輕型貨車的彎道安全性自動換擋規律
2016-01-18 03:55:37周志立郭志強徐立友
河南科技大學學報(自然科學版) 2015年2期
符 冉,周志立,郭志強,徐立友
(1.河南科技大學 車輛與交通工程學院,河南 洛陽 471003;2.中國一拖集團有限公司,河南 洛陽 471003)
輕型貨車的彎道安全性自動換擋規律
符冉1,周志立1,郭志強2,徐立友1
(1.河南科技大學 車輛與交通工程學院,河南 洛陽 471003;2.中國一拖集團有限公司,河南 洛陽 471003)
摘要:針對輕型貨車在彎道行駛速度過快時,有側滑、側翻風險的問題,運用模糊控制的方法,設計了擋位修正模塊,嵌入自動變速器換擋模塊中,對擋位進行修正。基于提出的修正型換擋規律,以某輕型貨車為研究對象,建立其整車模型,進行仿真驗證。研究結果表明:修正型換擋規律通過對擋位的控制,平均降低車速11.6 km/h,避免了側翻事故的發生,提高了行駛安全性。該研究為換擋規律的理論完善和實車運用提供了依據。
關鍵詞:輕型貨車;彎道安全性;換擋規律;智能修正
基金項目:河南省重點科技攻關計劃基金項目(142102210424);河南省教育廳重點科技攻關計劃基金項目(14B460015);河南省重點產學研合作項目(132107000052)
作者簡介:符冉(1985-),男,河南南陽人,碩士生;周志立(1957-),男,河南偃師人,教授,博士,博士生導師,主要研究方向為車輛新型傳動理論與控制技術.
收稿日期:2014-09-30
文章編號:1672-6871(2015)02-0022-04
中圖分類號:U469.2
文獻標志碼:志碼:A
0引言
換擋規律是指自動變速器的擋位隨換擋參數變化的規律。擋位調節性能的好壞,直接影響到車輛的動力性、經濟性、排放性、安全性和舒適性等[1-3]。因此,研究換擋規律有著極其重要的理論和現實意義。換擋規律經過多年的發展,已由最初的單參數、兩參數換擋規律發展為后來的三參數和四參數換擋規律[4-5]。隨著智能控制理論的發展,模糊控制和神經網絡控制技術等被越來越多地運用到換擋規律的制定與修正中[6-7]。
關于換擋規律的研究,前人多集中于改善車輛的動力性、經濟性及避免頻繁換擋等方面[4-7],而對于安全性方面的研究較少。近年來,隨著汽車保有量的不斷增加,交通傷亡事故呈遞增趨勢,行車安全性越來越引起人們的重視[8]。因此,在安全備受關注的情況下,研究制定輕型貨車彎道換擋規律,對控制貨車車速、提高其行駛安全性有著重要意義。本文在已有換擋規律的基礎上,通過對輕型貨車彎道運動學狀態進行分析,提出了一種基于安全性考慮的彎道換擋修正規律。
1輕型貨車彎道行駛的運動學分析
研究輕型貨車在彎道行駛時的穩定性,需要建立其彎道行駛的物理模型。復雜的模型不僅參數繁多,而且不易突出主要矛盾。為了更好地分析貨車彎道行駛操縱穩定性的本質特性,本文將對貨車系統做出如下簡化:
(Ⅰ)忽略輕型貨車懸架及其輪胎的彈性形變,將之簡化為一個剛體。
(Ⅱ)忽略轉向系,以外轉向輪轉角作為系統的輸入。
(Ⅲ)忽略路面不平及車身俯仰、彈跳等對貨車穩定性的影響,將之看作一個準靜態的轉向運動。
貨車在彎道運輸貨物時,側向受力會急劇增大。其主要由側向摩擦力提供向心力,維持其轉彎運行。當轉彎速度過大時,則有側翻風險。由文獻[9-10]可知:
(1)
G=mg;
(2)

(3)
式中:Q為向心力,N;G為重力,N;L為軸距,m;M為前軸主銷中心距,m;v為車速,km/h;R為質心處轉彎半徑,m;m為質量,kg;g為重力加速度,m/s2;θ為外轉向輪轉角,rad。
車輛發生側翻的條件[9]為:

(4)
式中:H為重心高度,m;B為轉向輪輪距,m。
由式(1)~式(4)可得貨車發生側翻的臨界速度為:

(5)
式中,v0為貨車側翻速度,km/h。
由式(5)可知:在彎道行駛時,如果車速超過臨界速度v0則會發生側翻。雖然側翻為短暫的不穩定狀態,但卻會導致車毀人亡等不可挽回的損失。一般在車輛發生側翻前已經發生側滑,側滑同樣對車輛的安全性構成一定的威脅。因此,在彎道行駛時,必須減速慢行,將車速控制在一定的安全范圍內。
2智能修正型彎道換擋規律
由上述分析可知:在貨車行駛工況已經明確的情況下,輸入外轉向輪轉角,由式(5)可得側翻速度v0。代入車速計算公式[9]:

(6)
式中:r為驅動輪半徑,m;n為發動機轉速,r/min;ig為變速器傳動比;i0為主減速器傳動比。
整理后得出車輛彎道安全行駛變速器可用最小傳動比為:

(7)
式中:ne為發動機額定輸出轉速,r/min;ig min為變速器可用最小傳動比。

圖1 貨車彎道換擋修正邏輯圖
將ig min與車輛變速器已有傳動比相比較,選取最接近ig min所對應的擋位為安全行駛可用最大輸出擋位的初定值。同時,將雨雪天氣、特殊地形等外部環境因素對安全行駛的影響加以考慮,最終可確定出轉向輪一定轉角下對應的安全行駛可用最大擋位。當貨車彎道行駛車速大于安全車速時,則調用安全行駛可用最大擋位,直至彎道運行階段結束;當車速處于安全范圍之內,則原擋位保持不變。換擋修正控制邏輯如圖1所示。
由于環境因素比較復雜,很難建立精確的數學模型來指導換擋規律。因此,可以通過模糊控制的方法,建立以轉向輪轉角和外界綜合環境因素為輸入量,變速器可用最大擋位為輸出量的雙輸入單輸出型模糊控制器[11]。以此模糊控制器對傳統換擋規律進行修正。
根據需要,控制器輸入輸出量的語言集分別為:
轉向輪轉角θ:{很小(VS)、小(S)、中(M)、大(B) }。
環境因素e:{良好(G)、中(M)、差(B)、極差(VB)}。
可用最大擋位g:{高(H)、中(M)、低(L)、很低(VL)}。
當論域中元素總數為模糊子集總數的2~3倍時,模糊子集對論域的覆蓋程度較好[12]。根據這一原則,輸入輸出量的論域設置如下:
Xθ:{0,1,2,3,4,5,6,7,8,9,10};
Xe:{0,1,2,3,4,5,6,7,8,9,10};
Yg:{0,1,2,3,4,5,6,7,8}。
然后,利用三角梯形隸屬法分別對θ、e、g建立隸屬函數,結果如圖2所示。
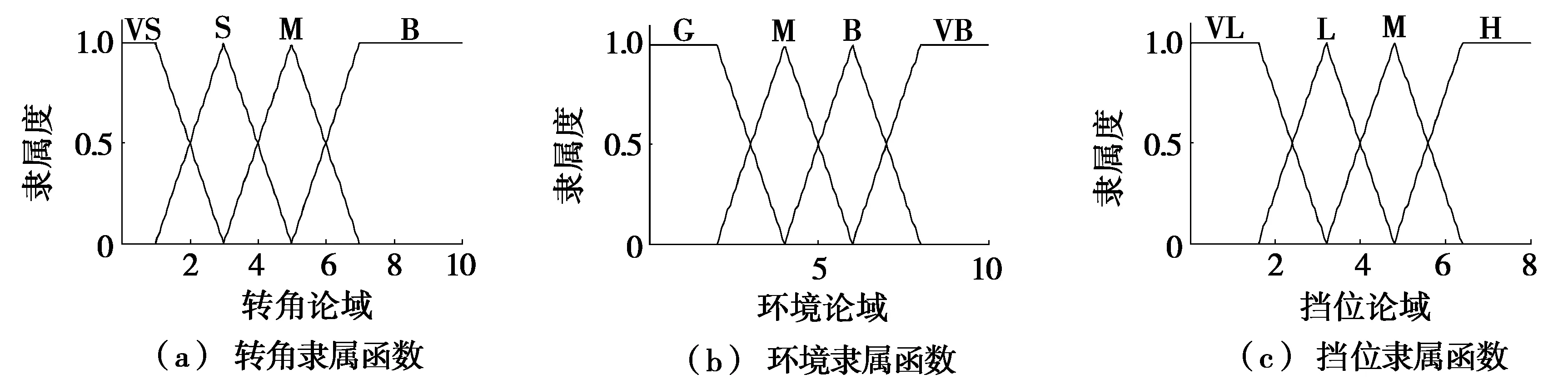
圖2 各變量隸屬函數圖

