一種非線性濾波器在協調控制系統前饋控制中的應用
2016-01-26 02:50:00王桐,田亮
電力科學與工程 2015年8期
王 桐,田 亮
(華北電力大學 控制與計算機工程學院,河北保定071003)
一種非線性濾波器在協調控制系統前饋控制中的應用
王桐,田亮
(華北電力大學 控制與計算機工程學院,河北保定071003)
摘要:西北電網聯絡線調度下AGC指令復雜多變對火電機組穩定運行不利,為了改善火電機組協調控制前饋系統在AGC指令頻繁小幅度波動時造成鍋爐燃料量大幅度擺動的問題,研究了一種可變濾波時間的非線性濾波器;依據AGC指令變化幅度設計一種變濾波時間的非線性濾波器,對其動態微分部分輸出信號進行增益修正和濾波處理;采集西北某電廠660 MW 24 h AGC指令進行算例分析,通過對比改進前后的燃料量指令證明該非線性濾波器可以實現:AGC指令大幅度變化時,前饋足額快速輸出,以維持機前壓力穩定;AGC指令小幅度頻繁波動時,減小前饋輸出幅值并增加濾波時間以減少燃料量波動。通過對比改進前后的燃料量指令,證明了可變濾波時間系數的濾波器具有應用價值。
關鍵詞:非線性濾波器;濾波時間;協調控制系統;負荷指令前饋
中圖分類號:TM731
文獻標識碼:A
DOI:10.3969/j.issn.1672-0792.2015.08.006
收稿日期:2015-06-11。
基金項目:國家重點基礎研究發展計劃 ( 973 計劃) 資助項目( 2012CB215203);中央高校基本科研業務費專項資金資助項目(2014MS145)。
作者簡介:王桐(1991-),女,碩士研究生,研究方向為火電廠協調控制建模與燃燒優化,E-mail:1554425781@qq.com。
Abstract:Under the dispatch of linking-up road, the complexity and variability of AGC command affect the stability of thermal power units. In order to solve the problem that the amount of boiler fuel swings severely when AGC command fluctuations in a small amplitude, this paper explores a filter-time-variant nonlinear filter, which implements gain correction and filtering implementation on the dynamic differential part of output signal according to the variation amplitude of AGC command. In addition, 24 hours’AGC command of a 660 MW unit from a power plant in northwest China was collected to analyze the algorithm. After comparing the improved and non-improved fuel command we found the filter-time-variant nonlinear filter can realize the follow effects:when AGC command fluctuations in a small amplitude frequently, it reduces feed-forward output amplitude and increases filtering time to reduce the fluctuation of fuel amount. Thus, the result shows that this filter has a considerable effect on the coordinated control system of a 660MW unit.
Keywords:nonlinear filter; filtering time; coordinated control system; load command feed-forward

0引言
近些年來風電、水電、光伏等新能源發電技術的發展以及裝機容量大幅度增加[1],由于其發電負荷受很多不確定的自然條件的影響而很不穩定,導致電網側不得不頻繁的調整火電機組發電負荷來維持電網運行的穩定[2],因此AGC指令變得越來越復雜多變[3]。
如何使負荷指令前饋環節動態特性能夠適應各種類型的AGC指令,是協調控制系統研究的一個熱點問題。近些年來為了使火電機組快速響應復雜多變的AGC指令,眾多的學者都進行了研究,韓忠旭[4]等提出了“正踢”、“反踢”、“二級加速器”的方案設計協調控制前饋,對于大幅度變化的負荷指令取得了良好的應用效果;張建生[5]等提出了一種基于ALF幅值限制濾波器的前饋設計方案,可以改善小幅度快速變化指令微分項的波動情況。
本文以優化現有的前饋方案為目的,提出一種可以根據負荷變化幅度與頻率大小來確定前饋動態慣性時間常數的濾波方法[6];利用階躍變化的AGC指令與限速后的AGC指令之差作為慣性環節濾波時間,針對不同類型的AGC指令,自動適應,在保證機組跟蹤負荷指令變化的同時盡量減小“動態回調”以保證機組運行的安全穩定。
1AGC指令的復雜性分析
圖1為西北電網一臺660 MW機組2014年10月23日24 h AGC指令,從圖中可以看出其變化的負載性,主要的表現有:

