帶顯著性區域約束的高效視頻全景拼接方法
2016-01-22 01:05:09范菁,吳佳敏,葉陽等
浙江工業大學學報 2015年5期
帶顯著性區域約束的高效視頻全景拼接方法
范菁,吳佳敏,葉陽,吳冬艷,王浩
(浙江工業大學 計算機科學與技術學院,浙江 杭州 310023)
摘要:傳統的基于流形的全景拼接技術在處理包含局部運動的視頻時,存在不能保留特定關鍵區域的內容、表達視頻運動信息的能力較差以及實現速度較慢的問題.針對上述問題,提出了一種帶顯著性區域約束的高效視頻全景拼接方法,該方法在基于流形的視頻拼接的基礎上考慮圖像的特征點,通過設定顯著性區域,生成關鍵幀帶約束的全景圖;然后對關鍵幀全景圖進行對齊及融合,構建運動全景圖;并采用基于CUDA的并行計算方法進行算法加速.實驗結果表明:該方法不僅可以在全景圖中保留特定對象某一時刻的具體形態,而且可以保留運動對象多個運動形態,并且有較快的拼接速度.
關鍵詞:視頻拼接;流形;特征點;全景圖;對象約束;CUDA技術
收稿日期:2015-04-15
基金項目:浙江省重大科技專項項目(2013C01112,2012C01SA160034);杭州市重大科技創新專項(20132011A16)
作者簡介:范菁(1969—),女,浙江杭州人,教授,博士生導師,研究方向為虛擬現實與軟件中間件等,E-mail:fanjing@zjut.edu.cn.
中圖分類號:TP391
文獻標志碼:A
文章編號:1006-4303(2015)05-0479-08
Abstract:The traditional panorama stitching technique based on manifold can’t retain the contents of particular key areas in videos. The ability to express the motion information of video is poor and the speed is slow. In order to solve these problems, an efficient panoramic stitching method with significant region constraint is presented. Based on the manifold video stitching and the image feature points, this method will set significant area to generate the panorama with constraint for key frames firstly. Then the panoramas in the key frames are aligned and fused to obtain the motion panorama. The CUDA parallel computing is used to speed up. The experimental results showed that the proposed method can not only retain the specific form of specific object at a certain moment, but also can keep multiple movement patterns of moving objects in the panorama. It can effectively improve the speed of image stitching.
Keywords:video stitching; manifold; feature points; panorama; object constraint; CUDA
An efficient panoramic stitching method with significant region constraint
FAN Jing, WU Jiamin, YE Yang, WU Dongyan, WANG Hao
(College of Computer Science and Technology, Zhejiang University of Technology, Hangzhou 310023, China)
視頻作為影視娛樂、信息傳播或場景監控的載體,已在日常生活和工業應用中發揮重要的作用.隨著視頻資源數量的增加和計算機技術的發展,人們對視頻分析及處理的要求越來越高[1].視頻全景拼接技術通過對持續時間較長的視頻提供簡短的概括性摘要,幫助用戶快速了解視頻的大致內容,提高了分析和處理視頻信息的效率.但是在處理包含運動對象的視頻時,由于運動對象在視頻中的每個時刻位置和形態都不同,簡單的全景拼接技術只是將一段視頻拼接成一幅涵蓋場景全貌的高分辨率圖像,無法保證運動對象的完整性,更無法滿足在全景圖構造時保留特定對象某一時刻形態的需求.
