刮板輸送機系統機電耦合模型及仿真分析
2016-01-28 03:08:50王海艦劉占勝
中國機械工程 2015年23期
張 強 王海艦 毛 君 劉占勝
1.遼寧工程技術大學,阜新,1230002.大連理工大學工業裝備結構分析國家重點實驗室,大連, 1160233.中國煤礦機械裝備有限責任公司,北京,100011
?
刮板輸送機系統機電耦合模型及仿真分析
張強1,2王海艦1毛君1劉占勝3
1.遼寧工程技術大學,阜新,1230002.大連理工大學工業裝備結構分析國家重點實驗室,大連, 1160233.中國煤礦機械裝備有限責任公司,北京,100011
摘要:根據刮板輸送機機械系統與控制系統之間的耦合關系,推導出刮板輸送機的非線性狀態空間機電耦合方程,采用MATLAB/Simulink模塊建立刮板輸送機的仿真模型,對刮板輸送機系統的機電耦合動力學問題進行仿真和研究;采用等效變化載荷質量分析刮板輸送機在空載啟動、平穩運行、載荷突增以及卡鏈工況下的刮板鏈速度、電磁轉矩的特性曲線,得到了啟動時兩鏈輪的轉角曲線。結果表明,驅動鏈輪與從動鏈輪啟動時轉角差約為85°,從動鏈輪啟動旋轉較驅動鏈輪滯后約0.8 s。研究結果為研究刮板輸送機不同工況、載荷下的轉矩、速度變化以及計算鏈輪張緊度提供了理論和數值依據。
關鍵詞:刮板輸送機;機電耦合;刮板鏈速度;電磁轉矩;轉角
Electromechanical Coupling Modeling and Simulation Analysis of Scraper Conveyor System
0引言
刮板輸送機是綜采工作面的重要輸送動力裝置,采用鏈傳動原理通過刮板鏈實現負載和運輸,具有結構緊湊、強度高以及可連續輸送等優點,同時還可以根據截割情況隨工作面向前推進[1]。刮板輸送機在負載運輸過程中需要克服很大的滑動摩擦阻力,而且不同位置的負載差異很大,尤其是煤壁片幫或有大塊煤巖落下時,會對刮板鏈造成很大的沖擊,甚至會導致刮板鏈卡死[2]。因此,針對不同工況下刮板輸送機的動力學特征進行分析和預測,有利于進一步優化和改進刮板輸送機的性能,延長整機的使用壽命。
