一種差動無級變速式拖動系統設計與分析
2016-03-02 07:14:04李明濤張清桂孫小超孔祥國
制造業自動化 2016年4期
關鍵詞:系統
李明濤,張清桂,孫小超,孔祥國,周 文
(1.西北機電工程研究所,咸陽 712099;2.陜西赫力機械工程有限責任公司,西安 712099)
0 引言
隨著我國工業發展,各種機械電子設備功率不斷增加,傳統拖動方式已經不能滿足當今社會生產發展需要,應運而生的各種軟啟動控制裝備逐步得到了廣泛應用[1,2],特別是針對冶金、煤炭、采礦、港口、石油等行業中大量使用的帶式傳輸機以及脈沖功率應用中的大功率儲能飛輪等重載拖動需求催生了多種機電式拖動裝置[3~9]。
文獻3至文獻8采用了以差動行星輪變速箱為基本組成的拖動系統,文獻9采用滑差控制系統實現了異步電動機恒定子電流啟動方式,這些方案均是針對重載、中低速的使用場合,顯然不合適高速、中型載荷的使用環境。
文中以普通三相異步電動機、差動行星輪變速機構和渦流制動器為基本組件,建立了一種適合高速、中型載荷的拖動系統,該系統具有組成簡單,成本低,可靠性高的優點,滿足了拖動高轉速、大轉動慣量轉子的技術需求。
1 高速中載拖動系統的結構及其特點
1.1 拖動系統的組成和結構
拖動系統由三相異步電動機、差動行星輪變速箱、制動器和控制回路組成,具體如圖1所示。
1.2 工作原理及功能
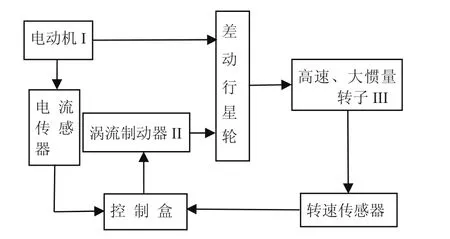
圖1 差動行星輪拖動系統框圖
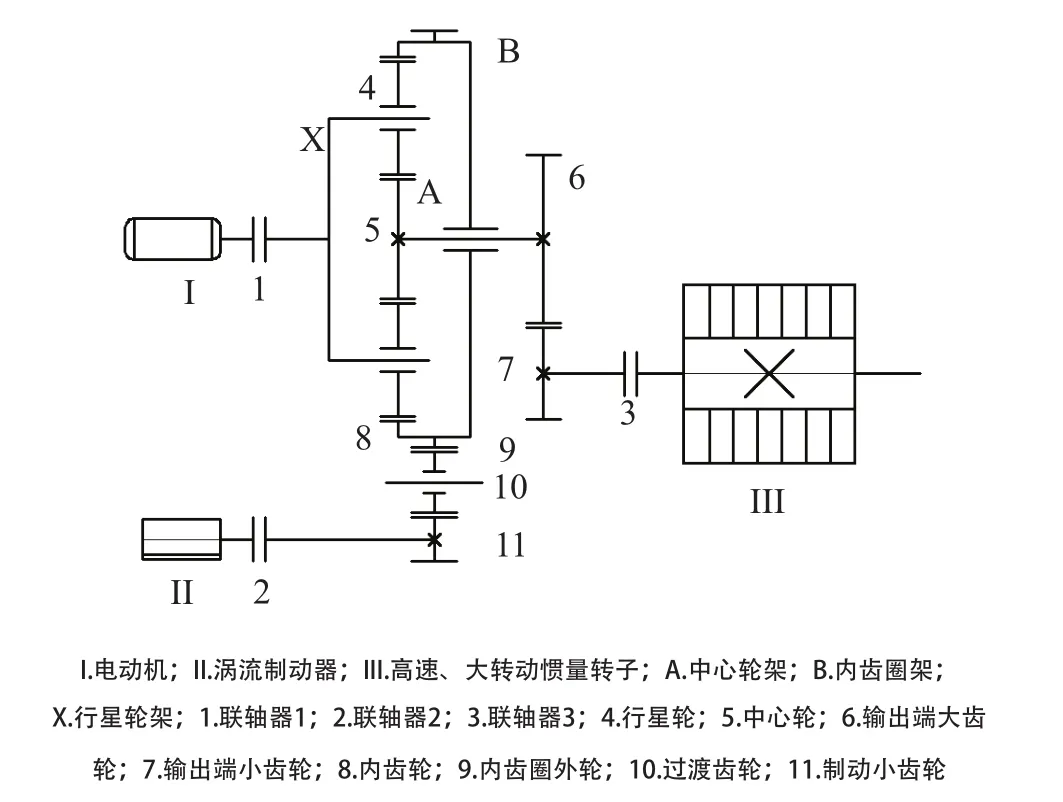
圖2 機械傳動原理圖
拖動系統原理如圖2所示,其中三相異步電動機I作為動力源與差動行星輪變速機構的行星輪架X通過聯軸器1連接,渦流制動器II作為扭矩控制端通過聯軸器2與差動行星輪變速機構的制動小齒輪11連接,高速、大慣量轉子III作為拖動對象通過聯軸器3與差動行星輪變速機構輸出端小齒輪7連接。
拖動系統剛開始工作時,渦流制動器II處于非工作狀態,三相異步電動機I直接啟動并帶動行星輪架X很快至電動機額定轉速附近,此時輸出端高速、大慣量轉子III由于加速困難而處于轉速極低狀態,而制動端渦流制動器II相當于按照中心輪A固定時的定比傳動提升轉速。
待三相異步電動機I完全啟動至工作轉速后,渦流制動器II開始工作并施加制動扭矩使差動行星輪變速機構制動小齒輪11制動減速,而電動機轉速在制動過程中保持基本不變,從而使得高速、大慣量轉子III獲得加速動力。
整個拖動系統只有一個三相異步電動機I作為動力源,而渦流制動器II施加制動扭矩屬于被動作功,這一過程會造成電動機輸出功率增加。為了保證電動機一直工作在額定功率以下,系統中增加了電流傳感器對電動機是否過載進行檢測;與此同時,系統中增加了轉速傳感器對高速、大慣量轉子III進行轉速檢測,以保證輸出端在沒有到達設定轉速前保持持續動力。
2 差動行星輪變速機構傳動比計算
[10]知,圖2所示為NGW差動行星輪系,其各基本構件的轉速關系為:
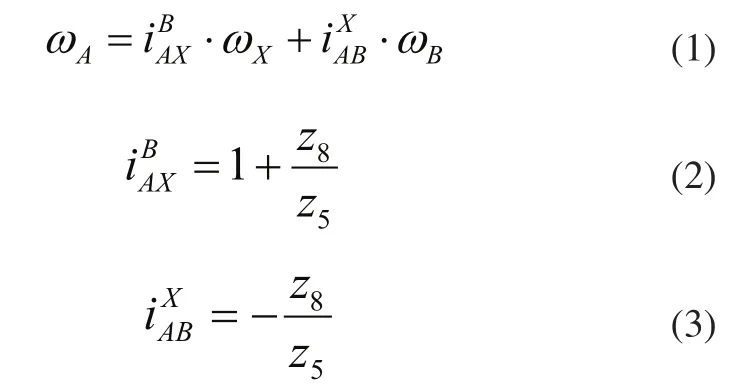
其中: ωA, ωX和 ωB分別表示差動輪系中心輪架A,行星輪架X和內齒圈架B的轉速。為將內齒圈架X固定時中心輪架A與行星輪架X的傳動比;為將行星輪架X固定時中心輪架A與內齒圈架X的傳動比。
因為:

將式(2)至(7)代入式(1)可得:

3 拖動系統穩態時轉速求解
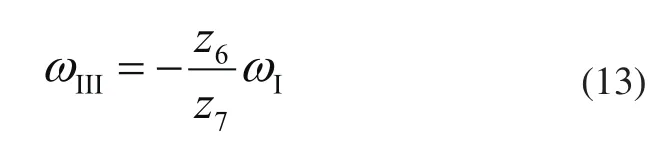
電動機I啟動時,在電動機輸出扭矩TD作用下行星輪架X以轉速Iω逆時針轉動,并拖動中心輪5和內齒輪8同向運動。因此可以得到各個部分的轉動方向,如圖3所示。
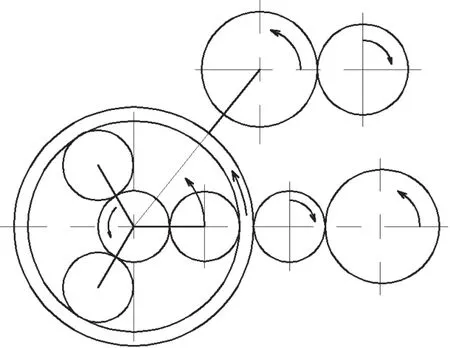
圖3 差動行星輪各旋轉部分轉向圖
設行星輪架X對行星輪作用力為F,中心輪5和內齒輪8對行星輪4的作用分別為F1和F2,則不計行星輪轉動慣量、忽略阻尼時行星輪受力如圖4所示,即有:


圖4 行星輪受力圖
穩態時由于輸出端和制動端都沒有外力矩,各個齒輪依靠慣性維持旋轉,彼此之間沒有力的相互作用,因此平衡態時F=F1=F2=0。即中心輪5和內齒輪8的自轉轉速與行星輪的公轉轉速相同,即:

利用式(5)、式(6)和式(7)即可求得穩態時制動端和輸出端轉速:

4 拖動系統動力計算
因為高速、大慣量轉子III轉動慣量遠遠大于拖動系統中其他旋轉件的轉動慣量,所以加速輸出端III遠比加速制動器II困難,當電動機I達到穩定轉速Iω時,輸出端轉速ωIII非常低。
為了便于分析,設當電動機I轉速穩定至Iω附近后在制動端II施加制動扭矩Tz,此時F2作用下的內齒圈B與制動端II為定軸傳動,因此易知:

傳動過程中F1作用下的中心輪5與高速、大慣量轉子III為定軸傳動,因此有:

因為F=F1+F2,可以得出制動端II與輸出端III的動力關系:

制動時行星輪公轉轉速Iω基本不變,行星輪架X處于扭矩平衡狀態,忽略阻尼時因此容易得到:

將式(9)、式(10)及式(14)代入式(17)可得電動機功率TD與制動扭矩Tz之間的關系:

因此,電機功率PI為:

將式(16)代入式(18)可得輸出端TIII關于電機功率PI的動力關系:

5 效率分析
不計系統阻尼時,電動機做功用于轉子III的驅動和制動端制動消耗,根據能量守恒有:


將式(16)和式(22)代入式(21)可得:
輸出端功率 PIII=TIII·ωIII,因此,拖動效率為:

6 某型高速重載機械拖動系統組建
6.1 拖動系統設計
某型高速、大慣量轉子I I I轉動慣量JIII約為30kgm2,要求在10分鐘內將轉子轉速升至8000轉/分,針對此項技術需求進行了拖動系統搭建,其參數分別為:
三相異步電動機選型為Y2-315M-2,額定功率為132kW,額定電流為233A,額定轉速為2980轉/分,采用Y型接法;渦流制動器型號為DWZ-400;差動行星輪變速機構參數如表1所示。

表1 差動行星輪變速機構齒輪參數表
6.2 動力計算
將表1中所示參數代入式(8)中即可求得電動機轉速Iω、制動器轉速IIω和轉子III轉速ωIII之間的函數關系,即:

電動機直接啟動后,制動器未加載制動扭矩時,轉子III轉速非常低,若令 ωIII≈0,則根據電動機轉速ωI≈2980轉/分,即可求得此時制動端轉速ωII≈4624轉/分;當轉子III被拖動至ωIII=-8000轉/分時,即可求得制動端轉速ωII≈1123轉/分。
因此,將轉子III拖動至-8000轉/分時,制動器工作時需要將制動端轉速從4624轉/分降至1123轉/分。
將轉子III轉動慣量和表1中相關參數代入式(20),即可求得電機額定功率時輸出端、制動端的扭矩TII=272N.m,TIII=119N.m,無阻尼時拖動時間為3.6分鐘。
6.3 效率分析
將 ωI=2980轉/分和代入式(24)中可得:

將Iω=4000轉/分和Iω=8000轉/分代入后,可得平均效率和最高效率分別為37.7%和75.5%。
7 結束語
利用普通三相異步電動機、差動行星輪變速機構、制動器和控制回路構建的拖動系統,不僅具有成本低、性能可靠的優點,合理分配傳動比也可以獲得很高的潛在效率,在實際設計中,為了保證效率應該充分考慮系統阻尼的影響。
參考文獻:
[1] 朱國勇.機械電子式軟啟動裝置控制系統設計[J].裝備制造技術,2013(2).
[2] 何明睿.電機軟啟動在煤礦中的應用研究[J].煤炭技術, 2012,31(7):41-42.
[3] 趙江平.機械電子式軟起動裝置設計分析[J].機電工程技術,2012,39(12):91-93.
[4] 趙江平.帶傳動軟啟動裝置蝸桿的優化設計[J].機械傳動,2011,35(08):44-48.
[5] 張淳,李志愿,吉濤,等.控制式差動無級變速器調速控制方案的研究[J].制造業自動化,2012,34(1):128-130.
[6] 牟宗魁.大型帶式傳輸機軟啟動裝置的性能比較與分析[J].機電工程技術,2012,41(03):84-87.
[7] 姜雪,包繼華,于巖,等.行星機構軟啟動裝置工作原理及應用[J].礦山機械,2010,38(24),51-54.
[8] 馬燕平,芮延年.一種新型行星式軟啟動技術裝置的研究[J]. 現代制造工程,2013(1).
[9] 彭建飛,宣偉民,王海兵等.HL-2A裝置大功率電動飛輪脈沖發電機組啟動過程分析和建模[J].中國核學會2011年學術年會.中國核學會2011年學術年會論文集第7冊(脈沖功率技術及其應用分卷):11-18.
[10] 饒振剛.行星輪傳動設計[M].化學工業出版社.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32