雙機協同無源目標跟蹤軌跡優化
2015-12-19 00:56:28冉華明周銳吳江董卓寧
北京航空航天大學學報 2015年1期
冉華明,周銳,吳江,董卓寧
(北京航空航天大學 飛行器控制一體化技術重點實驗室,北京100191)
在現代空戰中,隨著電子干擾技術的發展,機載雷達所處的電磁環境變得越來越復雜,使得機載雷達的探測能力大大地降低,同時使得戰斗機受到的威脅度大大地提高.機載紅外探測跟蹤系統屬于無源探測跟蹤系統,由于不向外輻射電磁波,使其具備不易受干擾和隱蔽探測等優點,但其只能探測目標對的角度信息,不能直接探測目標的距離信息.
雙機協同無源目標跟蹤利用兩架飛機各自的位置信息和探測出的目標角度信息,再根據目標定位模型和濾波算法,計算出目標的狀態.如何衡量和提高雙機無源探測跟蹤的精度是國內外學者研究的無源探測跟蹤的一個重要方向.目前國內外對雙站協同無源探測的精度分析主要集中在如何靜態地配置基站來提高定位精度這方面,文獻[1-4]給出了雙機測向交叉定位造成的模糊區的計算方法,對測向定位精度進行分析,研究了間距、目標位置、測角精度以及平臺測量誤差對定位精度的影響,得出了幾何精度因子(GDOP)等高線,但它們都只考慮飛機靜止時的情況,未考慮飛機如何根據最優配置來規劃軌跡的問題.
未來空戰中,飛機所處的環境復雜多變,事先規劃的航路不能很好地滿足作戰要求,如何根據戰場環境的變化實時地規劃飛機的軌跡就顯得尤為重要.文獻[5]提出了一種基于遺傳算法的在不確定環境下的無人機軌跡設計方法.文獻[6]研究了動態環境下基于市場策略的分布特點的多飛機的軌跡設計.文獻[7]對雙機執行協同探測任務,提出一種閉環控制方法,能夠達到探測精度的要求.文獻[8-9]提出了一種基于滾動時域控制方法的無人機軌跡設計方法.文獻[10-12]研究了對靜止目標的跟蹤軌跡設計,分析得到軌跡最終收斂于安全半徑上,且雙機視線夾角成90°.文獻[13]研究了雙機協同對對面目標攻擊的軌跡設計,使兩架飛機先分開成90°靠近目標,提出了一種反饋的軌跡設計方法.文獻[14]研究了雙機幾何配置對協同定位的影響,得出了雙機的最優幾何配置,并分別采用滾動時域優化(RHO)和基于導引勢場法的目標跟蹤閉環反饋混合控制策略來控制飛機的軌跡.但文獻[10-13]中只是針對靜止目標和速度相對飛機速度較小的目標來進行協同軌跡優化,未對目標速度較大的情況進行討論和分析.
本文分析了雙機協同無源跟蹤的精度,并基于此對雙機協同軌跡進行了優化.
1 雙機協同無源探測位置精度因子分析
雙機協同無源探測跟蹤系統飛機與目標的幾何態勢如圖1所示.
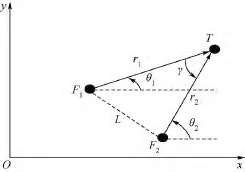
圖1 飛機與目標的幾何態勢Fig.1 Geometric situation of aircrafts to target
兩架飛機相對目標的視線的夾角為

