基于OOSM-PF的微弱目標檢測前跟蹤*
2015-12-26 05:58:11譚順成王國宏于洪波關成斌
彈箭與制導學報 2015年3期
譚順成,王國宏,于洪波,關成斌
(海軍航空工程學院信息融合技術研究所, 山東煙臺 264001)
基于OOSM-PF的微弱目標檢測前跟蹤*
譚順成,王國宏,于洪波,關成斌
(海軍航空工程學院信息融合技術研究所, 山東煙臺264001)
摘要:由于量測數據預處理以及通信延遲等因素的影響,集中式融合跟蹤系統面臨著無序量測的問題。針對低信噪比和無序量測情況下的微弱目標檢測與跟蹤,提出了一種基于無序量測和粒子濾波的檢測前跟蹤方法,然后將該方法的性能與順序量測濾波方法以及丟棄無序量測方法的性能進行分析對比。仿真結果表明,該算法可以有效處理無序量測問題,實現對微弱目標的有效檢測和跟蹤,其目標跟蹤精度接近順序量測濾波的跟蹤精度。
關鍵詞:無序量測(OOSM);粒子濾波(PF);檢測前跟蹤(TBD);微弱目標跟蹤
0引言
目前的OOSM濾波方法主要包括4種:丟棄OOSM法、重濾波法、數據緩存法以及直接更新法等[1]。其中直接更新法利用OOSM更新當前時刻的狀態估計,具有存儲量小,計算量小,跟蹤精度接近有序量測濾波等特點,是目前國內外學者研究的重點[2-10]。但是,以上方法都是針對目標信噪比較高的情況,沒有涉及目標的檢測問題,難以實現對低信噪比下的微弱目標進行有效跟蹤。據作者所知,目前尚未有關于低信噪比下的OOSM濾波方法的報道。
檢測前跟蹤算法[11-14]是一種復雜環境下對微弱目標進行探測的有效方法,而基于粒子濾波的TBD算法因對非線性非高斯系統具有較好的適應性,是目前研究的熱點[12-14]。文中充分利用TBD算法在檢測和跟蹤微弱目標方面的突出優點,提出了一種低信噪比情況下基于OOSM-PF的TBD方法,同時實現OOSM情況下對微弱目標的有效檢測和跟蹤。仿真結果表明了該算法的有效性和優越性。
1基于OOSM-PF的TBD方法
1.1 系統模型
(2)wk為過程噪聲,其協方差為Qk,k-1。
(3)定義目標初始存在概率η1=P{E1=1}。

(4)其中:
(5)

(7)

(9)式中:Ci(xk)和Cj(xk)表示所有受目標影響的分辨單元坐標(i,j)的集合。
1.2 OOSM下的粒子權重更新
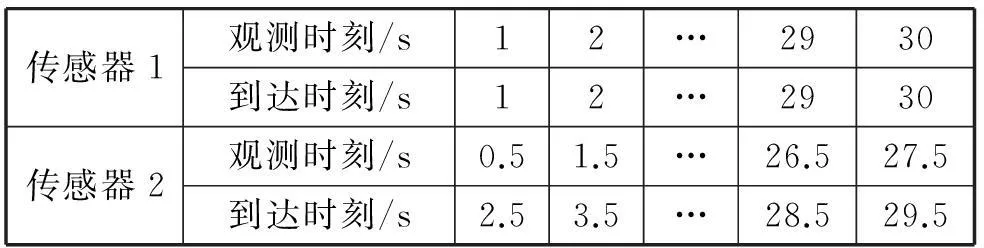
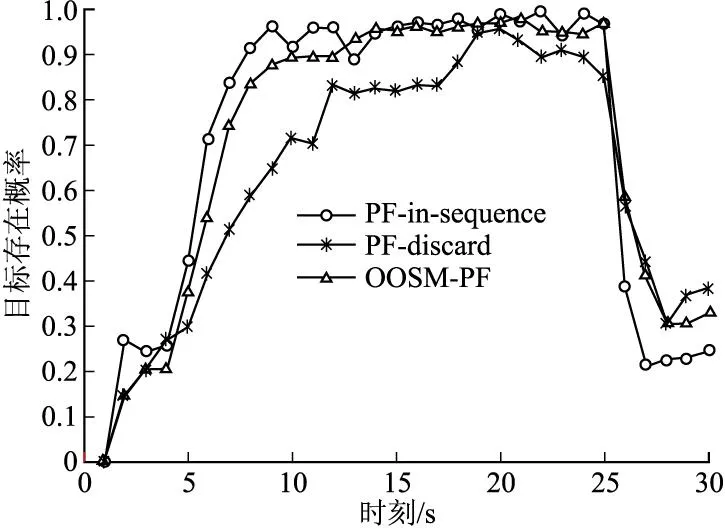
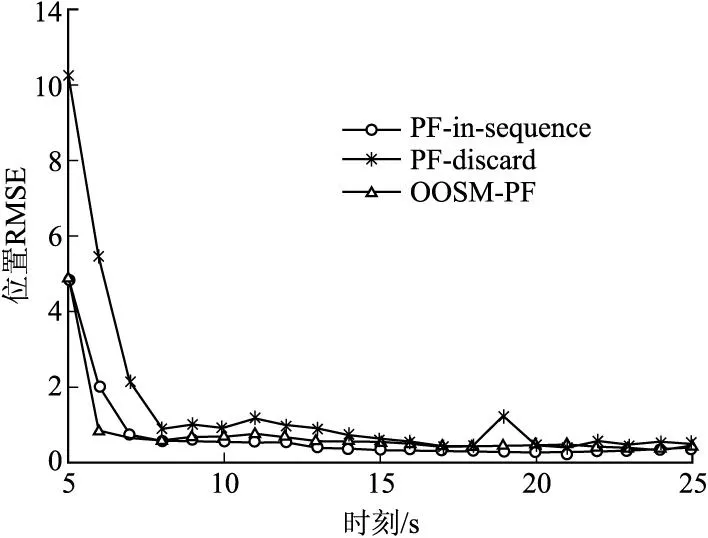
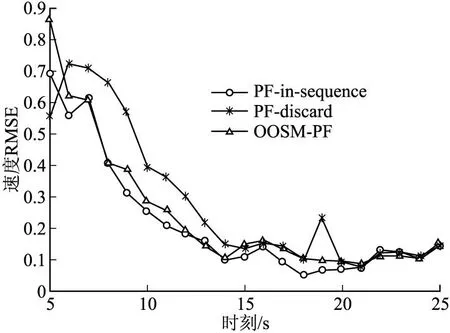
假設k時刻的量測zk被確定為無序量測,即其被觀測到的時刻滿足tk p(x0:k|z1:k)=p(x0:k-1|z1:k-1)× p(zk|xk)p(xk|xb,xa)p(x0:k-1|z1:k-1) (10) (14) (15) (16) 步驟1:k=0,根據初始分布得到初始化粒子集S0,令Ω0={S0}; 步驟2:令k=k+1,判斷zk是否為無序量測,這里分兩種情況進行處理: 情況1:zk不是OOSM 3)粒子權重更新,引入像素似然比[11]: (17) (18) (19)4)粒子重采樣[11] (20) 得到Sk,文中采用系統重采樣法進行粒子重采樣。 (22) 6)利用Sk對Ωk-1進行更新,得到Ωk,轉步驟2。 情況2:zk為OOSM 1)根據OOSM的被觀測時刻tk確定OOSM的前一時刻b以及后一時刻a; 2)粒子狀態預測及粒子權重更新,對任意r∈{1,2,…,N}同樣分兩種情況進行討論: 3)粒子權重更新,同情況1的3); 4)粒子重采樣 (23) 值得注意的是,此處僅利用OOSM更新k-1時刻的粒子權重,然后在此基礎上進行重采樣; 2實驗仿真 本節設置一個與文獻[11]相同的機動弱目標的運動場景進行實驗仿真,濾波器的基本參數也同文獻[11]。不同之處在于文獻[11]采用的單傳感器,不存在OOSM問題。 設有兩個傳感器對目標進行觀測,采樣間隔均為1 s。