多灰度級格雷碼三維測量方法
2016-01-19 11:48:02孟凡辰陳德運王莉莉于雙于
哈爾濱理工大學學報 2015年5期
孟凡辰++陳德運++王莉莉++于雙++于曉洋

摘要:針對兩灰度級格雷碼三維測量方法存在編碼圖案多、測量效率低的問題,研究多灰度級格雷碼的三維測量方法,與兩灰度級格雷碼方法相比,該方法采用多個灰度級形成編碼圖案,同等條件下能有效減少編碼圖案數量、明顯提高測量效率.通過m幅Ⅳ(N∈Z,N≥3)灰度級格雷碼圖案將被測空間分為Nm個區域,編碼圖案中的條紋平行、寬度相同.根據格雷碼編碼圖像將,v灰度級格雷碼轉換為Ⅳ進制數,進而轉化為十進制數,從而得到編碼圖像中每個像素點在編碼圖案中所對應的區域序號,并結合光學三角法的數學模型得到被測表面的三維坐標,實驗結果表明,該方法對深度距離為850~1150mm平面的方差小于2 mm2,測量誤差小于2mm,最大絕對誤差小于5mm,該方法適用于具有復雜和不連續表面的被測對象,測量結果能較好地體現被測表面的細節特征,
關鍵詞:三維測量;結構光;兩灰度級格雷碼;多灰度級格雷碼;格雷碼多值化
DOI: 10.15938/j.jhust.2015.05.019
中圖分類號:TP391
文獻標志碼:A
文章編號:1007-2683(2015)05-0097-06
0 引言
視覺三維測量技術是三維測量領域的重點發展方向,其中結構光法作為一種主動式三維測量方法具有成本低、分辨率高和速度快的優勢并最具實用性.時間編碼結構光三維測量方法具有高準確度、高分辨率等優點,具有廣闊的應用前景,目前,時間編碼主要分為數字時間編碼和模擬時間編碼兩類,數字時間編碼與模擬時間編碼相比,測量準確率較低,但其抗干擾能力較強.數字時間編碼主要分為兩灰度級碼和兩灰度級格雷碼,傳統的數字時間編碼結構光需要一定數量的編碼圖案才能達到較高的測量準確度和采樣密度,本文針對被測物處于靜態的場合,研究編碼圖案較少的多灰度級格雷碼三維測量方法,該方法與兩灰度級格雷碼方法相比,保留了高抗干擾能力的優點,同等條件下減少了編碼圖案的數量,明顯提高了測量效率.
1 三維測量系統組成及測量原理
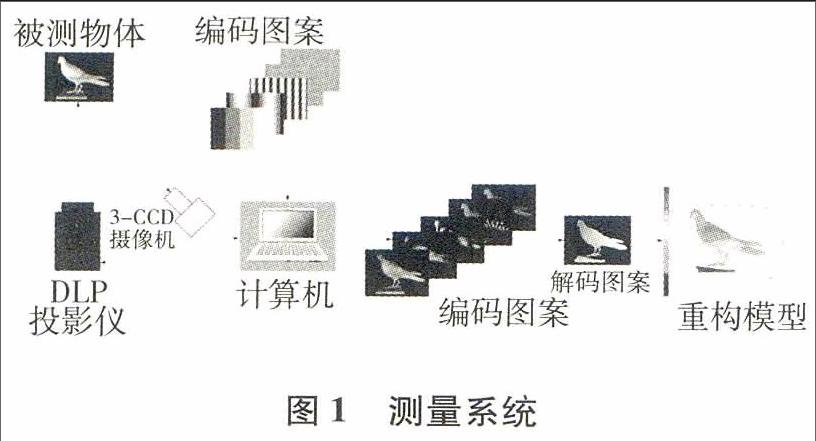
基于本文方法的三維測量系統如圖1所示,主要由投影儀、數碼攝像機及計算機組成.通過計算機生成編碼圖案并控制投影儀依次將編碼圖案投射到被測物表面上;投射在被測物表面上的編碼圖案受其表面形狀調制而改變;計算機控制數碼攝像機采集編碼圖像并進行解碼,然后根據攝像機和投影儀之間的位置姿態參數并通過光學三角法獲得被測表面的三維信息,
三維測量系統的測量原理如圖2所示.圖2中,0為投影儀的鏡頭中心,M為攝像機鏡頭中心,基線OM=B;P為被測表面上的一點,其位于物理坐標系XYZO內,點P0為物點P在像坐標系X0Z0Y0O0中的像平面X0Z0Y0內的像點,面XOZ共面,光線OP在XOZ面上投影OP'與OX軸的夾角為a,稱之為投射角,點P'為物點P在XOZ面上的投影點,攝像機鏡頭光軸X0Z0與基線OM之間的夾角為Po,攝像機的鏡頭焦距OoM=f,光線MP與XOZ面的夾角為γ,β盧為光線MP在XOZ面上的投影MP'與基線OM之間的夾角,點p'0為像點P0在光軸O0X0上的投影點.攝像機在水平方向的視場角為2β1,在垂直方向的視場角為2β2,攝像機像面水平方向Xo上的像素序號記為n,總像素數為2N,攝像機像面在垂直方向Y0上的像素序號記為m,總像素數為2M.