飛機的觀測方位角滿足以下方程:
則可得出目標的位置:
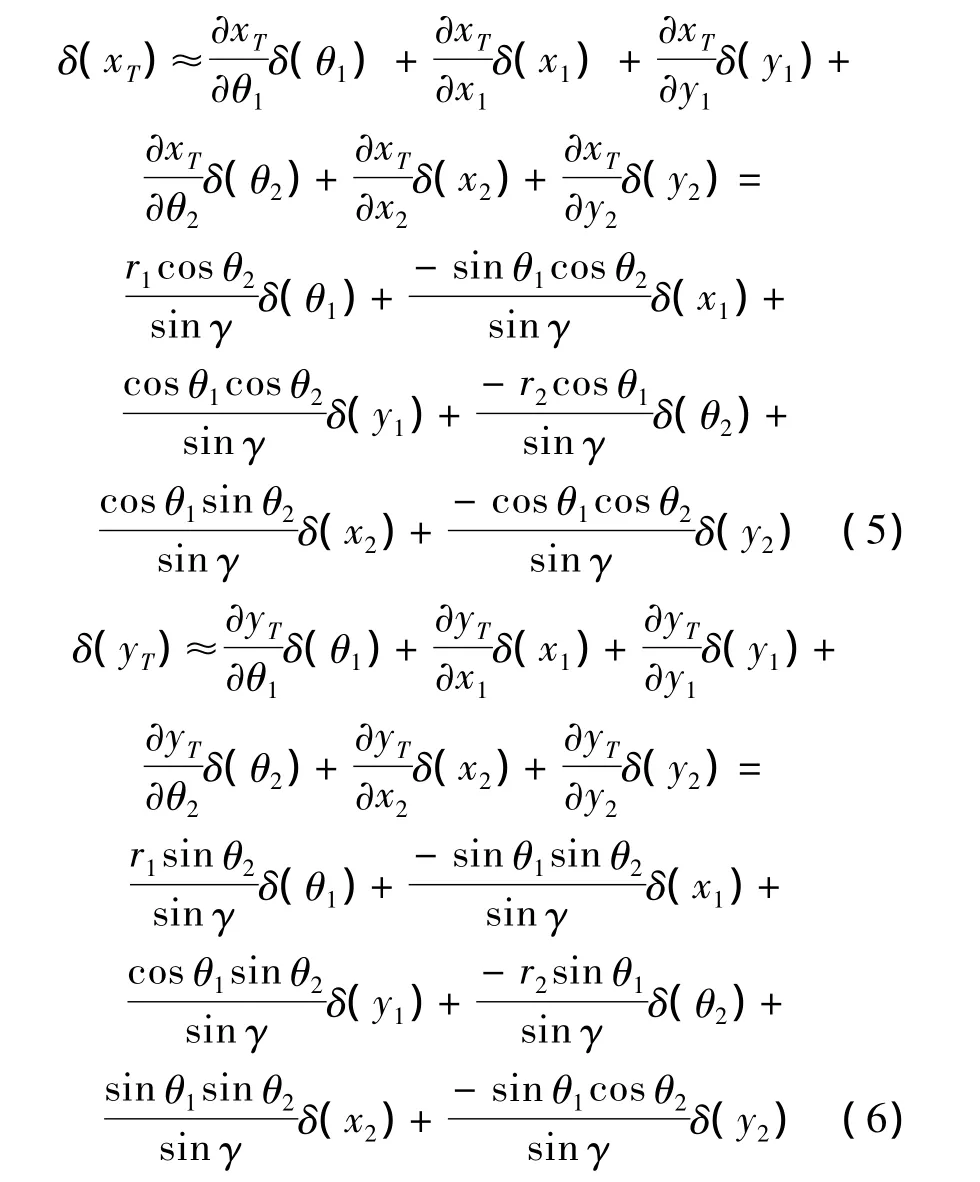
根據泰勒公式,可將 xT,yT在真實值(θ1,θ2,x1,x2,y1,y2)處進行展開,并只保留一階項,得到目標x方向和y方向估計誤差:
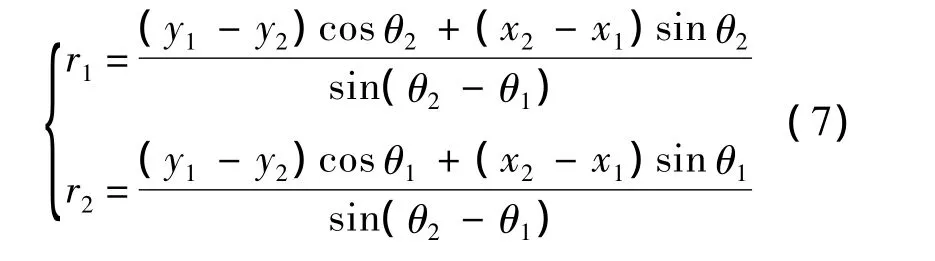
根據飛機與目標的幾何關系,可得飛機距目標的距離為
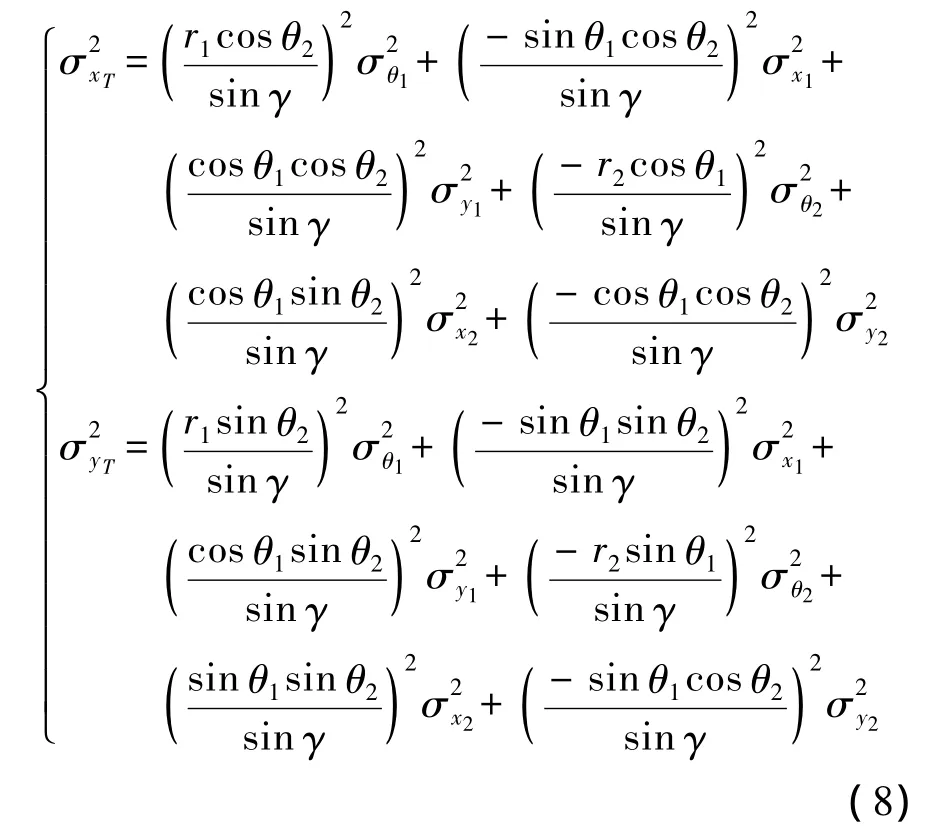
因為測量誤差都為零均值高斯噪聲,根據式(7),分別對式(5)和式(6)求方差:
對于雙機協同探測跟蹤系統,位置精度因子(PDOP)是一種常見的衡量探測精度的指標[1-4,15],在本文中,PDOP 可表示為


