視頻圖像處理技術在保障機車調車作業安全方面的研究與實踐
2015-12-30 03:31:52遲學力
鐵道通信信號 2015年10期
遲學力
隨著LKJ的推廣運用,機車正線牽引安全事故基本得到消滅,但調車作業安全事故變得較為突出。目前,調車作業事故約占鐵路系統總事故的60%-70%,加強調車作業的安全控制對穩定鐵路安全生產局面具有十分重要的意義。
1 調車作業安全預警必要性
調車作業是鐵路運輸生產必不可少的作業。專用調車機由于作業地點相對固定,安裝有專用調車監控裝置,可以對調車作業事故進行有效防控。正線機車主要業務是正線牽引列車,但有時也會從事調車作業。由于其調車作業涉及的站場不定,所以不適宜安裝專用調車監控裝置,因而其調車作業過程缺乏機控手段,其作業安全主要依靠乘務員人工保證,存在較大安全隱患。
調車作業常見事故有:碾軋脫軌器、調車沖突、擠壓道岔等。脫軌器是為了防止列檢人員在檢車作業時,因機車或列車進入此線路,對列檢人員造成傷害而設置的防護裝置。脫軌器由兩部分組成:表示器和脫軌裝置,如圖1所示。

圖1 脫軌器組成示意圖
表示器在當前列車行進方向的左側;脫軌裝置為白色鑄鐵件,啟用狀態下覆蓋在列車行進方向的左側鋼軌上,列車輾壓時會致使列車脫軌,從而保證列檢人員的安全。正線機車調車作業安全預警系統采用視頻圖像實時處理技術,對脫軌器及其狀態進行自動識別,必要時對乘務員進行報警或提示,是保障作業人員安全的重要設備。
2 調車作業安全預警系統結構
正線機車調車作業安全預警系統,對脫軌器的檢測分為脫軌器表示器檢測和當前軌道檢測二部分。檢測脫軌器表示器以確定脫軌器是否啟用,檢測當前軌道是確定脫軌器是否對當前軌道有效。系統由圖像采集單元和檢測主機二部分組成,通過以太網進行信息交互,如圖2所示。
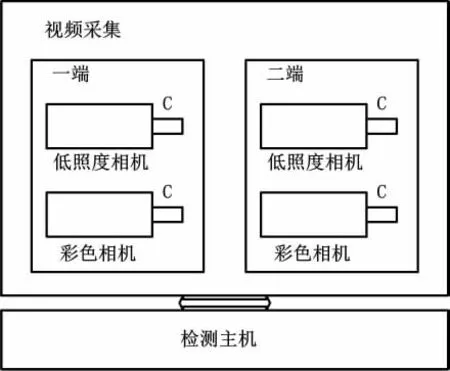
圖2 系統結構圖
圖像采集單元核心部分由4臺安裝在機車兩端司機室中的專用相機組成,每端包括一臺低照度相機和一臺彩色相機。低照度相機負責采集軌道圖像,彩色相機負責采集脫軌器表示器圖像;而檢測主機負責對圖像進行智能分析,即首先對彩色相機采集得到的圖像進行識別,判斷脫軌器是否啟用,并得到脫軌器的位置坐標,然后對低照度相機得到的圖像進行識別,確定當前運行軌道,并判斷脫軌器坐標是否在當前軌道的左側,最終確定當前軌道左側脫軌器是否啟用。
3 表示器檢測
3.1 顏色分割
正常情況下,脫軌器表示器在啟用狀態下為紅色,因此,紅色信息就成為了識別脫軌器的重要信息之一。通過對顏色的分割,能夠減少待處理的信息總量,把脫軌器所在的區域提取出來。彩色相機輸出的是RGB圖像,而RGB色彩空間的圖像受光照影響較大,不適合用作顏色信息提取。因此,為避免光照的影響,可以將原圖像先變換到HSV(hue,saturation and intensity)色彩空間,然后對紅色標識牌進行分割。HSV色彩空間如圖3所示。