根據光學三角法,由圖2可推導出被測點P的三維坐標計算公式為式中:P0、β1、β2、B為預先標定的常數;n、m、N、M由編碼圖像直接得到;投射角a需要根據編碼圖像進行解碼獲得.
2 多灰度級格雷碼的編解碼原理
多灰度級格雷碼在兩灰度級格雷碼的基礎上,通過增加灰度級數量來進行編碼從而減少投射圖案的數量,提高編碼效率.該方法通過m幅Ⅳ(NEZ,N≥3)灰度級格雷碼圖案將被測空間分為NM個區域,編碼圖案中的條紋平行、寬度相同,下面以四灰度級五位格雷碼為例說明多灰度級格雷碼條紋編解碼原理,由投影儀向被測表面按時序投射如圖3所示的5幅編碼圖案,通過亮、淺灰、深灰、暗四灰度級將被測空間分為45=1024個區域.其中亮區域對應碼值3,淺灰區域對應碼值2,深灰區域對應碼值1,暗區域對應碼值0,0、1、2、3所對應的灰度值分別為0、85、170、255.四灰度級五位格雷碼的編碼規則如圖4所示.解碼時,將編碼圖像上的某個像素點作與其空間被測點相對應;將該像素點中心作為圖像采樣點位置,該像素點在5幅編碼圖像中的碼值按時間序列組合,得到該像素點的區域編碼值,由此確定該像素點在編碼圖案上的所在區域,進而建立空間被測點、編碼圖像像點和編碼圖案像點的對應關系.
圖4 四灰度級五位格雷碼編碼規則
圖3中某個空間被測點P對應于編碼圖像上的紅色像素點,在5幅編碼圖像中的碼值分別為“0”、“0”、“0”、“0”、“0”、“3”,則該點的區域編碼值為“00003”,首先將格雷碼轉換為四進制碼“00003”,進而轉換為十進制碼,得到該像素點的區域序號k=3,K為整數.
多灰度級格雷碼屬于一種Ⅳ進制碼,任意兩相鄰碼值之間只有1位不同,反映到解碼過程中,即任意圖像采樣點在各幅編碼圖像中最多只有一次處于條紋邊緣,因此其碼值最多只有1位被誤判,在解碼過程中需通過式(2)將多灰度級格雷碼轉換成Ⅳ進制碼,其中G'=G'1.G'2 G'3 -G'm表示Ⅳ灰度級格雷編碼;B'=B'1,B'2,B'3- - - B'm表示其對應的Ⅳ進制編碼.根據式(3)將獲得的Ⅳ進制碼轉換為十進制碼,即采樣點在編碼圖案中所對應的區域序號k.
