繁華商業(yè)區(qū)地下立體車庫車輛堆垛測控實(shí)現(xiàn)
2016-01-19 11:43:24孫洪宇王麗杰袁業(yè)剛丁欣
哈爾濱理工大學(xué)學(xué)報(bào) 2015年5期
孫洪宇++王麗杰++袁業(yè)剛++丁欣


摘要:給出面向繁華商業(yè)區(qū)地段的新型巷道堆垛式地下立體車庫實(shí)現(xiàn)方案,探討巷道堆垛式立體車庫堆垛機(jī)測控方法,研究車庫出入庫車輛尋址定位方法,基于STC89C52單片機(jī)實(shí)現(xiàn)了堆垛小車測控定位及光電尋址.給出巷道堆垛式立體車庫存取策略,采用叉梳式車輛存取方式實(shí)現(xiàn)車輛搬運(yùn),完成車庫搬運(yùn)機(jī)構(gòu)結(jié)構(gòu)設(shè)計(jì)并采用計(jì)算機(jī)輔助制圖軟件SolidWorks繪制相應(yīng)結(jié)構(gòu)圖,該研究成果對于實(shí)現(xiàn)繁華商業(yè)街快速停車、解決商業(yè)區(qū)停車難問題具有重要現(xiàn)實(shí)意義.
關(guān)鍵詞:商業(yè)區(qū);立體車庫;巷道堆垛式;堆垛機(jī);尋址定位
DOI:10.15938/j.jhust.2015.05.017
中圖分類號:TP273
文獻(xiàn)標(biāo)志碼:A
文章編號:1007-2683(2015)05-0085-06
0 引言
隨著社會經(jīng)濟(jì)的不斷飛速發(fā)展,私家車數(shù)量日趨增長.機(jī)動車保有量的增長與泊車位的緊缺之間的矛盾日益凸顯.針對傳統(tǒng)車庫車位少、費(fèi)朋高、空間利用率低等弊端,十二五期間,國家大力倡導(dǎo)建設(shè)現(xiàn)代化的立體停車庫,與之配套使用的立體車庫測控技術(shù)則成為該領(lǐng)域中科研人員急需提升及發(fā)展的重中之重.目前,國內(nèi)關(guān)于立體車庫與立體車庫測控系統(tǒng)的研究尚處于起步階段,行業(yè)內(nèi)沒有統(tǒng)一的技術(shù)標(biāo)準(zhǔn),多數(shù)產(chǎn)品靠引進(jìn)或效仿國外技術(shù)制造,技術(shù)水平低、價(jià)格高昂.同時(shí),由于缺少科研設(shè)計(jì)單位等的參與,立式停車測控技術(shù)研發(fā)能力嚴(yán)重不足,再加上政策不配套,造成了停車產(chǎn)業(yè)發(fā)展和管理的嚴(yán)重滯后.
上述問題的解決一方面需要國家給出政策,如盡快建立立體車庫行業(yè)運(yùn)行機(jī)制,運(yùn)用價(jià)格杠桿調(diào)高占路停車收費(fèi)標(biāo)準(zhǔn)、消除路邊停車現(xiàn)象,鼓勵按市場規(guī)則經(jīng)營車庫等,另一方面則需要鼓勵高校、科研單位大力開展立式車庫測控技術(shù)自主研發(fā),研究適合國情的且具有本土化優(yōu)勢的立體車庫測控系統(tǒng),解決立體車庫智能收費(fèi)、車輛存取識別、車位調(diào)度及行程設(shè)計(jì)、堆垛定位及測速、智能安防報(bào)警以及車輛超限超重檢測報(bào)警等系列關(guān)鍵技術(shù)問題.
本文研究適用于繁華商業(yè)區(qū)地段的新型巷道堆垛式地下立體車庫測控系統(tǒng),研究解決立式停車堆垛機(jī)堆垛尋址定位、行程控制、車輛存取策略等關(guān)鍵技術(shù)問題.課題研究對于實(shí)現(xiàn)解決立式車庫車輛自動堆垛具有重要意義.
