基于霍爾脈沖和機械功率的電動車窗防夾控制
2016-02-23 06:33:50唐希雯吳世龍艾晨晨
計算機技術與發展 2016年8期
關鍵詞:汽車
唐希雯,吳世龍,董 瑞,艾晨晨
(1.電子工程學院 雷抗系,安徽 合肥 230037;2.合肥工業大學 汽車工程技術研究院,安徽 合肥 230009)
圖1 電樞的簡化電路和電機軸的剛體模型
基于霍爾脈沖和機械功率的電動車窗防夾控制
唐希雯1,吳世龍1,董 瑞1,艾晨晨2
(1.電子工程學院 雷抗系,安徽 合肥 230037;2.合肥工業大學 汽車工程技術研究院,安徽 合肥 230009)
為避免由于機械摩擦的變化和機械傳動的間隙而造成電機電流不連續產生的誤判,提出電機霍爾脈沖信號檢測與機械功率計算相結合的汽車電動車窗防夾控制策略。檢測電機霍爾脈沖信號并判別車窗玻璃是否運行至防夾區和上限位,然后計算電機的機械功率實現對車窗障礙物的準確判斷;在計算汽車電動車窗傳動系統重要參數和建立永磁直流電機驅動車窗運動模型的基礎上,基于MATLAB/Simulink建立汽車電動車窗防夾系統模型并進行仿真。結果表明:基于電機霍爾脈沖信號檢測與機械功率計算相結合的電動車窗防夾控制策略可準確檢測車窗防夾區域,有效地避免了誤夾事故的發生,提升了汽車的安全性。
汽車電動車窗防夾;霍爾脈沖信號;機械功率;防夾區域
0 引 言
汽車電動車窗在現代汽車上大規模普及使用,提高了汽車的操作方便性和行車的安全性[1]。但汽車電動車窗也存在一定的危險性,在車窗上升時易發生夾持傷害事故,危害身體和生命安全。據公益組織“兒童與汽車”的調查統計報告,從1995年至2015年,至少36名兒童因電動車窗事故死亡。同樣的,根據1997年美國國家統計局公布的資料顯示,每年醫院接收被電動車窗夾傷的人數不少于500人,超過一半是兒童[2]。為了保障乘客的人身安全,需要研究汽車電動車窗防夾控制技術[3-5]。作為安全系統中重要的一種,電動車窗防夾系統已經被國際上越來越多的廠家認可并廣泛使用[6]。歐美發達國家也出臺了一些相應的法規,如歐洲的74/60/EEC、美國的MVSS118,把防夾電動車窗作為汽車的一種標準配置,提升了行車安全和人性化操作感[7]。
目前汽車電動車窗防夾控制基本都是采用檢測電機電流的方法來判斷汽車車窗是否遇到障礙物[4]。由于車窗機械摩擦的變化和機械傳動的間隙會造成電機電流的間斷而產生誤判斷[7-10],文中采用電機霍爾脈沖信號檢測與電機機械功率計算相結合的汽車電動車窗防夾控制策略,有效提高了障礙物檢測的準確率。
1 電動車窗防夾工作原理
汽車電動車窗防夾,就是指在汽車車窗上升進程中遇到障礙物,夾住障礙物且達到一定力度以后,使車窗自行停止或下降,以防人或物體被夾住。汽車電動車窗防夾需要解決車窗對障礙物靈敏度與夾持力度之間的制約關系,以保證在實現車窗防夾的同時,不影響電動車窗正常的升降功能[8]。
1.1 電動車窗系統組成
電動車窗防夾控制系統有以下幾個主要組成部分:直流電機、減速器、旋轉—線運動變換裝置、車窗滑道和相關橡膠構件—呢槽以及橡膠條[11-13]。
(1)直流電機。
直流電機直接關系到電動玻璃升降器能否正常工作,所以它要求具有個頭小、質量低、防護等級高、低噪聲、電磁干擾小、運行可靠等特點,同時還要有優良的防水、耐久、耐熱、耐腐蝕、耐振動、不易燃燒等性能[14]。
(2)蝸輪蝸桿減速器。
