WP—7裝配夾具的Γ形結(jié)構(gòu)懸臂梁的設(shè)計
2016-03-15 08:09:35邵緒威宋斌周金鑫
山東工業(yè)技術(shù) 2016年6期
邵緒威 宋斌 周金鑫
摘 要:在航空發(fā)動機制造工業(yè)中,發(fā)動機裝配的準(zhǔn)確度往往由裝配工裝來保證,因此,裝配夾具在航空發(fā)動機部件裝配過程中起著非常重要的作用。采用合適的夾具,不但能保證裝配精度,縮短裝配時間,提高裝配效率,而且可以減輕工人的勞動強度。本文對渦噴-7航空發(fā)動機的盤軸裝配過程中的軸裝配夾具進行研究。設(shè)計了Γ形結(jié)構(gòu)懸臂梁;對所設(shè)計的夾具進行了強度分析和誤差計算,通過強度與和誤差分析計算,保證了設(shè)計的夾具滿足實際裝配工藝的要求。所完成的設(shè)計內(nèi)容對航空發(fā)動機轉(zhuǎn)子柔性裝配夾具的研究具有一定的借鑒價值。
關(guān)鍵詞:裝配工裝;Γ形懸臂梁;夾具設(shè)計
DOI:10.16640/j.cnki.37-1222/t.2016.06.094
0 引言
作為軸輸送裝置的重要組成部分,Γ形結(jié)構(gòu)懸臂梁在整個裝置中起到了連接床身與工作部件(換向裝置、夾具)的作用。因此懸臂梁結(jié)構(gòu)的設(shè)計成為決定夾具設(shè)計的一個關(guān)鍵。
1 WP-7航空發(fā)動機結(jié)構(gòu)分析
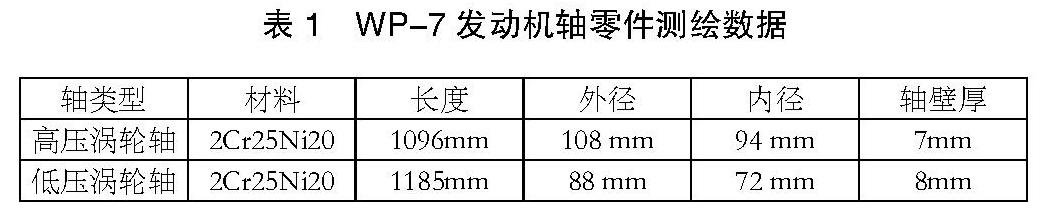
通過發(fā)動機設(shè)計圖紙及其高壓軸和低壓軸設(shè)計圖紙測繪得出數(shù)據(jù)如表1所示。
根據(jù)對WP-7低壓渦輪軸零件圖紙分析,可以對高壓軸渦輪軸進行簡化。簡化后得到的模型為一根外徑為108mm 內(nèi)徑為94mm,軸向長度為1100mm的空心長軸,并且設(shè)定在裝配過程中軸的剛性非常大,忽略軸向的彎曲變形。將低壓渦輪軸簡化模型為一根外徑為88mm內(nèi)徑為72mm,軸向長度為1200mm的空心長軸,并且設(shè)定軸的剛性非常大,忽略軸向彎曲變形。根據(jù)Catia仿真計算可以得出低壓軸渦輪軸簡化模型以下簡稱低壓軸模型)。
2 Γ形結(jié)構(gòu)懸臂梁的設(shè)計
根據(jù)對WP-7發(fā)動機高壓渦輪及低壓渦輪零件圖分析,提出了兩種設(shè)計方案。
方案一:使用規(guī)定尺寸的方鋼,其左端直接與Z軸運動的軌道板焊接形成一個組件,方鋼右端亦與工作部件焊接成為一體。
方案二:利用45鋼板進行彎板加工形成,然后在指定位置進行銑削、鉆孔及焊接加工成型。