近年來,許多學者對刮板輸送機的動力學相關問題進行了大量研究。毛君等[3]、張強等[4]建立刮板輸送機非線性、時變性、動力耦合的有限元模型,對刮板輸送機不同工況下的動力學問題進行了分析研究;何柏巖等[5]將圓環鏈傳動系統離散成Kelvin-Vogit模型后采用MATLAB/Simulink建立系統的動力學仿真模型,對刮板輸送機的滿載啟動、自由停機和卡鏈工況進行動力學仿真計算;劉廣鵬等[6]、焦紅章等[7]建立了基于ADAMS的刮板輸送機鏈傳動系統虛擬樣機模型,對其在啟動、制動、額定工作和異常載荷各種工況下的動力學特性進行了分析。考慮到驅動電機性能對整個刮板輸送機系統動力學的影響,本文采用機械系統和電機系統耦合的方法對刮板輸送機系統進行建模和動力學仿真分析,最大程度地等效刮板輸送機的機電系統,保證仿真數據結果的準確性[8]。
1刮板輸送機機電耦合數學模型
1.1刮板輸送機機械系統數學模型
刮板輸送機的鏈傳動系統是一個閉合的連續體,上邊鏈為負載鏈,下邊鏈為無載鏈。刮板鏈在負載過程中,要克服很大的摩擦阻力,承受非常大的動載荷和靜載荷,因此刮板鏈同時具有黏性和彈性兩個動力特性[9],根據刮板輸送機的結構特性和動力特性,構建其系統的簡化等效模型如圖1所示。刮板輸送機系統運動模型含驅動鏈輪轉角θ1、從動鏈輪轉角θ2以及等效質量位移x三個自由度。
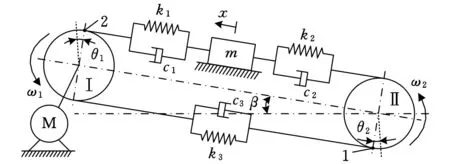
圖1 刮板輸送機系統簡化等效模型
根據等效模型可得
(1)
Ff=mg(μcosβ+sinβ)
因此得到機械系統的運動微分方程為
(2)
式中,m、k1、k2、k3、c1、c2、c3分別為等效載荷質量、圓環鏈的剛度和阻尼;μ為當量摩擦因數,取值0.835[10];β為刮板輸送機的鋪設傾角,根據現場刮板輸送機實際鋪設工況取值為8°;θ1、θ2分別為驅動鏈輪和從動鏈輪的轉角位移;r為鏈輪半徑;Jm1和Jm2分別為電機轉子、減速齒輪、鏈輪以及圓環鏈等等效在兩個鏈輪上的轉動慣量;n為減速齒輪的傳動比;Te為電磁轉矩;g為重力加速度,本文取9.8 m/s2。
