基于多尺度各向異性高斯核的彩色圖像邊緣檢測算法
2016-02-24 03:45:08盧健,黃杰,潘峰
計算機技術與發(fā)展 2016年5期
盧 健,黃 杰,潘 峰
(西安工程大學 電子信息學院,陜西 西安 710048)
基于多尺度各向異性高斯核的彩色圖像邊緣檢測算法
盧 健,黃 杰,潘 峰
(西安工程大學 電子信息學院,陜西 西安 710048)
文中提出一種新的對噪聲魯棒的彩色圖像邊緣檢測算法。該算法利用多尺度乘積作為提取彩色圖像的邊緣映射的測度。首先,分別利用單尺度各向異性高斯核的方向導數(shù)計算彩色圖像的邊緣強度映射后再求取尺度乘積的均方值,然后通過非極大值抑制找出候選邊緣像素點,最后在高低門限值的約束下去除偽邊緣像素點,通過滯后判定實現(xiàn)邊緣連接并將邊緣圖作為掩碼與彩色圖像結合形成彩色圖像邊緣圖。與Canny算法相比,該算法通過多尺度高斯核的結合得到較好的邊緣分辨率,同時引入依賴于噪聲的高低門限來控制虛假邊緣的發(fā)生可能性。
各向異性高斯核;多尺度;EMS;彩色圖像
1 概 述
邊緣是指圖像局部強度變化最顯著的部分,其中彩色圖像的比灰度圖像多10%的信息量,因此對彩色圖像進行邊緣檢測能更好地提取出邊緣輪廓。圖像邊緣提取是圖像理解和圖像處理中重要的低層次處理,主要是檢測出灰度圖像中灰度強度變化顯著的地方。邊緣輪廓的提取廣泛地應用于圖像分析和計算機視覺中,例如圖像分割[1]、圖像檢索[2]和目標跟蹤[3]等。因此,提出一種有效可靠的邊緣檢測算法是非常重要的。
邊緣提取已經在計算機視覺和圖像處理領域中得到有效的利用超過50年之久。大量的方法被提出用來分析圖像強度的變化。這些方法可以分成兩部分[4]:局部分析和全局分析。早先的算法主要是基于微分的[5-7]、統(tǒng)計學的[8-9]和多分辨率的[10]算法。后期主要表現(xiàn)為基于主動輪廓的算法[11-12]。文中主要介紹的是基于微分的邊緣檢測算法。
基于微分的邊緣檢測算法一種是通過一階導數(shù)絕對值的極大值來尋找邊緣像素點,另外一種是通過圖像的二階導數(shù)的零交叉點來尋找邊緣像素點。早期的算法都遭遇到了由于噪聲的影響而降低邊緣的檢測性能的困境,例如Prewitt算子[5]、Robert算子[13]和Sobel算子[14]都利用局部梯度算子來檢測邊緣。
為了解決上述所提出的問題,可以在微分之前先用低通濾波器對圖像進行平滑。Marr和Hildreth[15]首先引進了高斯濾波器來檢測圖像邊緣,并且利用拉普拉斯高斯算子(LOG)計算圖像的二階導數(shù),從而找到零交叉點。后來,Haralick[16]認為可以把邊緣定義為沿梯度方向梯度值最大的點。Lindeberg[17]提出了基于離散近似導數(shù)的最近鄰算法來檢測邊緣。從那以后,正則化的拉普拉斯零交叉點算法被認為是最優(yōu)化的邊緣積分器[18],并且改進的LOG算子[19]也被相繼提出,且各自分別在對邊緣檢測時具有較強的定位性和噪聲的魯棒性。
