激光制導炸彈的姿態控制引入時機研究*
2015-12-10 04:59:36趙艷輝張擁軍
彈箭與制導學報 2015年2期
王 穎,趙艷輝,張擁軍
(中國空空導彈研究院,河南洛陽 471000)
0 引言
外掛導彈投放時和載機的分離安全問題一直備受關注,所謂安全分離是指導彈在飛離載機的過程中載機、發射裝置和其他武器不產生損壞、碰撞或有害的影響。
錯開載機距離的能力是衡量外掛導彈能否安全分離的重要指標此錯開距離是彈道初段外掛物任一部分同載機之間的最小距離,通常垂直距離比水平距離要大,一般垂直距離大于7~10個彈體直徑可認為彈體離開了對載機的危險區。在危險區內對導彈進行有效控制就尤為重要,如果起控時間早,導彈機動時可能會碰到載機,如果起控時間晚,會影響導彈的發射性能,因此控制時機的選擇就變得更為重要。
文中所介紹的是小型激光制導炸彈從載機的安全分離問題,該型導彈是掛裝在無人機等輕型飛機上的,主要靠重力脫離載機,并且在小攻角下是靜不穩定的。為了實現導彈的安全分離,需要在分離瞬間控制4個舵面保持零位。在滿足一定安全距離后,適時讓穩定回路引入姿態控制,促使舵面偏轉實現對彈體姿態變化的抑制,確保離開載機過程中彈體的姿態穩定,防止姿態變化過快而使控制系統發散。
1 數學模型
1.1 彈體物理參數
彈體主要物理參數包括特征長度、特征面積、3個軸向的轉動慣量、質量和質心位置等。
1.2 氣動系數建模
1.2.1 氣動模型
將彈體氣動模型建立在執行坐標系上,氣動系數計算完成后,通過坐標變換轉換為彈體坐標系中的氣動系數。彈體系和測量系指向一致,執行系單獨定義,如圖1所示。
執行坐標系指向和舵翼面伸展方向一致,和彈體系相差45°度。慣性測量信息轉換到執行系送給穩定回路進行反饋控制。導航所用的慣性測量信息不需要轉換。
