行人過(guò)街信號(hào)控制路口交通噪聲預(yù)測(cè)模型*
2016-03-13 01:20:04李鋒蔡銘
環(huán)境污染與防治 2016年2期
李 鋒 蔡 銘
(1.廣東技術(shù)師范學(xué)院汽車學(xué)院,廣東 廣州 510665;2.中山大學(xué)工學(xué)院,廣東省智能交通系統(tǒng)重點(diǎn)實(shí)驗(yàn)室,廣東 廣州 510006)
城市交通噪聲污染是影響人們生活和工作的重要環(huán)境問(wèn)題之一。對(duì)道路交通噪聲的預(yù)測(cè)是科學(xué)防治交通噪聲的重要基礎(chǔ)工作。道路交通噪聲預(yù)測(cè)模型是計(jì)算和評(píng)估交通噪聲污染程度的主要工具。長(zhǎng)期以來(lái),國(guó)內(nèi)外學(xué)者在道路交通噪聲預(yù)測(cè)方面做了大量的研究工作,并建立了各種有效的交通噪聲預(yù)測(cè)模型[1-5]。早期的大部分模型均是在車輛勻速行駛的假設(shè)條件下建立起來(lái),在車輛速度變化不大的道路上已達(dá)到了較高的預(yù)測(cè)準(zhǔn)確度,但直接應(yīng)用在道路交叉口等車輛速度變化較大的局部路段仍有一定誤差。因此,越來(lái)越多的學(xué)者開(kāi)始關(guān)注車輛加、減速頻繁的局部路段的交通噪聲預(yù)測(cè)模型和噪聲變化規(guī)律。如林郁山等[6]、蔡銘等[7]考慮車輛加、減速的影響,采用實(shí)驗(yàn)方法建立了車輛噪聲源排放模型;MAKAREWICZ等[8-10]針對(duì)車速限制和減速帶等因素的影響,建立了間斷交通流交通噪聲預(yù)測(cè)模型;王波等[11]、常玉林等[12]、王超等[13]、ABO QUDAIS等[14]分析了道路交叉口交通流的特點(diǎn),提出了信號(hào)控制十字交叉口交通噪聲預(yù)測(cè)模型; COVACIU等[15]、蔡銘等[16]考慮車輛曲線行駛的特性,建立了環(huán)形交通口噪聲預(yù)測(cè)模型。行人過(guò)街信號(hào)控制路口是城市常見(jiàn)的道路形態(tài)之一,然而國(guó)內(nèi)對(duì)這種路口交通噪聲預(yù)測(cè)模型的研究仍不多見(jiàn)。