1.2刮板輸送機電機系統建模
刮板輸送機的負載能力和輸送能力與其自身的電機拖動調速系統性能密切相關,本文以某礦區綜采工作面使用的SGB620/40T刮板輸送機為例,其驅動電機額定功率為40 kW,主要技術參數如表1所示,采用矢量控制實現系統調速的方法對刮板輸送機的控制系統進行建模仿真分析。
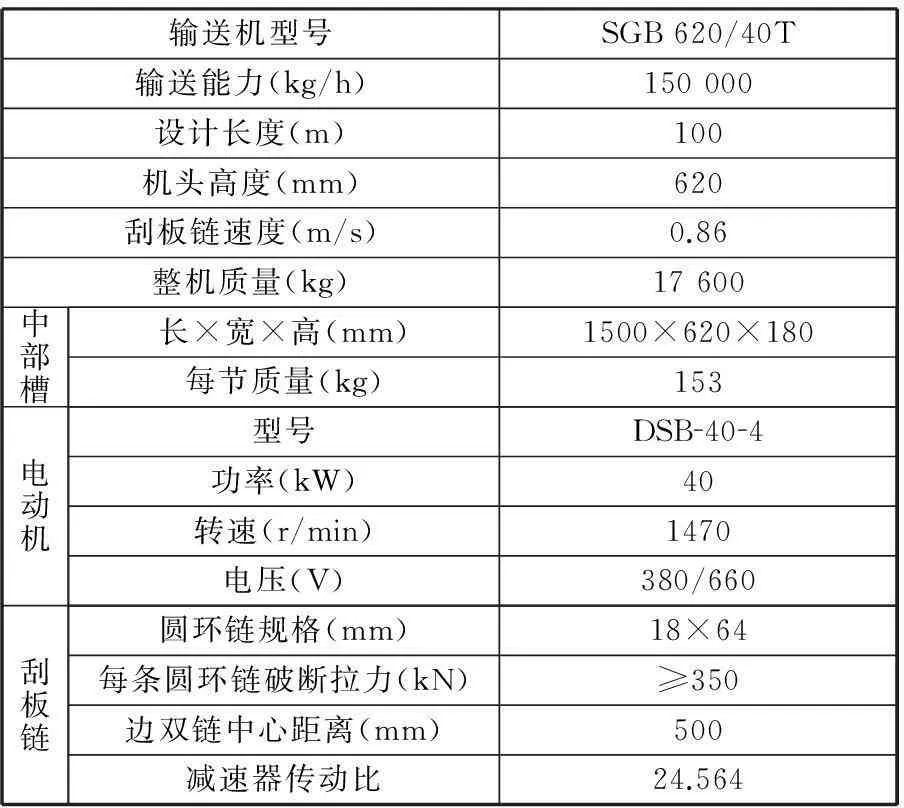
表1 SGB620/40T型刮板輸送機主要技術參數
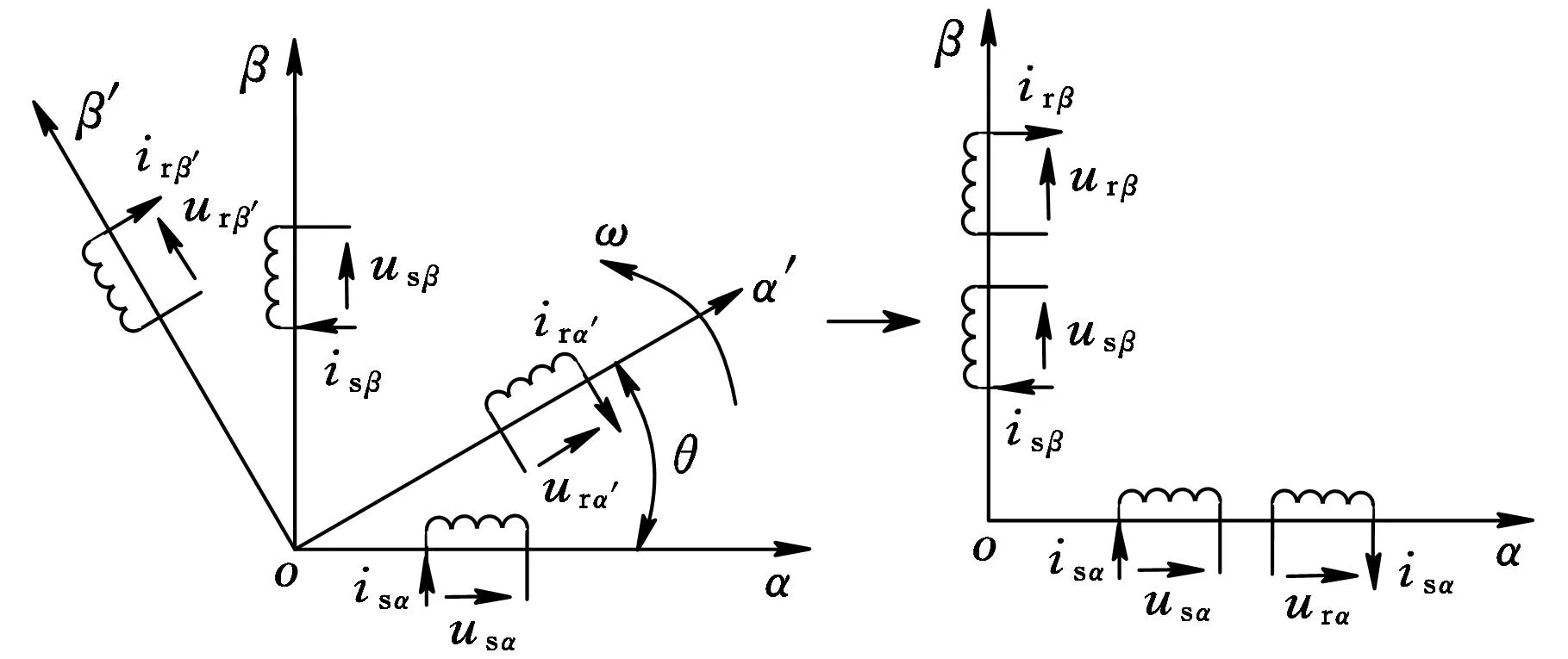
圖2 定子、轉子坐標系變換為靜止兩相正交坐標系原理圖
異步電機的動態數學模型是一個高階、非線性、強耦合的多變量系統,為了減少電機系統建模過程中狀態變量的維數,采用定轉子繞組3/2變換方法將三相繞組等效為互相垂直的兩相繞組,消除定轉子三相繞組間的相互耦合,簡化定子和轉子的自感矩陣,其轉換原理如圖2所示。再將轉子坐標系由旋轉正交坐標系變換到靜止兩相坐標系,用靜止的兩相轉子正交繞組等效代替原先轉動的兩相繞組[11-12],得到靜止兩相正交坐標系中的電壓方程、磁鏈方程和電磁轉矩方程分別為
(3)
(4)
Te=npLm(is βir α-is αir β)
(5)
式中,下標α、β分別表示d、q軸的分量;s、r分別表示定子、轉子上的量;Lm為定轉子互感;u、i、R、L、ψ分別為電壓、電流、電阻、電感及磁鏈;ωr為轉子角速度;np為極對數;p為微分算子。
1.3機電耦合系統數學模型
機械系統和控制系統的關聯性是構建機電耦合系統的重要前提[13-14],運動微分方程式(2)與電磁轉矩方程式(5)通過電磁轉矩Te構成刮板輸送機機電系統的耦合關系,刮板輸送機機電耦合系統構成框圖見圖3。