圖1 西北某火電機組24 h AGC負荷指令
(1)AGC指令的變化范圍大,24 h負荷的最大值與最小值之差足足有300 MW。
(2)AGC指令的變化頻繁且變化速率快,最快時變化2次/min,由于火電機組,尤其是裝機功率大的機組,都存在大遲延,很難跟上如此快的變化指令[7]。
(3)AGC指令的波動性太強,由于電網側短時間負荷預測技術的限制,AGC指令經常出現波動的情況,即發電負荷正向變化結束后立刻反向變化,有時變化的范圍還很大,這對火電機組的安全穩定運行很不利。
電網側的聯絡線調度方式對火電機組的調峰能力提出了更高的要求[8],而“兩個細則”的提出對火電機組的經濟運行也提出了更大的挑戰[9],大部分火電機組需要優化其控制系統以快速響應復雜多變的AGC指令,而機爐協調控制系統就成為了整體優化的熱點。目前協調控制系統多采用爐跟機方式,但是鍋爐側被控對象存在大慣性和大遲延,火電機組在大幅度、高速率升降負荷工況下,只依靠反饋控制難以保證主蒸汽壓力穩定[10],因此設計合理的負荷指令前饋邏輯是協調控制系統優化的關鍵[11]。
2前饋環節的動態特性
2.1 傳統前饋控制方案
以傳統的爐跟機方式為例,為補償鍋爐的大延遲性,在前饋中引入微分環節,因此典型負荷指令前饋環節的傳遞函數[12]為:
綜上所述,本研究證實了茶堿緩釋片和多索茶堿均能改善輕度支氣管哮喘患者肺功能,兩者療效近似,但多索茶堿安全性好于茶堿。

(1)
可拆解為兩項,即:增益項和微分項。式中:K1為發電負荷對應燃料量的系數,(t/h)/MW;T1為動態微分時間,s;T0為基本慣性時間,s。
其對應的物理意義為:K1是單位發電負荷所對應的燃料量,用以維持燃料量對發電負荷的靜態對應關系;T1用于補償鍋爐側等效對象的慣性時間,一般取鍋爐制粉系統慣性時間的1/2~2/3,對象慣性越大,T1也越大;T0除用以保證傳遞函數的可實現性之外,同時實現對微分作用濾波的功能,防止負荷指令突變時燃料量突變造成燃料量突變。
2.2 傳統前饋設計方案的局限性
傳統前饋設計方案基本上能加快機組對AGC指令的響應速度,但是其微分部分因微分作用會造成如圖2 所示的震蕩現象,當前饋環節參數不變時,這種震蕩現象的幅度只與負荷指令變化速率有關,持續時間等于AGC指令限速后的負荷指令變化時間,從圖2中可以看出,微分項的動態回調峰值的大小與負荷指令變化幅值大小無關,而持續時間與幅值有關。

圖2 不同負荷指令下燃料量前饋微分項輸出回調
“動態過調”對于穩定被控參數是有利的,但會導致執行機構動作幅度、頻率加大,是以增加執行機構的動作速率、折損設備使用壽命為代價來加快響應頻繁變化的AGC指令。超臨界機組協調控制系統中,鍋爐主控輸出的燃料量指令直接或間接形成鍋爐燃料量、給水流量、二次風量、一次風量等眾多控制參數的設定值。燃料量指令大幅、頻繁變化,將導致上述參數設定值大幅波動,進而影響中間點溫度(或中間點焓)、氧量、一次二次風壓、爐膛壓力以及過熱、再熱蒸汽溫度的穩定性,對鍋爐安全運行不利;同時也容易造成磨煤機堵塞、振動,一、二次風機失速、喘振等故障,折損設備的使用壽命。
圖3 所示的3種不同的變化幅度、不同變化速率的AGC指令,可以將其劃分為三大類:高速單向大幅度變化Y1、中速雙向中等幅度變化Y2以及超高速雙向小幅度頻繁變化Y3。

圖3 3種不同種類AGC指令
圖4 為上述3種指令通過傳統前饋微分項后的燃料量的變化曲線,從圖中可以看出:

圖4 3種典型指令下燃料量指令前饋微分項輸出
(2)無論什么類型的AGC指令,通過微分環節之后都會出現“動態過調”現象,當指令負荷變化結束時其變化速率逐漸歸零,微分項輸出也逐漸歸零,歸零時間與T0有關,因此前饋環節存在一個燃料“動態過調”量歸零的過程,如果此時AGC指令恰好反向變化,則會出現一個新的反向的燃料量指令“動態過調”的過程,兩個作用效果相迭加,會出現燃料量指令劇烈變化的情況,如圖4 所示,負荷指令在250 s與350 s時發生正向、反向的高速大幅度變化,微分項的輸出在284~327 s之間,燃料量減少38.72 t,變化速率為54.028 t/min,這對機組的穩定運行不利。
3前饋設計方案
3.1 協調控制系統的燃料指令
如圖5 所示為爐跟機協調控制的燃料量控制邏輯,鍋爐側輸出的燃料量指令由3部分信號構成:(1)汽輪機前蒸汽壓力PID控制器輸出信號P1;(2)發電負荷指令前饋信號P2;(3)機前壓力指令前饋信號P3。而其中X1的主要作用是通過修正燃料量維持機前壓力跟住壓力定值并隨之變化;P3的主要作用是在滑壓-定壓運行方式下,滑壓段適當地多增(減)部分燃料量以補償壓力定值的變化。但是在實際升(降)負荷過程中,P1和P3兩部分調節量變化都相對較小,負荷指令前饋(P2)的輸出信號承擔主要的調節任務。
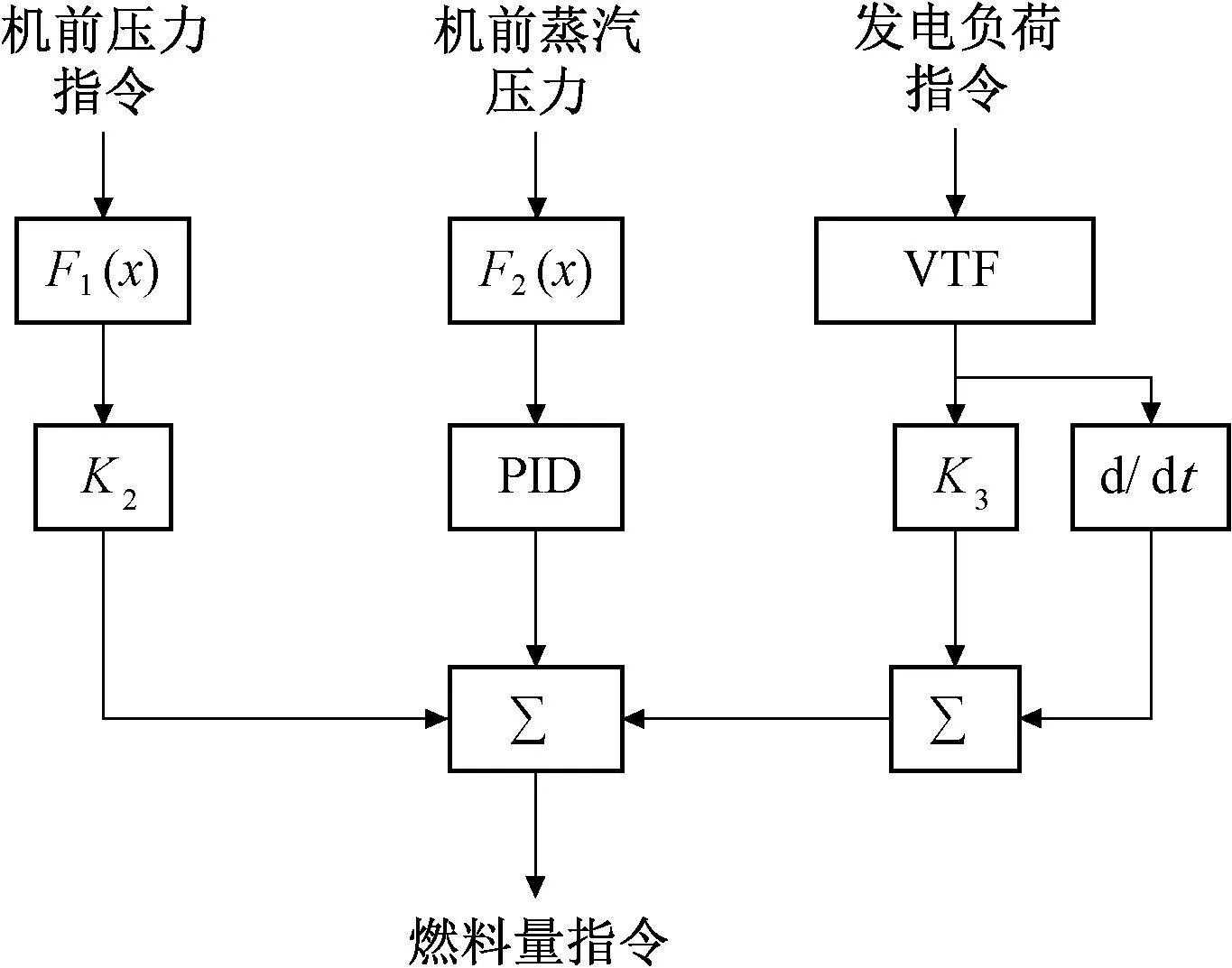
圖5 爐跟機協調控制的燃料量控制邏輯
圖5 中的VTF為可變參數濾波器,其濾波時間與原始AGC指令與限速后的AGC指令的差有關,可以實現的功能為:(1)當AGC指令大幅度正反向變化時,濾波時間大,濾波作用強,可以使前饋的微分項輸出能跟上負荷指令的變化幅度同時減小執行機構的動作速度,穩定機組運行;(2)當AGC指令小幅度快速變化時,濾波時間小,濾波作用相對較弱,此時可以在快速跟隨負荷指令的變化的同時減少變化量和變化速度,有利于穩定。
3.2 可變濾波時間濾波器及其數學分析
可變濾波時間濾波器(Variable Time Filter)的原理圖如圖6 所示,其中對于輸出信號A(k)可以用下述公式來描述:

圖6 基于VCF的燃燒指令前饋


(2)

(3)
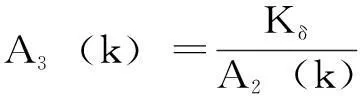
(4)
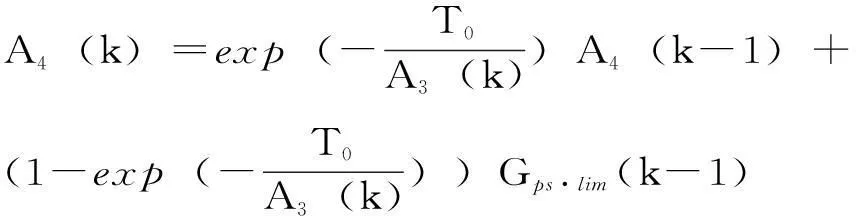
(5)

(6)
式中:Gps為負荷指令;Gps lim為經限速后的負荷指令;T0為采樣時間;c為限速環節速率限制值。
3.3 濾波器濾波特性分析
由上述分析可以得到,濾波器相當于一個時間系數可變的一階慣性環節,將其簡化為下述形式:

(7)
則其頻率特性為:


(8)
其幅頻特性:

(9)
其相頻特性:

(10)
由此可見,截止頻率與濾波時間有關,而濾波時間與負荷指令和限速后的負荷指令的差值有關。
理論上,整個協調控制系統相當于一個低通濾波器,機前壓力的變化滯后負荷變化很久,在負荷變動后,燃料在非常短的時間內波動,而機前壓力無法跟隨燃料量波動,因此可以做下列等效:(1)機前壓力的時間常數非常大,即使在燃料量前饋中加入本濾波器,機前壓力模型中的濾波時間仍起主要作用,本濾波器對其動態特性影響不大;(2)對于燃料量控制,本濾波器利用AGC指令的偏差設置濾波時間,因此當偏差為零,即AGC指令在正常速度、幅度變化時,濾波器不起濾波作用;當偏差小,即AGC指令小幅度波動時,濾波時間小,濾波作用弱,可以削弱“動態過調”引起的毛刺;當偏差大,即AGC指令大幅度波動時,濾波時間大,濾波作用強,雖然減慢了跟隨AGC的速度,但是可以控制在100s左右,對控制品質沒有明顯的影響。因此,本文中提出的濾波器可以在保證控制品質的前提下減小波動。
3.4 前饋設計方案
理論上,對于高階慣性對象,其控制器輸出變化幅度同被控變量控制品質之間存在著天然的矛盾,無論是哪種控制方案,都需要在兩者之間做出妥協。協調控制系統前饋邏輯也不例外。
運行人員在應對聯絡線模式AGC指令時總結出以下經驗[14]:(1)由于鍋爐存在一定熱慣性,在應對小幅正反變化的AGC指令時,即使不調整燃料量,壓力也不會發生太大的變化;(2)機組可以接受機前壓力同設定值存在小的偏差,對于超臨界機組壓力偏差小于±0.4MPa時,運行人員一般不干預;(3)AGC指令頻繁小幅度變化,但當其平均變化速率小于機組設定速率時,減弱前饋環節“動態過調”量,壓力也不會出現大幅的偏差。總而言之,其核心思想可歸納為“抓大放小”,即AGC指令大幅度快速單向變化時,必須保證足夠的前饋量避免機前壓力偏差過大,而AGC指令小幅度的、慢速的、不定向的變化時,則可以犧牲機前壓力穩定性,盡量避免燃料量指令出現大幅波動。