若要將被測空間分為1024個區域,采用兩灰度級格雷碼需要10幅編碼圖案,而采用四灰度級格雷碼需要5幅編碼圖案,相對于兩灰度級格雷碼,多灰度級格雷碼減少了編碼圖案幅數.m幅N灰度級格雷碼編碼圖案可將被測空間分為Nm(N∈Z,N≥3)個區域,m幅兩灰度級格雷碼編碼圖案可將被測空間分為2m個區域,Nm>2m,因此,在編碼圖案相同的情況下,相對于兩灰度級格雷碼,多灰度級格雷碼具有較高的測量分辨率.
3 投射角的求取
準確獲得投射角α是光學三角法的關鍵,即將多灰度級格雷碼解碼值轉換為對應的投射角,投影儀的投射中線與光軸OX的夾角為α0,投影儀的水平視場角為2α1,m幅多灰度級格雷碼編碼圖案用N灰度級將投射空間劃分為,Nm個區域,格雷碼空間范圍為[0,Nm0-α1,α0+α1).圖5為四灰度級兩位格雷碼解碼值與投射角的轉換關系,兩幅編碼圖案用四灰度將投射空間劃分為42=16個區域,格雷碼空間范圍為[0,15].式為多灰度級格雷碼解碼值所對應的投射角求取公式中:Ⅳ為格雷碼的灰度級數;m為格雷碼編碼圖案的數量;k為格雷碼解碼值.根據式(6)可得四灰度級五位格雷碼解碼值所對應的投射角求取公式為
4 多灰度級格雷碼多值化
4.1 格雷碼編碼圖像歸一化
結構光測量系統投射的編碼圖案和拍攝的編碼圖像只包含灰度信息,復雜的測量環境,被測表面的反射率不均勻,環境光對被測表面的照射不均勻以及被測表面形狀的不規則等因素都對會所拍攝的編碼圖像中各像素的灰度值進行調制,致使各像素的灰度值的變化范圍不一致,因此,在對編碼圖像進行多值化之前,需要對編碼圖像進行歸一化來減小外部因素對編碼圖像中各像素的灰度值的調制影響,
下面以四灰度級格雷碼為例對編碼圖像歸一化進行說明,在投射四灰度級格雷碼編碼圖案的基礎上,再附加投射“全亮”、“淺灰”、“深灰”、“全暗”4幅圖案,“全亮”即編碼圖案中各像素點為白色(灰度值為255);“淺灰”即編碼圖案中各像素點為淺灰色(灰度值為170),“深灰”即編碼圖案中各像素點為深灰色(灰度值為85),“全暗”即編碼圖案中各像素點為黑色(灰度值為0).利用式(8)對四灰度級格雷碼編碼圖像進行歸一化來修正外界因素對編碼圖像中各像素的灰度值的影響,即
式中:IK(i,j)、IH(i,j)、IL(i,j)分別為格雷碼編碼圖像、“全亮”、“全暗”圖像中像素點(i,j)的灰度值;Jk(i,j)為格雷碼編碼圖像歸一化后像素點(i,j)的強度值,Jk(i,j)在[0,1]范圍內變化,
除了對格雷碼編碼圖像進行歸一化之外,還需要通過式(9)對“淺灰”、“深灰”圖案進行歸一化,即式中:IM1(i,j)、IM2(i,j)分別為“深灰”、“淺灰”圖像中像素點(i,j)的灰度值;J'M(i,j)、J"M(i,j)分別為“深灰”、“淺灰”圖像歸一化后像素點(i,j)的強度值,J'M(i,j)、J"M(i,j)均在[0,1]范圍內變化,且J'M(i,j)
4.2 格雷碼編碼圖像多值化閾值的選取
編碼圖像多值化是在將歸一化圖像轉換成多值圖像,N灰度級格雷碼編碼圖像需要N-1個閾值來進行多值化.下面以四灰度級格雷碼為例對編碼圖像多值化進行說明,編碼圖像四值化是在將歸一化圖像轉換成暗、深灰、淺灰、亮四值圖像.格雷碼編碼圖像四值化采用局部閾值法,即將“深灰”圖像歸一化后的像素點的強度值與零取平均作為該像素點的閾值1,將“深灰”、“淺灰”2幅圖像歸一化后的同一像素點的強度值取平均作為該像素點的閾值2,將“淺灰”圖像歸一化后的像素點的強度值與1取平均作為該像素點的閾值3,根據式(10)對編碼圖像進行四值化,即
5 測量實驗與結果分析
m幅多灰度級格雷碼編碼圖案用Ⅳ灰度級將投射空間劃分為nm個區域,當nm為固定值時,多灰度級格雷碼的灰度級數Ⅳ越大,編碼圖案數量m越小,同時,隨著多灰度級格雷碼的灰度級數越多,抗干擾能力越低;對編碼圖像進行解碼時圖像采樣點灰度級判斷次數增多、判斷難度增大,易帶來解碼誤差,影響測量準確度.綜合考慮,本文采用四灰度級五位格雷碼進行實驗.
