中大功率航天電動伺服機構發展綜述
2016-03-16 05:37:09郭洪根王指國
導航定位與授時 2016年3期
關鍵詞:產品
郭洪根,王指國
(中國航天科工集團伺服技術研究所,南京 210006)
中大功率航天電動伺服機構發展綜述
郭洪根,王指國
(中國航天科工集團伺服技術研究所,南京 210006)
隨著新材料、新技術的發展,電動伺服機構在電傳飛機、先進飛行器、推力矢量控制中得到成功的應用。對中大功率航天電動伺服機構在國內外的研究及應用情況進行了介紹。通過分析,在國外電動伺服機構的運用已經相當成熟,在國內中大功率電動伺服機構在航天應用中已初具規模,出現逐步取代液壓伺服機構的趨勢。
姿態控制;電動伺服機構;航天;應用現狀
0 引言
伺服機構是導彈和火箭制導與控制系統的執行機構,通過帶動噴管或舵面擺動實現彈體的姿態控制(用于舵面控制的伺服機構常稱為 “舵機”)。伺服機構按照所使用的能源分類, 可分為氣動伺服機構、液壓伺服機構和電動伺服機構三大類。電動伺服機構通過電機直接將電能轉化為電機轉子旋轉運動形式的機械能,并通過傳動裝置帶動被控對象運動。電動伺服機構以簡單可靠、工藝性好、使用維護方便、能源單一、成本低廉、易于控制等特性引起了人們的廣泛關注和深入研究, 在導彈上得到了廣泛的應用。早期,電動伺服機構主要運用在輸出力矩小、功率等級低的小型導彈舵的控制中。例如:美國的標準RIM66 /67中遠程艦空導彈、毒刺FIM-92A肩射式近程防空導彈、復仇者近程低空防空導彈、AIM-120空空導彈、戰斧巡航導彈,法國的R530中距空空導彈、響尾蛇地空導彈、魔術R550空空導彈、海響尾蛇TSE5500近程艦對空導彈、超530F中程空空導彈、飛魚MM38岸對艦導彈、飛魚AM39空對艦導彈和霍特反坦克導彈,以色列的VIPER反坦克/反直升機導彈,瑞典的RBS70便攜式近程防空導彈,南非的短刀空空導彈等。隨著新材料、新技術以及大功率器件的發展,電動伺服機構的功率等級逐步提升,其動、靜態等綜合性能得到極大的提高。在電動伺服技術不斷深入研究的基礎上,歐美等航空大國的中大功率電動伺服機構已在先進飛行器和推力矢量控制中得到了廣泛的應用,并且取得成功。國內宇航用中大功率電動伺服機構的研制相對發展較晚,經過相關研制單位的不懈努力,目前中大功率電動伺服機構在航天型號中的應用已初具雛形。
1 國外中大功率航天電動伺服機構的發展
從20世紀70年代中期開始,美國空軍、海軍以及宇航局對電動伺服機構取代戰略導彈和航天飛機上液壓伺服機構進行了一系列可行性研究,到1985年設計出了取代原液壓伺服機構的電動伺服機構,得出“電動伺服機構的性能與相應的液壓伺服機構相當或更好”的結論。其中最具代表性的成功應用是從1993~1998年由美國空軍、海軍資助 NASA Dryden 研究中心進行的“F/A-18B戰機電動作動系統技術”課題的研究,這一課題重點研究“電動舵系統替代原有的液壓舵系統”[1-2],F/A-18B試驗用電動伺服系統如圖1所示。試驗結果表明,該電動伺服系統的跟隨性能優于原電液伺服系統,同時飛機在低速或高速連續翻滾時,機電作動器的頻域響應特性比液壓作動器的性能要好。