1 方案與方法研究
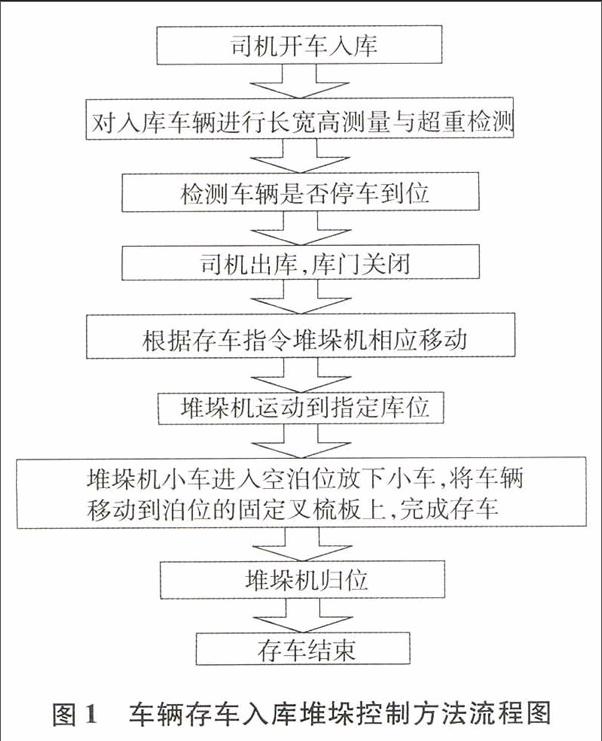
考慮到大型城市繁華商業(yè)區(qū)地段,車輛流動量大、可用空間有限、人員擁擠等特點(diǎn),研究中選擇巷道堆垛式立體車庫結(jié)構(gòu)型式,繁華商業(yè)區(qū)地下立體車庫研究主要圍繞車輛存取方法、入庫引導(dǎo)測控和堆垛機(jī)尋址定位測控三部分內(nèi)容展開.圖1給出車輛存車入庫堆垛控制方法流程圖.
1.1 方案設(shè)計(jì)
結(jié)合圖1所示存車流程說明車庫設(shè)計(jì)總體方案.巷道堆垛式立體車庫的測控主要通過入庫引導(dǎo)和堆垛機(jī)測控來實(shí)現(xiàn),堆垛機(jī)部分主要由提升搬移機(jī)構(gòu)和堆垛機(jī)小車測控機(jī)構(gòu)組成.
GB17907-1999《機(jī)械式停車設(shè)備通用安全要求》中,明確規(guī)定了立體車庫停車位的長、寬、高等信息.所以,研究中,在車庫入口處設(shè)置入庫引導(dǎo)系統(tǒng)完成對入庫車輛進(jìn)行長寬高三維尺寸和車重等檢測以及超限報(bào)警,以確定車輛是否符合該車庫車輛入庫要求.車輛入庫后,通過入庫引導(dǎo)提示系統(tǒng),提示司機(jī)將車停放到規(guī)定位置,司機(jī)下車,司機(jī)離開車庫后,庫門關(guān)閉,主控單片機(jī)系統(tǒng)啟動管理系統(tǒng),根據(jù)車庫車位實(shí)時(shí)監(jiān)測結(jié)果給出空閑車位信息,根據(jù)調(diào)度最優(yōu)策略計(jì)算確定停車泊位具體位置,并將控制信息通過無線通訊方式傳輸入堆垛機(jī)小車單片機(jī)控制系統(tǒng),開啟具體車位的尋址定位操作,
堆垛機(jī)小車單片機(jī)控制系統(tǒng)控制小車光電尋址,移動到規(guī)定的泊車位后,泊車位下方的堆垛機(jī)小車測控機(jī)構(gòu)控制提升搬移機(jī)構(gòu)中的移動叉梳板抬起車輛,同時(shí)堆垛機(jī)提升系統(tǒng)工作,使堆垛機(jī)小車垂直運(yùn)動,待提升系統(tǒng)穩(wěn)定后堆垛機(jī)水平移動.這樣就實(shí)現(xiàn)了車輛的升降平移的運(yùn)動,完成車輛入庫尋址,堆垛機(jī)小車進(jìn)入空泊車位時(shí),泊車位處光電測位開關(guān)監(jiān)控車輛停放泊車位是否超限,如果過位啟動光電報(bào)警,泊車位單片機(jī)控制子系統(tǒng)控制停車中斷并傳輸信息至小車控制單片機(jī)系統(tǒng)及主控單片機(jī)系統(tǒng),控制堆垛機(jī)小車進(jìn)行相應(yīng)調(diào)整處理.如果具體車位停車到位,則堆垛機(jī)小車控制放下移動叉梳板,把車輛移動到泊車位的固定叉梳板上,完成車輛的存入,
取車過程與存車過程相反.車庫框架的具體層數(shù)和每層容納泊車位數(shù)量由相應(yīng)建筑結(jié)構(gòu)具體設(shè)定.