從圖像獲取的方式來看,數(shù)字圖像總是會被噪聲污染。在這種情況下,邊緣檢測被認為是最優(yōu)化的濾波器設計問題。Canny[6]首先構想出把邊緣檢測看成一個最優(yōu)化問題,得到一個在高斯白噪聲條件下提取一維下的邊緣輪廓。根據(jù)Canny檢測器的原理,此濾波器可以由各向同性高斯核的一階導數(shù)來替代。Canny邊緣檢測器主要有高斯平滑、梯度計算、非極大值抑制和高低門限選擇等步驟,這個是被廣泛地應用到工業(yè)標準的邊緣檢測算法。然而,Canny算法至少也面臨著兩個缺點[7,20]:一方面,小尺度的各向同性高斯核可以提取圖像中強度的細節(jié)變化,但是對噪聲卻很敏感,然后大尺度高斯核可以獲得較好的噪聲魯棒性但定位精確性降低。另一方面,邊緣像素可以定義為一邊梯度值小于另一邊的像素梯度值,但這可能會漏檢一些明顯的邊緣。邊緣丟失多數(shù)發(fā)生在交叉邊緣部分,這也嚴重影響了基于邊緣輪廓的圖像處理的一些應用,比如基于邊緣輪廓的角點檢測[21-22]。其中,角點被認為是邊緣的交叉點或者是局部曲率的極大值點。
為了獲得精確的圖像灰度變化和圖像結構信息,Canny[6]也提出了一種特征綜合的由粗到細的邊緣檢測算法。在這種情況下,Bergholm[23]提出了利用各向同性高斯核分別從低分辨率到高分辨率來追蹤邊緣。Lindeberg[24]提出了尺度空間下的邊緣檢測。Mallat和Zhong對奇異點和邊緣檢測器利用多分辨率而使Canny的方法更廣泛化[10]。Shui和Zhang[7]提出了一個對噪聲魯棒性的邊緣檢測器,這個檢測是在Canny檢測器的框架下融合各向同性和各向異性高斯核來檢測邊緣的。Elder等[25]提出了基于各向同性高斯核和邊緣追蹤的多尺度邊緣檢測算法。Molina等[26]介紹了基于增加高斯平滑的多尺度邊緣檢測算法。
這些方法比起Canny算子得到了更好的檢測結果。然后,多尺度算法也面臨著一些限制[27]:應該選取多少個濾波器來平滑圖像和怎樣確定濾波器的尺度大小。Lindeberg[28]提出一種邊緣脊線的檢測算法,該算法可以在粗尺度下擴散邊緣和精尺度下檢測階躍邊緣。Ding和Goshtasby[20]首先提出基于Canny的邊緣定義問題,然后再結合梯度值局部最大值和非極大值抑制去提取邊緣像素。文獻[29]通過貝葉斯風險理論來分辨邊緣。Mcilhagga[30]提出一個基于Canny標準上的更優(yōu)化邊緣檢測器,稱為無限對稱指數(shù)濾波器[31]。盡管上述提到的濾波器都提高了Canny邊緣檢測器的性能,但是還有很多地方有待進一步提高。
文獻[12]中提到基于各向同性高斯核的邊緣檢測算法只利用了水平和垂直兩個方向上的方向導數(shù),然而如果能利用更多的方向導數(shù),那么將會提高噪聲魯棒性的能力。此外,邊緣是有各向異性的屬性的,它沿著不同的方向會有不同的幾何結構和概率特性。文獻[21]也證明各向同性高斯核不能滿足上述情形,而各向異性高斯核(ANGKs)有著更好的噪聲魯棒性,能從圖像中提取更精確的灰度變化信息。
文中將在高信噪比、精準定位和高的邊緣分辨率這三個條件下設計多尺度乘積的各向異性方向導數(shù)(ANDD)來提取灰度變化信息。通過與Canny檢測算子作比較,實驗結果表明,提出的算法有著更好的邊緣完整性和精確性。
2 圖像邊緣檢測算法
2.1 各向異性高斯核函數(shù)及方向導數(shù)濾波器
擴展的二維高斯核函數(shù)[32]可表示為:
(1)
其中:σ為尺度大小;ρ為各向異性因子;U=[uv]T為直角坐標系坐標。
對式(1)中U變量求導可得到一階微分算子:
(2)