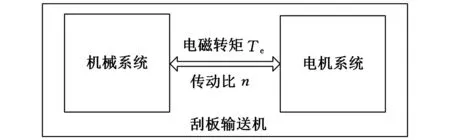
圖3 刮板輸送機機電耦合系統構成框圖
分別取下列M值等式:
(6)
則根據式(1)~式(6)可計算推導出刮板輸送機的非線性狀態空間機電耦合方程:
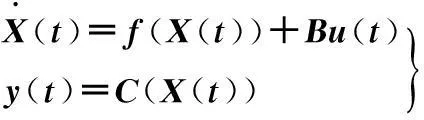
(7)
B=

f(X(t))=
(8)
2機電耦合系統建模仿真
基于MATLAB/Simulink的刮板輸送機機電耦合系統仿真模型如圖4所示,整個系統由速度控制器ASR,兩相、三相電流相互轉換模塊,電流滯環控制逆變器模塊,三相異步交流電動機,等效載荷質量m模塊和機械系統模型mechanical system模塊組成[15]。
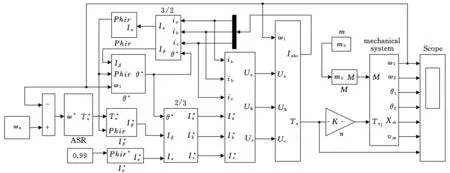
圖4 刮板輸送機機電耦合系統仿真模型
考慮到系統仿真的多工況性,針對等效載荷質量設計了等效變載輸出模塊M,同時在mechanical system模塊中設置了卡鏈工況下的載荷邊界條件。系統模型各項參數以SGB620/40T型刮板輸送機為例。鏈輪的半徑r=100 mm,通過等效計算得到主從動鏈輪的轉動慣量Jm1和Jm2的值分別為1.425×107kg·mm2和2.68×105kg·mm2。驅動電機為DSB-40-4型隔爆型三相異步電動機。對刮板輸送機在不同工況下的動力學特性進行仿真分析,得到額定載荷啟動時驅動鏈輪與從動鏈輪的轉角曲線以及空載啟動、平穩運行、載荷突增和卡鏈工況時的電磁轉矩及刮板鏈速度曲線如圖5~圖8所示。
刮板輸送機額定載荷啟動時,驅動鏈輪在電動機作用下開始旋轉并帶動刮板鏈,克服刮板鏈的張力及刮板與中部槽的摩擦阻力帶動傳動鏈輪,因此從動鏈輪的轉動相對滯后于驅動鏈輪。由圖5可知,驅動鏈輪與從動鏈輪的轉角差約為85°,轉動滯后時間為0.8 s,說明驅動鏈輪克服張力和阻力帶動從動鏈輪用了0.8 s的時間,在此期間驅動鏈輪轉過了85°的轉角。