表1描述了融合中心收到量測數據的時序情況,每個量測數據標有觀測時刻和傳感器ID號。 表1 各傳感器量測觀測時刻和實際到達時刻 從表1可以看出,傳感器2的量測較傳感器1的量測延遲了2個時刻到達,為多步延遲OOSM的情況。 為了驗證算法的性能,將文中構造的算法與順序量測濾波方法和丟棄OOSM方法進行仿真分析和比較。為方便描述,此處以PF-in-sequence、PF-discard以及OOSM-PF分別表示順序量測濾波方法、丟棄OOSM方法以及文中算法。圖1~圖3分別給出了3種算法估計的目標存在概率、估計的目標位置均方根誤差(RMSE)以及估計的目標速度RMSE,仿真結果為30次Monte Carlo仿真取平均的結果。由仿真條件可知,第5 s至25 s目標真實存在于監測區域,其他時刻監測區域內不存在目標。 由仿真結果可知,文中構造的OOSM-PF算法與PF-in-sequence算法性能相當。此外,若假定某一時刻估計的目標存在概率大于或等于0.6(如圖中虛線所示),則認為當前時刻監測區域內存在目標,PF-in-sequence和OOSM-PF均只延遲1個時刻即檢測出目標,當濾波達到穩定后,其估計的目標存在概率較高,接近于1,而PF-discard則延遲了4個時刻才檢測出目標,且濾波達到穩定后其估計的目標存在概率較其他兩種算法低,如圖1所示。從圖2和圖3可以看出,PF-in-sequence和OOSM-PF比PF-discard具有更快的收斂速度。 圖1 估計的目標存在概率 圖2 估計的目標位置RMSE 圖3 估計的目標速度RMSE 3結論 為解決低信噪比和OOSM情況下的微弱目標跟蹤,文中研究了一種基于OOSM-PF的微弱目標TBD方法。仿真結果表明,該算法對微弱目標的檢測與跟蹤性能接近于順序量測濾波算法的性能,可以有效實現無序量測情況下對微弱目標的有效檢測與跟蹤。 參考文獻: [1]王煒, 黃心漢, 王敏. 無序量測濾波更新算法綜述 [J]. 控制與決策, 2012, 27(1): 1-7. [2]BAR-SHALOM Y, CHEN H M, Mallick M. One-step solution for the multistep out-of-sequence-measurement problem in tracking [J]. IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(1): 27-37. [3]BAR-SHALOM Y, HUIMIN C. IMM estimator with out-of-sequence measurements [J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(1): 90-98. [4]ZHOU W H, LI L, CHEN G H, et al. Optimality analysis of one-step OOSM filtering algorithms in target tracking [J]. Science China Information Sciences, 2007, 50(2): 170-187. [5]ZHANG K S, LI X R, ZHU Y M. Optimal update with out-of-sequence measurements [J]. IEEE Transactions on Signal Processing, 2005, 53(6): 1992-2004. [6]SHEN X J, ZHU Y M, SONG E B, et al. Optimal centralized update with multiple local out-of-sequence measurements [J]. IEEE Transactions on Signal Processing, 2009, 57(4): 1551-1562. [7]ORTON M, MARRS A. Particle filters for tracking with out-of-sequence