通過逆時針旋轉式(1)可得到不同方向各向異性高斯核方向導數(shù)表達式:
(3)
其中,Rθ為高斯核旋轉角度為θ的旋轉矩陣。
圖1為各向異性高斯核方向導數(shù)濾波器在八個方向上的表現(xiàn)形式。這樣在其中任何一個方向上各向異性高斯核函數(shù)都可以對圖像進行平滑,并且各向異性高斯方向導數(shù)也可以較好地提取圖像多尺度多方向的灰度變化信息。
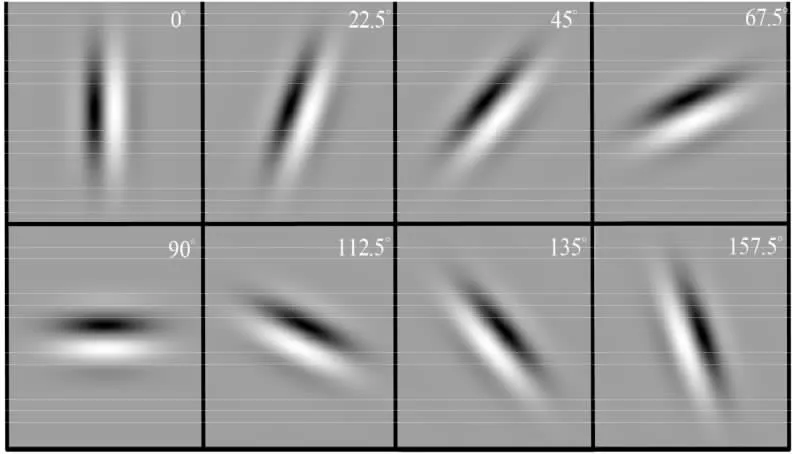
圖1 八個方向各向異性高斯核方向導數(shù)濾波器
2.2 方向導數(shù)對噪聲抑制及其離散化形式
噪聲在圖像處理過程中是不可避免的。通過圖像被零均值方差為ε2的高斯白噪聲w(x)污染來衡量各向異性高斯核方向導數(shù)抑制能力。噪聲的各向異性方向導數(shù)響應的方差如下:

(4)
由式(4)可以看出,方向導數(shù)濾波器抑制噪聲的能力只與噪聲方差、尺度大小和各向異性因子有關,與旋轉角度θ無關。由于實際圖像都是離散的,所以對各向異性高斯核方向導數(shù)作離散采樣處理,如式(5)所示:
(5)
則圖像I(N)各向異性高斯核方向導數(shù)濾波器響應為:
(6)
2.3 圖像的邊緣映射
現(xiàn)定義各向異性高斯方向導數(shù)濾波器平滑圖像得到的每個像素的最大幅度值構成了基于各向異性方向導數(shù)的邊緣映射。尺度是唯一決定基于各向異性高斯核方向導數(shù)的邊緣映射的信噪比大小的因素。因此使用大尺度來獲得高信噪比,而使用小尺度與各向異性因子比值來獲取高邊緣分辨率,最后利用兩尺度的乘積作為檢測邊緣輪廓的測度。
假使由式(6)中P個方向(文中選擇32個方向)的各向異性高斯核方向導數(shù)濾波器對圖像進行濾波,則可得到基于各向異性高斯核方向導數(shù)的邊緣映射定義:
(7)
其中,I(N)表示一幅連續(xù)的圖像。
這種情況下,只要各向異性高斯核方向導數(shù)中有一個各向異性方向導數(shù)濾波器能夠把兩個相鄰邊緣區(qū)分出來,就等同于基于各向異性高斯核方向導數(shù)的邊緣映射能夠把它們區(qū)分開。
由于噪聲魯棒性和強分辨率是基于各向異性高斯核方向導數(shù)的邊緣映射重要特征,所以利用式(7)對圖像平滑濾波后在P個方向中選眾多方向中的最大值。當然任何檢測圖像進行邊緣檢測之前都需要進行平滑濾波的過程,雖然平滑必定會帶來邊緣模糊和邊緣拉伸。
對于各向異性高斯核,邊緣拉伸和邊緣模糊現(xiàn)象會在一定程度上一起發(fā)生。小尺度核會產生小的邊緣模糊和邊緣拉伸,但抗噪性差;而大尺度則會產生嚴重的邊緣模糊和邊緣拉伸,但有非常好的噪聲魯棒性。因此,使用基于各向異性高斯核方向導數(shù)的邊緣映射的邊緣檢測會在真實邊緣的末端產生虛假的邊緣像素。考慮到小尺度的邊緣映射只帶來一點邊緣拉伸的這一優(yōu)點,把基于各向異性高斯核方向導數(shù)小尺度的邊緣映射ηa(x)和大尺度邊緣映射ηg(x)乘積融合成一個新的邊緣映射ηf(x)。融合后的邊緣映射定義為:
(8)
這種融合是通過精度為像素級的幾何平均來實現(xiàn)的。因為不同尺度的邊緣映射有著相同的邊緣分辨率,所以這種融合不會降低邊緣分辨率。由于求的是幾何平均值,所以融合后的邊緣映射既繼承了小尺度邊緣映射的優(yōu)點,較低的邊緣拉伸效應,也保持著大尺度邊緣映射中較高的噪聲魯棒性,并且信噪比等于兩個尺度信噪比的幾何平均。