目前視頻領域比較經典并被廣泛使用的方法是基于流形思想的拼接方法[2],該方法通過在時空立體空間下的流形投影,以像素列為基本單位進行拼接操作;但是此算法要求視頻幀之間存在對齊關系,只適用于內容為靜態場景的視頻對象.為了適應運動視頻的特性,Zomet等[3-4]針對基礎算法要借助攝像機位置的改變來合成全景圖像的缺點,提出一種適用于多種攝像機運動的通用方法,但是影響了算法速度.Rav-acha等[5]針對隨機運動的視頻引入時空空間概念,但是無法處理具有結構性運動的視頻.Wexler等[6]則提出了一種較為完整的基于時空場景的流行拼接算法,不需要對像素列作對齊操作,也允許視頻場景中包含局部運動,但是其合成的全景圖并不包含視頻詳細內容,而且處理速度也由于應用Dijkstra算法而減慢.張樹江等[7]改進了像素列間距離的定義,提出了一種改進的基于流形的全景圖繪制方法,可以構建更完整詳細的全景圖,但同時也增加了計算復雜度.Hu等[8]針對實時交通監控視頻,采用基于流形的圖形拼接的算法并改進像素列之間的距離計算,但是算法的適用場景較局限.郭李云等[9]則在場景流形的拼接算法中對長視頻采用分段處理的方式,雖然該方法能較快得到質量較高的全景圖,但沒有考慮運動視頻全景圖的特殊需求.綜上所述,基于流形思想的視頻拼接技術已經有了較深入的研究,但是運動視頻全景圖的構建效果及算法處理速度還有待提高.因此,針對以上問題,筆者提出了一種帶顯著性區域約束的高效視頻全景拼接方法,該方法在基于流形的視頻拼接的基礎上進行視頻顯著性區域的劃分,形成對象約束的全景圖,然后通過對關鍵幀的全景圖進行圖像融合,形成運動全景圖,最終實現了多運動形態顯示和特定對象特定時刻的具體形態展現.同時,該方法采用CUDA并行計算,顯著提升了拼接速度.
1帶顯著性區域約束的全景拼接技術
視頻是圖像序列的集合,參照基于時空場景的流行拼接算法[6],我們將一段視頻的圖像序列投射于三維坐標系中,形成一個時空立體空間(圖1).此空間中,X軸為圖像的寬度,Y軸為圖像的高度,T軸是視頻圖像的時間方向,因此單張視頻圖像即可視為一個二維平面(X—Y),全部圖像可以對齊到時間T軸.

圖1 視頻立體空間 Fig.1 Video stereo space

若要從視頻圖像序列中抽象出一幅場景過渡自然、無拼接痕跡的新圖像,就需要從大量的像素列集合中挑選出適合的拼接像素,而如何挑選像素就是一個尋找貫穿整個立體空間最佳流形切面(Y—T平面)的問題,在時間軸上獲得的該二維剖面的投影就是視頻的全景圖像,即圖1中邊緣線所標出的二維剖面.因此,需要確定流形切面的最優性以及尋找這個最佳剖面.
1.1功能函數

(1)

(2)
式(2)可簡化為
(3)
所以,最優路徑中各像素列之間的總和可以定義為
(4)
1.2構圖過程


圖2 相鄰結點的取值范圍 Fig.2 Value range for nearby node

(5)
(B-B′)2)
(6)
求解最短路徑采用的是Dijkstra算法.經典的Dijkstra算法主要用來求解單源、無負權的最短路徑,其時間復雜度為O(V×V+E),V為結點數,E為邊數.假定源節點為s,不包括源結點的結點集合為V.搜索算法的基本思想是:先設定源節點到V中所有結點的長度為無窮大,即Initial過程;然后每次從集合V中取出當前情況下到源節點s的最短結點u,即ExtractMin過程;最后對u的相關邊進行松弛更新,即Relax過程[10].
1.3對象約束的全景拼接
對于不存在局部運動的視頻,每一幀圖像中顯著對象本身不會發生變化,因此利用功能函數及構圖過程的思路尋找到時空立體空間的下一條最優路徑就可以實現簡單的全景圖拼接;但是,若視頻存在局部運動的對象,根據以上方法則無法在全景圖中包含運動對象的某一刻形態.針對以上問題,考慮存在局部運動的視頻全景拼接,提出一種對象約束的全景拼接思想.
由于存在局部運動的對象是肉眼馬上能感知到的,所以我們對視頻幀的重要度定義可以增加一個顯著性判定標準:是否存在運動的對象,包含運動對象的區域可以定義為視頻幀的顯著性區域.然后,用戶指定全景圖中包含哪一幀的顯著性區域,通過這種對象約束生成帶約束的全景圖.
在獲取顯著性區域的過程中,首先采用光流法[8]來提取視頻中的運動對象.光流法能實現復雜運動目標的檢測和跟蹤,而且克服光亮度變化的影響[11].在得到每幀圖像的光流場信息后,把該運動信息按式(7)轉換成光流信息可視化圖.
(7)
其中:vx為x方向的速度;vy為y方向的速度.
對光流信息可視化圖進行二值化和形態學操作,找出圖中灰度值出現0值的最左邊的像素和最右邊的像素,并對其x軸上的位置進行記錄:左邊位置記為左邊界left_x,右邊位置設為右邊界right_x.最后,將left_x~right_x區域范圍內的圖像置為顯著性區域;圖3中框標記為視頻圖像的顯著性區域.

