基于切換增益變結(jié)構(gòu)控制的導(dǎo)彈自動(dòng)駕駛儀設(shè)計(jì)*
2016-03-02 06:24:31趙艷輝張公平
彈箭與制導(dǎo)學(xué)報(bào) 2016年5期
關(guān)鍵詞:結(jié)構(gòu)設(shè)計(jì)
趙艷輝,閆 亮,張公平
(中國空空導(dǎo)彈研究院控制所,河南洛陽 471009)
基于切換增益變結(jié)構(gòu)控制的導(dǎo)彈自動(dòng)駕駛儀設(shè)計(jì)*
趙艷輝,閆 亮,張公平
(中國空空導(dǎo)彈研究院控制所,河南洛陽 471009)
為了提高經(jīng)典三回路自動(dòng)駕駛儀的性能,對(duì)采用尾舵控制的彈體對(duì)象設(shè)計(jì)了切換增益變結(jié)構(gòu)控制自動(dòng)駕駛儀。采用切換增益變結(jié)構(gòu)控制的閉環(huán)響應(yīng)特性對(duì)彈體參數(shù)的變化不敏感。控制量是光滑的避免了對(duì)執(zhí)行機(jī)構(gòu)有害的頻繁切換。采用增益調(diào)度技術(shù)可以容易的獲得全空域的控制器設(shè)計(jì)。仿真結(jié)果表明了設(shè)計(jì)方法的有效性。
自動(dòng)駕駛儀;變結(jié)構(gòu)控制;切換增益;飛行控制系統(tǒng)
0 引言
三回路駕駛儀憑借其簡單的控制結(jié)構(gòu)和優(yōu)良特性,在戰(zhàn)術(shù)導(dǎo)彈控制中得到廣泛的應(yīng)用。文獻(xiàn)[1]給出了多種可能的三回路駕駛儀結(jié)構(gòu),并對(duì)不同的控制結(jié)構(gòu)進(jìn)行了魯棒性分析。文獻(xiàn)[2]給出了中環(huán)為偽攻角反饋的三回路駕駛儀結(jié)構(gòu),討論了舵機(jī)帶寬、非最小相位零點(diǎn)、彈體一彎頻率以及有限控制量約束條件下的三回路快速性極限問題;文獻(xiàn)[3]通過固定混合比例假設(shè),將被控對(duì)象等價(jià)為單輸入系統(tǒng),并設(shè)計(jì)了兩回路變結(jié)構(gòu)控制器,但對(duì)具有一定靜不穩(wěn)定水平的彈體穩(wěn)定性下降。文獻(xiàn)[4]采用積分變結(jié)構(gòu)控制方法設(shè)計(jì)了側(cè)向過載控制器,并采用邊界層函數(shù)削弱了控制量的抖振問題,但控制參數(shù)的確定過程十分繁瑣。
文中以尾舵控制的空空導(dǎo)彈俯仰動(dòng)力學(xué)特性為被控對(duì)象,在經(jīng)典三回路駕駛儀設(shè)計(jì)的基礎(chǔ)上設(shè)計(jì)了變?cè)鲆孀兘Y(jié)構(gòu)控制器。該控制系統(tǒng)繼承了三回路控制結(jié)構(gòu),可與增益調(diào)度控制算法相結(jié)合,工程上易于實(shí)現(xiàn);在彈體參數(shù)攝動(dòng)的情況下,相比于經(jīng)典三回路駕駛儀提高了加速度響應(yīng)的動(dòng)態(tài)品質(zhì)。