2.4 算法步驟
(1)計算邊緣映射:將彩色圖像轉換成灰度圖像后,利用不同尺度下各向異性高斯核方向導數(shù)與圖像進行卷積并將融合的多尺度的乘積均方值作為邊緣強度映射并同時進行歸一化處理。
(2)非極大值抑制:對于每一個像素,利用梯度幅值和梯度方向θ(n)來判斷該像素是否是邊緣映射中的極大值。所有極大值點形成的候選邊緣像素集為Ω(n)。
(3)高低閾值門限和滯后判定:利用強度值超過高門限Tmax判定為強邊緣像素,根據(jù)八鄰域準則判定那些超過低門限而低于高門限的候選像素是否有一個通路與強邊緣連接,從而構成圖像的邊緣圖。
(4)使用上文所得的邊緣圖作為掩碼,將邊緣圖拷貝到彩色圖像中。
3 結果及性能分析
為了驗證文中提出的算法比經典的Canny算子檢測算法性能更佳,故選取經典的Lena圖像在Matlab軟件仿真條件下來驗證文中提出的圖像邊緣檢測算法比Canny算子的優(yōu)越性。
圖2為實驗所用的256×256的Lena彩色圖像。

圖2 經典Lena圖像
實驗中各向異性高斯核方向導數(shù)選取的方向P=32,尺度因子σ分別取1和3,同時由于各向異性因子ρ=σ,故也均同時取值為1和3,高閾值取灰度值直方圖中大于70%灰度值以上的像素,低閾值取高閾值的0.4倍,而經典的Canny算子中高低閾值取值范圍為[0,0.35]。
算法對圖像的檢測結果如圖3所示。

圖3 實驗檢測結果
從圖3(a)中可以看出,Lena圖像的右邊臉部輪廓沒有全部檢測出來,并且背景中柱子也只是檢測出來一條邊緣。反觀圖3(b)的結果圖在這兩方面就全部檢測出來且清晰可見。在細節(jié)上,Canny算子的檢測結果還有很多虛假邊緣,尤其是在帽子上的虛假邊緣,主要是外界噪聲的影響使得檢測器受到干擾,而各向異性高斯核方向導數(shù)算子就體現(xiàn)出了對噪聲的魯棒性,細節(jié)邊緣清晰可見并且虛假邊緣幾乎沒有。
綜上所述,與經典的Canny算子檢測算法相比,文中提出的算法具有更好的檢測性能,尤其對噪聲的魯棒性非常突出。
4 結束語
針對圖像邊緣檢測的定義,文中提出了一種基于多尺度的各向異性高斯核方向導數(shù)的彩色圖像邊緣檢測算法。該算法對邊緣檢測具有很好的噪聲穩(wěn)健性,其提取彩色圖像的邊緣映射利用的是小尺度邊緣映射與大尺度邊緣映射的乘積均方融合,不僅能快速提取圖像多方向的灰度變化信息,而且目標圖像的細節(jié)邊緣還能被很好地檢測出來。大量的實驗數(shù)據(jù)表明,與Canny邊緣檢測相比,文中提出的圖像邊緣檢測算法在邊緣細節(jié)和噪聲魯棒性上都有較大優(yōu)勢。對于圖像的邊緣分辨率與拉伸效應,文中算法在設計檢測器時也優(yōu)先考慮到。同時,理論分析與實驗結果也都明確表明,與Canny的三大準則,即低的虛假響應、邊緣定位和信噪比一樣,圖像的邊緣分辨率在圖像的特征提取中也是很重要的。
[1]RiveraAR,MurshedM,KimJ.Backgroundmodelingthroughstatisticaledge-segmentdistributions[J].IEEETransactionsonCircuitandSystemsforVideoTechnology,2013,23(8):1375-1387.