本研究在考慮車輛加、減速狀態(tài)下噪聲排放的基礎(chǔ)上,根據(jù)行人過(guò)街信號(hào)控制路口交通流的運(yùn)行特性,利用能量疊加原理建立行人過(guò)街信號(hào)控制路口交通噪聲預(yù)測(cè)模型,然后采用實(shí)驗(yàn)數(shù)據(jù)對(duì)模型進(jìn)行驗(yàn)證,并在此基礎(chǔ)上進(jìn)一步探討該類路口交通噪聲的分布規(guī)律。
1 模型的建立
1.1 單輛車的噪聲計(jì)算
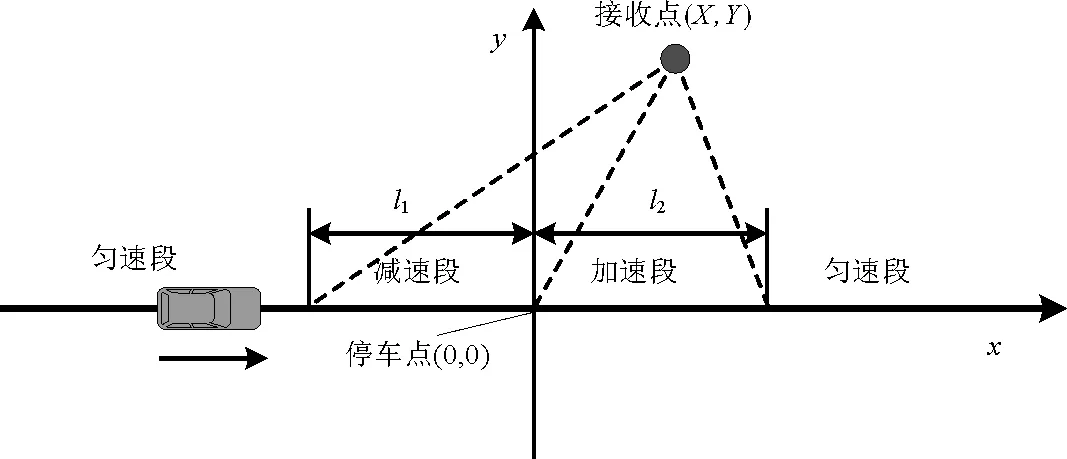
圖1 車輛行駛階段的坐標(biāo)轉(zhuǎn)化Fig.1 Coordinate transformation of vehicle traveling process
車輛通過(guò)信號(hào)控制路口的過(guò)程可簡(jiǎn)化為兩種情況:若車輛到達(dá)路口時(shí)恰好為綠燈時(shí)間,則車輛按原來(lái)的速度勻速通過(guò);若車輛到達(dá)路口時(shí)為紅燈時(shí)間,則車輛必須經(jīng)過(guò)勻速、減速、停車、加速、再勻速行駛的過(guò)程,對(duì)此過(guò)程進(jìn)行坐標(biāo)轉(zhuǎn)化(見(jiàn)圖1),令停車點(diǎn)處的坐標(biāo)為(0,0),停車點(diǎn)上游減速段長(zhǎng)度為l1m,停車點(diǎn)下游加速段長(zhǎng)度為l2m,預(yù)測(cè)任一時(shí)刻接收點(diǎn)(X,Y)處的噪聲。
車道上的單個(gè)車輛可看作半自由聲場(chǎng)的點(diǎn)聲源,忽略空氣吸收和障礙物的影響,對(duì)于勻速通過(guò)的車輛,接收點(diǎn)(X,Y)處的噪聲可表示為:

(1)
式中:LpC,i(X,Y)為接收點(diǎn)(X,Y)處的噪聲,dB(A);i為車型;LC,i為單輛車勻速行駛時(shí)在參照點(diǎn)的噪聲,dB(A);r0為車輛距參照點(diǎn)的距離,m,根據(jù)《公路建設(shè)項(xiàng)目環(huán)境影響評(píng)價(jià)規(guī)范》(JTG B03—2006),r0取7.5 m;v為勻速通行的車速,m/s;t為車輛相對(duì)于停車點(diǎn)的行駛時(shí)間,s。
將道路近似看作無(wú)限長(zhǎng),則單輛車勻速通過(guò)時(shí),接收點(diǎn)(X,Y)的等效聲級(jí)為:

(2)
式中:Leq1,i(X,Y)為單輛車勻速通過(guò)時(shí)對(duì)接收點(diǎn)(X,Y)產(chǎn)生的等效聲級(jí),dB(A);T為計(jì)算時(shí)間,s。
對(duì)于需停車的車輛,接收點(diǎn)(X,Y)的等效聲級(jí)由以下幾個(gè)過(guò)程組成:
(1) 勻速段等效聲級(jí):

(3)
式中:LeqC,i(X,Y)為單輛車在勻速段行駛時(shí)對(duì)接收點(diǎn)(X,Y)產(chǎn)生的等效聲級(jí),dB(A)。
(2) 減速段等效聲級(jí):

(4)
式中:LeqD,i(X,Y)為單輛車在減速段行駛時(shí)對(duì)接收點(diǎn)(X,Y)產(chǎn)生的等效聲級(jí),dB(A);LD,i為車輛行駛時(shí)在參考距離r0處的噪聲,dB(A);v減為減速段的平均車速,m/s。
(3) 停車怠速時(shí)的等效聲級(jí):

(5)
式中:LeqS,i(X,Y)為單輛車在停車怠速時(shí)對(duì)接收點(diǎn)(X,Y)產(chǎn)生的等效聲級(jí),dB(A);LS,i為單輛車停車怠速時(shí)在參考距離r0處的噪聲,dB(A);tS為停車時(shí)間,s。
(4) 加速段等效聲級(jí):

(6)
式中:LeqA,i(X,Y)為單輛車在加速段行駛時(shí)對(duì)接收點(diǎn)(X,Y)產(chǎn)生的等效聲級(jí),dB(A);LA,i為單輛車加速行駛時(shí)在參考距離r0處的噪聲,dB(A);v加為加速段的平均車速,m/s。
因此,對(duì)于需停車的車輛,單輛車在整個(gè)行駛過(guò)程中,接收點(diǎn)(X,Y)的等效聲級(jí)(Leq2,i(X,Y),dB(A))為:
Leq2,i(X,Y)=10lg(100.1LeqC,i(X,Y)+100.1LeqD,i(X,Y)+
100.1LeqS,i(X,Y)+100.1LeqA,i(X,Y))
(7)
1.2 單向單車道的噪聲計(jì)算
在不出現(xiàn)二次排隊(duì)的情況下,一個(gè)信號(hào)周期內(nèi)需停車的車輛數(shù)為:
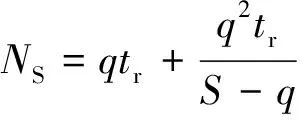
(8)