1 被控對(duì)象的數(shù)學(xué)模型
三回路自動(dòng)駕駛儀的基礎(chǔ)設(shè)計(jì)是基于被控對(duì)象的小擾動(dòng)線性化和線性系統(tǒng)控制理論開展的。俯仰通道彈體傳遞函數(shù)如下:
(1)
角速度到攻角的傳遞函數(shù)可近似為:
角速度到加速度的傳遞函數(shù)可近似為:
非最小相位零點(diǎn):
其中:a1、a2、a3、a4、a5為常用的動(dòng)力學(xué)參數(shù)[5]。
δp為俯仰通道舵偏;V為導(dǎo)彈速度;ay為俯仰通道測(cè)量加速度;ωz為俯仰角速度;α為攻角。
關(guān)于控制量的符號(hào)作如下約定:正的氣動(dòng)舵偏產(chǎn)生負(fù)的操縱力矩。
2 控制器設(shè)計(jì)
該變?cè)鲆孀兘Y(jié)構(gòu)自動(dòng)駕駛儀設(shè)計(jì)的思路是:首先設(shè)計(jì)偽攻角三回路駕駛儀,確定阻尼回路控制增益和偽攻角回路的控制增益;其次在線性控制的基礎(chǔ)上對(duì)加速度反饋回路施加切換增益變結(jié)構(gòu)控制,通過設(shè)計(jì)合理的切換函數(shù),實(shí)現(xiàn)加速度誤差積分控制增益的切換。變?cè)鲆孀兘Y(jié)構(gòu)自動(dòng)駕駛儀原理圖如圖1所示。圖中:Kω為阻尼回路增益;Kα為偽攻角回路增益;Kei為誤差積分增益;Ke為誤差比例增益。
2.1 線性控制器設(shè)計(jì)
經(jīng)典三回路駕駛儀通常采用極點(diǎn)配置的方法進(jìn)行設(shè)計(jì)。俯仰通道加速度閉環(huán)傳遞函數(shù)如下:
圖1 變?cè)鲆孀兘Y(jié)構(gòu)自動(dòng)駕駛儀原理圖
(2)
式中:
B2=(-Kωa3+a1+a4)
設(shè)期望的閉環(huán)特征多項(xiàng)式為:
(s+A)(s2+2ζωs+ω2)
則有如下關(guān)系成立:
俯仰通道開環(huán)傳遞函數(shù)如下:
通過中頻段近似可知:
Kω(-a3)=ωcr
綜合考慮舵機(jī)帶寬、非最小相位零點(diǎn)、一彎彈性振蕩頻率的約束,在確定系統(tǒng)開環(huán)帶寬和閉環(huán)阻尼比的情況下,確定閉環(huán)傳函的零極點(diǎn)分布,可得使等效一階時(shí)間常數(shù)極小化的一組線性控制增益。典型的閉環(huán)零極點(diǎn)分布圖如圖2所示。
圖2 使等效一階時(shí)間常數(shù)極小化的閉環(huán)零極點(diǎn)分布圖
2.2 變結(jié)構(gòu)控制器設(shè)計(jì)
阻尼回路和偽攻角回路控制增益的引入改善了彈體二階極點(diǎn)對(duì)的阻尼比和穩(wěn)定性,使得由Eα到ωz的傳遞特性穩(wěn)定并具有良好的阻尼比。引入狀態(tài)反饋后的等效控制框圖如圖3所示。
其中:
b=KωV(a2a5-a3a4)>0
τ2=(a1+a4-Kωa3)>0
τ1=a2+a1a4+Kω(a2a5-a3a4)+KαKω(-a3)>0
圖3 引入狀態(tài)反饋后的等效加速度控制框圖
