基于DSP的PMSM伺服控制系統設計
2016-01-25 06:18:47張玉地孫福佳王君會
電力科學與工程 2015年3期
張玉地,錢 煒,孫福佳,王君會
(上海理工大學 機械工程學院,上海200093)
基于DSP的PMSM伺服控制系統設計
張玉地,錢煒,孫福佳,王君會
(上海理工大學 機械工程學院,上海200093)
摘要:基于永磁同步電機(PMSM)的矢量控制原理,設計了一種以TMS320F812信號處理器為核心的PMSM伺服仿真控制方案,來實現PMSM的最佳控制。自行設計加工了PCB控制板,并將控制核心F2812DSP芯片、PS21767功率模塊等元件集成焊接到控制板上,不僅系統的集成度增高,而且易于實現數字化控制。同時在CCS3.3的環境下采用SVPWM技術進行軟件設計,實現永磁同步電機的控制,最后用Matlab驗證了該伺服系統的正確性。結果表明:該系統在電機的位置、轉速、轉矩等控制方面有明顯的優勢,性能良好。
關鍵詞:PMSM伺服控制;硬件設計;軟件設計;Matlab仿真
中圖分類號:TM351
文獻標識碼:A
DOI:10.3969/j.issn.1672-0792.2015.03.011
收稿日期:2014-11-21。
作者簡介:張玉地(1990-)女,碩士研究生,研究方向為機械設計,E-mail: zhangyudiys@163.com。
Abstract:In order to achieve the best control of permanent magnet synchronous motor(PMSM),a servo control scheme with TMS320F2812 as the core was designed, based on the principle of PMSM vector control. PCB board was designed and processed. Meanwhile the F2812DSP chip, PS21767 power modules were integrated welding to the PCB board. The system integration was increased and the digital control was easy to be