圖1 F/A-18B飛機上試驗用電動伺服系統Fig.1 The EMA applied on the F/A-18B plane
GOODRICH公司伺服機構研發部門為某型號導彈噴管推力矢量控制研發的一體化驅動電動伺服機構,該電動伺服機構采用伺服電機、行星滾柱絲杠、LVDT位置傳感器同軸一體化結構布局,結構示意圖和產品如圖2所示,主要性能指標見表1。其結構設計簡潔緊湊,緊固件少,集成度高。絲杠采用中空設計,電位器內置,為結構布局帶來了便利。
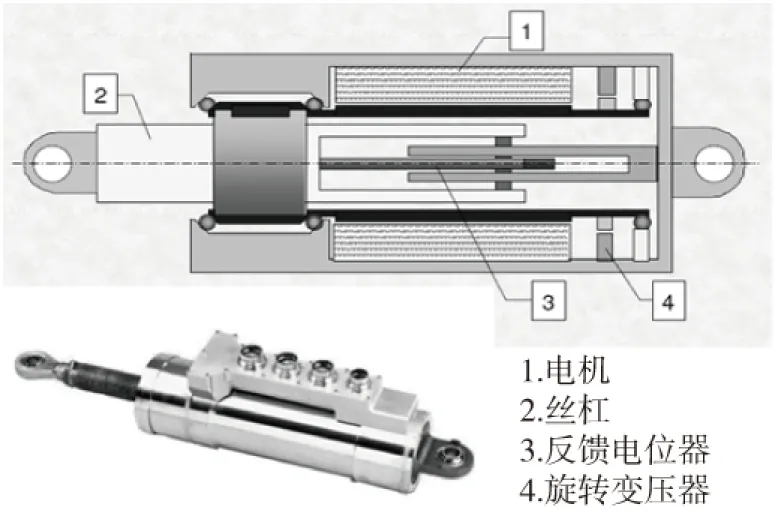
圖2 GOODRICH公司的機電作動器Fig.2 The EMA designed by GOODRICH

參數指標質量/kg24工作行程/mm±65最大行程/mm±90最大負載/kN33最大速度/(mm/s)350零位長度/mm540最大直徑/mm135
美國AMETEK公司研究的機電作動器結構如圖3所示。其采用電機、螺母、電位器同軸一體化結構,功率等級為5kW級,主要參數見表2。
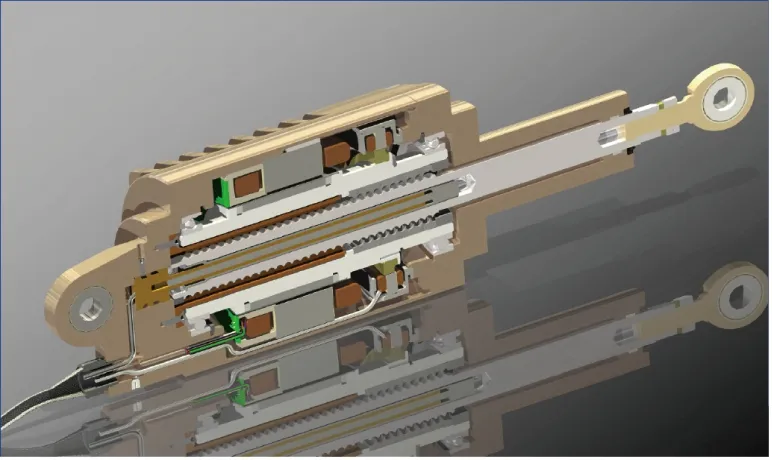
圖3 AMETEK公司研制的機電作動器Fig.3 The EMA designed by AMETEK
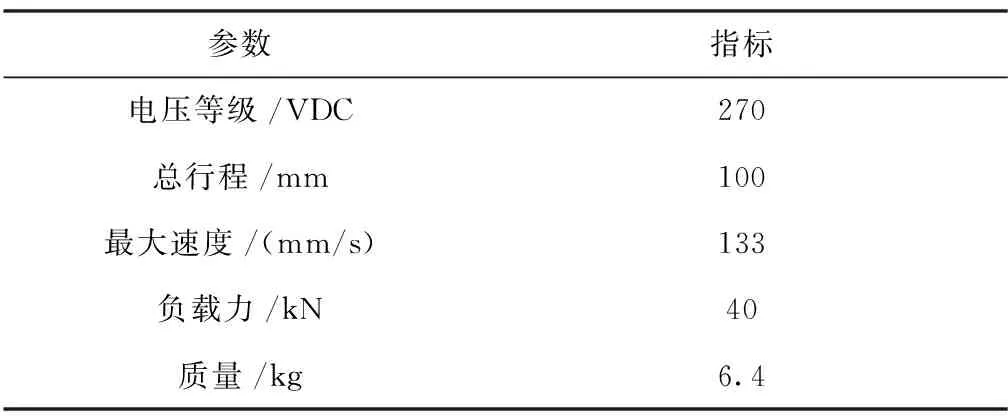
參數指標電壓等級/VDC270總行程/mm100最大速度/(mm/s)133負載力/kN40質量/kg6.4
漢勝公司設計生產的余度機電作動器產品如圖4所示。產品電能到機械能的轉化效率大于81%[4]。
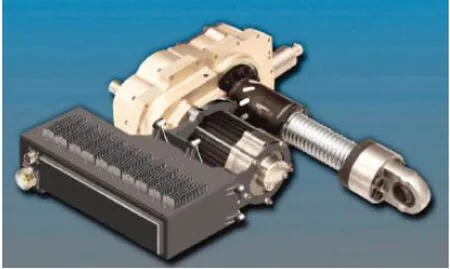
圖4 漢勝公司研制的產品Fig.4 The EMA designed by Hamilton Sundstrand
歐空局的“織女星”運載火箭(Vettore Europeo Generazione Avanzata,VEGA)四級發動機均采用電動伺服機構[5]。四級電動伺服機構的主要性能參數見表3。其中一級機電作動器產品如圖5所示,二級機電作動器產品如圖6所示。