measurements [J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(2): 693-702. [8]CHEN J G, LI J, GAO X B. Single-step-lag OOSM algorithm based on unscented transformation [J]. Science China Information Sciences, 2011, 54(3): 664-673. [9]余安喜, 楊宏文, 胡衛東, 等. 無序量測的次優遞推濾波器 [J]. 電子學報, 2004, 32(6): 960-964., 黃心漢, 王敏. 無序量測濾波更新算法綜述 [J]. 控制與決策, 2012, 27(1): 1-7. [2]BAR-SHALOM Y, CHEN H M, Mallick M. One-step solution for the multistep out-of-sequence-measurement problem in tracking [J]. IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(1): 27-37. [3]BAR-SHALOM Y, HUIMIN C. IMM estimator with out-of-sequence measurements [J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(1): 90-98. [4]ZHOU W H, LI L, CHEN G H, et al. Optimality analysis of one-step OOSM filtering algorithms in target tracking [J]. Science China Information Sciences, 2007, 50(2): 170-187. [5]ZHANG K S, LI X R, ZHU Y M. Optimal update with out-of-sequence measurements [J]. IEEE Transactions on Signal Processing, 2005, 53(6): 1992-2004. [6]SHEN X J, ZHU Y M, SONG E B, et al. Optimal centralized update with multiple local out-of-sequence measurements [J]. IEEE Transactions on Signal Processing, 2009, 57(4): 1551-1562. [7]ORTON M, MARRS A. Particle filters for tracking with out-of-sequence measurements [J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(2): 693-702. [8]CHEN J G, LI J, GAO X B. Single-step-lag OOSM algorithm based on unscented transformation [J]. Science China Information Sciences, 2011, 54(3): 664-673. [9]余安喜, 楊宏文, 胡衛東, 等. 無序量測的次優遞推濾波器 [J]. 電子學報, 2004, 32(6): 960-964. [10]葛泉波, 馮肖亮, 徐廷梁. 不確定無序量測系統的最優網絡化狀態估計 [J]. 