realized from this way. The control of permanent magnet synchronous motor was implemented using SVPWM technology in the CCS3.3 environment. Finally, matlab verifies the correctness of the servo system. The results showed that the system has significant advantages and good performance in the control of motor position, speed, torque and other aspects.
Keywords:PMSM servo control, hardware design, software design, matlab simulation

0引言
隨著集成電路、電力電子技術和交流可變速驅動技術的發展,交流伺服驅動有了較快的發展。由于永磁同步伺服電機結構簡單、體積小、轉動慣量小及調速性好等優點,已被廣泛應用于眾多領域中[1]。為了實現精確、穩定、響應快速等的控制要求,對PMSM的高性能伺服系統控制設計已成為研究熱點。
本文在SVPWM矢量控制原理的基礎上,以永磁同步電機為研究對象搭建了以TMS320F2812為控制核心,以三菱公司的智能功率模塊PS21767為功率元件的高性能伺服系統,重點分析了所設計功率電路、控制電路和檢測電路的優越性,并在CCS3.3開發環境下,設計了軟件算法。又用Matlab進行系統仿真,驗證伺服系統在實際調試中的正確性與可行性,并將Matlab仿真結果和實際DSP硬件調試結果進行對比,實現了永磁同步電機響應快、定位準確、運行平穩等高性能伺服控制要求[2]。
1PMSM的矢量控制依據
當用三相平衡的正弦電壓向永磁同步電機供電時,電動機的定子磁鏈空間矢量幅值恒定,并能以恒速旋轉,磁鏈矢量的運動軌跡形成圓形的空間磁場[3]。永磁電機轉速的表達式可表示為:n=60f/p,其中n為電機轉速,p為極對數,f為電源頻率。所以,若能保證向PMSM提供可變頻電源,同時讓電機形成定子磁鏈圓,就可以實現PMSM的變頻調速控制。