[2]ZhangSL,TianQ,LuK,etal.Edge-SIFT:discriminativebinarydescriptorforscalablepartial-duplicatemobilesearch[J].IEEETransactionsonImageProcessing,2013,22(7):2889-2902.
[3]ZhaoP,ZhuH,ShibataT.Adirectional-edge-basedrealtimeobjecttrackingsystememployingmultiplecandidate-locationgeneration[J].IEEETransactionsonCircuitandSystemsforVideoTechnology,2013,23(3):503-517.
[4]PapariG,PetkovN.Edgeandlineorientedcontourdetection:stateoftheart[J].JournalofImageandVisionComputing,2011,29:79-103.
[5]PrewittJMS.Objectenhancementandextraction[C]//Procofpictureprocessingandpsychohistories.[s.l.]:AcademicPress,1970:75-149.
[6]CannyJ.Acomputationalapproachtoedgedetection[J].IEEETransactionsonPAMI,1986,8(6):679-698.
[7]ShuiPL,ZhangWC.Noise-robustedgedetectorcombiningisotropicandanisotropicGaussiankernels[J].PatternRecognition,2012,45(2):806-820.
[8]GalvaninEAS,ValeGM,PozAD.TheCannydetectorwithedgefocusingusingananisotropicdiffusionprocess[J].PatternRecognitionandImageAnalysis,2006,16(4):614-621.
[9]YiS,LabateD,EasleyGR,etal.Ashearletapproachtoedgeanalysisanddetection[J].IEEETransactionsonImageProcessing,2009,18(5):929-941.
[10]MallatS,ZhongSF.Characterizationofsignalsfrommulti-scaleedge[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,1992,24(7):710-732.
[11]MallatS,HwangML.Singularitydetectionandprocessingwithwavelets[J].IEEETransactionsonInformationTheory,1992,38(2):617-643.
[12]BaoP,ZhangL,WuXL.Cannyedgedetectionenhancementbyscalemultiplication[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2005,27(9):1485-1490.
[13]RobertsLG.Mthineperceptionofthree-dimensionsolids[C]//Procofoptimalandelectro-optimalinformationprocessing.MA:MITPress,1965:99-197.
[14]SobelIE.Cameramodelsandmachineperception[D].PaloAlto,Calif:StanfordUniversity,1970.
[15]MarrD,HildrethE.Theoryofedgedetection[C]//ProceedingoftheroyalsocietyofLondon.[s.l.]:[s.n.],1980:187-217.
[16]HaralickRM.Digitalstepedgesfromzerocrossingofseconddirectionalderivatives[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,1984,6(1):58-68.
[17]LindebergT.Discretederivativeapproximationwithscale-spaceproperties:abasisforlow-levelfeatureextraction[J].JournalofMathematicalImagingandVision,1993,3(4):349-376.