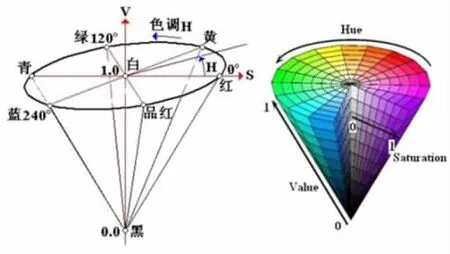
圖3 HSV色彩空間
紅色的HSV空間分布在H分量的 [0,20]與 [340,360]區間上和S大于0.5的區間上。根據以上結論,在HSV空間上對紅色進行分割,如圖4所示。
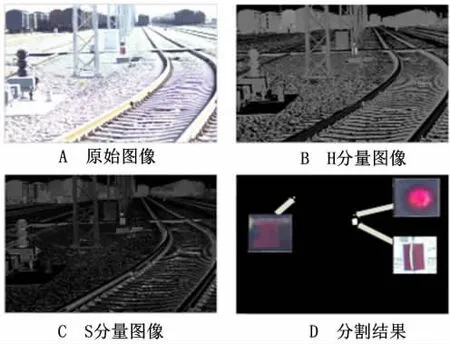
圖4 圖像分割結果
3.2 去除誤檢測
由于現實環境中色彩比較復雜,因此顏色特征不能成為識別脫軌器表示器的唯一標識,在基于顏色的分割中可能會出現誤檢測的現象。如圖4中D圖所示,分割出的結果不但有表示器,還有紅色指示燈和遠處的紅色旗幟。因此,需要根據脫軌器表示器的形狀、梯度直方圖等其他特征進行校驗,去除誤檢測的部分。算法分為以下2步:
1.形狀檢驗。脫軌器表示器是一個矩形紅牌,可以對圖4中D圖分割出的圖像進行邊緣提取,對邊緣進行直線檢測,判斷是否存在大于一定距離的平行線,如果不存在,則不是脫軌器表示器。
2.梯度直方圖信息。對于形狀檢測的結果,取圖像的梯度直方圖信息(HOG),作為樣本特征,采用支持向量機(SVM)的方法,對樣本進行分類,去除誤檢測。檢測結果如圖5所示,黑色矩形區域為檢測到的脫軌器表示器。
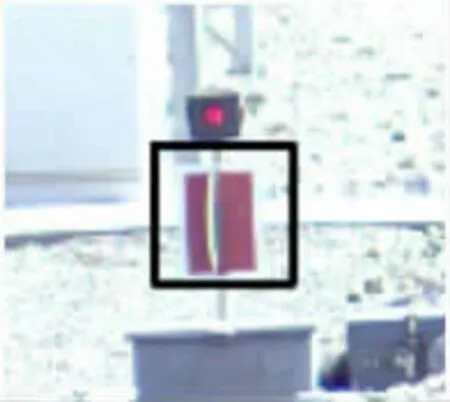
圖5 表示器檢測結果
4 當前軌道檢測
4.1 當前軌道檢測原理
我國鐵路建設采用軌距為1435mm的標準鐵軌。為進行軌道檢測,需建立軌道模型,如圖6A所示。相機安裝在車頭前方,且與地面有一定角度向下拍攝圖像,得到的圖像模型如圖6B所示。由于視角的問題,在圖6B上軌道已經不再是平行的,離相機越遠,2條軌道之間的距離越近,最終相交到遠處一點。由于作為軌道特征的平行特性在相機獲得的圖像上不能顯現出來,所以將圖像投影到鳥瞰的視角上 (從空中垂直俯視的視角),如圖6C所示。在鳥瞰圖上,軌道則變成了平行的曲線。
當前軌道檢測的主要步驟:首先通過IPM(Iverse Perspective Mappinh,逆透視投影變換)將相機中獲取的原始圖像生成鳥瞰圖,然后進行平行曲線檢測,確定中心線,最后將中心線從鳥瞰圖透視變換到原始圖像上,確定當前軌道在原始圖像上的中心線坐標。
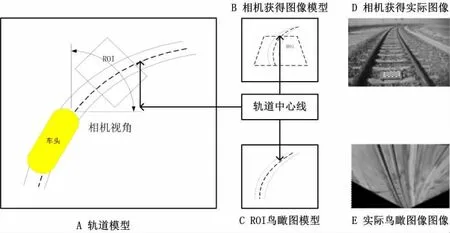
圖6 軌道檢測示意圖
4.2 IPM變換
定義世界坐標系為 {FW}= {XW,YW,ZW},原點為相機的光心,相機坐標系為 {FC}= {XC,YC,ZC},圖像坐標系為{Fi}={u,v},定義α為俯視角 (Pitch angle),β為偏移角 (yaw angle)如圖7所示。