為了得到頻率可變的電源,采用逆變器向電機提供三相可變頻電源,電機相電壓取決于逆變器6個橋臂功率開關管的開關狀態,同時用不同開關模式產生的實際磁場模式去逼近基準圓形磁場。而6個開關管的開關狀態則是依據SVPWM矢量原理產生,當輸出PWM的占空比變化時,開關時間隨之變化,從而輸出電壓頻率變化,電機速度得到控制,保證了實際磁場無限逼近基準圓磁場。
2DSP仿真控制的設計
2.1 總體控制策略的設計
在進行硬件電路設計時制定總體控制策略包括三部分:功率電路、控制電路和檢測電路。功率主電路包括三相整流濾波電路、IBGT逆變電路和永磁同步電機;控制電路包括以TMS320F2812為控制核心的DSP芯片和外圍電路[4];檢測電路包括基于霍爾傳感器的電流檢測電路和基于多摩川絕對編碼器的位置速度檢測電路等。工作時,霍爾傳感器和絕對編碼器檢測到電機輸出的相電流信號和相關脈沖,并將這些作為電流、速度及位置的反饋信息傳送至DSP。TMS320F2812通過采集外圍的控制輸入信號和反饋信號,結合控制程序,產生PWM波,從而實現電機變頻調速的控制。將上述電路集成制作到一塊PCB控制板上,通過選擇相關元器件,自行設計焊接了開環控制部分如圖1所示。
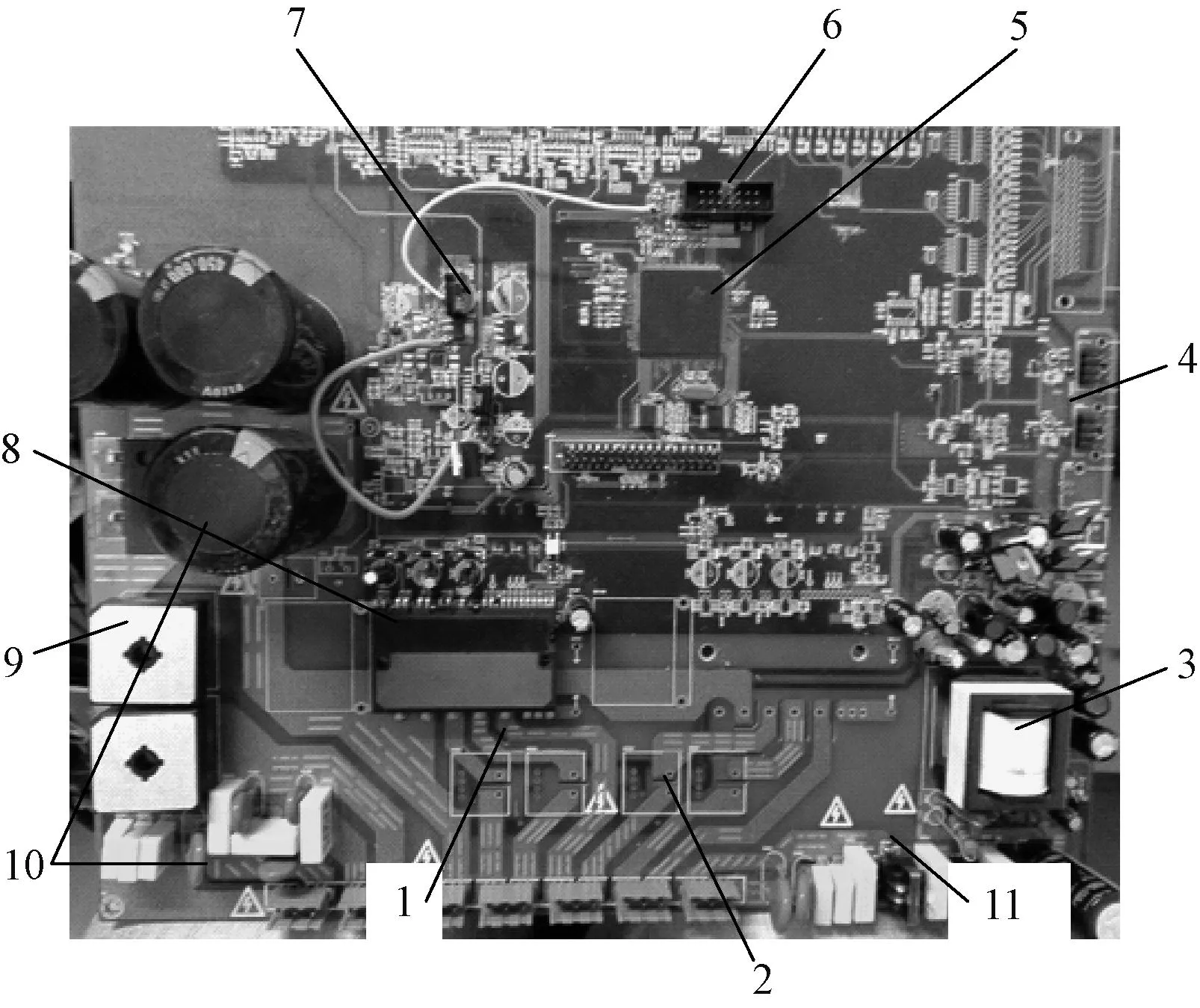
圖1 PCB控制板1 霍爾傳感器模塊,2 220V交流電源,3 變壓器,4 SCI模塊,5 DSP芯片,6 JPAG接口,7 芯片供電模塊,8 PS21767功率模塊芯片,9 整流橋,10 電容,11 電感
2.2 控制器的選擇
圖中5為控制部分的核心部件,選擇了TI公司的TMS320F2812PGF176芯片作為控制元件[4],因為是32位的基于DSP的控制器,具有片內FLASH存儲器和高達150 MPS的性能,同時具有增強的電機控制外設,高性能的模數轉換和多類型的改進型通信接口如SCI、SPI、CAN、McSBP,可以實時處理許多復雜的控制算法[1]。仿真器選用研旭公司的TIDSP-X-DS510,因其安裝簡單、運行穩定且仿真速度快,不占用目標系統資源,能自動適應DSP的電壓。實際工作時,電源部分供電后,DSP模塊啟動,仿真器一端和JTAG相連,一端和計算機相連,用CCS3.3編寫的控制程序通過仿真器下載到DSP中進行仿真控制。控制部分的驅動電源是由220 V交流電經濾波、整流、變壓后可以得到的3.3V、1.8V直流電壓提供的,電源品質的好壞直接影響到調試中程序能否順利執行下去,輸出理想的PWM波形。