舵面分解方式為:

圖1 彈體系、測量系和執行系定義
式中 δr、δp、δy分別為三通道舵控,δ1、δ2、δ3、δ4分別為分解到舵面上的控制指令。
1.2.2 坐標系轉換
慣性測量量要轉換到彈體執行系下,送給控制回路進行反饋控制;彈體模型計算攻角和氣流扭角時要增加一次轉換,將彈體系中的速度分量轉換到執行系;氣動力系數和氣動力矩系數要從彈體執行系轉換到彈體系,之后通過動力學運算得到慣性測量量,送慣測模型。
測量系和彈體系重合,彈體執行系和彈體系的轉換矩陣如式(3)和式(4)所示,下標m為測量系,下標e為執行系。

1.3 彈體動力學模型
1.3.1 彈體坐標系氣動力和氣動力矩模型
彈體氣動力和氣動力矩模型如下所示[1]:

1.3.2 彈體坐標系質心平動動力學方程
彈體質心平動動力學方程如下所示[1]:
1.3.3 彈體坐標系繞質心轉動的動力學方程
彈體繞質心轉動的動力學方程如下所示[1]:

2 起控時間參數對載機安全影響
來自載機周圍的氣流擾動對導彈姿態有影響,進而又對載機安全造成影響。為實現機彈的安全分離,主要采取在導彈無控段合適的時間點介入穩定回路,控制彈體姿態穩定,在不滿足起控條件時進行零指令控制,這樣既能保證載機安全又能保證導彈性能。
穩定回路姿態控制引入時機的選取對發射安全和導彈性能都會有影響。如果引入時機較早,彈體機動時可能與飛機碰撞,危及載機安全;如果引入時機較晚,則會影響導彈性能,還可能會使導彈沒有足夠的時間修正初始積累誤差或者需要很大的控制力才能將導彈的姿態穩定下來。對于沒有發動機的激光制導炸彈而言,當積累的角度和角速度誤差較大情況下,穩定回路開始工作時需要糾正的系統誤差較大,容易造成控制量飽和,所以評估和分析接通穩定回路的時間點尤為重要,在合適的時機抑制彈體姿態大幅變化,不但有利于和載機的分離安全,還能節省為糾正系統較大姿態誤差的使用能量。