式中:NS為一個(gè)信號(hào)周期內(nèi)需停車的車輛數(shù),輛;q為車輛平均到達(dá)率,輛/s;tr為紅燈時(shí)間,s;S為飽和流量,輛/s。
一個(gè)信號(hào)周期內(nèi)可直接通行的車輛數(shù)為:
NC=q(tr+tg)-NS
(9)
式中:NC為一個(gè)信號(hào)周期內(nèi)可直接通行的車輛數(shù),輛;tg為綠燈時(shí)間,s。
在停車排隊(duì)的車輛中,第j輛車的停車時(shí)間為:
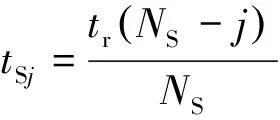
(10)
式中:tSj為停車車輛中第j輛車的停車時(shí)間,s。
設(shè)第i種車型的流量比例為pi,共有w種車型,則一個(gè)信號(hào)周期內(nèi),可直接通行車輛的等效聲級(jí)為:

(11)
式中:LeqCC(X,Y)為一個(gè)信號(hào)周期內(nèi)直接通行車輛對(duì)接收點(diǎn)(X,Y)處產(chǎn)生的等效聲級(jí),dB(A)。
對(duì)于停車排隊(duì)的車輛,由于各車的停車位置和停車時(shí)間不同,假設(shè)停車排隊(duì)時(shí)的車輛間距為dm,則第j輛車對(duì)接收點(diǎn)(X,Y)產(chǎn)生的等效聲級(jí)可以用(X+j·d,Y)代替式(7)中的(X,Y)進(jìn)行計(jì)算。其中,在單輛車停車怠速等效聲級(jí)計(jì)算時(shí),單輛車的停車時(shí)間根據(jù)式(10)計(jì)算。綜上,停車排隊(duì)的車輛在接收點(diǎn)(X,Y)產(chǎn)生的等效聲級(jí)為:
(12)
式中:LeqSC(X,Y)為停車排隊(duì)的車輛在接收點(diǎn)(X,Y)產(chǎn)生的等效聲級(jí),dB(A)。
單車道在一段時(shí)間內(nèi)(通常為1 h)的等效聲級(jí)為:
(13)
式中:LeqLane(X,Y)為單車道在一段時(shí)間內(nèi)對(duì)接收點(diǎn)(X,Y)處產(chǎn)生的等效聲級(jí),dB(A);tC為信號(hào)周期,s。
1.3 雙向多車道的噪聲計(jì)算