保持靜態增益部分不變,對動態微分部分進行以下處理。
(1)進行增益修正。將動態微分環節輸出信號與一增益修正系數相乘,增益修正系數在0.2~1之間,其大小由利用限幅后AGC指令與限幅限速后AGC指令之差,并考慮鍋爐蓄熱能力,經過多點折線函數F1(x)處理后得到。
(2)利用可變濾波時間的濾波器進行濾波處理,對經過增益修正后的信號再進行慣性濾波。
對于前饋微分項的輸出信號A4(k)而言,其基本等效為經歷了一個純微分環節和一個一階慣性濾波環節,其中微分環節的微分時間為T1,其大小與機組的特性有關,起到濾波的作用,濾波時間與負荷指令與限速后的符合指令的差值有關,可以隨著差值的變化自動的改變濾波時間常數,如果濾波修正增益Kδ調整的比較合適,負荷大幅度變化時,負荷指令與限速后的符合指令的差值大,相應的濾波時間就長,可以減慢回調的速度來穩定機組運行;負荷中小幅度快速變化時,負荷指令與限速后的符合指令的差值較小,相應的濾波時間就短,可以跟上負荷變化并且盡量減小回調的幅值,如圖7 所示。

圖7 改進前與改進后前饋微分項輸出
就整個協調控制系統而言,本身的動態特性也是一個低通濾波器,且濾波時間遠遠大于本文提出的非線性濾波器,所以在燃料量前饋中加入濾波器對整個系統跟隨AGC指令的整體趨勢應該沒有太大的影響,但是燃料量的波動可以減小。圖8 為整個協調系統的仿真曲線,從圖中可以對比出,當負荷升高10MW時,對應的燃料量波動減小10t,機前壓力與未改進前相差很小,機組負荷幾乎相同,對比仿真曲線可以得到如下結論:改進后與改進前的控制品質基本相同,但是燃料量的波動減小。

圖8 協調控制系統仿真
3.5 改進后仿真實驗
圖9 為改進前后AGC指令大幅變化、中等幅度變化和小幅波動時發電負荷指令前饋輸出信號。從圖中可以發現:AGC指令大幅變化時,改進后負荷指令前饋信號變化幅值和改進前接近,但是變化速率減慢,這樣有助于維持機前壓力穩定的同時減慢燃料指令的大幅快速動作;AGC指令中等幅變化時,改進后負荷指令前饋信號的幅值減小且震蕩速率減慢,減小了燃料指令的波動的同時也盡量保持住機前壓力的穩定;AGC指令小幅波動時,改進后負荷指令前饋信號波動幅值明顯變小,變化速率明顯變慢,有助于減小燃料指令波動。當然,改進后負荷指令前饋邏輯是以犧牲負荷指令小幅波動時機前壓力穩定性為代價的,但是鍋爐的蓄熱能力可以把壓力波動限制在±0.5MPa之內。