1.2 車輛存取策略研究
巷道堆垛式立體車庫存取車輛可通過3種方式來實(shí)現(xiàn):
1)原地待命策略.堆垛機(jī)完成存取操作后停在原地等待下次操作.
2)存車優(yōu)先策略.當(dāng)堆垛機(jī)完成存取操作后回到車庫入口待命.
3)交叉存取策略.同時(shí)有幾輛車需要存取時(shí),對存取車輛進(jìn)行存車和取車分組,對兩組服務(wù)對象進(jìn)行存取車交叉服務(wù).
對于繁華商業(yè)區(qū)地下立體車庫而言,存取車輛的時(shí)間長短直接反映了設(shè)備的利用率和效率.車庫系統(tǒng)的存取車輛服務(wù)時(shí)間與車庫中的位置有關(guān),與車庫出入口近的車位服務(wù)時(shí)間較短,反之時(shí)間則較久.因此研究中選擇先近后遠(yuǎn),先低層后高層的車輛存取方案,考慮到車庫成本、繁華商業(yè)區(qū)擁堵實(shí)際情況等,最終確定存車優(yōu)先的存取策略.
2 結(jié)構(gòu)設(shè)計(jì)
2.1 結(jié)構(gòu)型式選擇
研究中,針對繁華商業(yè)區(qū)地段特點(diǎn),選擇地下巷道堆垛式結(jié)構(gòu)型式架構(gòu)車庫,車庫為三層,列數(shù)根據(jù)具體車庫空間而定,整體而言,具備下述特色優(yōu)勢:①成本低、結(jié)構(gòu)設(shè)計(jì)靈活.②具體實(shí)現(xiàn)安裝時(shí),既可以采用鋼結(jié)構(gòu),也可以采用鋼和混凝土的混合結(jié)構(gòu).③巷道堆垛機(jī)的存取方式易于實(shí)現(xiàn)自動化、智能化管理,系統(tǒng)靈活,安全性高.④適合解決繁華商業(yè)區(qū)地段車庫入口處空間及面積等有限、寸土寸金等關(guān)鍵問題,提高地下土地面積利用率.
2.2 存取方式設(shè)置
立體車庫存取車方式通常包括:三級滑叉式、鏈條傳動式和叉梳式,三級滑叉式和鏈條傳動式存取車方式中,每個(gè)停車位都有一個(gè)放置車輛的載車板,車輛的存取,實(shí)際上是通過對載車板的存取來實(shí)現(xiàn)的.每個(gè)車位都有一個(gè)載車板,因此,當(dāng)連續(xù)存車或連續(xù)取車時(shí),將會存在一個(gè)取空載車板或者存空載車板的空行程,這樣就增加了存取車的時(shí)間,影響了存取車效率,考慮到存取車時(shí)間是一個(gè)影響立體車庫使用的重要因素,而移動叉梳和搬運(yùn)機(jī)構(gòu)的連接系統(tǒng)結(jié)構(gòu)簡單,傳動部件少,運(yùn)行效率高,所以研究中選擇叉梳式車輛存取方式.
