金屬履帶拖拉機支重輪接觸應力分析
2016-01-18 03:55:35張淑芬王文勝魏豪杰侯中華
河南科技大學學報(自然科學版) 2015年2期
張淑芬,靳 麒,王文勝,魏豪杰,侯中華
(河南科技大學 a.土木工程學院;b.藝術與設計學院,河南 洛陽 471023)
金屬履帶拖拉機支重輪接觸應力分析
張淑芬a,靳麒b,王文勝a,魏豪杰a,侯中華a
(河南科技大學 a.土木工程學院;b.藝術與設計學院,河南 洛陽 471023)
摘要:針對金屬履帶拖拉機支重輪斷裂、卷邊時的接觸應力進行分析計算。首先,對支重輪在工作過程中的靜止、重心偏離、牽引力傾斜與重心偏離3種狀態進行了受力分析,并使用接觸理論進行接觸應力的理論計算;然后,利用ANSYS軟件建立支重輪結構的三維有限元模型,對3種工況下的接觸應力進行有限元數值計算。計算結果表明:整機在牽引力傾斜及重心偏離工作狀態下支重輪的接觸應力為最大,尤其對于C1302機型;最大接觸應力在輪緣處。接觸應力的理論計算與數值模擬分析結果非常接近,吻合較好,其誤差不超過5%。
關鍵詞:金屬履帶拖拉機;支重輪;有限元分析;接觸應力
基金項目:河南省科技廳科技攻關基金項目(092102210250)
作者簡介:張淑芬(1953-),女,河南新鄉人,教授,研究方向為機械結構強度分析.
收稿日期:2014-07-16
文章編號:1672-6871(2015)02-0018-04
中圖分類號:S219.2;TB121
文獻標志碼:志碼:A
0引言
中國一拖集團有限公司生產的東方紅金屬履帶拖拉機具有牽引附著性能好、越野性能強、穩定性好等突出優點,尤其在潮濕、黏重土壤上具有更好的實用性能[1]。支重輪是金屬履帶拖拉機行走系統中的重要部件,擔負著整車的承重任務,它與履帶板直接接觸并有相對滾動,露天作業,是數量較大的易損部件。近年來,金屬履帶拖拉機不斷改型,由東方紅75、802、1202到1302,牽引功率不斷增大,但是行走裝置卻基本上無大改動。支重輪的尺寸和技術要求一直未變,仍為每臺車8對,每側4對,每輪外徑350 mm,寬45 mm,厚20 mm,材料為RZG310-570,輪緣表面硬度不低于415HB;履帶板材料為ZGMn13,硬度為156HB~229HB[2]。因此,由支重輪-履帶板組成的系統在使用過程中,支重輪的斷裂與表面磨損較為嚴重,一般400 h即發生嚴重擠壓卷邊或斷裂,需更換新輪。
目前,有不少學者對支重輪接觸問題進行了分析探討。文獻[3-5]對履帶拖拉機支重輪的塑變磨損進行了深入研究。文獻[6]對基于振動能耗的間隔阻尼層合支重輪采取了參數優化。文獻[7-8]對大型履帶行走裝置支重輪和履帶板接觸分析建立了數學模型。文獻[9-10]利用有限元法分析了履帶板和履帶行走裝置支重輪的接觸特性。
本文針對支重輪與履帶板在整機處于靜止、重心偏離、牽引力傾斜與重心偏離3種工作狀態下的接觸應力,利用接觸理論[11]進行了理論計算;并使用ANSYS軟件[12]對支重輪進行數值模擬分析。比較理論計算結果與數值模擬分析結果的一致性及誤差,其目的是為支重輪結構的改進設計提供參考,從而提升支重輪與支重臺車機構的工作性能。
1模型簡化
因為在工作狀態下支重輪與履帶板直接接觸,依據設計圖紙和制造加工實物,支重輪表面沿輪厚方向并非弧面,而履帶板上與支重輪接觸的工作面則為平面,輪與板一旦接觸,履帶板相對于地面處于靜止[13]。故可將其簡化為圓柱面與固定平面的接觸,接觸區域近似為一狹長的矩形,假設為線接觸,如圖1所示。設圓柱輪的半徑為R,由文獻[11]可得出式(1)~式(4)。

(1)

(2)