如果兩架飛機的某種幾何態勢能使PDOP最小,則相應的目標估計精度也就達到最優[14].由式(10),在飛機紅外搜索跟蹤系統的角測量方差和飛機自身定位位置測量方差一定的情況下,PDOP的大小與飛機距目標的距離以及兩架飛機相對目標的視線的夾角有關,雙機協同無源探測的最優的飛機配置為
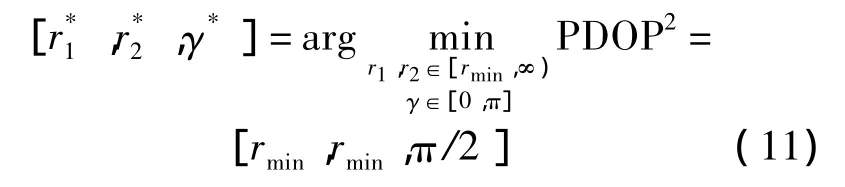
式中,rmin為飛機能夠靠近目標的安全距離.式(11)說明為了提高探測精度,兩架飛機應該盡可能地靠近目標,并保持π/2的視線夾角.
2 雙機協同無源跟蹤軌跡優化
雙機協同無源目標跟蹤系統的控制結構如圖2所示.融合中心根據兩架飛機傳輸的目標角度測量信息和自身定位信息,根據目標的運動模型以及系統的觀測方程,采用一定的濾波方法,估算出目標的狀態;指揮中心根據估算出的目標狀態以及飛機的狀態計算某種軌跡規劃的性能指標,再根據優化算法對指標進行優化求解,解算出兩架飛機各自的協同無源跟蹤控制輸入量,飛機再根據各自的控制輸入來控制飛機的運動.
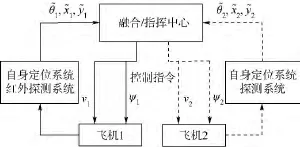
圖2 雙機協同無源目標跟蹤系統的控制結構Fig.2 Control structure of two aircrafts’collaborative passive target tracking system
2.1 雙機協同無源跟蹤建模