圖3 視頻圖像顯著性區域 Fig.3 The significant area of a video image
從左邊界left到右邊界right的區域中的每一列像素可作為帶約束的最短路徑中的必經結點.該區域中的所有必經結點構成一段必經路徑.從源節點到目標結點的最終路徑中,需要包含這一段路徑.那么最終的最短路徑可以分成3部分:1) 從源結點到left的最短路徑;2) 必經路徑;3) 從right到目標結點的最短路徑.這三部分最短路徑組成的路徑,即為符合實際情況的最短路徑,公式可定義為
Pmin=P(s,l)+P(l,r)+P(r,f)
(8)
其中:P表示路徑;Pmin為最終的最短路徑;s為源節點;l為左邊界;r為右邊界;f為目標結點.
根據以上思路分別對兩段運動視頻mashu.avi和jieli.avi進行實驗,實驗結果如圖4,5所示.圖4(a)和圖5(a)分別為兩段視頻中的部分原始幀;圖4(b)和圖5(b)為不帶約束的視頻全景圖拼接圖;圖4(c)為保留圖4(a)中mashu.avi視頻序列第4張圖片中馬的動作生成的帶約束的全景拼接圖;圖5(c)為保留jieli.avi視頻序列的第1張圖片中運動員的動作生成的帶約束的全景拼接圖.

圖4 mashu.avi視頻的拼接結果 Fig.4 Video panorama stitching results of mashu.avi

圖5 jieli.avi視頻的拼接結果 Fig.5 Video panorama stitching results of jieli.avi
基于以上思路,我們也可以對其他幀的顯著性區域進行檢測并標記,然后在全景圖中保留該部分顯著性區域.實驗結果表明:采用該算法能夠獲得單獨的不同姿勢的全景圖.但該算法有一個不足之處,就是在全景圖中不能詳細顯示運動對象的運動狀態,即同時保留多個姿勢實現包含多對象的全景圖,這就是我們下面要研究的問題.
1.4多形態運動對象的全景圖生成方法
為了使全景圖能夠完全顯示運動對象在視頻中的概況,可以采用一種基于流形的視頻拼接和基于特征點圖像拼接相結合的方法來構造最終的運動全景圖,最終在全景圖中保留運動對象不同時刻的多個形態.該方法的主要思想是:先根據光流法提取視頻中的若干關鍵幀,然后以關鍵幀圖像中的顯著性區域作為約束對象分別實現基于內容的全景拼接圖像,再結合圖像分割算法將各張全景拼接圖融合到一起,最終實現包含多運動對象的全景拼接圖.運動全景圖的拼接主要有兩個步驟:1) 關鍵幀的提取與圖像序列對齊;2) 運動全景圖的融合.
1.4.1關鍵幀的提取與圖像序列對齊
由于處理的對象是攝像機平面運動狀態下拍攝的存在局部運動的視頻,方法的目的是要捕捉對象的全局性運動,所以可以利用基于運動分析的方法[12]提取關鍵幀.首先,快速提取光流信息[8];然后利用光流信息分析計算運動量,選取運動量達到局部最小值的點作為關鍵幀.各關鍵幀中的運動對象構成的運動軌跡大致涵蓋了視頻中的主要運動信息,本方法把關鍵幀中的運動對象定義為顯著運動對象,擬對視頻的顯著運動對象進行檢測與提取,然后把這些對象作為約束條件分別進行全景圖拼接.
在確定參考幀后,需要對圖像序列作對齊操作.本方法實現時選擇無約束條件的拼接圖作為參考幀,然后對其他帶約束條件的全景圖作對齊變換,把它們全部對齊到參考幀坐標系中.待變換的圖像需要與參考幀圖像找到對應關系,才能進行對齊變換.兩者之間的對應關系可以用單應矩陣來表示.求解單應矩陣的過程如下:1) 檢測圖像的局部特征;2) 為每個特征提取特征描述符;3) 根據特征描述符進行特征點匹配;4) 利用RANSAC方法求出單應矩陣.
接下來,對每幀圖像進行Harris特征提取,把待對齊的圖像與參考幀圖像的特征點進行匹配,建立對應關系,可用公式表示為
ui=Hijuj
(9)
其中:Hij記為單應矩陣;ui和uj分別為特征點在圖像中的具體位置(x,y坐標).