3 數字仿真分析
針對激光制導炸彈在機彈分離后穩定回路姿態控制不同引入時機進行數字仿真分析,通過算例數據的對比分析得出該激光制導炸彈姿態控制引入的最佳時機。
算例選取目標點為坐標原點,機彈分離時彈道和目標的水平距離為3 000 m、相對高度為3 000 m、初始速度為180 m/s、偏航方向為-90°。
圖2給出了導彈在典型條件下物理分離后0~1s、間隔0.1s時不同時機引入姿態控制的舵控曲線,其中 δ0~ δ3分別為 4 個舵面上的舵控,δr、δp、δy分別為三通道舵控。
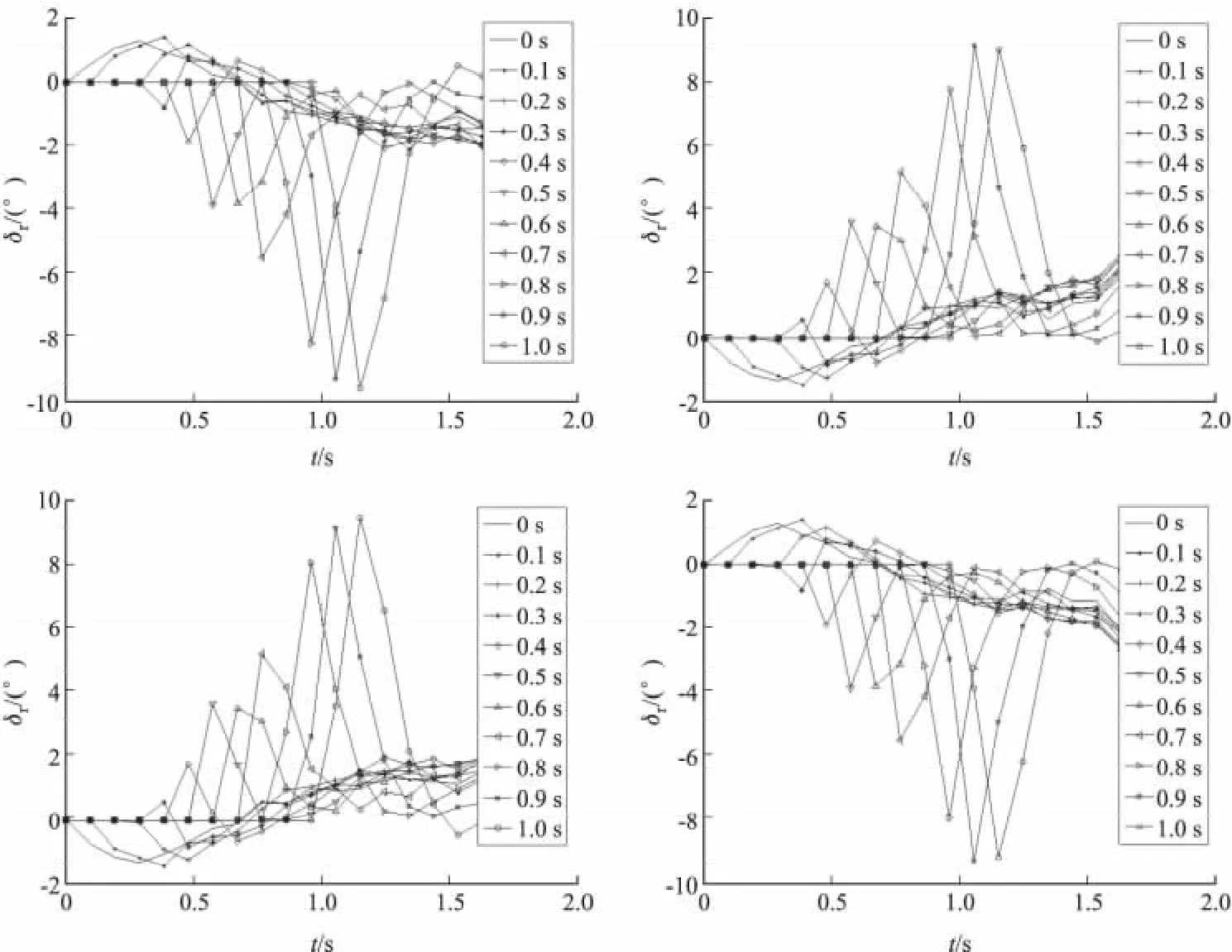
圖2 1s內姿態控制引入的舵控曲線
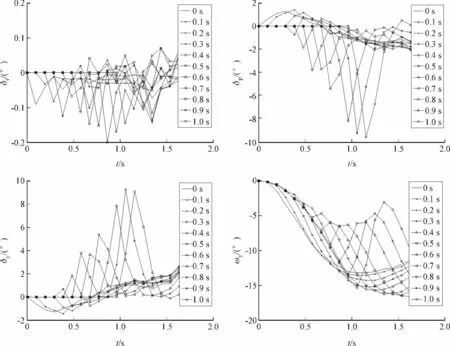
圖3 1s內姿態控制引入的三通道舵控曲線
通過圖2、圖3可以得出,在離機0.3 s時舵面控制幅度最小,即此時引入對彈體的姿態控制能夠在最小的舵偏下達到彈體姿態的穩定。下面列出無控條件和離機0.3 s引入姿態控制的彈體姿態曲線和位置變化曲線。
由圖4可看出,在低空低速飛行狀態下,加入控制0.3 s內導彈位置的變化與無控狀態相差不大,彈體在y方向位移變化相對較大,在重力作用下離機0.3 s時y向位移約0.45 m,遠大于根據此時彈體姿態計算得到的導彈離機最小距離,處于安全分離狀態。
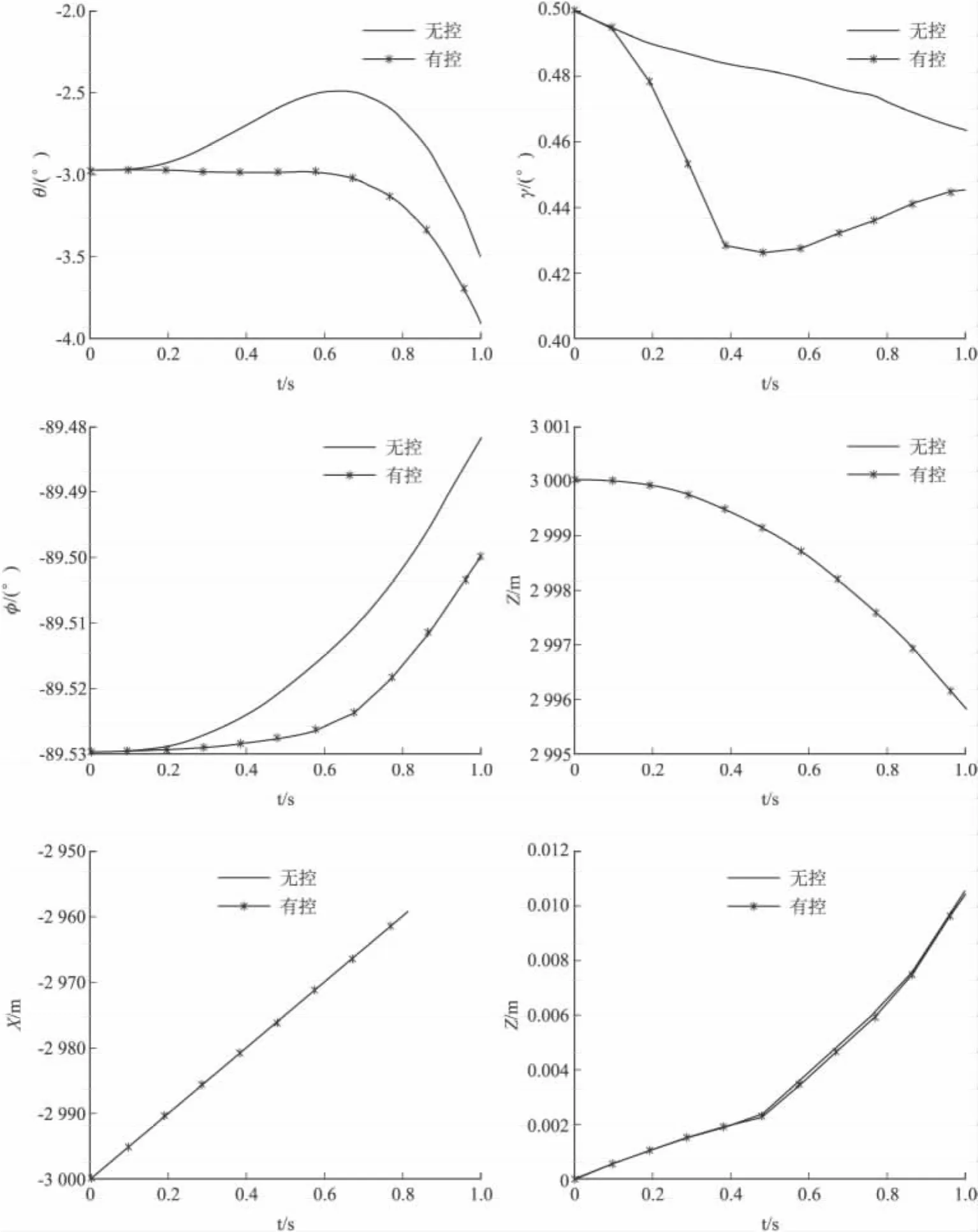
圖4 1s內姿態和位置變化曲線
而對于彈體姿態相對于無控的變化比較明顯,姿態控制的引入明顯減小了姿態誤差的變大趨勢,特別是俯仰角的增大趨勢受到抑制,滾轉角向零靠近趨勢增大,使彈體姿態得到有效控制,彈體穩定可控,不會威脅載機安全。