2.3 功率主電路的設計
在系統中,220V電源首先經過整流變為直流電[5],又通過電容濾波,依據DSP生成的SVPWM信號經逆變電路輸出電機所需要的交流電。逆變電路[6]是功率驅動部分的核心。本設計采用了三菱公司的智能功率模塊PS21767芯片,驅動程序和保護電路。是一個緊湊直插式模塊,采用三菱公司的第5代IGBT作為功率管,內部集成了高壓芯片HVIC和電機變頻驅動應用的保護電路。IPM的驅動電路如圖2所示。
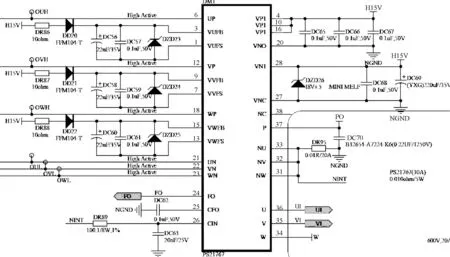
圖2 IPM驅動電路
如圖所示為DSP輸出的6路SVPWM信號,經過三態緩沖器74HCT541增強驅動能力,并經限流電阻和驅動光電耦合器ACPL-P480后送給智能功率模塊PS21767的UP,VP,WP,UN,VN,WN輸入端口。通過改變6路SVPWM信號的輸出順序來改變PS21767中功率管的導通順序;通過調整脈沖寬度來改變功率模塊輸出相電流大小,最后UI,VI,W輸出端口連接到永磁同步電機的定子三相繞組上給電機提供電源。PS21767通過VUFB,VVFB,VWFB三路端口和電阻,電容,快速恢復二極管相連形成自舉回路進行充電。這樣PS21767就實現了三相逆變橋僅需一個15V電源供電,降低了系統的復雜性及成本,提高了系統可靠性。
2.4 位置/速度檢測電路
以往經常采用增量式編碼器進行位置和速度檢測,通過計算編碼器旋轉時輸出的脈沖個數,來計算電機的旋轉位置,當編碼器不動時,依靠技術設備內部的記憶來記住位置,因此當停電后,編碼器不能有任何的移動;當正常工作時,編碼器不能有干擾而丟失脈沖。這樣,在實際的工程項目中會帶來很多的不便。此處,采用多摩川公司生產的型號為TS5668N21的17位絕對編碼器來實現位置/速度檢測,并自行設計了將絕對編碼器信號轉化為DSP能識別的串口信號電路如下圖3所示。圖中電機的編碼器信號通過SCIA串口輸入到DSP中,由于該信號是差動信號,所以在輸入DSP之前,需要通過差分總線收發器SN65176BD(BDR)G4芯片將差動信號轉化為DSP可識別的TTL串口信號。此外,所設計的伺服系統是通過一個DSP來控制兩個電機的,這樣降低了成本,發揮了TMS320F2812運算速度快及外設資源豐富的特點。較之于增量式編碼器,該絕對編碼器無需記憶,無需找參考點而且不容易受停電等的干擾。