控制關(guān)系為誤差比例積分控制:
誤差定義:e=ayc-ay
其中:c2>0,c1>0。
考慮階躍輸入的情況下,切換面函數(shù)的變化為:
將動(dòng)態(tài)約束方程代入上式得:
令Ke=(c1-τ1-(c2-τ2)c2)/b

PA6粒子以及自制的PAPP在使用前均在100 °C烘箱中干燥12 h。隨后將PAPP和PA6按照不同的比例混合,加入密煉機(jī)中。每次加料70 g,轉(zhuǎn)子轉(zhuǎn)速為40 轉(zhuǎn)/min,密煉溫度為230 °C,密煉時(shí)間為10 min。將所得樣品在平板硫化機(jī)壓板成型,模壓溫度為240 °C,模壓時(shí)間為10 min。最后按照測(cè)試需要制備成標(biāo)準(zhǔn)樣條,測(cè)試結(jié)果取5次測(cè)試結(jié)果的平均值。各組分比例見表1。
選擇Lyapunov函數(shù):V(σ)=σ2/2
Lyapunov函數(shù)的變化率為:
進(jìn)一步有:
式中:
為避免引入正實(shí)零點(diǎn),限制Ke≥0。
至此得到了積分控制增益的切換條件,再看切換面函數(shù)的具體形式。由簡化的角速度到加速度的傳遞函數(shù)可得如下微分方程:
結(jié)合誤差定義方程將誤差的各階導(dǎo)數(shù)代入切換面函數(shù)表達(dá)式,得到:
σeq=e-K6yωsynth
ωss=ac/V
k為設(shè)定數(shù),它和(c2-1/Tm)k一起決定了穩(wěn)態(tài)時(shí)角速度收斂的快慢程度。
在切換面函數(shù)中存在角加速度信號(hào),為了避免微分角速度信號(hào)帶來的測(cè)量噪聲放大問題,采用濾波器對(duì)角速度和角加速度進(jìn)行估計(jì),原理如圖4所示,其中p為濾波器帶寬。
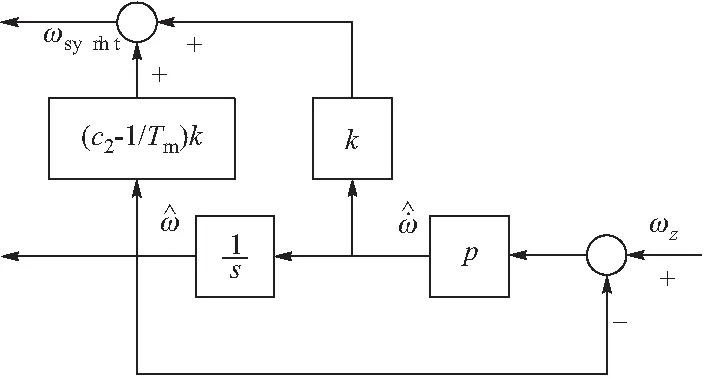
圖4 通過濾波器估計(jì)角加速度和角速度信號(hào)
下面討論切換面運(yùn)動(dòng)特征方程參數(shù)的選擇。
1)依據(jù)期望的角速度誤差運(yùn)動(dòng)規(guī)律確定k,(c2-1/Tm)k;
2)由(c2-1/Tm)k確定c2,并注意穩(wěn)定性條件要求c2<τ2,由開環(huán)系統(tǒng)穿越頻率表達(dá)式可知τ2=(a1+a4-Kωa3)≈a1+a4+ωcr,則c2有較大的選擇空間;
則最終的加速度誤差積分控制增益切換邏輯為:
(3)
式中:
σeq=e-K6yωsynth
3 仿真驗(yàn)證
以高度10 km,馬赫數(shù)2的特征點(diǎn)為例,進(jìn)行線性控制器和變結(jié)構(gòu)控制器的設(shè)計(jì)。

表1 被控對(duì)象標(biāo)稱參數(shù)

表2 線性控制增益

表3 和變結(jié)構(gòu)控制有關(guān)的控制參數(shù)
積分控制增益切換邏輯:
式中:Kei,nom=0.166;c+=1.1,c-=0.7。