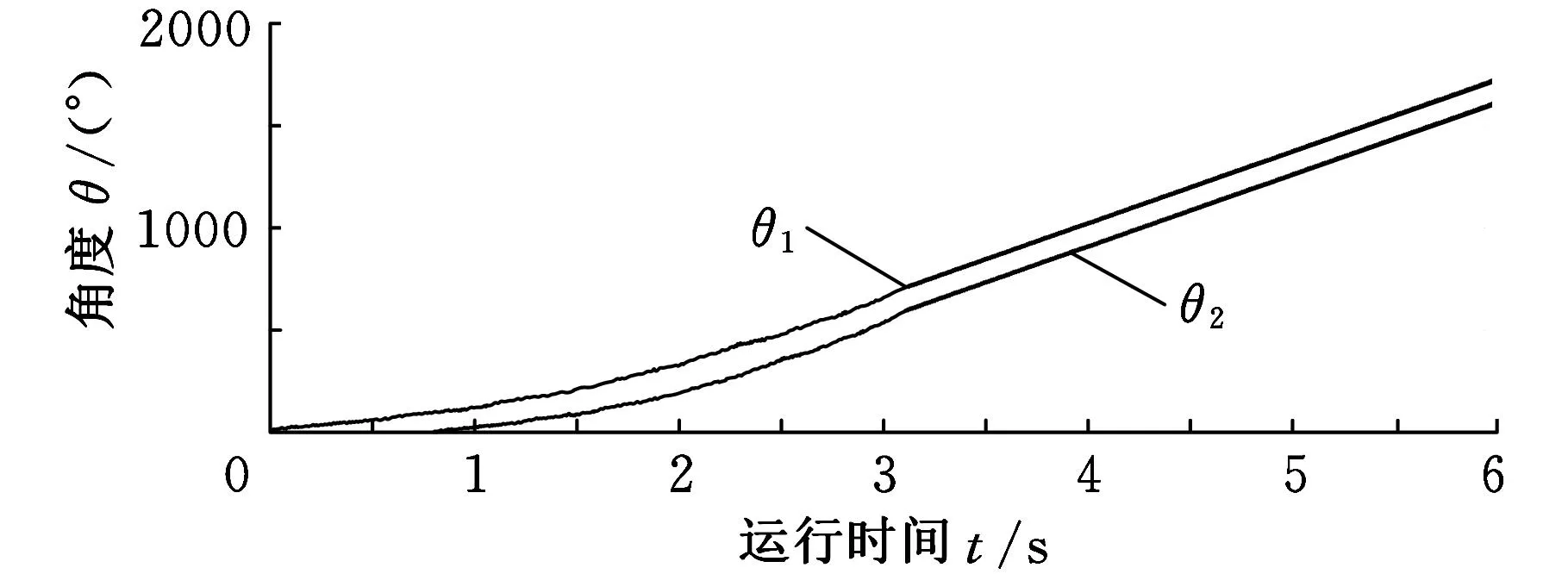
圖5 額定載荷啟動時兩鏈輪的轉角曲線
由圖6可以看出,電機在啟動瞬間電磁轉矩快速達到峰值,之后隨速度的增大不斷減小,并伴隨有局部劇烈震蕩,最后于3.2 s時與刮板鏈速度一起趨于穩定,完成啟動過程,進入平穩運行階段。
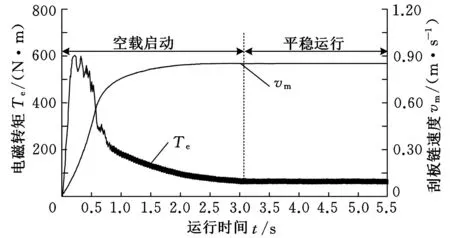
圖6 空載啟動及平穩運行時電磁轉矩及刮板鏈速度曲線
圖7所示為模擬刮板鏈在輸送過程中受到煤壁片幫或大塊煤巖的沖擊導致負載突變,即等效載荷質量m取較大值但未達到卡鏈邊界條件時的情況,此時未造成刮板鏈的卡死,電機在非常短的時間內輸出較大電磁轉矩以滿足輸送負載的需要;刮板鏈的轉速由于電磁轉矩的快速調整,所受的影響較小,經過微小波動后快速恢復平穩鏈速,整個波動過程僅僅歷時0.2 s。
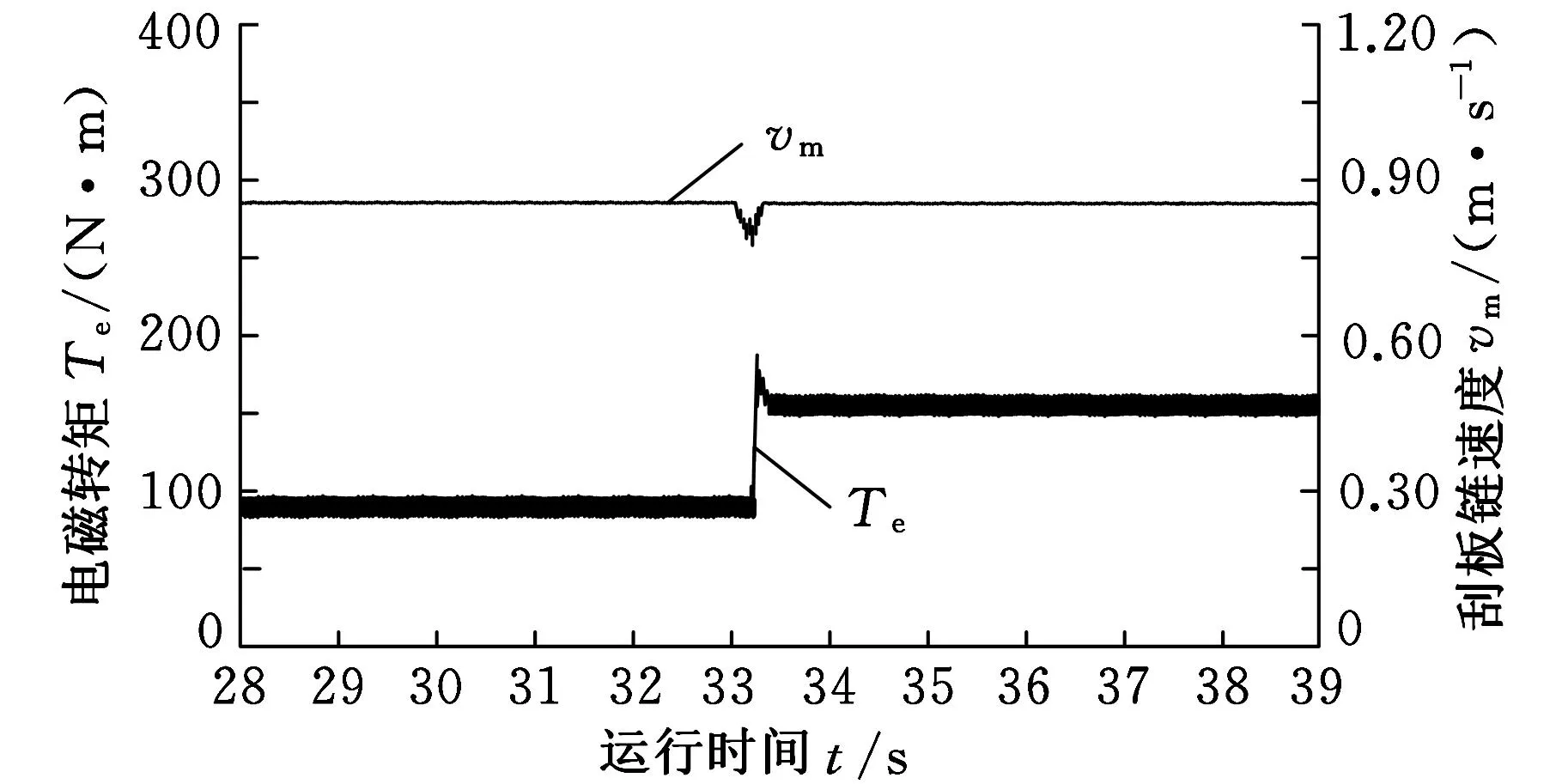
圖7 載荷突增時電磁轉矩及刮板鏈速度曲線
繼續增大等效載荷質量m,模擬仿真卡鏈工況下的電磁轉矩及刮板鏈的速度,如圖8所示。當刮板鏈上的載荷過大而發生卡鏈時,刮板鏈速度快速降低并趨于停止,此時電機電磁轉矩快速增大,增大鏈輪轉矩來驅動刮板鏈運動,在此過程中電磁轉矩產生劇烈震蕩,刮板鏈速度在趨于0時產生微小波動,最后由于卡鏈停機致使速度歸0,電機電磁轉矩快速下降至0,整個卡鏈驅動至停機過程持續近1.5 s。
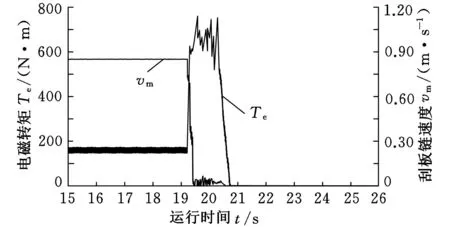
圖8 卡鏈工況下電磁轉矩及刮板鏈速度曲線
3實驗驗證
為校驗刮板輸送機機電耦合系統模型的合理性與準確性,依據刮板每次經過鏈輪時張力突變的原理,現場對關于刮板輸送機中心對稱的兩個刮板(圖1中節點1與節點2位置所示)進行開槽、布線結構改造,將數據檢測裝置及電源放置在刮板左右兩側的空腔內,將與刮板嚙合的兩平環外側銑平后粘貼應變片并做保護處理,使刮板與鏈環準確嚙合。應變片的布置方法及現場實際安裝測試圖分別見圖9和圖10。