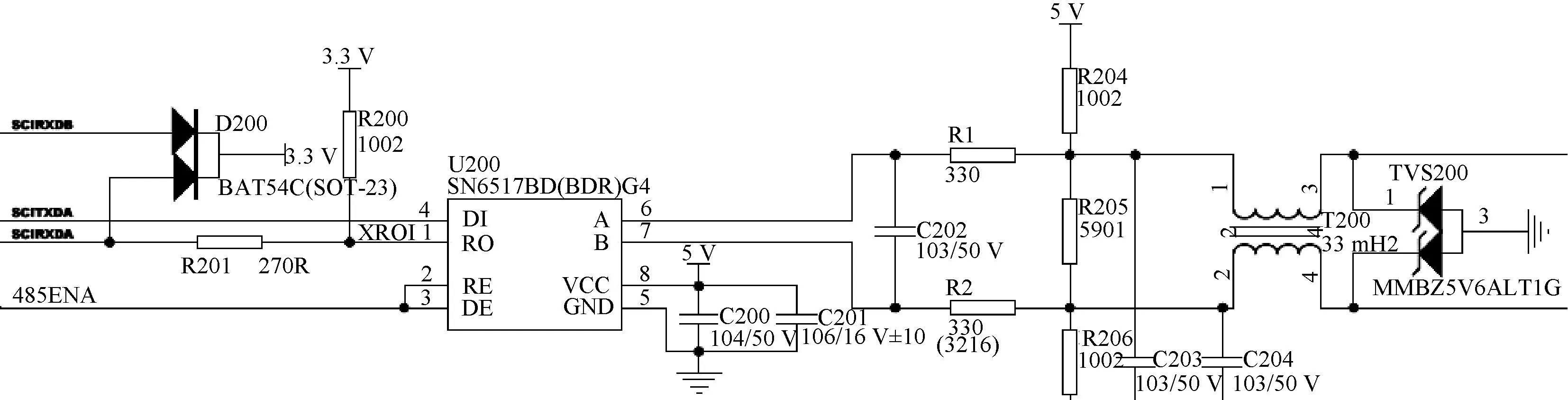
圖3 位置/速度檢測電路
2.5 電流檢測電路
永磁同步電機的三相定子電流檢測采用C25SY系列的霍爾傳感器,該傳感器精度高、線性度好、抗干擾能力強、響應速度快。在PMSM控制中霍爾傳感器可以檢測到電機輸出的相電流并作比例變換至幅邊,然后經過高頻率波、運算放大和偏置電路得到0~3.3V的電壓信號,輸入到DSP的A/D口,從而獲得定子電流的反饋信號。
2.6 系統軟件設計
伺服系統的軟件是在TI公司的CCS3.3的集成開發環境下采用C語言和匯編語言設計實現的,主要包括主程序和中斷服務程序[7]。主程序包括系統初始化、中斷向量初始化、GPIO初始化、各個控制寄存器的設置、中斷向量函數的分配、開中斷等,并對系統所使用的變量賦初值。中斷服務程序包括T1定時器下溢中斷、QEP捕獲中斷、功率驅動保護電路的中斷等。其中定時器T1的下溢中斷是整個伺服系統設計的核心,全部的矢量控制算法都是在T1下溢出中斷服務程序中實現的,主要包括A、B兩相電流的采集及計算、轉子位置和速度計算、電流及速度PI調節、坐標變換、SVPWM的生成[8],流程如圖4所示。
由圖可知,通過坐標變換,PMSM的三相電流等效轉化為兩相電壓系統,定子電流矢量分解成d、q軸兩個相互正交的電流分量[9],實現轉矩控制和磁場解耦控制,從而將永磁同步電機等效為一臺直流電機,獲得和直流類似的控制效果。
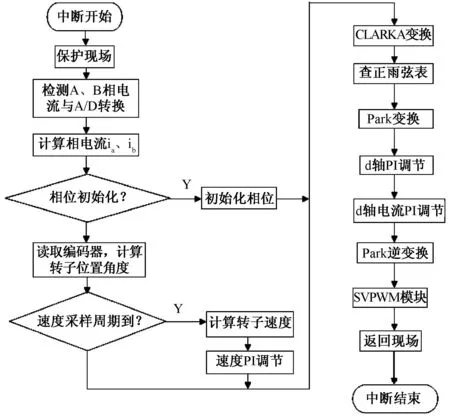
圖4 中斷程序流程圖
3仿真結果及分析
若直接用控制板進行電機調試,沒有很好的數據參數,容易損壞電機;若只用Matlab仿真,并不能反映實際電機控制中的問題,比如電源部分對PWM波形的影響等。因此,我們依據上述伺服系統搭建了Matlab仿真控制模型[10],并且配置參數進行仿真控制。對Simulink環境進行設置如下:仿真參數的算法為可變步長,ode23tb;永磁同步電機的參數選擇如下:直流母線電壓300 V、額定轉速nN=2 000 r/min,額定轉矩Tn=8 Nm,極對數為P=4、定子繞組電阻r=0.958 5 Ω、dq軸的轉子電感La=Lq=5.25 mH、轉子的磁通量為φt=0.182 7 Wb、轉子轉動慣量0.632 9×10-3 kgm2、系統在t=0時空載啟動,預設的轉速為700 r/min,d軸電流為0,死區時間設為3.2 μs.