圖1 圓柱面與平面接觸
式中:b為接觸面的寬度,mm;R為輪半徑,mm;p為單位長度上的荷載,N/mm;Q為接觸應力,MPa;μ1、μ2為滾動摩擦副的泊松比;E1、E2為滾動摩擦副材料的彈性模量,GPa。
當E1=E2=E,μ1=μ2= 0.3時,

(3)

(4)
2支重輪受力分析
對東方紅75、802、1202、1302這4種機型的支重輪受力情況在理論上進行了分析計算[4-5]。各種

表1 東方紅系列拖拉機的質量及牽引力
機型的質量與牽引力如表1所示。
支重輪在工作過程中常見的受力狀態簡化為3種:靜止狀態、重心偏離狀態、牽引力傾斜及重心偏離狀態。
2.1 靜止狀態下支重輪受力分析
支重輪之間為等距,在靜止狀態下的受力情況如圖2所示。G為拖拉機整機質量。

圖2 靜止狀態受力簡圖
在靜止狀態不考慮重心偏移時支重輪受力
FN=G/8=0.125G。
(5)
2.2 重心偏離狀態下支重輪受力分析
在重心偏離狀態下,機車重心偏離的距離,經計算約為300 mm。這時支重輪的受力不再均勻,而是呈線性遞增[1],受力如圖3所示。
根據平面平行力系平衡條件,在鉛垂方向投影,即∑Fy=0,可得方程
FN1+FN2+FN3+FN4=G。
(6)
對C點取矩,即∑MC=0,可得方程
3×540.7×FN1+2×540.7×FN2+540.7×FN3=G×(811-300)。
(7)

圖3 重心偏離狀態受力簡圖
又因為4個力之間為線性關系,則可得到如下方程:
2FN3-FN2=FN4;
(8)
2FN2-FN1=FN3,
(9)
故由以上4個方程可以得出:
FN4=0.416G。
(10)
由于對稱的原因,則輪子承受的最大荷載為:

(11)
2.3 牽引力傾斜及重心偏離狀態下支重輪的受力分析
在牽引力傾斜及重心偏離狀態下,不僅是重力產生了偏離,而且牽引力F也向下傾斜,傾角一般為15°。因此,在垂直方向產生了分力,導致支重輪受力加大,進而使接觸應力加大,其受力分析如圖4所示。
根據平面任意力系平衡條件,在鉛垂方向投影和對D點取矩,即∑Fy=0,∑MD=0,可得如下方程:
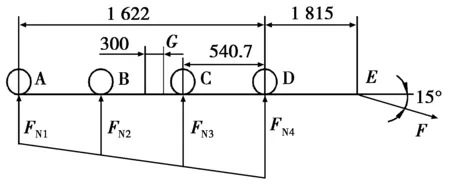
圖4 牽引力傾角和重心偏離狀態受力簡圖
FN1+FN2+FN3+FN4=G+F×sin15°;
(12)
3×540.7FN1+2×540.7FN2+540.7FN3+
F×1 815sin15°=G×(811-300)。
(13)
又因為4個力為線性關系,則可得到方程
2FN3-FN2=FN4;
(14)
2FN2-FN1=FN3。
(15)
由以上4個方程可以得出:
FN4=0.416G+0.442F。
(16)
因為對稱的緣故,則支重輪承受的最大荷載為:

(17)
根據式(5)、式(11)、式(17)和表1及式(1)、式(2)可得到4種機型支重輪在3種工況下共計12種情況時,所受荷載、接觸應力以及支重輪與履帶板的接觸寬度b,分別見表2、表3和表4。

表2 支重輪在3種狀態下所受荷載 kN

表3 支重輪在3種狀態下的

表4 支重輪與履帶板在3種狀態下的
以上對支重輪在3種狀態下所受載荷和接觸應力進行了分析計算,其中,未考慮支重輪輪面的拔模斜度和輪在工作過程中所受的振動沖擊等因素的影響。因拖拉機在工作中支重輪輪面與履帶板接觸的有效長度是變化的,故所受的接觸應力也是變化的。
3支重輪有限元模型建立及求解
在生成支重輪結構有限元網格時,考慮了結構應力計算對網格密度較高的要求,采用ANSYS軟件中Solid185實體單元,取單元長度為8 mm,支重輪結構材料為RZG310-570,即材料為精密鑄鋼,其屈服極限σs= 310 MPa,強度極限σb=570 MPa;材料密度ρ= 7 800 kg/m3,彈性模量E=210 GPa,泊松比μ= 0.3。由此建立支重輪有限元模型。
3.1 支重輪邊界條件和荷載施加
模型建立完成后進行邊界條件和荷載的施加。邊界條件施加在輪軸孔內部以此來固定住支重輪,然后將荷載施加在支重輪輪面上,用接觸理論中公式(3)計算的接觸寬度b,并假設輪面上的接觸應力是均勻分布。邊界條件和荷載施加如圖5所示。