最后,根據單應矩陣對圖像進行仿射變換,把其他帶約束條件的全景圖像對齊到參考幀坐標系中.
1.4.2運動全景圖的融合
在根據Harris角點特征匹配的基礎上對齊各張全景圖像后,可直接進行運動全景圖的融合,得到包含多個運動信息的全景圖.但是,直接融合的圖像中運動對象明暗不一,部分圖像細節丟失,顯著對象信息不突出[13].所以,為了解決上述問題,我們采用圖像摳像技術預先對帶約束的全景圖像實現前景運動對象的提取,得到相應的前景控制圖(mask圖),再進一步實現圖像融合.
首先,對帶約束的全景圖像作處理以實現全景圖像的前/背景分割[14].該方法利用簡單的人機交互,用戶只需在前景對象以及背景對象上各取幾個點作為樣本輸入,就可以實現理想的前/背景分割.此外,引入非局部區域的k近鄰區域來代替原有的局部線性窗口區域,不需要建立局部的線性色彩模型,也不要進行復雜的抽樣策略,大大提高了算法的實現效率.與此同時,該方法對于前景對象的細節處理也非常到位,能夠提取出較為細致的前景對象.
然后,結合預生成的mask圖,利用加權平均算法來實現圖像融合.不同全景圖運動對象有可能出現重疊的現象,其權重的大小根據時間的先后原則來確定.假定無約束條件的全景圖像的像素值記為pm(i,j),其他各張帶約束條件的全景圖像的像素值記為pi(i,j).兩張圖像的融合方法為
(10)
其中pn(i,j)為新生成的圖像.如果時間上較早發生的運動形態,設置較大的權重值,然后根據時間順序依次遞減.本方法在實現時,設置α1=0.9,α2=0.8.
根據以上算法分別對mashu.avi和jieli.avi視頻進行了運動全景圖合成,結果如圖6所示.在全景圖中,我們采用連續的透明度表示運動的發生時間,透明度越大則表示發生時間越早,通過該形式就可以間接表現出對象的運動軌跡.
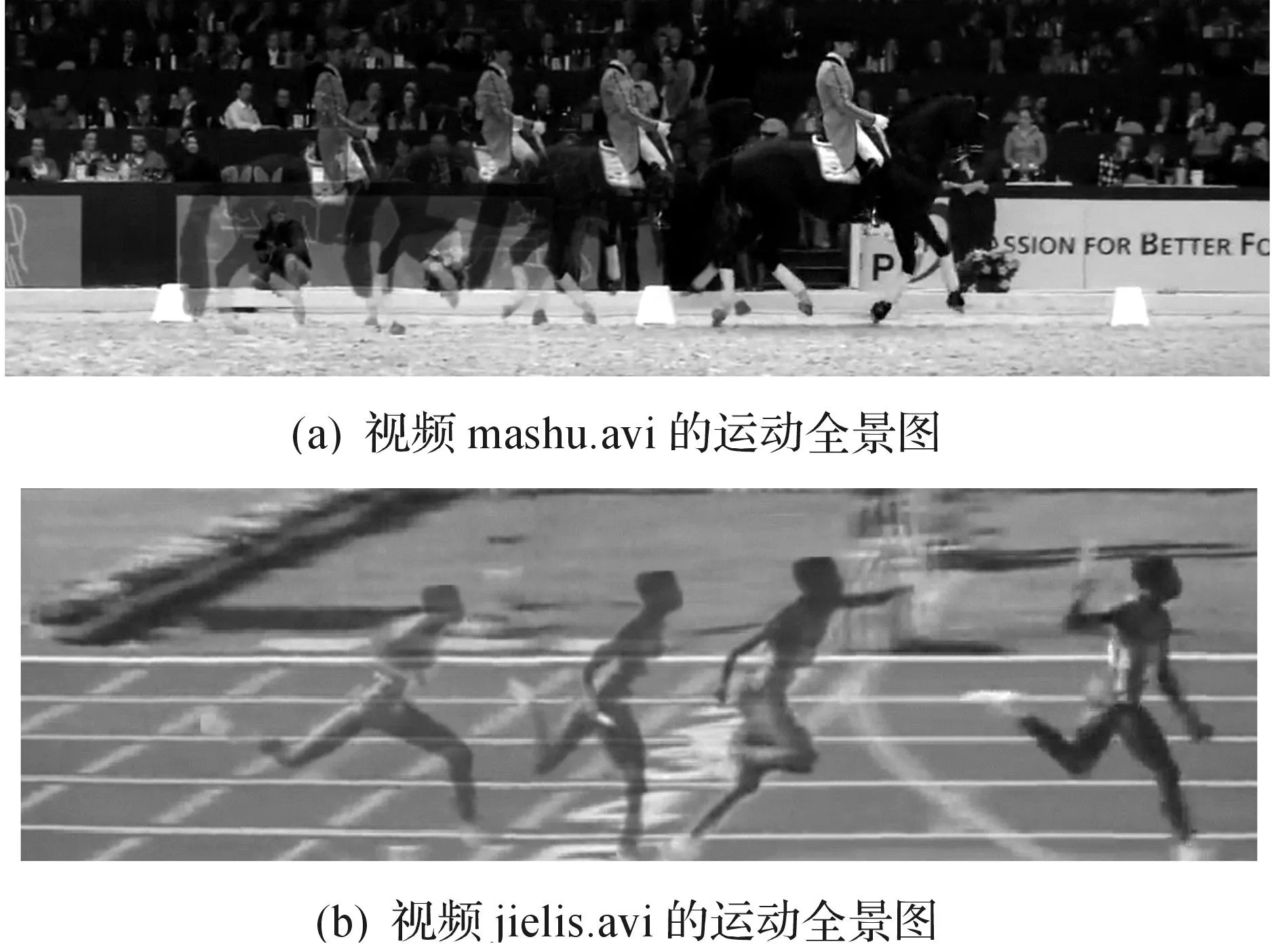
圖6 運動全景圖效果 Fig.6 Motion panorama stitching image