由于電機本身的轉速太高,不適合直接用于驅動車窗升降系統,所以這里需要減速器將電機的轉速降到一定范圍。此處減速比設為70:1,即電機轉子每轉過一周,從動輪只旋轉1/70周[3,15]。
(3)卷揚輪。
卷揚輪可以把旋轉運動轉化成直線運動,然后通過鋼絲或鋼纜與減速器連接,從而牽引車窗在滑道上完成升降運動[15]。
(4)控制器。
控制器通過輸出控制信號控制不同繼電器的開關來實現電機的正反轉驅動,從而使車窗升降。
1.2 電動車窗防夾區
電動車窗的防夾區為電動車窗無障礙上升至最大位置時距最頂端為4~200 mm的區域。該定義符合歐洲74/60/EEC和美國FMVSS118法規的相關要求[16-17]。
1.3 電動車窗防夾力
定義防夾區域之后,還應對防夾力設定一個約束值。這里采用歐洲74/60/EEC和美國FMVSS118標準,當電動車窗自動上升過程中在防夾區域內遇到超過100 N的阻力時,防夾功能應該起作用,保守防夾力歐標規定80 N,美標規定85 N[3]。
1.4 電動車窗防夾強度
(1)強度的定義:車窗上升時抵抗阻力的能力[15]。
(2)強度計算:QF=L。其中,L為單位長度;F為車窗所遇阻力。
(3)強度的人性化含義:電動車窗防夾系統不僅要有防夾功能,更應該站在使用者的立場做人性化的考慮。如果車窗在把人的手、頭或其他部位夾疼甚至夾傷才采取防夾措施,那么防夾功能就失去了最初的設計意義[15]。
2 電動車窗傳動系統運動學模型
2.1 車窗電機的電路方程和機械方程
(1)
(2)
(3)
(4)

2.2 拉普拉斯變換表達式

(5)
(6)
(7)
(8)
2.3 車窗電機的機械輸出端
Te=TL+T0
(9)
(10)

(11)
通過拉普拉斯變換,得到:

(12)
(13)
將上述直流電機電樞回路方程與機械動力回路方程合并,可得
(14)
2.4 電動車窗傳動系統結構和固定參數計算
傳動系統由減速器、蝸輪蝸桿和卷揚輪組成[8-9,18-19]。實驗用電動車窗傳動系統主動輪齒數Z1=1;從動輪齒數Z2=70;傳動比K=Z2/Z1=70;電動車窗蝸輪蝸桿傳動機械效率η2=0.4;卷揚輪半徑r=0.025 5m;鋼絲繩卷揚輪效率η3=0.8;窗滑軌效率η4=0.8。
2.5 電動車窗動力及運動系統相關參數計算
實驗用電機電感均值L=1.5mH,電樞阻值R=0.677 Ω,電源電壓U=13.5 V,馬達電流I=3.2 A,電機空載轉速Nmax=7 214 r/min,電機效率η1=0.69,電機空載電流I0=20.8 A,電機堵轉電流數值Is=0.497 A。
則:電機輸入功率P1=UI=43.4W,電機的輸出功率P2=P1η1=30.1W,蝸輪功率P3=P1η1η2=12W,卷揚輪上的鋼纜及車窗升降線速v1=2πN2r/60=0.24 m/s,車窗提升力F1=T2η2/r=40.1 N[15]。
(2)車窗傳動系統轉矩和轉速。
傳動系統輸出轉矩為:
蝸輪及卷揚輪扭矩為:
T2=T1Kη2=1.29 N·m
傳動系統電機轉速為:
蝸輪及卷揚輪轉速為:
但在綜合考量了公司的整體情況后,盧春泉認為外部資金的注入對公司發展有利,因此在董事會上投了贊成票。最終,董事會一致通過此次融資方案。
通過計算電動車窗傳動系固有參數以及分析建立的運動學模型可以得出:
(1)電動車窗升降系統是由永磁直流電機作為驅動源,通過卷揚輪和減速器的作用實現增大車窗提升力矩和降低車窗升降速度的傳動系統;
(2)可以通過選用的電動車窗電機的主要關鍵參數,推導出對應的電路方程和機械運動方程,建立可進行汽車電動車窗防夾理論和仿真分析計算的系統仿真模型,為進一步的防夾控制策略建立和驗證提供條件。