圖9 改進前與改進后前饋指令對比
圖10 為某660MW一天20時33分時至23時53分共計3小時20分的AGC指令改進前微分項的輸出信號與改進后輸出信號相對比、改進前的前饋輸出量與改進后的前饋輸出量相對比,證明了上述規律。

圖10 660 MW機組3.3 h改進前后燃料量前饋輸出
4結論
本文針對西北電網大容量機組在聯絡線調度方式下AGC指令頻繁變化造成機組燃料量大幅波動的問題,對鍋爐側發電負荷指令動態前饋邏輯輸出進行可變濾波時間系數的濾波處理,其基本原理為:當AGC指令大幅變化時,濾波時間小,負荷指令動態前饋信號大幅快速改變燃料量指令防止機前壓力大幅波動,同時減小動態回調保護機組運行安全;當AGC指令小幅變化時,濾波時間大,負荷指令動態前饋信號小幅慢速變化,防止燃料量指令變化幅度大。通過仿真算例證明了該方法的正確性,并且在西北電網一臺660MW的機組中取得了良好的效果,改善了燃燒指令前饋因復雜AGC指令而造成的“動態回調”問題。
參考文獻:
[1]王松巖,于繼來.含大規模風電系統的非AGC與AGC機組高峰協調控制策略[J].中國電機工程學報,2013,33(7):156-163,前插20.
[2]向德軍,陳根軍,顧全,等. 基于實測煤耗的AGC電廠負荷優化分配[J]. 電力系統自動化,2013,37(13):125-129.
[3]王瑞琪,劉吉臻,高萌,等.火電機組AGC指令特性分析[J].華北電力大學學報(自然科學版),2013,40(5):84-89.
[4]韓忠旭,齊小紅,孫穎. 采用模擬模糊柔性預給煤控制提高AGC相應速率的方法及其應用[J].電網技術,2006,30(增刊):1-6.
[5]張建生,曾德良,趙征,等. 協調控制系統能量指令及參數整定分析[J]. 華北電力大學學報,2002,29(4):60-64.
[6]張秋生,梁華,胡曉花,等. 超超臨界機組的兩種典型協調控制方案[J]. 中國電力,2011,44(10):74-79.
[7]顏 偉,趙瑞鋒,趙霞,等. 自動發電控制中控制策略的研究發展綜述[J]. 電力系統保護與控制,2013,(8):149-155.
[8]侯子良,侯云浩. 推動廠級監控信息系統中優化負荷分配功能的應用[J]. 中國電力,2005,38(6):50-52.
[9]胡軼群. 直接能量平衡協調控制系統在600MW機組的應用[J]. 電力科學與工程,2013,29(4):74-78.
[10]伍宗偉,姚敏立,馬紅光,等. 稀疏網格平方根求積分非線性濾波器[J]. 電子學報,2012,40(7):1298-1303.
[11]徐晨靜,田亮,張銳鋒,等. 一種非線性微分在協調控制系統中的應用[J]. 電力科學與工程,2014,30(11):41-46.
[12]陳彥橋,鄭亞鋒,劉吉臻,等. 基于動態解耦的模糊多模型協調控制系統應用研究[J]. 中國電機工程學報,2006,26(12):166-170.
[13]李露;劉吉臻,項丹. 基于穩定逆的直流爐機組協調控制系統前饋-反饋控制[J]. 動力工程學報,2015,35(1):31-36,82.
[14]謝謝.基于電網AGC性能指標的單元機組協調控制系統研究[D].北京:華北電力大學,2012.
[15]蘭曉華, 李慶,張軍峰. 石電330MW機組協調控制系統優化[J]. 電力科學與技術學報,2010,25(3):98-102.
AnApplicationofNonlinearFilterintheFeed-forwardControlofCoordinatedControlSystem
WangTong,TianLiang
(SchoolofControlandComputerEngineering,NorthChinaElectricPowerUniversity,Baoding071003,China)