移動叉梳結(jié)構(gòu)設(shè)計(jì)如圖2所示.
圖2中移動叉梳長度為6000mm,前后輪支撐(叉齒)長度為550mm.堆垛機(jī)小車上設(shè)置移動叉梳,而每個(gè)泊車位上設(shè)置與之相互交錯(cuò)的固定叉梳.堆垛機(jī)小車到達(dá)指定位置后,通過堆垛機(jī)小車上的液壓缸移動叉梳的升、降運(yùn)動,實(shí)現(xiàn)汽車的存取,研究中采用計(jì)算機(jī)輔助制圖軟件SolidWorks繪制實(shí)現(xiàn)相應(yīng)結(jié)構(gòu).
2.3 泊車位與固定叉梳
根據(jù)GB17907-1999《機(jī)械式停車設(shè)備通用安全要求》規(guī)定,研究確定車庫所能容納車輛最大參數(shù):車長5000mm,車寬1900mm,車高l600mm,車輛軸距3000mm,車重2000kg.由此設(shè)計(jì)泊車位規(guī)格如下:庫長7000mm,庫寬2500mm,庫高1800mm.泊車位與固定叉梳結(jié)構(gòu)設(shè)計(jì)如圖3所示.
為了實(shí)現(xiàn)前述車輛存取方案,車庫結(jié)構(gòu)設(shè)計(jì)時(shí)泊車位采用對稱設(shè)計(jì),中間留有堆垛小車行走的空間并且下方焊有小車行走軌道,方便堆垛機(jī)小車的行走,泊車位上方的固定又梳與上文介紹的移動又梳齒以相互交錯(cuò)的方式進(jìn)行齒條嚙合.
2.4 堆垛機(jī)小車結(jié)構(gòu)設(shè)計(jì)
堆垛機(jī)小車由移動叉梳、液壓缸、堆垛機(jī)行走小車組成,如圖4所示.
堆垛機(jī)小車采用了對稱結(jié)構(gòu),移動叉梳板由4個(gè)液壓缸控制其升降,存車時(shí),移動叉梳板升到最高位置,同時(shí)堆垛機(jī)小車沿著軌道進(jìn)入泊車位下方,其叉齒與固定叉梳板上的叉齒錯(cuò)開,液壓缸驅(qū)動移動叉梳板下降,使車輛從移動叉梳板向固定又梳板上轉(zhuǎn)移,驅(qū)動堆垛機(jī)小車向堆垛機(jī)移動,完成存車過程,取車時(shí)各系統(tǒng)的運(yùn)作與存車相反.
2.5 提升搬移機(jī)構(gòu)
提升搬移機(jī)構(gòu)采用框架結(jié)構(gòu),主要包括行車輪、拖車盤和鋼筋框架.拖車盤的升降由鏈傳動完成,提升鏈提升拖車盤的四角作垂直運(yùn)動,由電動機(jī)提供動力,經(jīng)減速器減速后,傳動到驅(qū)動輪,驅(qū)動輪帶動提升鏈?zhǔn)固嵘到y(tǒng)的拖車盤上下移動,實(shí)現(xiàn)運(yùn)送車輛的目的,存車時(shí),提升機(jī)沿巷道水平移動,拖車板垂直移動共同完成對準(zhǔn)泊車位的運(yùn)動,堆垛機(jī)小車沿著軌道進(jìn)入泊車位,從而完成存取車的三維運(yùn)動.
3 堆垛機(jī)測控系統(tǒng)設(shè)計(jì)
車輛存取尋址定位研究中,設(shè)計(jì)堆垛機(jī)水平移動與垂直移動測量定位方式相同.