對(duì)于雙向多車道的道路,以道路中心線為x軸,兩停車線距離的中點(diǎn)為坐標(biāo)原點(diǎn)建坐標(biāo)系(見(jiàn)圖2),假設(shè)兩停車線之間的距離為lm;道路中心線到第一車道的距離為d0m;車道寬度為dLm。由于坐標(biāo)改變,可用(X+l/2,Y+d0+(n-1)dL)代替式(13)中的(X,Y),得到正向第n車道的噪聲。由于正向和反向車道具有中心對(duì)稱性,因此可用坐標(biāo)變換的方法計(jì)算反向車道的噪聲。反向第n車道的噪聲則可用(-X+l/2,-Y+d0+(n-1)dL)代替式(13)中的(X,Y)進(jìn)行計(jì)算。因此,雙向多車道對(duì)接收點(diǎn)(X,Y)產(chǎn)生的等效聲級(jí)為:

(14)
式中:Leq(X,Y)為雙向多車道對(duì)接收點(diǎn)(X,Y)產(chǎn)生的等效聲級(jí),dB(A);m為單向車道數(shù)。
2 模型驗(yàn)證
對(duì)廣州市新港東路某行人過(guò)街信號(hào)控制路口的交通流量和交通噪聲進(jìn)行測(cè)量,測(cè)量時(shí)間為上午9:00—12:00。共布設(shè)11個(gè)監(jiān)測(cè)點(diǎn)平行于道路分布,監(jiān)測(cè)點(diǎn)間的距離為30 m,監(jiān)測(cè)點(diǎn)高度均為1.2 m,如圖2所示。該道路為雙向8車道,車道寬度約3.5 m。交通流受兩方向的交通信號(hào)控制,綠燈時(shí)間為50 s,紅燈時(shí)間為40 s。交通噪聲采用CENTER322型聲級(jí)計(jì)進(jìn)行測(cè)量,每隔1 s記錄一次A計(jì)權(quán)聲級(jí)。用測(cè)速計(jì)測(cè)得該道路的平均車速為61.2 km/h。交通量采用人工計(jì)數(shù)法進(jìn)行統(tǒng)計(jì),結(jié)果如表1所示。
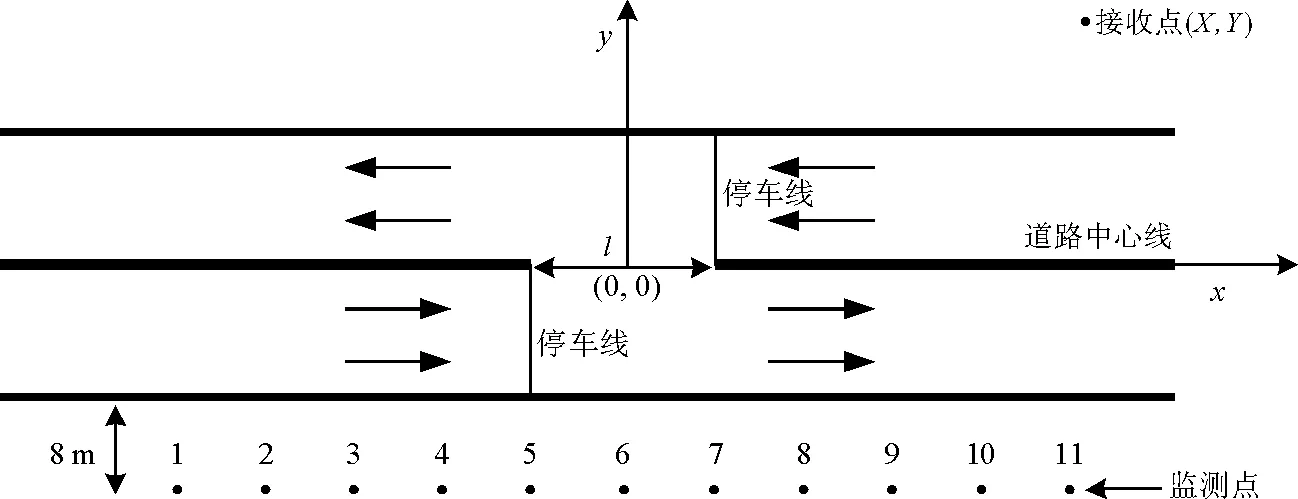
圖2 雙向多車道坐標(biāo)轉(zhuǎn)化Fig.2 Coordinate transformation of multilane two-way streets

表1 交通量統(tǒng)計(jì)
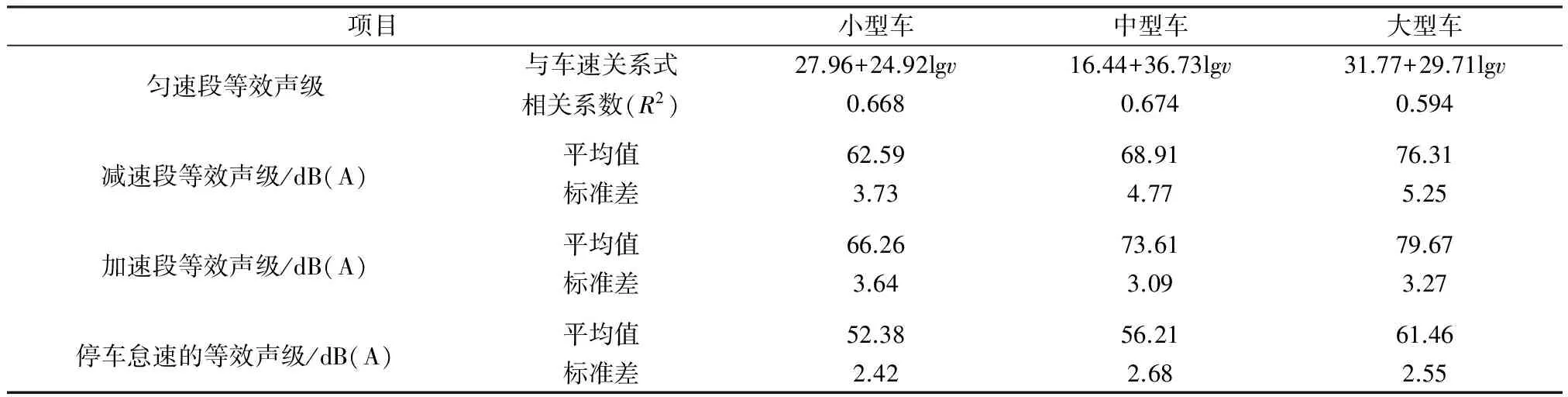
表2 車輛噪聲排放測(cè)量結(jié)果
在前期工作中,對(duì)大型車、中型車、小型車3種車型的車輛在勻速、加速、減速和停車時(shí)排放的噪聲進(jìn)行了實(shí)驗(yàn)測(cè)量,結(jié)果如表2所示[17]。