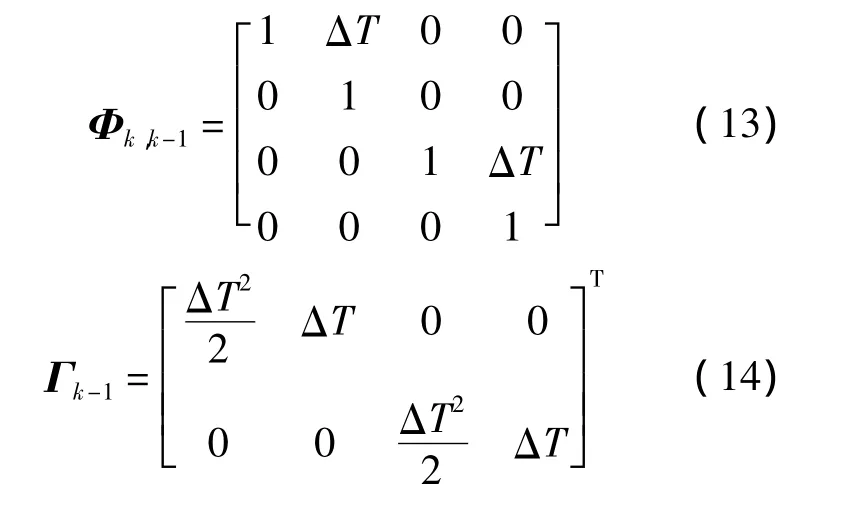
式中,Xk為 k 時刻的狀態向量;Φk,k-1為 k -1 時刻到k時刻的狀態轉移矩陣;Xk-1為k-1時刻的狀態向量;Γk-1為k-1時刻噪聲輸入矩陣.假設目標做勻速直線運動,在加速度方向上有過程噪聲,采樣時間間隔為ΔT,則
wk=[w1k,w2k]T為零均值不相關的高斯白噪聲,其方差陣為