小車水平定位由紅外檢測模塊、單片機(jī)控制系統(tǒng)、電源模塊、電機(jī)驅(qū)動模塊、紅外遙控模塊組成,其組成框圖如圖5所示.
小車水平定位過程中:
1)首先把車庫墻體涂成白色,再在每個(gè)泊車位的中間涂上寬為200mm的黑線.
2)車輛進(jìn)入堆垛機(jī)司機(jī)下車后,通過紅外發(fā)射器發(fā)送給單片機(jī)一個(gè)數(shù)字(即為車輛水平方向?qū)⒁2吹膸煳惶枺J(rèn)堆垛機(jī)起始由最左端0號泊車位,號數(shù)從左到右依次遞增).
3)小車每經(jīng)過一次黑線,紅外線就會返回給單片機(jī)一次中斷,當(dāng)中斷次數(shù)與紅外發(fā)射器所給數(shù)字相同時(shí),即為所要存取的泊車位,從而完成定位尋址.
3.1 堆垛機(jī)小車單片機(jī)控制系統(tǒng)
目前控制系統(tǒng)中主要運(yùn)用的控制單元為單片機(jī)和PLC兩種.單片機(jī)具有結(jié)構(gòu)簡單、使用方便、價(jià)格便宜等優(yōu)點(diǎn).所以堆垛機(jī)小車控制系統(tǒng)采用STC89C52單片機(jī)作為核心控制單元.
STC89C52是STC公司生產(chǎn)的一種低功耗、高性能CMOS8位微控制器,具有8k的系統(tǒng)可編程Flash存儲器,運(yùn)算速度快等優(yōu)點(diǎn),堆垛機(jī)小車單片機(jī)控制系統(tǒng)主要包括單片機(jī)控制芯片、電源電路、復(fù)位電路、時(shí)鐘電路等,控制系統(tǒng)原理圖見圖6.
3.2 紅外檢測模塊
采用反射式光電開關(guān)LTH1550作為傳感信息采集裝置,其測試電路設(shè)計(jì)如圖7所示,
紅外發(fā)射管發(fā)射光線到墻面,紅外光遇到白底就會發(fā)生漫反射,接收管接收到發(fā)射光,經(jīng)施密特觸發(fā)器整形后輸出低電平;當(dāng)紅外線遇到黑色線時(shí)就會被吸收,接收管沒有接收到反射光,經(jīng)施密特觸發(fā)器整形后輸出高電平,同時(shí)反饋給單片機(jī)一個(gè)中斷信號.
3.3 紅外遙控模塊
發(fā)射部分與接收部分構(gòu)成了利用紅外線原理的遙控模塊.由紅外遙控器上的紅外發(fā)射電路發(fā)射紅外信號,單片機(jī)通過中斷來對紅外接收頭接收到的載波信號進(jìn)行解碼來確定是哪個(gè)按鍵被按下.
紅外遙控器采用芯片NEC μPD6121實(shí)現(xiàn),使用NEC碼型.NEC協(xié)議根據(jù)脈沖時(shí)間長短解碼.每個(gè)脈沖為560μs長的38kHz載波(約21個(gè)載波周期).邏輯“1”脈沖時(shí)間為2.25ms,邏輯“0”脈沖時(shí)間為1.125ms.單片機(jī)通過計(jì)算相鄰兩個(gè)中斷的間隔時(shí)間來判斷信息位是“0”或“1”.如果單片機(jī)計(jì)算出的兩次信息位的時(shí)間差值是1.125 ms說明接收到的為“0”,如果計(jì)算的兩次時(shí)間差值是2.25ms則為“I”,信號碼定義如圖8.
協(xié)議的一幀編碼由一段引導(dǎo)碼,8位用于區(qū)分用戶的不同類型的遙控裝置的用戶碼和用于遙控器面板上的不同按鍵區(qū)分的8位數(shù)據(jù)碼共同組成.并且完整兩次發(fā)射,以提高應(yīng)用的可靠性.如圖9為NEC紅外遙控器編碼的結(jié)構(gòu)圖.