3 考慮機械功率計算的電動車窗防夾控制
3.1 電動車窗防夾區檢測
電動車窗的升降是通過控制電機的旋轉,經過蝸輪蝸桿機構進行降速增扭后,再通過卷揚輪使電機的旋轉運動轉換為車窗的直線升降運動[7]。在電動車窗升降過程中,由于升降速度正比于電機轉軸的轉動速度,可以利用霍爾傳感器將電機轉動生成相應方波脈沖信號并傳輸給電動車窗的控制器采集端口供采集。另外,電動車窗準確位置的確定,首先需要確定位置標定的基準值,具體方法如下:
通過電動車窗控制器的捕獲端口對霍爾傳感器的輸出方波脈沖信號進行捕獲,捕獲從電動車窗在最低位置時開始,至電動車窗上升到最頂端時停止計數。為了確保計數值準確,采取多次采集并對采集數據進行中值濾波算法得到采集的脈沖數,即為電動車窗的位置標定基準值,并保存至電動車窗控制器的存儲器中。
在進行升降過程中的軟件計數時,將車窗位于最底端的位置記為零,上升過程中從零開始進行加法計數,下降過程中則進行減法計數。根據計數值與基準值對比即可得到車窗的具體位置,與歐洲74/60/EEC和美國FMVSS118法規的相關標準對比以確定車窗是否在防夾區域[7-8,20]。
采用霍爾傳感器和標定基準值方法的好處在于:
(1)霍爾傳感器的計數誤差小,性能穩定,并且可通過調整計數磁場強度來優化計數精度;
(2)采用標定基準值確定車窗升降位置的方法,可以通過定期更新標定基準值來密閉車窗部件老化所產生的誤差,提高系統的自適應性。

(15)
若K=70,K1=4,r=0.025 5 m,則Lp=0.572 mm,也就是說車窗電機每旋轉1轉,車窗升降2.288 mm。
電機轉軸旋轉檢測車窗升降行程的霍爾脈沖當量,可用于電動車窗防夾區域的檢測判斷,是電動車窗防夾系統控制策略制定和軟件程序編程的基礎[15]。
3.2 電動車窗電機的機械功率計算
目前進行電動車窗防夾判斷的依據大多采取電機電流檢測方法,通過多次采集電動車窗受到障礙物時的電機電流值,并取平均值作為電動車窗的防夾電流閾值。在電動車窗上升過程中實時采集電機電流并與防夾電流閾值進行對比,如果實時采集電機的電流大于或等于防夾電流閾值,則認為電動車窗遇到障礙物,電動車窗停止運動并下降1 s。
上述技術方案還存在以下缺點:在電動車窗按鍵剛剛觸動(上升或下降)時,由于電動車窗電機剛啟動,還沒能建立起電動車窗電機的反向電動勢,電機電流會在短時間內有很大的脈沖,且電流脈沖的幅值往往比防夾電流閾值要大很多。因此,電動車窗控制器會認為車窗在升降過程中遇到了障礙物,從而啟動防夾控制策略,停止電機運動,影響電動車窗正常升降功能的使用。另外由于電動車窗(靜態的或動態的)摩擦的變化和機械傳動的間隙造成電機電流的間斷性,影響了電機是否遇障礙物發生堵轉情況的準確判斷。
為了避免上述技術方案所遇到的問題,采用機械功率計算的方法取代電機電流檢測的方法,以防止誤判斷,準確判斷電動車窗升降過程中遇到障礙物。機械功率計算采用電流與角速度乘積的方法,以保證計算結果能夠避免由于車窗靜態或動態摩擦以及機械系統傳動間隙而導致的電機電流間斷的狀況,提高對障礙物判斷的準確性,有效避免誤防夾情況發生。
車窗電機通過控制自身的旋轉,經過蝸輪蝸桿機構進行降速增扭后,再通過卷揚輪使電機的旋轉運動轉換為車窗的直線升降運動,車窗電機是永磁直流電機。圖1給出了電機電樞的簡化電路(見圖(a))和電機軸的剛體模型(見圖(b))[23]。