4 結論
文中針對小型激光制導炸彈從載機的安全分離問題,提出了在適當時機引入穩定回路姿態控制,驅動舵面偏轉實現對彈體姿態變化的抑制,確保了導彈離開載機過程中的姿態穩定,證明了起控時間參數計算的合理性。
通過算例仿真和無控條件下機彈分離后彈體姿態變化的對比分析,驗證了在仿真計算得到的起控時機引入姿態控制,有利于彈體姿態穩定,還可以避免出現控制量飽和,有效防止了控制系統發散。同時,也拉大了與制導回路開始作用時的時間間隔,有助于使彈體在開始響應制導指令時處于較平穩的狀態。
因此,文中所介紹的在適當時機采取姿態控制有利于導彈的姿態穩定,保證了導彈投放時的載機安全。
[1]錢杏芳,林瑞雄,趙亞男.導彈飛行力學[M].北京:北京理工大學出版社,2000.
[2]孟秀云.導彈制導與控制系統理論[M].北京:北京理工大學出版社,2002.
[3]Gillybaeuf J P,Mansuy P,Pavsic S.Two new chimera methods-Application to missile separation,AAIA95-0353[R].1995.
[4]Van Albada G D,Van Leer B,Roberts W W.Acomparative study of computional methods in cosmic gas dynamics[J].ASTRON.ASTRO PHYS REV,1982,108(1):76-84.
[5]于長官.現代控制理論[M].哈爾濱:哈爾濱工業大學出版社,1997.
[6]聶璐,向錦武.飛機外掛物投放安全性的參數影響分析[J].飛行力學,2011,29(2):25-28.