轉向輪轉角綜合環境狀況GMBVBVSHHMMSMMSSMSSVSVSBVSVSVSVS
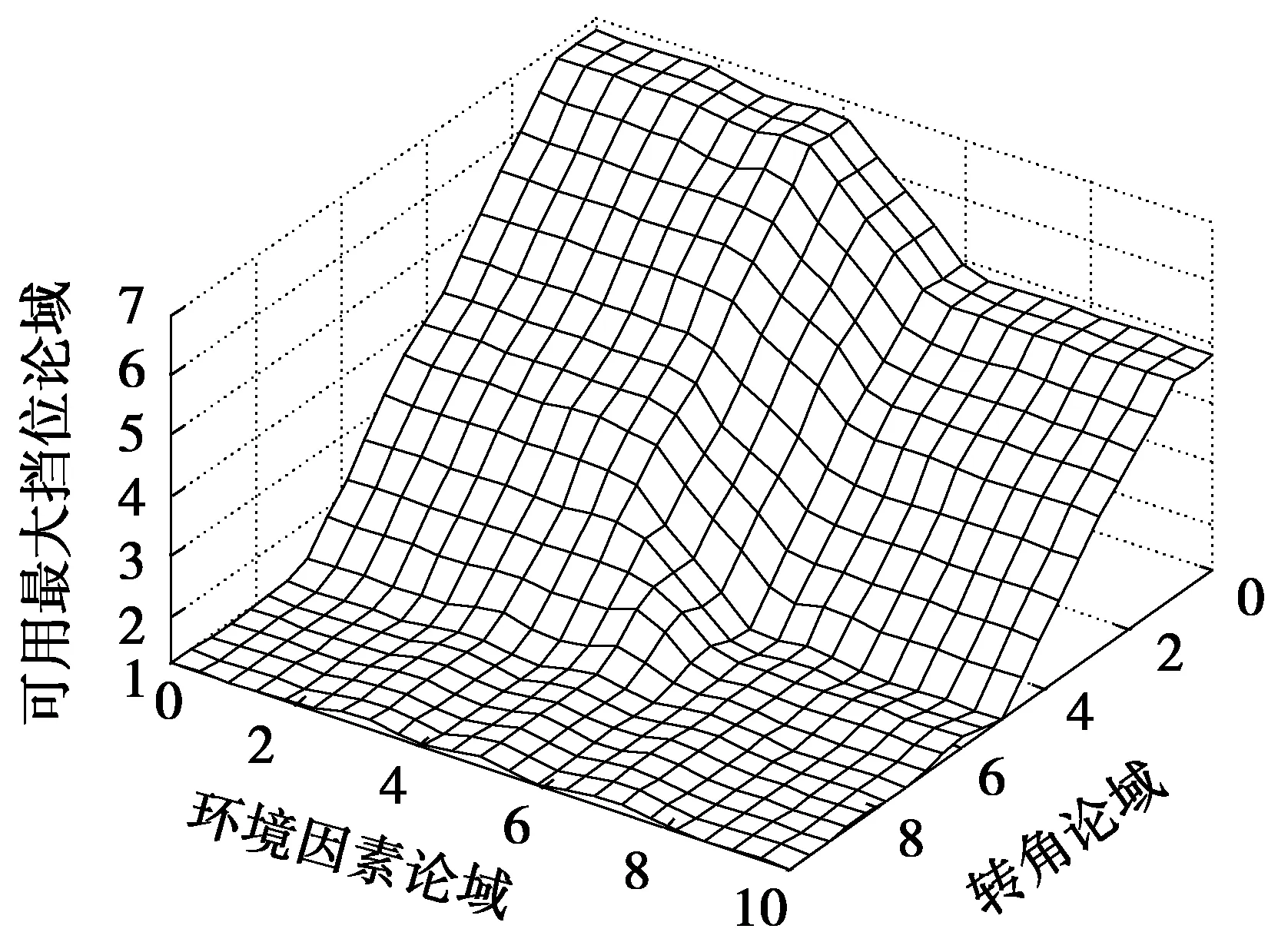
圖3 換擋曲面
根據式(7),考慮環境因素并結合優秀駕駛員的經驗可得安全行駛條件下可用最大擋位。將各工況下可用最大擋位匯總,可得如表1所示的模糊控制換擋規則庫。根據換擋規則庫可制得模糊控制器。控制器彎道換擋控制曲面如圖3所示。將制得的模糊控制器嵌入換擋模塊內,實現對貨車彎道行駛時擋位的控制。
3換擋規律的仿真驗證
為驗證本模糊控制器對輕型貨車彎道行駛安全性的改進效果,本文以某輕型貨車在彎道運輸為例,采用自動變速器,運用Matlab/Simulink軟件進行安全性換擋仿真,并與傳統三參數(車速、油門開度和加速度)換擋規律進行對比。貨車相關參數取值見表2,傳動比取值[13]見表3。選取運輸環境為一般,轉向輪轉角為小轉角,仿真以中速較大油門在道路運輸為例,其中5~15 s為彎道轉彎階段,其余時間為直道行駛階段。