在t=0.2 s時,加上2 Nm階躍干擾,載波周期為20 kHz,對速度和電流PID進行適當參數配置后仿真,電機輸出的電磁轉矩波形如圖5所示。
由圖可知,在電機最初空載啟動時,存在一定程度的波動,但很快達到穩定狀態,在0.2 s時,給電機施加2 N·m的轉矩后,電機稍有波動,迅速恢復到2 N·m的轉矩狀態,對應電機的轉速如圖6所示。
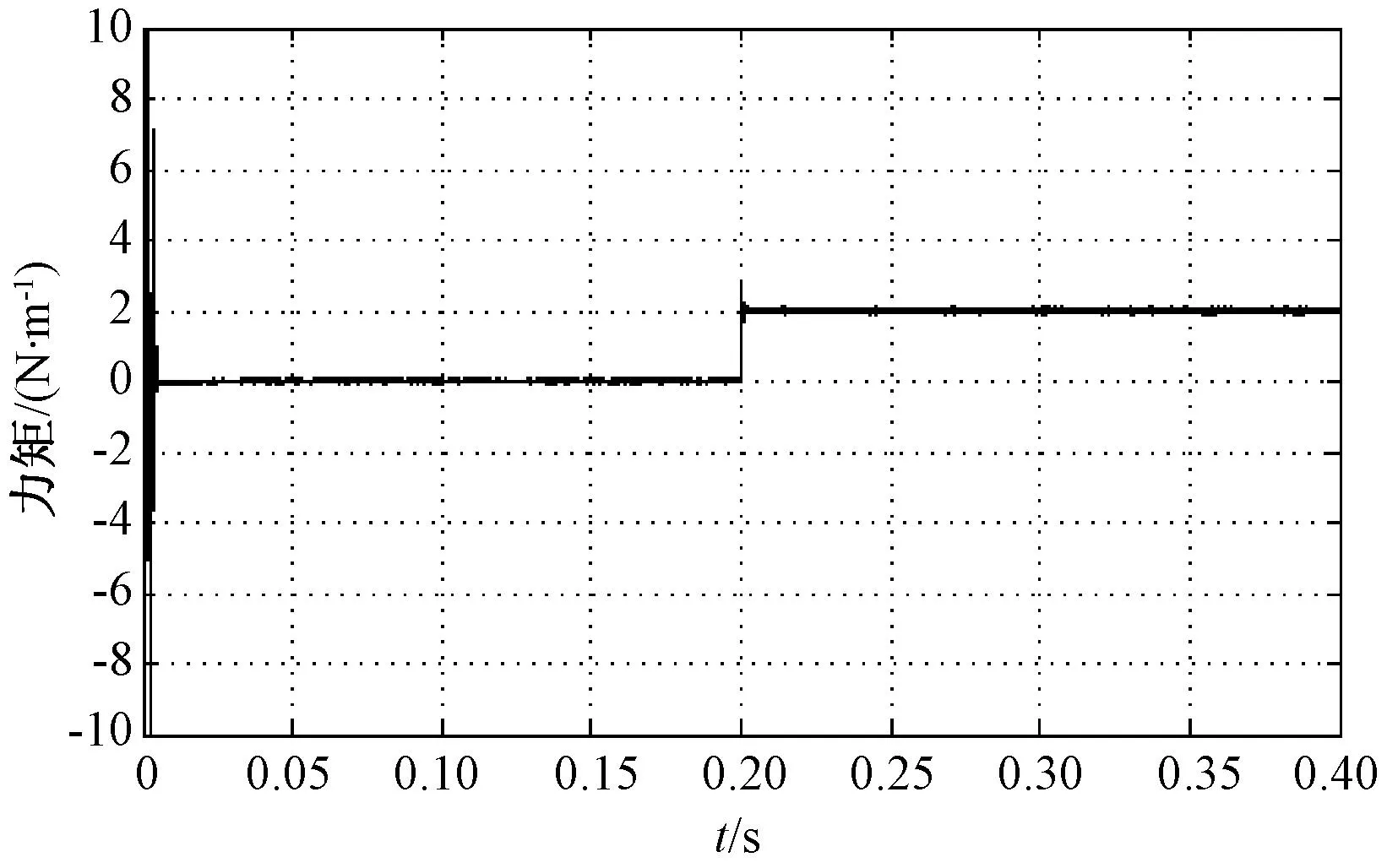
圖5 電磁轉矩波形
由圖知,電機在最初啟動時,轉速上下波動,但迅速穩定在給定轉速位置,在0.2 s時,由于突然施加轉矩,轉速出現微小波動后又恢復穩定,說明系統具有較小的良好的抗干擾能力和靜差率[11]。
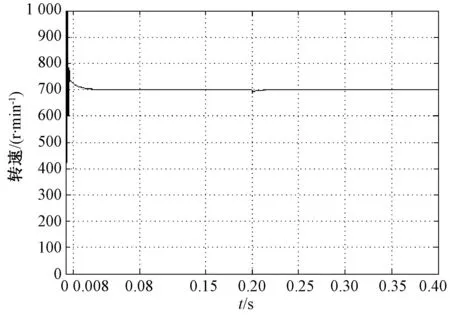
圖6 轉速波形
此時將仿真中各參數進行標幺化處理,統一化為Q格式表示,并用C語言將其寫入CCS3.3的算法程序中,進行DSP硬件調試,并將最終逆變器輸出的波形用UT2102CE系列的示波器顯示。所用硬件測試平臺如圖7所示。
如圖所示,當硬件平臺上電源部分調試好后,通過上位機SVPWM算法程序被下載到DSP芯片中,強電逆變后的電壓用24V直流電壓代替,連接圖示的永磁同步伺服電機后,電機正常轉動。通過調節程序中的d-q旋轉坐標系中q軸參考電壓Vqtesting和速度參考Speedref的值,可以改變輸出電壓的幅值和頻率。此時用示波器測量圖2中逆變器UI、VI和W三引腳上的輸出波形,通過濾波等處理,最終得到的三相電壓波形。由于示波器只有兩只表筆,故以UI、VI為例如下圖8所示。

圖7 硬件測試平臺
由圖知縱坐標峰值為24.2 V,載波周期為50 μs。通過分析兩電壓間的相位差易知,兩相相位相差120°,同時不斷調節Vqtesting和Speedref的值,可以觀察到變化的電機轉速和輸出電壓頻率,達到了永磁同步電機變頻調速的目的,并且擁有良好的響應性能。
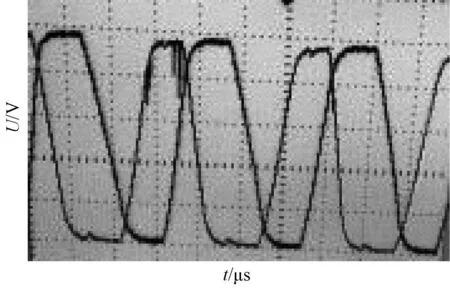
圖8 UI、VI相電壓波形
4結論