程序運(yùn)行后,單片機(jī)首先要判斷是否接收到脈沖,編碼“0”和“1”擁有不同的脈沖時(shí)間,所以單片機(jī)一旦識別到脈沖信號,就利用計(jì)數(shù)器計(jì)算脈沖的長度,確定接收的是哪個(gè)編碼.如果識別到的是頭脈沖,單片機(jī)不做任何處理,每當(dāng)識別到一個(gè)有效的信
號時(shí),計(jì)數(shù)器的數(shù)值增加1,然后分析工作的完成情況,如果沒完成,則直接結(jié)束程序,如果完成則進(jìn)行下一步工作校驗(yàn)信號是否正確,如果校驗(yàn)錯(cuò)誤,則直接結(jié)束程序,如果校驗(yàn)正確,則將鍵值進(jìn)行保存并發(fā)送信息量,最后結(jié)束程序.圖10是遙控解碼程序的流程圖,
為了提高運(yùn)行可靠性,系統(tǒng)設(shè)計(jì)雙重校驗(yàn)方法實(shí)現(xiàn)遙控方法.首先求出接收數(shù)據(jù)及其補(bǔ)碼的和,若不為OxFF,則說明數(shù)據(jù)接收出現(xiàn)了錯(cuò)誤,若為OxFF就說明接收了正確的數(shù)據(jù).得到這個(gè)和之后,接下來使用這個(gè)用戶碼來濾除別的遙控器帶來的干擾,從而確定了遙控器.這種雙重校驗(yàn)的機(jī)制,有效的排除了外界的干擾,確保了接收編碼的正確性.
3.4 電源模塊與電機(jī)驅(qū)動模塊
研究中采用L7805、L7806、L7812芯片設(shè)計(jì)電源電路,原理圖如圖11所示.
圖11電路輸出分別為SV、6V和12V,系統(tǒng)運(yùn)行時(shí)可為單片機(jī)、紅外探測模塊、電機(jī)驅(qū)動模塊和步進(jìn)電機(jī)供電,由于單片機(jī)輸出的步進(jìn)信號電壓偏低,而且負(fù)載能力不足,不能用來直接驅(qū)動電機(jī),L298N驅(qū)動芯片是性能優(yōu)越的小型直流電機(jī)驅(qū)動芯片之一,在4~6V的電壓下,可以提供2A的驅(qū)動電流,符合電機(jī)驅(qū)動的要求,因此需要使用驅(qū)動芯片L298N,單片機(jī)輸出的信號,經(jīng)過L298N實(shí)現(xiàn)功率的放大,驅(qū)動電機(jī)工作.
4 試驗(yàn)及結(jié)果
研究中設(shè)計(jì)小型模擬堆垛機(jī)測試樣機(jī),采用VC++編程實(shí)現(xiàn)相應(yīng)測量控制環(huán)節(jié).在模擬黑白線軌道中進(jìn)行整體的測試.模擬堆垛機(jī)實(shí)體圖如圖12所示.
經(jīng)過50次反復(fù)功能驗(yàn)證,模擬堆垛機(jī)小車完全能夠?qū)崿F(xiàn)預(yù)期的測控定位要求.并且定位誤差小,可以滿足設(shè)計(jì)要求.
5 結(jié)語
論文設(shè)計(jì)繁華商業(yè)區(qū)地下巷道堆垛式立體車庫,給出其結(jié)構(gòu)實(shí)現(xiàn)方案和存取車策略方法,完成堆垛機(jī)測控系統(tǒng)設(shè)計(jì)調(diào)試,并采用SolidWorks軟件完成車庫結(jié)構(gòu)設(shè)計(jì)及零件圖、裝配圖繪制,論文研究方案實(shí)用性強(qiáng),充分利用有限空間,定位準(zhǔn)確,容易實(shí)現(xiàn).能夠滿足內(nèi)地市場對立體車庫的實(shí)用化低成本要求.