[18]KimmelR,BruchsheinAM.RegularizedLaplacianzerocrossingsasoptimaledgeintegrators[J].InternationalJournalofComputerVision,2003,53(3):225-243.
[19]WangX.Laplacianoperator-basededgedetectors[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2007,29(5):886-890.
[20]DingLJ,GoshtasbyA.OntheCannyedgedetector[J].PatternRecognition,2001,34(5):721-725.
[21]ShuiPL,ZhangWC.Cornerdetectionandclassificationusinganisotropicdirectionalderivativerepresentations[J].IEEETransactionsonImageProcessing,2013,22(8):3204-3218.
[22]MehrotraR,NamuduriKR,RanganthanN.Gaborfilter-basededgedetection[J].PatternRecognition,1992,25(12):1479-1494.
[23]BergholmF.Edgefocusing[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,1987,9(6):726-741.
[24]LindebergT.Detectingsalientblob-likeimagestructuresandtheirscalewithascale-spaceprimalsketch:amethodforfocus-of-attention[J].InternationalJournalofComputerVision,1993,11(3):283-318.
[25]ElderJ,ZuckerS.Localscalecontrolforedgedetectionandblurestimation[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,1998,20(7):699-716.
[26]MolinaCL,BatesBD,BustinceH,etal.Multi-scaleedgedetectionbasedonGaussiansmoothingandedgetracking[J].Knowledge-basedSystems,2013,44(3):101-111.
[27]BasuM.Gaussian-basededge-detectionmethods-asurvey[J],IEEETransactionsonSystems,Man,andCybernetics-PartC:ApplicationsandReviews,2002,32(3):252-260.
[28]LindebergT.Edgedetectionandridgedetectionwithautomaticscaleselection[J].InternationalJournalofComputerVision,1998,30(2):117-154.
[29]ZhangY,RockettPI.TheBayesianoperatingpointofthecannyedgedetector[J].IEEETransactionsonImageProcessing,2006,15(11):3409-3416.
[30]McilhaggaW.TheCannyedgedetectorrevisited[J].InternationalJournalofComputerVision,2011,25(3):251-261.
[31]ShenJ,CastanS.Anoptimallinearoperatorforstepedgedetection[J].GraphicalModelsandImageProcessing,1992,54,112-133.
[32] 章為川,張 智,趙 強,等.基于各向異性高斯方向導數(shù)濾波器的角點檢測[J].西安工程大學學報,2014,28(4):491-495.
Color Image Edge Detection Algorithm Based on Multi-scale Anisotropic Gaussian Filter
LU Jian,HUANG Jie,PAN Feng
(School of Electronic and Information,Xi’an Polytechnic University,Xi’an 710048,China)
A new color image edge detection algorithm of noise robustness is proposed.It uses multi-scale multiplication as measure to extract the color image map.First,single-scale anisotropic Gaussian kernel directional derivative filters are used to calculate image intensity map respectively and calculate the mean square value of multi-scale multiplication.Then through the non-maximum suppression,the candidate edge pixel is found.Finally,by the high and low threshold values and the implementation of lagging,the false edge pixels are erased to realize edges connected,combining edge figure as a mask with color image to form the color image edge.Compared with the Canny algorithm,the algorithm obtains,by the combination small and big scale of the Gaussian kernel,a better edge resolution.At the same time,high and low threshold dependable of noise is introduced to reduce the possibility of a false edge in noise background.
anisotropic Gaussian;multi-scale;EMS;color image
2015-07-13
2015-10-15
時間:2016-05-05
國家自然科學基金資助項目(61040055);陜西省科學研究計劃項目(2013JK1109)
盧 健(1978-),男,副教授,博士,研究方向為AUV協(xié)同導航、目標跟蹤、圖像處理與模式識別。
http://www.cnki.net/kcms/detail/61.1450.TP.20160505.0817.048.html
TP391.41
A
1673-629X(2016)05-0066-05
10.3969/j.issn.1673-629X.2016.05.014
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46