由于方案一中方鋼的兩端與Z軸運動的軌道板及工作部件焊接在一起,容易產(chǎn)生梁的應(yīng)力集中,不便于維修檢測等諸多問題。因此,選用方案二的設(shè)計思路。Γ形結(jié)構(gòu)懸臂梁通過擠壓成型的方法使其為幾字形的截面形狀,并在左端鉆有與上下支承板相連接的螺栓孔,同時上下支承板亦與Z軸運動的軌道板通過螺栓、螺母等緊固件相連,確保懸臂梁能在Z軸方向上通過絲杠帶動進行精確運動,工作部件放置在右端的幾字形凹槽內(nèi)部。
3 有限元分析
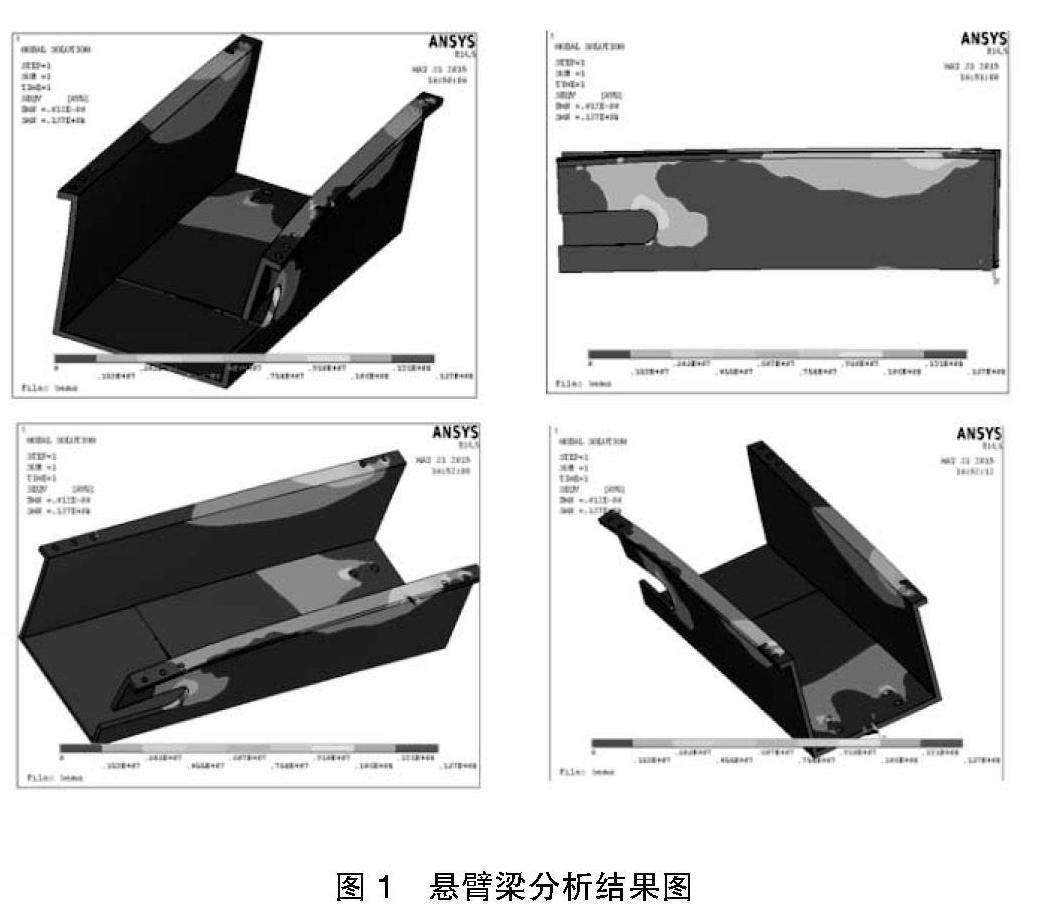
軟件ANSYS是融結(jié)構(gòu)、熱、流體、電磁和聲學(xué)與一體的大型CAE通用有限元分析軟件。由于懸臂梁結(jié)構(gòu)復(fù)雜,利用數(shù)學(xué)模型計算比較復(fù)雜,精度也不能得到很好的保證,故利用ANSYS有限元分析軟件,進行模擬分析。本次計算采用Catia進行懸臂梁建模,再利用ANSYS workbench的接口導(dǎo)入,模型傳遞過程中沒有元素丟失。網(wǎng)格全部為自動生成,在左端對梁加以矩形端固定約束,而右端對梁施加Z方向垂直向下的力,大小為換向裝置、夾具及軸的重量。根據(jù)裝配系統(tǒng)運行過程的實際受力情況模擬出該Γ形結(jié)構(gòu)懸臂梁的形變情況如圖1所示。根據(jù)ANSYS分析可以看出該梁在實際受力情況下的變形趨勢及應(yīng)力集中點的位置。應(yīng)力集中點在梁左端螺栓孔的位置及右端的U形缺口處。根據(jù)得出的分析圖可以看出該Γ形結(jié)構(gòu)懸臂梁的強度無大幅度變化符合設(shè)計使用要求。
4 總結(jié)
本文從選擇合適的軸輸送裝置的設(shè)計方案入手,通過從對轉(zhuǎn)子裝配系統(tǒng)結(jié)構(gòu)中的重要部分夾具開始對Γ形結(jié)構(gòu)的懸臂梁及伺服系統(tǒng)分別作了詳細的介紹說明。并運用力學(xué)及有限元的方法對換向裝置及Γ形結(jié)構(gòu)的懸臂梁的性能進行計算分析,驗證了所設(shè)計軸輸送裝置結(jié)構(gòu)設(shè)計的合理性。
參考文獻:
[1]航空制造工程手冊總編委員會.航空制造工程手冊[J].發(fā)動機機械加工,北京:航空工業(yè)出版社,1997.
[2]石宏.航空發(fā)動機裝配與維修[J].沈陽航空航天大學(xué),2008.
[3]透平機械現(xiàn)代制造技術(shù)叢書編委會.結(jié)構(gòu)件制造技術(shù)[J].北京: 科學(xué)出版社,2002.
[4]Gomes de Sa A,Zachmann G.Virtual Reality as a Tool for Verfication of Assembly and Maintenance Processes[J].Computers and Graphics,1999,23(03):389-403.