為比較本模型(以下簡(jiǎn)稱信號(hào)控制路口模型)與不考慮車輛加、減速影響的長(zhǎng)直道路交通噪聲預(yù)測(cè)模型[18](以下簡(jiǎn)稱長(zhǎng)直道路模型)的差別,用實(shí)測(cè)的車流量、車流速度、信號(hào)周期等參數(shù)分別代入2個(gè)模型進(jìn)行計(jì)算。計(jì)算時(shí)間取1 h,飽和流量取1 800 輛/h,加速段和減速段的長(zhǎng)度均設(shè)為80 m,單輛車的噪聲排放按表2進(jìn)行計(jì)算。
將兩種模型預(yù)測(cè)的監(jiān)測(cè)點(diǎn)等效聲級(jí)計(jì)算結(jié)果與實(shí)測(cè)值進(jìn)行對(duì)比,結(jié)果如圖3所示。可以看出,由于車輛行駛速度的變化,路口附近噪聲也有不同程度的起伏。不考慮車輛加、減速影響的長(zhǎng)直道路模型不能反映路口附近的噪聲變化,而本研究構(gòu)建的信號(hào)控制路口模型預(yù)測(cè)與實(shí)測(cè)值吻合相對(duì)較好。信號(hào)控制路口模型對(duì)路口上游(負(fù)坐標(biāo)段)停車線附近(-60~-30 m)噪聲的預(yù)測(cè)值普遍低于實(shí)測(cè)值,原因可能由小部分車輛在停車線附近鳴笛引起。另外,部分車輛剎車時(shí)產(chǎn)生的噪聲也將導(dǎo)致實(shí)測(cè)值偏高。此外,信號(hào)控制路口模型在路口上游段的預(yù)測(cè)效果較好,預(yù)測(cè)值與實(shí)測(cè)值較一致,而在路口下游段(正坐標(biāo)段),預(yù)測(cè)值比實(shí)測(cè)值高,最大誤差約3 dB(A)。主要原因有兩方面:一是路口下游段模型計(jì)算輸入的車速與實(shí)際車速可能存在一定偏差,即實(shí)際車輛經(jīng)過(guò)短距離的加速后車速未達(dá)到61.2 km/h;二是實(shí)測(cè)路口上游車輛排隊(duì)經(jīng)過(guò)路口時(shí),交通量均勻分布在各車道,通過(guò)路口后部分車輛為獲得較快速度而變道進(jìn)入超車道,使路口下游靠近噪聲傳感器的右側(cè)車道車流量較小,而信號(hào)控制路口模型未考慮車輛變道問(wèn)題。