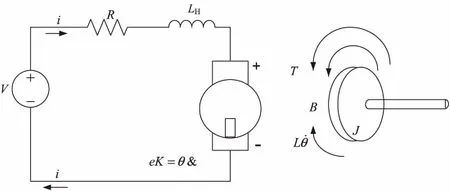
(a)電樞簡化電路 (b)電機軸模型
圖1 電樞的簡化電路和電機軸的剛體模型

T=Kti
(16)
(17)
在SI單位制中,可以取Kt=Ke=K。
由牛頓定律和基爾霍夫定律可得:
(18)
(19)
式中,LH為電感;R為電阻;V為電壓。
將轉矩T作用于一剛體,使剛體以一定的角速度旋轉,剛體的機械功率P可用轉矩與角速度作乘積計算得到,即[24-25]:

(20)
式中,P為功率。
當電動車窗在升降過程中遇到障礙物,則會在Δt時間內出現機械功率的急劇變化,通過PWM脈寬控制電機電樞的輸入電壓以調制電機的啟動速度,避免在電機啟動階段就出現機械功率激增狀況的出現。假定起動時間為tramp,起動電壓為V0,可得電動車窗電機的輸入電壓表達式為[19]:
(21)
式中,tramp為起動時間;Vbat為電源電壓;Vm為瞬時電壓;V0為啟動電壓;T為時間。
起動電流為:
(22)
(23)
因為電感L很小,電機電流的變化會很大。故汽車電動車窗電機剛啟動時,電機轉動的角速度是基于時間線性增加,并符合下列公式:
(24)
如果可以在電機轉動角速度變化之前完成障礙物的檢測,則電動車窗電機的機械功率公式為:
(25)
因而,檢測到障礙物的機械功率變化值可定義為:

(26)
綜上,汽車電動車窗的防夾采用電機霍爾脈沖信號檢測與電機機械功率計算雙重檢驗的方法。
首先,根據上述方法得到的電動車窗的位置標定基準值,采集到的霍爾脈沖信號進行電機轉速計算,并與電動車窗的位置標定基準值進行對比以確定電動車窗所處的具體位置,依據歐洲74/60/EEC和美國FMVSS118法規的相關標準,以確定車窗是否在防夾區域和車窗最頂端[7-8,20]。
其次,為了避免系統會將電動車窗在啟動初始階段的電機電流激增,以及電動車窗(靜態的或動態的)摩擦的變化和機械傳動間隙造成的電機電流間斷等情況誤判為遇到障礙物,采用機械功率計算的方法取代電機電流檢測的方法,預防錯誤判斷,準確判別電動車窗升降過程中是否遇到障礙物。機械功率計算采用電流與角速度乘積的方法,以確保計算結果可以避免由于車窗靜態或動態摩擦以及機械系統傳動間隙而導致的電機電流間斷的狀況,提高對障礙物判斷的準確性,有效避免誤防夾情況發生。
4 仿真與結果分析
依據上述分析的永磁直流電機模型以及汽車車窗防夾區域檢測原理,運用MATLAB/Simulink搭建汽車電動車窗防夾系統的仿真模型,如圖2所示。
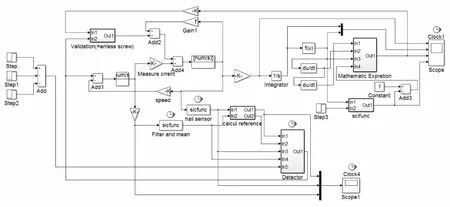
圖2 汽車電動車窗防夾系統仿真模型
4.1 電動車窗正常升降
電動車窗從啟動初始階段開始,運行至最頂端過程中的電動車窗電機電樞電流的波形曲線見圖3。
電動車窗處于啟動初始階段時,電動車窗電機剛啟動,還沒有建立起電動車窗電機的反向電動勢,電機電樞電流會在短時間內有很大的電流脈沖,然后隨著車窗電機反向電動勢的出現而驟然減小;當電動車窗處于正常運行階段時,由于電動車窗運行所遇到的阻力具有穩定性,因而電動車窗電機電樞電流穩定為某一常數值;當電動車窗運行至車窗的最頂端時,由于車窗運行遇到很大的阻力而使電動車窗電機產生堵轉,電機電樞電流急速增大,促使電動車窗控制器中斷電機驅動電流,車窗電機電樞電流驟降為零。至此,完成了電動車窗從啟動初始階段,經過穩定運行階段,到達車窗最頂端的整個過程。
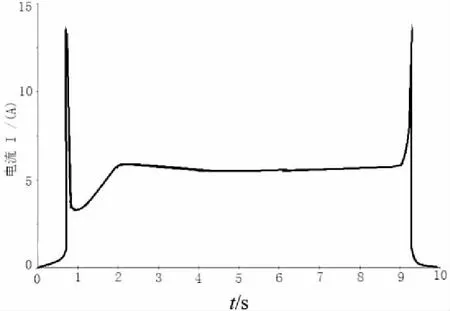