k時刻第i架飛機對目標的方位角的真實值為
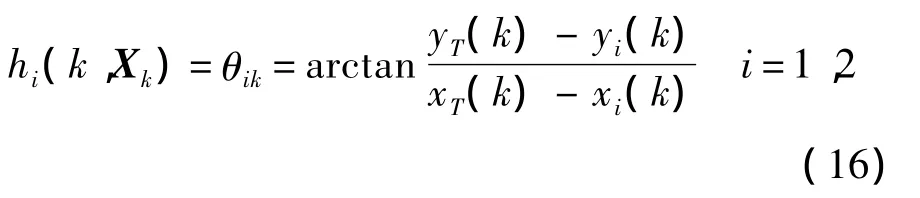
則可得到系統的觀測方程為

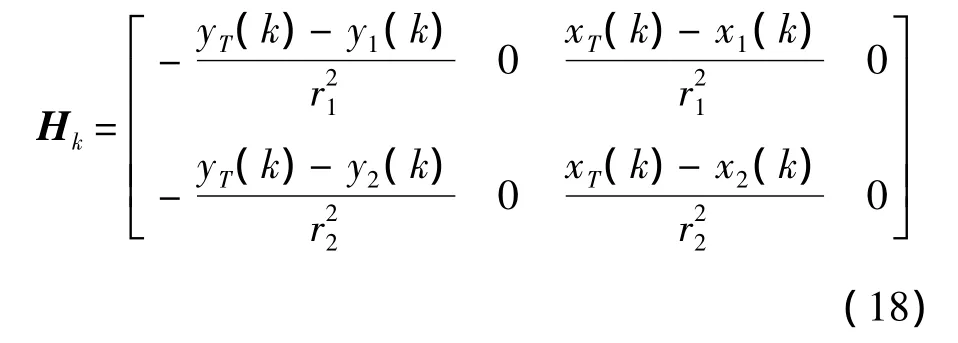
式中,Zk=[,]T為 k 時刻的雙機協同觀測向量值;h(k,Xk)=[h1(k,Xk),h2(k,Xk)]T為 k時刻的雙機協同觀測函數,這是一個非線性函數,對其進行線性化處理,得其Jacobian矩陣:
vk=[v1k,v2k]T為零均值不相關的高斯白噪聲,其方差陣為

2.2 基于擴展信息濾波的目標狀態估計
擴展信息濾波(EIF)是結合了擴展卡爾曼濾波(EKF)和信息濾波(IF)的優點的基礎上發展起來的針對非線性系統的濾波方法[16],卡爾曼濾波中使用狀態估計x^及方差P進行濾波計算,而信息濾波利用信息狀態y^及費歇信息Y進行濾波計算,其中,y^=P-1x^,Y=P-1.擴展信息濾波的預測和估計過程如下:
1)預測過程.
2)估計過程.
式中,zik為k時刻第i架飛機的觀測向量;n為信息濾波節點個數,本文中,n=2.
則k時刻目標狀態的最終估計結果為

2.3 控制指標的選取
雙機協同無源跟蹤的主要任務就是提高目標的估計精度,本文用信息熵作為雙機協同軌跡控制的優化指標[14]:

信息熵越大,則飛機的精度就越高,飛機的最優控制就是找到飛機最優速度和航向角輸入,使得控制指標最大,即

式中,ψ =[ψ1,ψ2]T為飛機的航向角;v=[v1,v2]T為飛機的速度.
同時,在對飛機進行控制時,還應該考慮飛機的性能約束:
式中,vi為飛機速度;vmin為飛機的最小速度;vmax為飛機的最大速度;為飛機的角速度;ωmax為飛機的最大角速度為飛機的加速度;amax為飛機的最大加速度.
雙機協同無源跟蹤時還應該考慮飛機自身的安全,即飛機與目標的距離應不小于安全距離,本文取安全距離為目標的導彈的最大發射距離,則安全約束可表示為

式中RM_max為目標的導彈的最大發射距離.
2.4 基于RHO的雙機協同軌跡優化
雙機協同無源探測軌跡優化問題是一個多約束的單目標優化問題,本文采用了滾動時域優化來進行最優求解[8,14].RHO 來源于滾動時域控制(RHC),在每一個采樣時刻,優化指標只考慮從該時刻起的未來某一段時間,根據系統運動模型來預測系統未來一段時間內的狀態,并利用該狀態來計算優化指標,從而建立一個優化問題,求解該優化問題,最終得到最優控制序列.當到了下一個采樣時刻時,重復上一過程,隨著時間的增加,整個過程如此反復滾動進行.雙機協同無源目標跟蹤所處的環境是動態不確定的,全程的軌跡優化設計是不切實際的,軌跡需要不斷地更新優化設計,而滾動時域優化的優點表明其可以很好地滿足這些要求.
滾動時域優化方法步驟如下.
1)由k時刻目標的狀態XT[k],對未來tr步內的目標狀態進行預測,估計得到目標的狀態序列:

由k時刻飛機的狀態X[k],估計飛機的tr步控制序列:

計算k+tr時間段內的最優控制序列:
2)取此最優控制序列的前τr段輸入u*[k:k+τr](1≤τr≤tr)作為該 τr時間段內的控制輸入.
3)k+τr時刻,重復步驟1)和2).
本文中,tr=8,τr=2.
3 仿真結果與分析
仿真假設:己方飛機的最小速度 vmin=100 m/s,最大速度 vmax=300 m/s,最大加速度amax=15 m/s2,最大航向角速度 ωmax=0.1 rad/s,飛機的角測量均方差σθ=5 mrad,飛機的自身定位均方差σr=5m;目標飛機的導彈最大發射距離為25km.仿真時間為1500s,采樣時間為1s,過程噪聲方差和測量方差分別為

1)情形1.飛機1和飛機2的初始位置分別為(-20,-80)km,(-70,-50)km,初始速度分別為(-120,160)m/s,(-160,-120)m/s;目標的初始位置和速度為(-60,-40)km,(150,150)m/s,且目標做勻速直線運動.EIF濾波器初值為X0=(-60010,151,-40010,151)T,濾波信息陣初值為 Y0=diag([500,100,500,100])-1.
飛機和目標的軌跡如圖3所示.在圖中,每隔250 s標注出3架飛機的位置,并將此時的目標與己方飛機用虛線連接起來,可以看出,飛機1一直靠近目標,由于飛機2與目標的初始距離小于最小距離,所以飛機2開始時的軌跡是遠離目標的,之后將靠近目標,兩架飛機與目標的視線之間的夾角也在π/2左右,直到達到最優幾何配置.飛機與目標的視線夾角如圖4所示,兩架飛機與目標的視線之間的夾角最終在π/2附近波動,且波動很小.雙機協同無源跟蹤目標的PDOP變化曲線如圖5所示,可以看出目標的PDOP減少并收斂于最小的PDOP.這說明基于RHO的雙機軌跡優化設計能夠使得飛機按雙機協同無源跟蹤的最優幾何配置飛行.目標的位置估計均方根誤差(RMSE)曲線如圖6所示,目標的均方根誤差減少并收斂到一個較小水平.這說明基于RHO的雙機軌跡優化設計能夠減少估計誤差,提高目標的估計精度.此情形下,該軌跡優化算法總耗時為139 s,比仿真時間1500 s的1/10還小,這說明該算法具有一定的實時性.