將信號(hào)控制路口模型與長(zhǎng)直道路模型進(jìn)行比較,并按圖2所示的坐標(biāo)系,根據(jù)兩模型預(yù)測(cè)值的差值繪制等值線圖,如圖4所示。
由圖4可見(jiàn),與長(zhǎng)直道路模型相比,信號(hào)控制路口模型的計(jì)算結(jié)果在減速段和加速段附近均有不同程度的降低,其中減速段附近噪聲降低明顯(約3 dB(A)),在兩個(gè)方向的停車區(qū)域出現(xiàn)了關(guān)于坐標(biāo)原點(diǎn)呈中心對(duì)稱的“凹陷區(qū)”,而加速段附近噪聲則下降較少。由此可知,利用長(zhǎng)直道路模型預(yù)測(cè)行人過(guò)街信號(hào)控制路口的交通噪聲是不適宜的。
3 結(jié) 語(yǔ)
根據(jù)能量疊加原理和交通流相關(guān)理論建立信號(hào)控制路口噪聲預(yù)測(cè)模型,經(jīng)與實(shí)測(cè)數(shù)據(jù)檢驗(yàn),該模型總體能正確反映路口附近車輛的加、減速給交通噪聲帶來(lái)的影響。與不考慮車輛加、減速影響的長(zhǎng)直道路模型相比,信號(hào)控制路口模型的計(jì)算結(jié)果更接近實(shí)測(cè)值。根據(jù)信號(hào)控制路口模型預(yù)測(cè)結(jié)果,由于車輛速度下降的原因,行人過(guò)街信號(hào)控制路口減速段附近的噪聲有約3 dB(A)的下降,在兩個(gè)方向的停車區(qū)域出現(xiàn)了關(guān)于坐標(biāo)原點(diǎn)呈中心對(duì)稱的“凹陷區(qū)”,而加速段附近噪聲則下降較少。
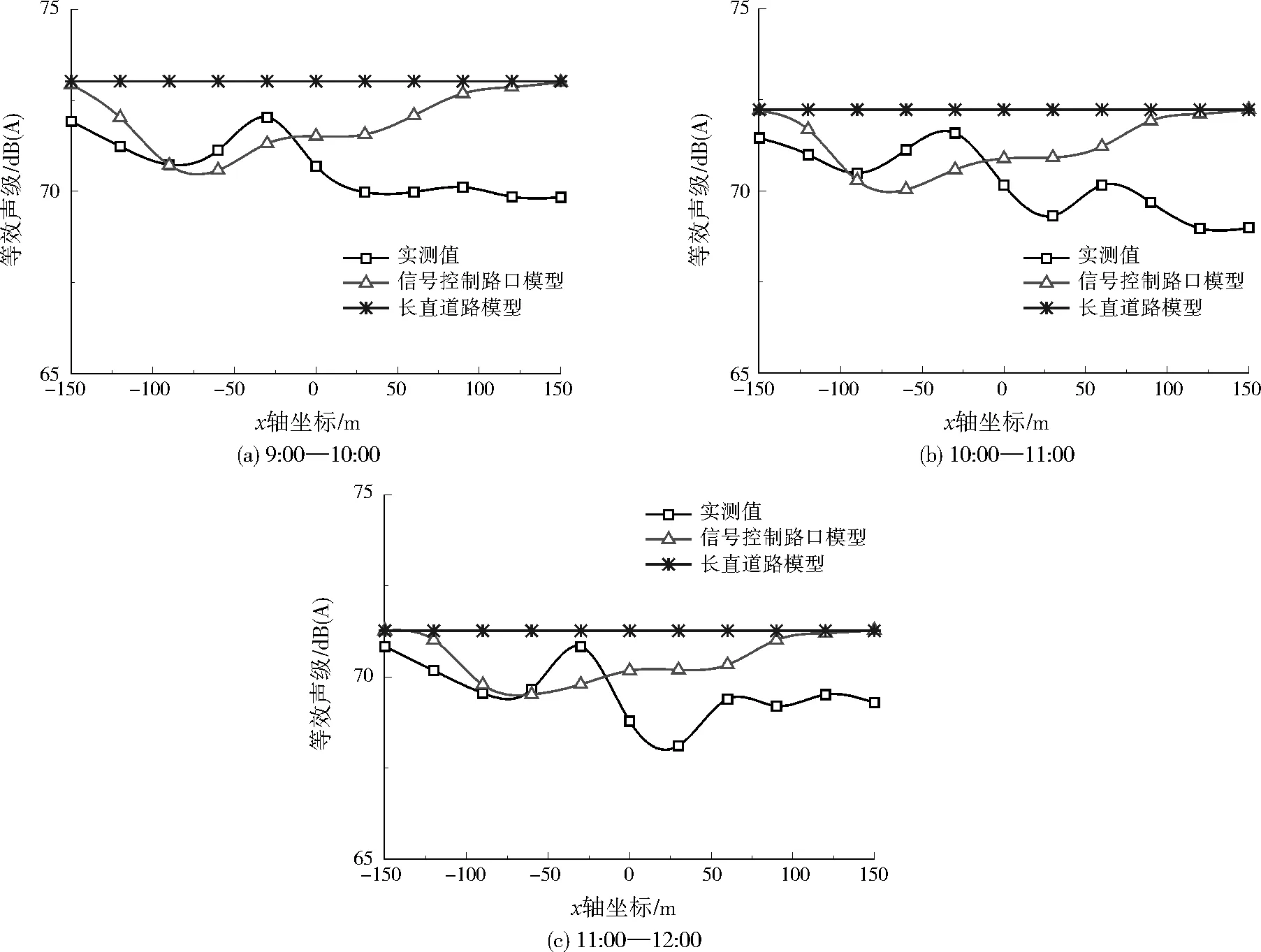
圖3 預(yù)測(cè)值與實(shí)測(cè)值比較Fig.3 Comparison of predicted values and measured values
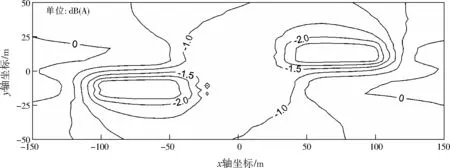
圖4 差值分布Fig.4 Distribution of difference
[1] STEELE C.A critical review of some traffic noise prediction models[J].Applied Acoustics,2001,62(3):271-287.