圖3 電機電樞電流波形圖(1)
4.2 電動車窗升降進程遇到障礙物
電動車窗從啟動初始階段開始,運行至最頂端過程中遇到障礙物的電動車窗電機電樞電流的波形曲線如圖4所示。
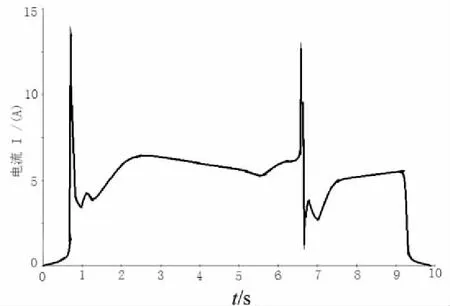
圖4 電機電樞電流波形圖(2)
電動車窗在啟動初始階段,電動車窗電機剛啟動,還沒有建立起電動車窗電機的反向電動勢,電機電樞電流會在短時間內有很大的電流脈沖,然后隨著車窗電機反向電動勢的出現而驟然減小;當電動車窗處于正常運行階段時,由于電動車窗運行所遇到的阻力具有穩定性,因而電動車窗電機電樞電流穩定為某一常數值;當電動車窗處于正常穩定運行階段時,由于電動車窗橡膠件老化以及膠條和車窗玻璃之間有沙粒等導致車窗升降阻尼力增大,電動車窗電機電樞電流略有增大,但電機電樞電流仍趨于一個穩定的數值,且遠遠小于電動車窗防夾閾值;利用采集到的霍爾脈沖信號計算出電機轉速,通過對比電動車窗的位置標定基準值確定電動車窗所處的具體位置,依據歐洲74/60/EEC和美國FMVSS118法規的相關標準以確定車窗是否達到防夾區域和車窗最頂端,當確定電動車窗穩定運行至防夾區域遇到障礙物,通過計算電機機械功率判斷大于正常運行階段的防夾閾值,則電動車窗的防夾功能啟動。此時,電動車窗控制器首先中斷電機電流輸出,使車窗電機停止轉動,然后通過輸出反向驅動電流使電機反向轉動,由于此時電機還沒有建立起反向電動勢,電機電樞電流會在短時間內有很大的反向電流脈沖,隨著車窗電機反向電動勢的出現而驟然減小,電動車窗電機電流經過上述波動后再趨于平穩,電動車窗穩定反向運行至車窗的安全區域后停止轉動,電機電樞電流減小至零。至此,完成了電動車窗從啟動初始階段,經過穩定運行階段遇到障礙物并執行防夾功能,使車窗反向降至安全區的整個過程。
仿真結果表明:綜合考慮電機霍爾脈沖信號檢測和機械功率計算的方法能夠實現汽車車窗自動防夾功能。
采用霍爾脈沖信號進行電機轉速計算并與電動車窗的位置標定基準值進行對比以確定電動車窗所處的具體位置;采用機械功率計算的方法取代電機電流檢測可有效避免電動車窗在啟動初始階段的電機電流激增誤判為遇到障礙物,以及電動車窗(靜態的或動態的)摩擦變化和機械傳動的間隙造成車窗電機電流的間斷性,提高對障礙物判別的準確性。
5 結束語
采用電機霍爾脈沖信號檢測與機械功率計算相結合的汽車電動車窗防夾控制策略,可準確確定電動車窗所處的具體位置,有效避免電動車窗在啟動初始階段的電機電流激增,以及電動車窗(靜態的或動態的)摩擦變化和機械傳動間隙造成的電機電流間斷等誤判為遇到障礙物的情況,提高對障礙物判斷的準確性,提升行車的安全性。
[1] 王 義,章俊華,邱云峰.一種低成本汽車電動車窗防夾控制系統[J].測控技術,2011,30(8):45-48.
[2] 衛 蔚.車窗,兒童安全又一殺手—美汽車電動車窗事故頻發[N].新民晚報,2004-07-05(07).
[3] 杜延海.應用雙霍爾傳感器的防夾電動車窗設計[D].上海:東華大學,2014.
[4] 馬偉澤,孟德東.汽車電動窗防夾技術的探討[J].天津汽車,2008(10):44-46.
[5] 付朝輝.電動防夾車窗技術探討[J].汽車電器,2012(7):15-18.
[6] 楊曉玉.博澤推出第六代電動玻璃升降器防夾系統[J].現代制造,2012(18):18-18.
[7] 艾晨晨.基于μCOSⅡ的汽車電動車窗防夾控制系統設計[D].合肥:合肥工業大學,2013.