測量系統實驗裝置由DLP投影儀(AcerH7531D)、3-CCD攝像機(HITACHI HV-F22)以及計算機組成,實驗中,投影儀水平視場角2a,設置為40°,編碼圖案的分辨率設置為1024×768攝像機的水平視場角2β1和垂直視場角2β2分別設置為40°和30.651°,攝像機的鏡頭焦距f設置為49.455mm,攝像機的分辨率設置為1360x1024,投影儀的鏡頭中心與攝像機鏡頭中心之間的距離B設置為400mm,攝像機鏡頭光軸與X軸之間的夾角Po設置為70°.
本文針對尺寸為200×300mm2的標準平面進行測量實驗,將標準平面垂直于深度方向放置于一維移動臺上,一維移動臺沿深度方向從850mm位置處開始依次移動75mm直到1150mm位置處,每個位置處進行一次測量,標準平面測量結果如表1所示,,其中,標準深度值為標準平面的深度值,平均測量值為被測平面上所有采樣點的深度測量值的平均值,平均測量誤差為平均測量值與其標準深度之差,方差為被測平面上所有采樣點的深度測量值與其測量平均值差值的平方和的均值,測量誤差為平均測量誤差平方與其方差之和的平方根,最大絕對誤差為所有采樣點的深度測量值與平均測量值之差的絕對值的最大值.圖6為采用四灰度級格雷碼測量方法的深度值為1000mm的標準平面的每個采樣點的深度測量值與其標準深度的差.
由表l及圖6可知,在850~1150mm深度測量范圍內,采用四灰度級五位格雷碼測量標準平面的方差小于2.5mm2,測量誤差小于2mm,最大絕對誤差小于5mm該方法不存在粗大誤差
為了進一步驗證本文方法,采用四灰度級五位格雷碼對表面復雜的花瓶進行了測量實驗,圖7(a)為被測花瓶,圖7(b)為投射了四灰度級格雷碼編碼圖案的圖像,圖7(c)為被測花瓶的測量結果.
通過對比圖7(a)和圖7(c)可知,根據測量結果重構的花瓶的三維表面光滑、細膩,準確地反映r被測表面的三維形貌,較好地體現了被測表面的細節特征,具有良好的視覺效果.實驗結果驗證了本文方法的有效性和可行性.
6 結論
本文研究了多灰度級格雷碼三維測量方法,組建了測量系統,闡述了該方法的編解碼原理,陔方法與兩灰度級格雷碼三維測量方法相比,在相同測量分辨率的情況下,采用多個灰度級形成編碼圖案,有效減少了編碼圖案的數量,明顯提高了測量效率,針對多灰度級格雷碼解碼時的多值化問題,給出了多灰度級格雷碼多值化的方法.采用四灰度級五位格雷碼對標準平面和表面復雜的花瓶進行了測量實驗,實驗結果表明,對深度距離為850~1150mm標準平面的方差小于2mm2,測量誤差小于2mm,最大絕對誤差小于5mm,對表面復雜的花瓶的測量結果較好地體現了被測表面的細節特征,驗證了本文方法的有效性和可行性.需要值得注意的是,當格雷碼的灰度級數Ⅳ較大時,該方法的抗干擾能力降低,對編碼圖像進行解碼時圖像采樣點灰度級判斷次數增多、判斷難度增大,易帶來解碼誤差,影響測量準確度.如果該問題發生時,可以應用更好的硬件系統來解決此問題,