[2] Federal Highway Administration.FHWA traffic noise model technical manual[EB/OL].[2015-07-20].http://www.fhwa.dot.gov/environment/noise/traffic_noise_model/old_versions/tnm_version_10/tech_manual/TNM10TechManual.pdf.
[3] TSUKUI K,OSHINO Y,BLOKLAND G V,et al.Study of the road traffic noise prediction method applicable to low-noise road surfaces[J].Acoustical Science & Technology,2010,31(1):102-112.
[4] CHO D S,MUN S.Development of a highway traffic noise prediction model that considers various road surface types[J].Applied Acoustics,2008,69(11):1120-1128.
[5] 張玉芬,錢炳華,戴明新.交通運(yùn)輸與環(huán)境保護(hù)[M].北京:人民交通出版社,2003.
[6] 林郁山,蔡銘,李鋒.考慮加速度的交通噪聲源強(qiáng)研究[J].應(yīng)用聲學(xué),2012(4):282-286.
[7] 蔡銘,謝林華,張磊.考慮行駛狀態(tài)的水泥路機(jī)動(dòng)車噪聲排放模型[J].應(yīng)用聲學(xué),2015(2):175-182.
[8] MAKAREWICZ R,FUJIMOTO M,KOKOWSKI P.A model of interrupted road traffic noise[J].Applied Acoustics,1999,57(2):129-137.
[9] MAKAREWICZ R,KOKOWSKI P.Prediction of noise changes due to traffic speed control[J].The Journal of the Acoustical Society of America,2007,122(4):2074-2081.
[10] MAKAREWICZ R,KOKOWSKI P.Efficiency of noise reduction by a road speed bump[J].Archives of Acoustics,2007,32(3):631-642.
[11] 王波,王煒,劉浩.無(wú)控制交叉口交通噪聲分析[J].東南大學(xué)學(xué)報(bào)(自然科學(xué)版),2000,30(3):96-99.
[12] 常玉林,王煒,王春燕.道路交叉口交通噪聲預(yù)測(cè)模型研究[J].土木工程學(xué)報(bào),2003,36(1):75-79.
[13] 王超,蔡銘,丁建立.城市信號(hào)控制交叉口交通噪聲預(yù)測(cè)模型研究[J].環(huán)境科學(xué)與技術(shù),2015,38(6):252-257.
[14] ABO QUDAIS S,ALHIARY A.Statistical models for traffic noise at signalized intersections[J].Building and Environment,2007,42(8):2939-2948.
[15] COVACIU D,FLOREA D,TIMAR J.Estimation of the noise level produced by road traffic in roundabouts[J].Applied Acoustics,2015,98:43-51.
[16] 蔡銘,王璐,李鋒.考慮車流分布特性的環(huán)形交叉口交通噪聲預(yù)測(cè)模型[J].環(huán)境科學(xué)與技術(shù),2012,35(9):163-166.
[17] 李鋒.道路交通噪聲傳播衰減計(jì)算模型及動(dòng)態(tài)模擬研究[D].廣州:中山大學(xué),2011.
[18] 張玉芬.道路交通環(huán)境工程[M].北京:人民交通出版社,2001.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03