圖9 刮板鏈環嚙合處應變片的布置方法

圖10 現場安裝及測試圖片
測試前,將帶有應變片的兩個刮板調整至圖1所示節點1與節點2兩個嚙合節點的前部,以刮板輸送機啟動作為檢測起始點,得到刮板張力應變與運行時間曲線如圖11所示。由圖11可知,額定載荷啟動后,節點2處載有應變片的刮板經過約0.06 s與驅動鏈輪實現嚙合,嚙合瞬間產生張力突變,產生0.0009的一個應變峰值;而節點1處載有應變片的刮板在啟動后約0.82 s時與從動鏈輪實現嚙合,造成張力突變,產生一個與節點2處接近的應變峰值。兩節點處產生張力突變的間隔時長為0.755 s,此段時差即為從動鏈輪較驅動鏈輪開始轉動的滯后時間,與仿真結果基本一致,微小誤差可能由于現場復雜的實際工況或外部擾動所引起,在允許范圍內,由此證明了刮板輸送機機電耦合模型的等效性與可靠性。
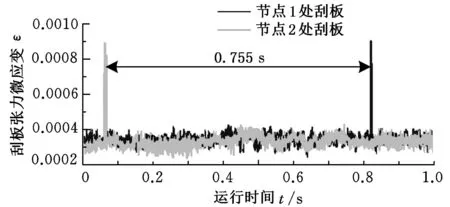
圖11 刮板鏈環張力應變實時檢測曲線
4結論
(1)建立了刮板輸送機的機械動力學微分方程和電機系統的數學模型,根據刮板輸送機機械系統和電機系統的耦合關系,推導出刮板輸送機的非線性狀態空間機電耦合方程。
(2)采用MATLAB/Simulink模塊構建刮板輸送機機電耦合系統的仿真模型,分析了額定載荷啟動時兩鏈輪的轉角曲線,得到了驅動鏈輪與從動鏈輪的啟動轉角差和從動輪轉動的滯后時間,并通過現場實驗測試對仿真結果進行驗證,結果表明,仿真結果與實測數據基本吻合,從而為分析刮板輸送機的張緊力提供了數值基礎。
(3)對刮板輸送機在空載啟動、平穩運行、載荷突變以及卡鏈工況下的刮板鏈速度、電磁轉矩特性曲線進行仿真分析,得到了刮板輸送機在不同工況下的動力學特性,為進一步優化和改進刮板輸送機提供了重要的依據。
參考文獻:
[1]謝苗,毛君,許文馨.重型刮板輸送機故障載荷工況與結構載荷工況的動力學仿真研究[J].中國機械工程,2012,23(10):1200-1204.