通過實驗效果分析發現:該方法在一定程度上達到了用戶想要在全景圖中看到運動對象的運動信息的期望,但是,其實現速度還是相對較慢.因此,可以基于CUDA并行計算方法實現算法加速優化.
2基于CUDA的全景拼接圖的加速與優化
視頻全景拼接過程中,視頻幀的分辨率以及幀數的多少是影響拼接速度的主要因素.基于流形的拼接算法主要包括鄰接矩陣的構建和尋找最短路徑,因此CUDA上的加速與優化也從這兩部分展開.
2.1鄰接矩陣的構建
鄰接矩陣的構建主要包含鄰接結點的確定和權重的設定,相鄰兩個結點所在像素列之間的顏色差值決定了連接邊的權重值D(V,V′).鄰接矩陣的賦值需要遍歷每個結點,然后計算每個結點與其鄰接結點之間的權重值.結點數目越多,計算越慢.但該計算過程的邏輯是很簡單的,而且每相鄰兩個結點之間的計算與其他結點之間也相互獨立.因此,該過程可以通過GPU的多線程來對其優化.
假定視頻大小為640×480×50,結點個數即為640×50.視頻的鄰接點在幀間的轉變范圍和像素列在相鄰幀上的x范圍分別為xrange=[1,2,…,10],trange=[0,1],那么圖像的鄰接結點可取當前幀的下一像素列,以及下一幀圖像對應位置的像素列到下10個像素列.為方便計算,把每個像素點定義成一個結構struct mpixel {intr; intg; intb;},該結構中包含了像素點的rgb信息.
然后,開辟顯存空間來存放計算結果.數組result用來存放每個線程的計算結果,定義其大小為640×480×50×11.用數組dis來存放每個結點與其11個鄰接結點之間的距離,定義其大小為640×50×11.視頻信息所需存儲超過顯存連續可開辟的最大空間時,可采用分塊傳輸與計算.
大小為640×480×50的視頻,可有640×50個結點并行計算權重.開辟640×50個block,每個block的工作是計算當前結點的鄰接信息.再給每個block開辟480個線程,每個線程對應一個像素點.獨立計算當前像素與其他11個相鄰像素之間的顏色距離,該計算過程見圖7.