給定相同的加速度指令,對(duì)標(biāo)稱參數(shù)和參數(shù)攝動(dòng)情況下的仿真結(jié)果進(jìn)行對(duì)比分析,參數(shù)攝動(dòng)主要考慮靜穩(wěn)定度隨攻角的變化,a2的變化范圍為標(biāo)稱值的±5倍,覆蓋一定的靜穩(wěn)定和靜不穩(wěn)定區(qū)域。仿真結(jié)果如圖5~圖9所示。
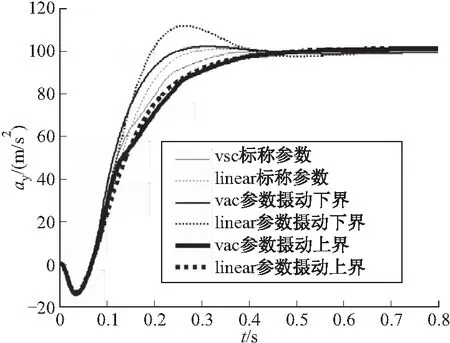
圖5 加速度響應(yīng)曲線對(duì)比
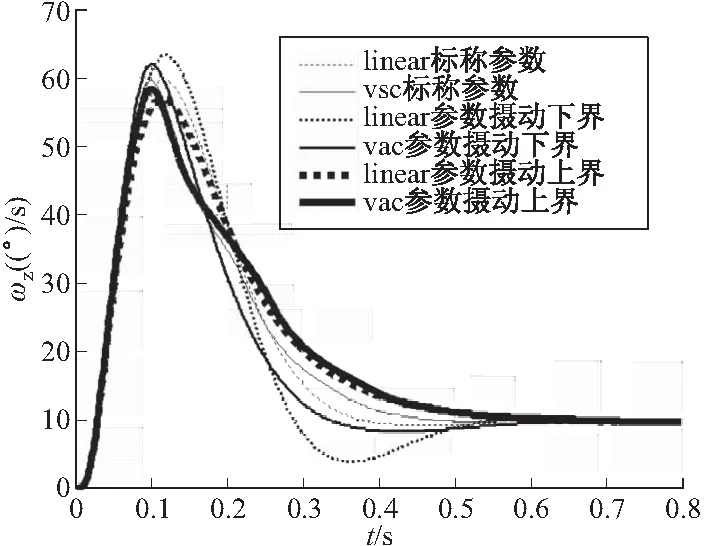
圖6 角速度響應(yīng)曲線對(duì)比
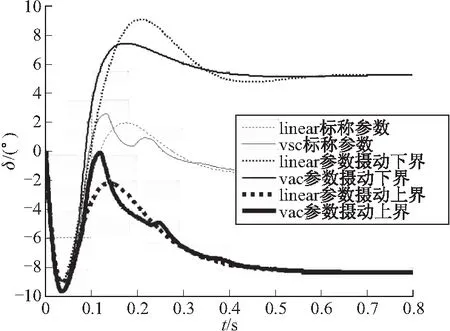
圖7 控制量對(duì)比曲線
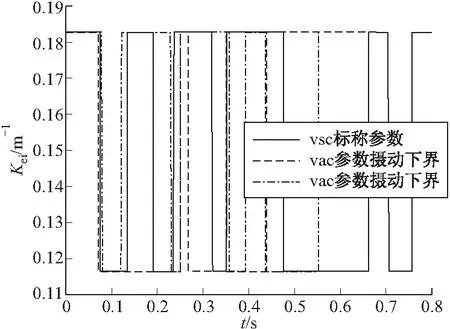
圖8 控制增益切換曲線
圖5~圖6的加速度和角速度響應(yīng)曲線表明:采用變結(jié)構(gòu)控制器的加速度響應(yīng)一階等效時(shí)間常數(shù)和線性控制器的差異小于5 ms,切換增益變結(jié)構(gòu)控制使加速度響應(yīng)對(duì)參數(shù)變化不敏感,超調(diào)量較小,改善了閉環(huán)響應(yīng)特性;仿真同時(shí)表明忽略非最小相位特性的切換面函數(shù)設(shè)計(jì)是可行的。
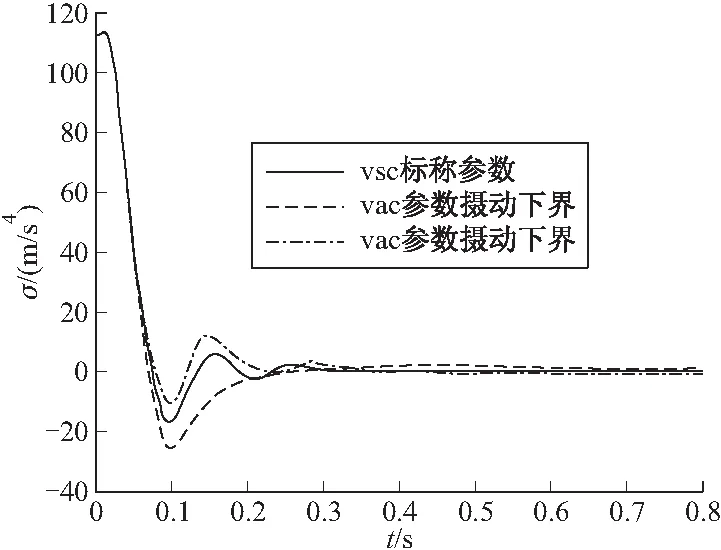
圖9 切換面函數(shù)對(duì)比曲線
圖7~圖8的控制量和加速度誤差積分控制增益曲線表明:控制增益的切換并未造成控制量的頻繁抖動(dòng),體現(xiàn)了切換增益變結(jié)構(gòu)控制的優(yōu)點(diǎn)。
圖9中的切換面函數(shù)曲線表明:在有限的過渡過程時(shí)間內(nèi)切換面函數(shù)收斂于0,系統(tǒng)進(jìn)入穩(wěn)態(tài),滿足一類戰(zhàn)術(shù)導(dǎo)彈駕駛儀的使用需求。
4 結(jié)論
文中采用切換增益變結(jié)構(gòu)控制方法提高了經(jīng)典三回路自動(dòng)駕駛儀的性能,系統(tǒng)閉環(huán)響應(yīng)對(duì)參數(shù)變化不敏感,增益切換并未造成控制量的頻繁切換。采用增益調(diào)度技術(shù)可以很方便實(shí)現(xiàn)全空域的控制器設(shè)計(jì),貼近工程實(shí)際需求。仿真結(jié)果表明了設(shè)計(jì)方法的正確性和控制器的有效性。
[1] MRACEK C P, RIDGELY D B. Missile longitudinal autopilot: comparison of multiple three loop topologies [C]∥ AIAA Guidance, Navigation, and Control Conference and Exhibit, 2005.
[2] 李友年, 鄭鹍鵬, 陳星陽. 三回路過載駕駛儀的快速性極限分析 [J]. 彈箭與制導(dǎo)學(xué)報(bào), 2013, 33(3): 17-20.