圖5 支重輪的邊界條件和荷載施加
3.2 各種機型支重輪的求解結果
對4種機型在3種狀態、共計12種情況下的接觸應力進行有限元分析,得出支重輪的應力云圖。考慮篇幅,這里只給出東方紅1302機型支重輪在第3種工況下,即牽引力傾角及重心偏移狀態下的應力云圖,如圖6所示。
從圖6可以看出:最大接觸應力集中在支重輪的輪面與輪輻支撐處,因此可以得出支重輪發生斷裂的部位與高應力區是一致的。
輪面的接觸應力分布具有邊緣部分大、中間部分小的特點,由于應力分布的不均勻,使較低硬度和強度的支重輪很容易產生局部比較大的變形,出現卷邊現象。
4種機型支重輪接觸應力有限元分析結果如表5所示。對4種機型在3種狀態下、12種情況時的接觸應力理論計算與有限元分析結果進行比對,見表6。

圖6 牽引力傾角及重心偏移狀態下的應力云圖(單位:MPa)

機型靜止重心偏離牽引力傾斜及重心偏離7512422728580213724529612021452633151302147275355

表6 4種機型在3種狀態下、12種情況時支重輪接觸應力理論計算與有限元分析結果
4結論
本文針對東方紅金屬履帶拖拉機支重輪結構,利用接觸理論和ANSYS軟件完成了支重輪接觸應力計算與分析,確定了支重輪結構上最大接觸應力在輪緣處。從理論計算和ANSYS分析的結果來看,3種狀態下的最大接觸應力值變化不大。理論計算值與有限元分析值誤差在5%以內。支重輪的接觸應力在靜止狀態下是最小的,而在牽引力傾斜及重心偏離狀態下則為最大。
參考文獻:
[1]機械電子工業部洛陽拖拉機研究所.拖拉機設計手冊[M].北京:機械工業出版社,1994:225-226.
[2]吉林工業大學.拖拉機底盤結構設計圖冊[M].北京:機械工業出版社,1994:354-357.
[3]謝敬佩,王文炎,王愛琴,等.履帶拖拉機支重輪的塑變磨損研究[J].農業機械學報,2003,34(15):150-153.
[4]張殿武,謝敬佩,張益華,等.東方紅履帶拖拉機支重輪形變機制[J].拖拉機和農用運輸車,2001(5):19-22.
[5]張益華,王愛琴,陳殿云,等.支重輪履帶板接觸應力的有限元分析[J].拖拉機和農用運輸車,2004(1):34-36.
[6]燕碧娟,孫大剛,宋勇,等.基于振動能耗的間隔阻尼層合支重輪參數優化[J].農業工程學報,2011,27(1):175-179.
[7]閆振華,王國強,姚宗偉,等.大型履帶行走裝置支重輪和履帶板接觸分析[J].農業工程學報,2012,28(12):51-56.
[8]張翼飛,邢星.大型履帶支重輪接觸應力分析[J].中國新技術產品,2014(2):132.
[9]蘇寶程.基于有限元分析的履帶板和履帶行走裝置支重輪接觸特性分析[J].煤礦機械,2014,35(8):107-109.
[10]范京紅,張曙彩,姚雪俠,等.東方紅-C1202履帶拖拉機[J].拖拉機和農用運輸車,2010(3):87-88.
[11]白明華,劉洪彬.工程彈性力學基礎[M].北京:機械工業出版社,1996:105-106.
[12]胡仁喜,徐東升,李亞東,等.ANSYS13.0機械與接觸結構有限元分析[M].北京:機械工業出版社,2011:60-129.
[13]曹付義,劉洋,周志立.履帶車輛軟地面穩態轉向驅動力計算模型[J].河南科技大學學報:自然科學版,2014,35(2):29-32.