圖7 CUDA的并行結構 Fig.7 Parallel structure of CUDA
根據內建函數變量blockIdx.x,blockIdx.y獲取block在網格grid中的索引號bid_in_grid,變量threadIdx.x獲取線程thread在網格中的索引號tid_in_grid.計算完每個結點的鄰接信息之后,需要對block中的所有線程進行累加獲取一整個像素列的顏色距離.可用公式表示為
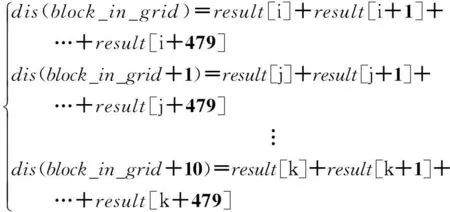
(11)
每個線程都有11個鄰接信息,每個鄰接信息都要進行累加計算,該累加過程可讓11個線程并行計算,每個線程進行累加計算時,可通過歸約算法進一步提高計算效率.
2.2最短路徑搜索算法的并行計算
影響拼接速度的另外一大關鍵就是最短路徑的查找,Dijkstra算法的主要步驟Initial,ExtractMin和Relax都可以通過CUDA來加速實現,其具體的算法步驟如下:
在ExtractMin部分,可利用Reduction來加速,其算法復雜度為O(logn).在CUDAC平臺中有一個模板庫Trust,它封裝實現了并行計算的函數接口,Reduction就是其中的并行計算方法.Reduction算法利用二分法來將一組數據轉換成某個要求的數值,比如,可以利用該算法實現最小值的查找.
Relax部分的主要工作是判斷是否需要更新最小值.若是d[u]+c(u,v) 若每個結點的鄰接結點個數很少,該并行算法將不能體現并行的優勢,反而會因線程的頻繁調度反而會影響程序執行的效率.最短路徑搜索的并行計算采用Δ-Stepping算法[15]實現,該算法是Dijkstra的最優改進算法.Δ-Stepping算法是一種基于桶并行Dijkstra算法,它用多個桶Buckets來保存結點,每個桶中保存的結點個數與Δ的大小密切相關.在桶B[i]中保存的結點為{v∈V且tent(v)∈[i×Δ,(i+1)×Δ},V表示結點集合,tent(v)表示從源結點到結點v的累積權重值.其中Δ的取值有三種選擇:權重中值、權重平均值、最大權重值除以節點出度最大值的商,這里采用第三種方法. 3實驗結果分析 筆者在CPU為Intel(R)Core(TM)2DuoCPUE8300@2.83GHz2.83GHz、內存為2 048MB(DDR2SDRAM)、顯卡為NVIDIAGeforceGTX580且安裝MicrosoftWindows7操作系統的機器上實現了算法代碼.此外,為了比較不同算法在處理效率上的差異,除了在VS2008平臺上結合OPENCV開發庫和CUDA開發庫,實現了基于CUDA的并行優化方法,還在MATLAB平臺上實現了基于流形的視頻拼接方法和基于高斯金字塔結構的視頻拼接串行優化方法. 對兩段視頻friend.avi和hanbing.avi分別采用CUDA加速下的帶顯著性區域約束的視頻圖像拼接方法、基于高斯金字塔結構的串行優化拼接方法和直接拼接方法進行實驗,實驗結果如圖8,9所示.三種方法都可以通過保留某一幀圖像中的顯著性區域或者固定區域,生成帶約束的全景圖;但是,對于包含局部運動的視頻,帶顯著性區域約束的視頻圖像拼接方法還可以生成運動全景圖,在全景圖中以時間順序突顯出對象的運動軌跡,如圖8(c)和圖9(c)所示.三種方法進行帶約束的視頻拼接時,在不同幀數情況下實現的時間如表1所示. 圖8 friend.avi視頻全景圖拼接結果 Fig.8 Panorama stitching reults of friend.avi 實驗結果表明:三種方法均可以生成帶約束的視頻全景拼接圖,該全景圖可以保留指定時刻的運動對象形態,在實際應用過程中,能夠滿足用戶需求;而筆者提出的方法還可以生成運動全景圖,該全景圖保留了多個時刻的運動對象形態,有助于用戶通過全景圖獲取視頻中運動對象的形態變化情況,對于了解視頻詳細內容有更大的幫助.因此,提出的方法更適合實際應用. 圖9 hanbing.avi視頻全景圖拼接結果 Fig.9 Panorama stitching results of hanbing.avi 視頻名稱視頻大小帶顯著性區域約束的視頻圖像拼接/s定義鄰接矩陣搜索最短路徑總時間基于高斯金字塔結構的串行優化拼接/s第4層第3層第2層第1層總時間直接拼接總時間/sfriend.avi720×480×50720×480×100720×480×150720×480×2001.8563.7445.6007.6347.70318.15527.68736.8919.55921.89933.28744.52522342347812182227659314739821181802865828901165hanbing.avi640×360×50640×360×100640×360×150640×360×2001.2942.5893.8695.1466.22012.49119.07424.8937.51415.08022.94330.0391112123479101341556374506777932615367941055 雖然三種方法都可生成帶約束的全景圖,但是其拼接速度有很大的差異.基于高斯金字塔結構的串行優化拼接方法比直接拼接的方法在實現速度上有很大提高;而采用CUDA并行加速的帶顯著性區域約束的視頻圖像拼接方法在處理時間上明顯快于其余兩種方法;因此,我們提出的帶顯著性區域約束的視頻圖像拼接方法在采用CUDA并行計算方法后,有明顯的加速效果,可以應用于分辨率更高、時間更長的視頻,進一步擴展了方法的適用性. 