[8] 馬偉澤,張申科,汪宏杰.采用霍爾傳感器的汽車電動車窗防夾設計[J].汽車工程,2008,30(12):1122-1124.
[9] 戴國駿,張 翔,張懷相,等.電動車窗防夾系統的建模與實現[J].汽車工程,2008,30(6):539-541.
[10] 許師中.基于電流紋波純硬件波形轉化的車窗防夾設計[J].廈門理工學院學報,2014,22(1):11-16.
[11] 解友華.基于CAN/LIN總線的車燈和電動車窗控制研究[D].上海:上海交通大學,2007.
[12] Sui J S,Hirshey J A.Automobile CVT shift and park mechanism and powered lift gate simulation using ADAMS and CATIA[C]//Proc of international ADAMS user conference.[s.l.]:[s.n.],2000.
[13] 徐 宗,馬生寶,王坤東,等.本田(HONDA)奧德賽(ODYSSEY)轎車電路—電動車窗控制系統[J].汽車電器,2005(11):12-18.
[14] 田 永,方 瑛.汽車電動車窗防夾設計探究[J].汽車電器,2014(8):12-15.
[15] 韓 陽.車窗防夾控制算法和系統的研究[D].哈爾濱:哈爾濱工業大學,2010.
[16] 李 魯.汽車電動車窗控制電路設計[J].汽車電器,2006(7):11-15.
[17] 車用電動窗開關技術條件[S].北京:國家發展與改革委員會,2007.
[18] 劉曉明,邵亞輝,吳浩威,等.無傳感器汽車車窗防夾設計[J].微電機,2007,40(4):48-50.
[19] 傅 侃,劉 博,李二濤.基于LIN總線防夾電動車窗的研究與設計[J].杭州電子科技大學學報,2008,28(3):39-42.
[20] 吳海燕,吳志紅,朱 元,等.車門控制模塊的電動車窗的設計[J].今日電子,2006(9):74-77.
[21] 周 易.汽車電動窗防夾系統的研發[J].北京汽車,2007(4):31-34.
[22] 易 波.基于LIN總線的汽車車窗智能控制系統的應用研究[D].武漢:武漢理工大學,2009.
[23] Daniels A R,Frommer T P,Pribisic M.Vehicle closure anti-pinch assembly having a non-contact sensor:U.S.,7 038 414[P].2006-05-02.
[24] 張寒彬,曾 紅.虛擬車窗防夾測試系統的研究與實現[J].杭州電子科技大學學報,2008,28(1):56-59.
[25] 馬加其.防夾電動車窗的改進[J].湖北汽車工業學院學報,2007,21(3):79-80.
Power Window Anti-pinch Control Based on Hall Pulse Signal and Mechanical Power
TANG Xi-wen1,WU Shi-long1,DONG Rui1,AI Chen-chen2
(1.Radar Confrontation Department,PLA College of Electronics Engineering,Hefei 230037,China;2.Institute of Automotive Engineering,Hefei University of Technology,Hefei 230009,China)
In order to avoid the erroneous judgement produced by the motor discontinuous current,which is caused by the gap between mechanical friction and mechanical transmission,the automobile power window anti-pinch control strategy is proposed through combining the motor Hall pulse signal detection and mechanical power calculation.Motor Hall pulse signal detection is used to judge whether to reach the window glass anti-pinch region and the upper limit,then the mechanical power window motor is calculated to achieve the accurate judgment to the detection window of obstacles.Based on calculating the main parameters of power window transmission system and the motion model of the lifting and downing window of DC motor,the power window anti-pinch system model is set up based on the MATLAB/Simulink,and the simulation has been done.The simulation shows that the power window anti-pinch control strategy,combined power window motor Hall pulse signal detection with mechanical power calculation,can accurately detect the anti-pinch region,effectively to avoid inadvertent occlusion accidents,enhancing the safety of the car.
automotive power window anti-pinch;Hall pluse signal;mechanical power;anti-pinch region
2015-05-04
2015-09-15
時間:2016-07-29
中央高校基本科研業務費專項資金資助項目(JZ2014HGBZ0054,2013bh2X0055)
唐希雯(1983-),女,碩士,工程師,研究方向為信號與信息處理。
http://www.cnki.net/kcms/detail/61.1450.TP.20160729.1833.016.html
TM331
A
1673-629X(2016)08-0119-06
10.3969/j.issn.1673-629X.2016.08.025
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50