(1)用TMS320F2812芯片作為控制核心,使得控制系統集成度高且控制簡單。
(2)用多摩川編碼器作為速度/位置檢測的核心部件,簡化了系統算法,且使系統抗干擾性強、響應速度快、數據可靠性大大增強。
(3)仿真和實踐證明,該伺服控制系統運行可靠、平穩、系統響應速度快,可以廣泛用于永磁同步電機的矢量變頻調速系統中。
參考文獻:
[1]程善美,蔡凱.DSP在電氣傳動系統中的應用[M].北京:機械工業出版社,2010.
[2]姜艷華,張連勇.基于TMS320F2812的永磁交流伺服系統設計[J].遼寧工程技術大學學報:自然科學版,2013,32(5):648-651.
[3]王曉明.電動機的DSP控制:TI公司DSP應用[M].北京:北京航空航天大學出版社,2004.
[4]劉明,付金寶,何勇,等.TMS320C2000DSP技術手冊:硬件篇[M].北京:科學出版社,2012.
[5]張豪,侯圣語.基于SVWPM的Vienna整流器矢量控制策略的研究[J].華北電力大學學報:自然科學版,2012,39(5):54-58.
[6]武衛革,翟志強,趙志強,等.光伏組件逆變器控制系統設計[J].電力科學與工程,2012,28(3):17-20.
[7]凱利波爾.C語言教程[M].徐波,譯. 北京:機械工業出版社,2007.
[8]王家軍,郭超,金利勤.基于逆變器死區的空間矢量脈寬調制仿真研究[J].杭州電子科技大學學報,2010,30(6),71-75.
[9]陳棟,劉振興,張曉菲.SVPWM整流器IGBT模塊的故障診斷技術研究[J].華北電力大學學報,2012,39(4):72-76.
[10]王桂榮,李太峰.基于DSP的PMSM矢量控制系統的設計與研究[J].電力電子技術,2012,46(2):114-116.
[11]付光杰,孫勝男,杜立志.基于SVPWM控制的永磁同電機調速研究[J].化工自動化及儀表,2013,40(4):497-500.
Design of PMSM Vector Control System Based on DSP
Zhang Yudi, Qian Wei, Sun Fujia, Wang Junhui(School of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200093,China)