Xie Miao, Mao Jun, Xu Wenxin. Dynamics Simulation of Heavy Scraper Conveyor in Working Condition of Failure-load and Structural Load[J]. China Mechanical Engineering,2012,23(10): 1200-1204.
[2]張強,付云飛,胡南.礦用V型鎖式接鏈環卡鏈沖擊狀態下的動態特性研究[J]. 合肥工業大學學報(自然科學版), 2013,36(4):401-405.
Zhang Qiang, Fu Yunfei, Hu Nan. Study of Dynamic Characteristic of Mining V-Lock Chain Ring under Impact Load Caused by Stuck Chain[J]. Journal of Hefei University of Technology (Natural Science), 2013, 36(4): 401-405.
[3]毛君,師建國,張東升,等.重型刮板輸送機動力建模與仿真[J].煤炭學報,2008, 33(1):103-106.
Mao Jun, Shi Jianguo, Zhang Dongsheng, et al. Dynamic Modeling and Simulation of Heavy Scraper Conveyor[J].Journal of China Coal Society, 2008, 33(1): 103-106.
[4]張強,付云飛,聶國強.動載荷下的V鎖式接鏈環力學特性研究[J].機械設計,2013,30(11):13-16.
Zhang Qiang, Fu Yunfei, Nie Guoqiang. Study of Mechanical Properties of V-lock Chain Ring under Dynamic Load[J]. Journal of Machine Design, 2013, 30(11): 13-16.
[5]何柏巖,孫陽輝,聶銳,等.礦用刮板輸送機圓環鏈傳動系統動力學行為研究[J].機械工程學報,2012,48(17):50-56.
He Baiyan, Sun Yanghui, Nie Rui, et al. Dynamic Behavior Analysis on the Ring Chain Transmission System of an Armoured Face Conveyor[J]. Journal of Mechanical Engineering, 2012, 48(17): 50-56.
[6]劉廣鵬,王學文,楊兆建,等.刮板輸送機鏈傳動系統動力學特性分析[J].機械傳動,2014,38(7):115-118.
Liu Guangpeng,Wang Xuewen, Yang Zhaojian, et al. Dynamics Characteristic Analysis of Chain Transmission System of Scraper Conveyer[J]. Journal of Mechanical Transmission, 2014, 38(7): 115-118.
[7]焦紅章,楊兆建,王淑平.刮板輸送機鏈輪傳動系統接觸動力學仿真分析[J].煤炭學報,2012,37(2):494-498.
Jiao Hongzhang,Yang Zhaojian,Wang Shuping.Contact Dynamics Simulation Analysis for Sprocket Transmission System of Scraper Conveyor[J].Journal of China Coal Society, 2012,37(2):494-498.
[8]林利紅,陳小安,周超群,等.精密傳動系統的機電耦合建模及仿真分析[J].重慶大學學報(自然科學版),2007,30 (11):14-18.
Lin Lihong,Chen Xiao’an,Zhou Chaoqun,et al.Modeling and Simulation Analysis of the Electromechanical Coupling Facts about Precision Transmission System[J].Journal of Chongqing University(Natural Science Edition),2007,30(11):14-18.
[9]毛君,張東升,師建國.刮板輸送機張力自動控制系統的仿真研究[J].系統仿真學報,2008,20(16):4474-4476.
Mao Jun, Zhang Dongsheng, Shi Jianguo. Simulation Research of Tension Automatic Control System of Scraper Conveyor[J]. Journal of System Simulation,2008,20(16):4474-4476.
[10]徐廣明,楊偉紅.刮板輸送機運行阻力計算分析[J].煤礦機械,2009,30(1):3-5.