表2 某貨車相關參數

表3 某貨車傳動比
仿真結果如圖4和圖5所示,圖4為擋位對比圖,圖5為車速對比圖。仿真結果表明:在直道行駛階段,修正規律和傳統換擋規律對擋位與車速的控制基本一致;當進入彎道后,修正規律根據環境和轉向輪轉角的大小,有效控制擋位,平均降低車速11.6 km/h,預防了側翻事故的發生。相比傳統換擋規律,彎道換擋修正規律不僅繼承了傳統換擋規律的一些優點,而且可智能地識別彎道,提高了車輛行駛的安全性。

圖4 換擋曲線對比圖圖5 車速對比圖
4結論
(1)通過對車輛彎道運動狀態進行分析,得出彎道行駛安全性與車身結構、轉向輪轉角以及環境因素的關系。當車輛重心越高、軸距越小、轉向輪轉角越大、環境越差時,則彎道行駛時側翻的風險就越大;反之,風險則較小。
(2)設計了彎道換擋模糊控制器,對傳統換擋規律進行修正,既繼承了傳統換擋規律的優點,又考慮了行駛的安全性。
(3)運用Matlab/Simulink軟件,進行建模仿真,驗證了安全性換擋修正規律的合理性。
參考文獻:
[1]崔功杰.工程車輛三參數最佳換擋規律及控制方法的研究[D].長春:吉林大學,2009.
[2]候亮,官登.工程車輛的綜合換擋規律研究[J].中國工程機械學報,2013,11(3):105-107.
[3]Sun Y Z,Xiong W,Yao Y F.Methods for the Gear-position Decision in AMT[J].Journal of Beijing Institute of Technology,2003,12(2):220-224.
[4]李強,師帥兵,柳和玲.拖拉機自動換擋規律研究[J].農業化研究,2012,34(5):221-223,227.
[5]鮑金鋒.工程車輛新型三參數換擋規律的研究[D].長春:吉林大學,2011.
[6]楊偉斌,陳全世.智能修正型換擋規律的設計及在雙離合器式自動變速器中的應用[J].機械工程學報,2009,45(1):205-209.
[7]Zhang Y,Chen X,Bang H,et al.Dynamic Modeling and Simulation of a Dual-clutch Automated Lay-shaft Transmission[J].Journal of Mechanical Design,Transactions of the ASME,2005,127(2):302-307.
[8]黃席樾,陳勇,向長城,等.汽車交通事故混沌分析及預測方法[J].控制與決策,2009,22(10):1128-1130.
[9]李旭.拖拉機汽車運輸機組轉彎時必須要限速慢行[J].廣西農業機械化,1998,5(4):29-31.
[10]趙黨社,魏玲霞.鉸鏈式客車最小轉彎半徑和通道寬度的計算[J].客車技術與研究,2007,2(1):27-29.
[11]張彥會,廖抒華,劉婷婷,等.AMT自動換擋車輛行駛環境的模糊融合[J].拖拉機與農用運輸車,2009,36(6):66-68.
[12]高愛云,付主木,張文春.拖拉機電控機式自動變速器模糊換擋策略[J].農業機械學報,2006,37(11):34-37.
[13]孫衛靜.輕型貨車變速器設計平臺研發[D].武漢:武漢理工大學,2014.