4結論 筆者從視頻內容出發,提出了一種帶顯著性區域約束的高效視頻圖像拼接方法.采用基于時空空間的流形拼接算法,把視頻拼接問題劃歸為圖論問題,滿足了用戶希望保留某一幀圖像中的顯著性區域或者固定區域的需求.同時對于包含局部運動的視頻,先通過基于光流場的方法實現關鍵幀的提取,然后對關鍵幀中的顯著對象進行提取并作為約束對象分別實現帶約束的全景拼接圖.最后,提出了基于CUDA并行的優化方法,改善了在處理時間較長、分辨率較高的視頻時拼接速度較慢的問題.實驗結果表明基于顯著性約束的視頻圖像拼接方法生成的運動視頻全景圖像拼接結果能夠滿足實際應用需求,產生的多運動形態全景圖能夠幫助用戶更好地理解運動視頻全貌,而CUDA加速方法的應用進一步提高了拼接速度,使圖像拼接技術可以適用于更高清、時間更長的視頻. 參考文獻: [1]鄭莉莉,黃鮮萍,梁榮華.基于支持向量機的人體姿態識別[J].浙江工業大學學報,2012,40(6):670-675. [2]PELEG S, HERMAN J. Panoramic mosaics by manifold projection[C]//IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Juan: IEEE,1997:338-343. [3]ZOMET A, PELEG S. Efficient super-resolution and applications to mosaics[C]//International Conference on Pattern Recognition. Barcelona: IEEE,2000:579-583. [4]PELEG S, ROUSSO B, RAV-ACHA A, et al. Mosaicing on adaptive manifolds[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(10):1144-1154. [5]RAV-ACHA A, SHOR Y, PELEG S. Mosaicing with parallax using time warping[C]//IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops. New York: IEEE,2004:164-164. [6]WEXLER Y, SIMAKOV D. Space-time scene manifolds[C]//10th IEEE International Conference on Computer Vision (ICCV 2005). Beijing: IEEE,2005:858-863. [7]張樹江,邢慧,顏景龍,等.一種改進型視頻全景圖流形繪制方法[J].光子學報,2007,36(s1):299-302. [8]HU F, LI T, GENG Z. Constraints-based graph embedding optimal surveillance-video mosaicing[C]//Asian Conference on Pattern Recognition. Beijing: IEEE,2011:311-315. [9]郭李云,歐陽寧,莫建文.長視頻序列拼接[J].計算機工程與應用,2011,47(14):183-185+195. [10]張美玉,簡睜峰,侯向輝,等.Dijkstra算法在多約束農產品配送最優路徑中的研究應用[J].浙江工業大學學報,2012,40(3):321-325. [11]彭宏,韓露莎,王輝,等.基于小波變換與多幀平均法融合的背景提取[J].浙江工業大學學報,2013,41(2):228-231. [12]LIU C. Beyond pixels: exploring new representations and applications for motion analysis[D]. Boston: Massachusetts Institute of Technology,2009. [13]TANG C K, LI D, CHEN Q. KNN matting[C]//IEEE Conference on Computer Vision and Pattern Recognition. Providence: IEEE,2012:869-876. [14]WOLF W. Key frame selection by motion analysis[C]//IEEE International Conference on Acoustics, Speech and Signal Processing. Atlanta: IEEE,1996:1228-1231. [15]MEYER U, SANDERS P. Δ-stepping: a parallelizable shortest path algorithm[J]. Journal of Algorithms,2003,49(1):114-152. (責任編輯:劉巖)