[3] 李友年, 賈曉洪. 一種直接力/氣動(dòng)力復(fù)合控制自動(dòng)駕駛儀的設(shè)計(jì)方法 [J]. 彈箭與制導(dǎo)學(xué)報(bào), 2005, 25(2): 1-3.
[4] 張記華, 張春明, 劉劍鋒. 防空導(dǎo)彈側(cè)向姿態(tài)變結(jié)構(gòu)控制器研究 [J]. 上海航天, 2005(4): 23-26.
[5] SIOURIS G M. Missile guidance and control system [M]. NewYork: Springer-Verlag, 2004: 137-140.
[6] 朱敬舉, 祁載康, 夏群力. 變結(jié)構(gòu)控制方法及其在導(dǎo)彈駕駛儀設(shè)計(jì)中的應(yīng)用問題 [J]. 飛航導(dǎo)彈, 2007(2): 30-33.
Missile Autopilot Design Based on Switching-gain Variable Structure Control
ZHAO Yanhui,YAN Liang,ZHANG Gongping
(System Control Institute, China Airborne Missile Academy, Henan Luoyang 471009, China)
A pitch plane switching-gain variable structure autopilot was designed for a missile controlled by aero tails to improve the performance of classical three-loop autopilot. The close-loop response is insensitive to parameter variation of missile body by applying switching-gain variable structure methodology. The control signal is smooth without high-frequency oscillation which is disadvantageous for actuators. The controllers for all flight envelopes can be easily achieved when gain-scheduling is used. The simulation result shows that the design method is valid.
autopilot; variable structure control; switching gain; flight control system
2015-09-12
趙艷輝(1982-),男,河北圍場(chǎng)人,工程師,研究方向:空空導(dǎo)彈自動(dòng)駕駛儀設(shè)計(jì)與仿真。
TJ76
A
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50