平方向運動,射頻接收單元和射頻發射單元三元組放置在十字運動軸的交點為導引頭提供實時的目標信號,導引頭對該信號進行捕獲和跟蹤,輸出視線角速率信號送彈上計算機。彈上計算機綜合所有輸入信號,運行控制系統模型,形成控制指令,通過接口送給舵機;舵機跟隨控制指令運動,形成舵偏角,通過接口送給仿真計算機;仿真計算機根據舵偏角計算控制力和控制力矩實現雷達制導導彈全系統閉環仿真。
5 結論
文中對基于機電混合式目標模擬的雷達制導半實物仿真進行了研究,給出了機電混合式雷達制導仿真系統的總體設計方案。對機電混合式雷達目標模擬、目標建模、射頻信號屏蔽裝置等關鍵技術進行了深入研究,提出了機電混合式雷達制導仿真系統的工作原理和試驗流程。本研究可用于雷達制導仿真系統的構建以及開展仿真試驗的參考依據,具有很好的應用前景。
[1]方輝煜.防空導彈武器系統仿真[M].北京:宇航出版社,1995.
[2]劉興堂.精確制導、控制與仿真技術[M].北京:國防工業出版社,2006.
[3]單家元,孟秀云,丁艷,等.半實物仿真[M].2版.北京:國防工業出版社,2013.
[4]王海濤,朱根才,賁德.射頻仿真系統的誤差分析與可信度評估研究[J].系統仿真學報,2007,19(7):1548-1551.
[5]李瑛,胡楚鋒,李南京,等.陣列射頻仿真系統精度改進方法研究[J].系統仿真學報,2009,21(22):7045-7047.
[6]王國玉,汪連棟.雷達電子戰系統數學仿真與評估[M].北京:國防工業出版社,2004.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