電子學報, 2011, 39(3A): 7-13. [11]RISTIC B, ARULAMPALAM S, GORDON N. Beyond the Kalman filter [M]. Artech House, 2004: 239-251. [12]RUTTEN M G, GORDON N J, MASKELL S. Recursive track-before-detect with target amplitude fluctuations [J]. IEE Proceedings Radar, Sonar and Navigation, 2005, 152(5): 345-352. [13]HLINOMAZ P, HONG L. A multi-rate multiple model track-before-detect particle filter [J]. Mathematical and Computer Modeling, 2009, 49(1/2): 146-162. [14]LONG Y L, XU H, AN W, et al. Track-before-detect for infrared maneuvering dim multi-target via MM-PHD [J]. Chinese Journal of Aeronautics, 2012, 25(2): 252-261. 收稿日期:2014-05-27 基金項目:國家自然科學基金(61179018;61102165;61102167;61002006);航空科學基金(20115584006);“泰山學者”建設工程專項經費資助 作者簡介:譚順成(1985-),男,湖南湘潭人,講師,博士,研究方向:信息融合、雷達數據處理。 中圖分類號:TN953 文獻標志碼:A OOSM-PF Based Weak Target Track-before-detect TAN Shuncheng,WANG Guohong,YU Hongbo,GUAN Chengbin (Institute of Information Fusion Technology, Naval Aeronautical and Astronautical University, Shandong Yantai, 264001, China) Abstract:entralized fusion tracking system out-of-sequence measurement (OOSM) due to the factors as different pre-processing time and communication delay of measurements. of weak target detection and tracking with low signal-to-noise ratio (SNR) and OOSM, a track-before-detect (TBD) method proposed based on OOSM and particle filter (PF). Furthermore, the performance of the proposed method compared with that of traditional discarding method and in-sequence measurement filtering method. The simulation results demonstrate that the proposed method can solve the problem of OOSM and detect and track weak target efficiently with the performance of target tracking is close to that of the in-sequence measurement filtering. Keywords:out-of-sequence measurement (OOSM); particle filter (PF); track-before-detect (TBD); weak target tracking


1.3 基于OOSM-PF的算法實現