圖3 情形1的飛機及目標軌跡Fig.3 Aircraft and target trajectory of case 1
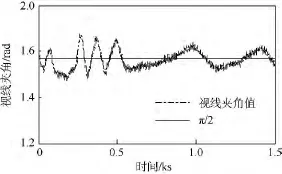
圖4 情形1飛機與目標的視線夾角Fig.4 The line of sight angle of aircraft and target of case 1
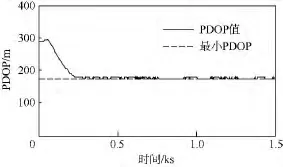
圖5 情形1的位置精度因子曲線Fig.5 Position dilution of precision curve of case 1
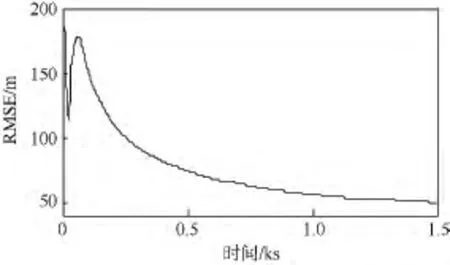
圖6 情形1的均方根誤差曲線Fig.6 Root-mean-square error curve of case 1
2)情形2.飛機1和飛機2的初始位置分別為(-30,-70)km,(-70,-30)km,初始速度分別為(-150,120)m/s,(-130,-140)m/s;目標的初始位置和速度為(-60,-40)km,(140,120)m/s,且開始目標做勻速直線運動,在800~1000 s時做角速度為0.005 rad/s的勻速左轉彎機動,之后再做勻速直線運動.EIF濾波器初值為X0=(-60010,141,- 40 010,121)T,濾波信息陣初值為 Y0=diag(500,100,500,100)-1.
飛機和目標的軌跡如圖7所示,在圖中,每隔250 s標注出3架飛機的位置,并將此時目標與己方飛機用虛線連接起來,可以看出,飛機1一直靠近目標,飛機2開始遠離目標,之后將靠近目標,兩架飛機與目標的視線之間的夾角也在π/2左右,直到達到最優幾何配置,在目標進行機動轉彎之后,兩架飛機也將相應地進行機動轉彎.飛機與目標的視線夾角如圖8所示,兩架飛機與目標的視線之間的夾角最終在π/2附近波動,且波動很小.雙機協同無源跟蹤目標的PDOP變化曲線如圖9所示,可以看出目標的PDOP減少并收斂于最小的PDOP.這說明基于RHO的雙機軌跡優化設計能夠使得飛機按雙機協同無源跟蹤的最優幾何配置飛行.目標的位置估計均方根誤差(RMSE)曲線如圖10所示,目標的均方根誤差減少到一個較小水平.這說明基于RHO的雙機軌跡優化設計能夠減少估計誤差,提高目標的估計精度.此情形下,該軌跡優化算法總耗時為147 s,約為仿真時間1500 s的1/10,這說明該算法具有一定的實時性.
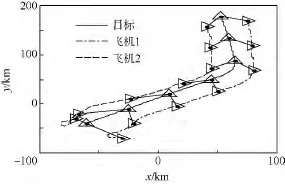
圖7 情形2的飛機及目標軌跡Fig.7 Aircraft and target trajectory of case 2
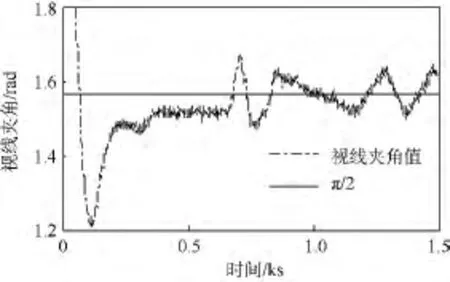
圖8 情形2飛機與目標的視線夾角Fig.8 The line of sight angle of aircraft and target of case 2