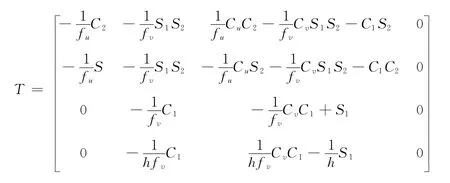
根據上述關系可以計算出單應矩陣T。
其中,fu為相機內參中的水平焦距,fv為相機內參中的垂直焦距,Cu為相機內參中的水平光心坐標,Cv為相機內參中的垂直光心坐標,C1=cosα,C2=cosβ,S1=sinα,S2=sinβ,h為相機光心離地面的高度。根據T可以計算出鳥瞰圖。如圖6D、6E所示。
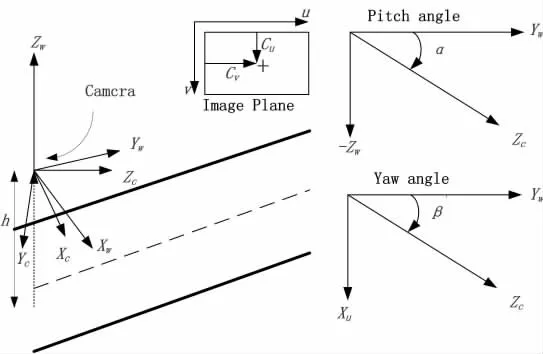
圖7 IPM坐標系關系
4.3 平行曲線檢測
將得到的鳥瞰圖水平分割十段,對每段圖像進行平行直線檢測,根據平行線的距離,計算出候選的平行線對。將平行線對應的中線連接到一起,形成軌道的中心線。然后通過T的逆矩陣將中心線坐標重新映射回原始圖像。
5 小結
基于視頻圖像識別技術設計的正線機車調車作業安全預警裝置,可以較好地識別脫軌器狀態,并對乘務員及時進行預警,從而有效防止正線機車調車作業過程中誤軋脫軌器的作業事故。但是,在實際應用過程仍然存在一些問題,例如,夜晚工作時,由于光線情況比較復雜,各種光干擾較多,光線投射到軌道上會出現光斑,加上擋風玻璃的衍射作用,造成軌道圖像采集單元采集到的軌道圖像清晰度降低,軌道識別正確率有所降低,有時甚至無法檢測到軌道。如何提高夜晚狀態下軌道檢測的識別準確率是下一步研究的重點。
[1] 林立新,楊宏偉.GPS定位的調車系統.機車電傳動[J],2004(4).
[2] Aly,M.Real time Detection of Lane Markers in Urban Streets.Intelligent Vehicles Symposium,2008 IEEE,pages 7-12,June 2008.
[3] Michael Gschwandtner,Wolfgang Pree,Andreas Uhl.Track Detection for Autonomous Trains.6th International Symposium,ISVC 2010,Las Vegas,NV,USA,November 29-December 1,2010,Proceedings,Part III.pages 19-28 .2010.
[4] Yue Wang,Eam Khwang Teoh,and Dinggang Shen.Lane detection and tracking using b-snake.Image Vision Comput.,22(4):269-280,2004.
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12