Xu Guangming,Yang Weihong. Analysis of Scraper Conveyor Running Resistance[J].Coal Mine Machinery,2009,30(1):3-5.
[11]樊揚,瞿文龍,陸海峰,等.基于轉子磁鏈q軸分量的異步電機間接矢量控制轉差頻率校正[J].中國電機工程學報,2009,29(9):62-66.
Fan Yang, Qu Wenlong, Lu Haifeng,et al.Slip Frequency Correction Method Base on Rotor FluxqAxis Component for Induction Machine Indirect Vector Control System[J]. Proceedings of the CSEE, 2009,29(9):62-66.
[12]王毅,馬洪飛,趙凱岐,等.電動車用感應電機磁場定向矢量控制研究[J].中國電機工程學報,2005,25(11):113-117.
Wang Yi, Ma Hongfei,Zhao Kaiqi,et al.Field-oriented Vector Control of Induction Motor for Electric Vehicles[J].Proceedings of the CSEE, 2005,25(11):113-117.
[13]孟杰,陳小安,合燁.高速電主軸電動機-主軸系統的機電耦合動力學建模[J].機械工程學報,2007,43(12):160-165.
Meng Jie, Chen Xiao’an,He Ye.Electromechanical Coupled Dynamical Modeling of High Speed Motorized Spindle’s Motor-spindle Subsystem[J]. Journal of Mechanical Engineering,2007, 43(12): 160-165.
[14]盧秉恒,趙萬華,張俊,等.高速高加速度下的進給系統機電耦合[J].機械工程學報,2013,49(6):2-11.
Lu Bingheng, Zhao Wanhua,Zhang Jun,et al. Electromechanical Coupling in the Feed System with High Speed and High Acceleration[J]. Journal of Mechanical Engineering,2013,49(6):2-11.
[15]王向紅,朱昌明,楊廣全,等.電梯系統機電耦合模型仿真研究[J].系統仿真學報,2007,19(10):2328-2331.
Wang Xianghong, Zhu Changming, Yang Guangquan,et al.Simulation for Electromechanical Coupling Model of Elevator Systems[J].Journal of System Simulation,2007,19(10):2328-2331.
(編輯蘇衛國)

Zhang Qiang1,2Wang Haijian1Mao Jun1Liu Zhansheng3
1.Liaoning Technical University,Fuxin,Liaoning,123000
2.State Key Laboratory of Structural Analysis for Industrial Equipment,
Dalian University of Technology,Dalian,Liaoning,116023
3.China National Coal Mining Equipment Co.,Ltd.,Beijing,100011
Abstract:According to the coupling relationship between the mechanical system and control system of scraper conveyor, the nonlinear state space electromechanical coupling equations were derived for scraper conveyor, the simulation model of the scraper conveyor was established by using MATLAB/Simulink module, the electromechanical coupling dynamics of the scraper conveyor system was studied, the equivalent load change of mass was used to analyse the scraper conveyor’s scraper chain speed and electromagnetic torque characteristic curves in no-load start, stable operation, load surge and card chain condition.Two sprockets’ angle curves were obtained at startup, the results show that, the start angle difference between drive sprocket and the driven sprocket is about 85°, the driven sprocket lag about 0.8 s than that of drive sprocket when it rotates.It is provided the theoretical and numerical basis for studying scraper conveyor’s torque,speed change and calculation of sprocket’s pretension in different working conditions and loads.
Key words:scraper conveyor; electromechanical coupling; scraper chain speed; electromagnetic torque; angle
基金項目:國家高技術研究發展計劃(863計劃)資助項目(2013AA06A412);高等學校博士學科點專項科研基金資助項目(20132121120011);工業裝備結構分析重點實驗室開放基金資助項目(GZ1402);遼寧省高等學校杰出青年學者成長計劃資助項目(LJQ2014036)
收稿日期:2015-02-04
中圖分類號:TP273DOI:10.3969/j.issn.1004-132X.2015.23.003
作者簡介:張強,男,1980年生。遼寧工程技術大學機械工程學院教授、博士研究生導師,大連理工大學工業裝備結構分析國家重點實驗室訪問學者。研究方向為礦山機械動態設計及監測技術。獲省部級科研獎勵16項。發表論文60余篇。 王海艦,男,1987年生。遼寧工程技術大學機械工程學院博士研究生。毛君,男,1960年生。遼寧工程技術大學機械工程學院教授、博士研究生導師。 劉占勝,男,1958年生。中國煤礦機械裝備有限責任公司高級工程師。