圖9 情形2的位置精度因子曲線Fig.9 Position dilution of precision curve of case 2
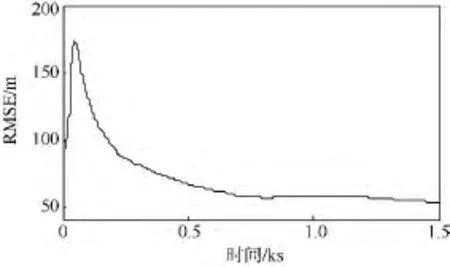
圖10 情形2的均方根誤差曲線Fig.10 Root-mean-square error curve of case 2
4 結論
本文在綜合分析雙機協同無源探測PDOP的基礎上提出了一種基于RHO的雙機協同無源探測軌跡跟蹤算法,經實驗驗證表明:
1)雙機協同無源定位中使得PDOP最小的雙機的幾何配置為雙機與目標視線夾角為90°,雙機與目標的距離為安全距離;
2)基于滾動時域優化的軌跡優化算法能保證雙機在執行無源探測任務過程中保持最優幾何配置.
未來空戰中,多機協同無源跟蹤具有很強的實用價值,將雙機跟蹤的最優空間幾何配置及誤差模型推廣到多機情況具有很重要的意義,是作者以后研究的一個重要方向.
References)
[1] 朱劍輝,方洋旺,張平,等.雙機協同定位誤差分析的研究[J].電光與控制,2012,19(6):21-25.Zhu J H,Fang Y W,Zhang P,et al.Error analysis in dual-aircraft cooperative locating[J].Electronics Optics & Control,2012,19(6):21-25(in Chinese).
[2] 王伯生,王芳.空基平臺無源定位的誤差推導與精度分析[J].航空計算技術,2012,42(3):89-91.Wang B S,Wang F.Error calculation and accuracy analysis of two-fighter passive location[J].Aeronautical Computing Technique,2012,42(3):89-91(in Chinese).
[3] 武宜川,潘冠華,羅雙喜.空基平臺無源定位精度分析[J].指揮控制與仿真,2010,32(2):89-92.Wu Y C,Pan G H,Luo S X.Analysis of passive location accuracy by air-based platform[J].Command Control& Simulation,2010,32(2):89-92(in Chinese).
[4] 張笑.無源二維交叉定位分析[J].電子科技,2013,26(2):54-56.Zhang X.Analysis of 2-D triangulation method[J].Electronic Sci& Tech,2013,26(2):54-56(in Chinese).
[5] Ousingsawat J,Campbell M E.On-line estimation and path planning for multiple vehicles in an uncertain environment[J].International Journal of Robust and Nonlinear Control,2004,14(8):741-766.
[6] Pongpunwattana A,Rysdyk R.Real-time planning for multiple autonomous vehicles in dynamic uncertain environments[J].Journal of Aerospace Computing,Information,and Communication,2004,1(12):580-604.
[7] Casbeer D W,Zhan P C,Swindlehurst A L.A non-search optimal control solution for a team of muavs in a reconnaissance mission[C]//Acoustics,Speech and Signal Processing,2006.Piscataway,NJ:IEEE,2006,4:1169-1172.
[8] Frew E W.Receding horizon control using random search for UAV navigation with passive,non-cooperative sensing[C]//2005 AIAA Guidance,Navigation,and Control Conference and Exhibit.Reston,VA:AIAA,2005,5864:1-13.
[9] 張勝祥,裴海龍,劉保羅,等.基于滾動時域優化的無人飛行器軌跡規劃[J].計算機工程與應用,2008,44(35):237-239.Zhang S X,Pei H L,Liu B L,et al.Trajectory planning for unmanned vehicles based on receding horizon optimazafion[J].Computer Engineering and Applications,2008,44(35):237-239(in Chinese).
[10] Frew E W,Lawrence D A.Cooperative stand-off tracking of moving targets by a team of autonomous aircraft[C]//2005 AIAA Guidance,Navigation,and Control Conference and Exhibit.Reston,VA:AIAA,2005,7:4885-4895.
[11] Frew E W,Lawrence D A,Morris S.Coordinated standoff tracking of moving targets using Lyapunov guidance vector fields[J].Journal of Guidance,Control,and Dynamics,2008,31(2):290-306.
[12] Summers T H,Akella M R,Mears M J.Coordinated standoff tracking of moving targets:control laws and information architectures[J].Journal of Guidance,Control,and Dynamics,2009,32(1):56-69.
[13] Sinclair A J,Prazenica R J,Jeffcoat D E.Optimal and feedback path planning for cooperative attack[J].Journal of Guidance,Control,and Dynamics,2008,31(6):1708-1715.
[14] 孫海波.多無人機協同目標跟蹤與打擊方法研究[D].北京:北京航空航天大學,2010.Sun H B.Research of multiple UAV’s cooperative target tracking and attack[D].Beijing:Beihang University,2010(in Chinese).
[15] Zhong E J,Huang T Z.Geometric dilution of precision in navigation computation[C]//Proceedings of the Fifth International Conference on Machine Learning and Cybernetics.Piscataway,NJ:IEEE,2006:4116-4119.
[16] Gasparri A,Pascucci F.An interlaced extended information filter for self-localization in sensor networks[J].IEEE Transactions on Mobile Computing,2010,9(10):1491-1504.
猜你喜歡
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
房地產導刊(2022年5期)2022-06-01 06:20:14
環球時報(2022-05-30)2022-05-30 15:16:57
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