表3 織女星火箭四級伺服機構主要指標

圖5 織女星火箭一級機電作動器Fig.5 EMA of the first Stage Servo Mechanism of the VEGA

圖6 織女星火箭二級機電作動器Fig.6 The second stage EMA of the VEGA
Moog公司為X-43A的機翼配套研制的機電作動器產品如圖7所示[7],產品主要參數見表4。

圖7 X-43A機翼用機電作動器產品Fig.7 The EMA applied on the X-43A plane
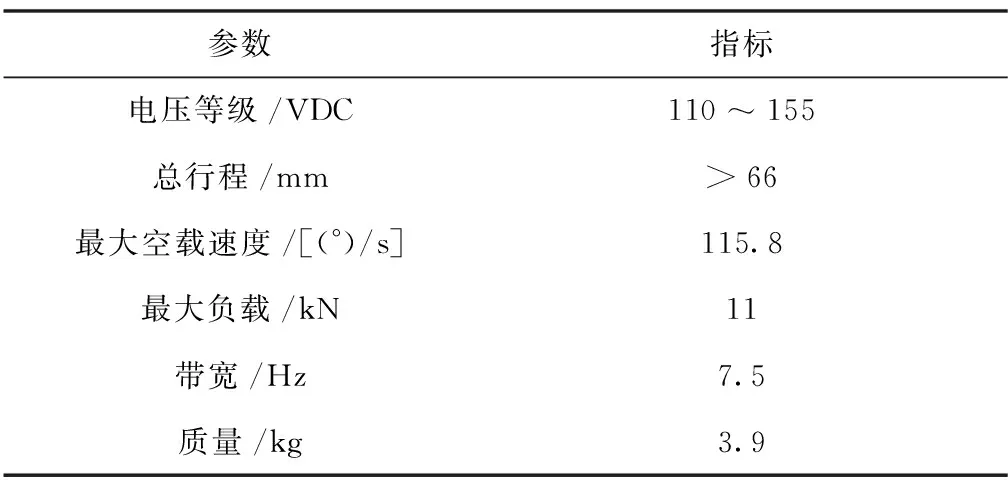
參數指標電壓等級/VDC110~155總行程/mm>66最大空載速度/[(°)/s]115.8最大負載/kN11帶寬/Hz7.5質量/kg3.9
Moog公司設計生產的余度機電作動器產品及工作原理圖如圖8所示[9]。


圖8 Moog公司設計的余度產品及原理圖Fig.8 The photo and structure of the EMA by Moog
劉易斯研究中心多年來進行以電動伺服機構代替液壓伺服機構用于推力矢量控制的研究,并成功地為阿特拉斯運載火箭研制了功率等級分別為52.2kW、29.6kW和18.6kW的一、二、三級推力矢量電動伺服系統。
通過上述敘述可知,在國外中大功率電動伺服機構已發展了很長的時間,技術成熟,產品已向系列化方向發展。
2 國內中大功率航天電動伺服機構的研發情況
在國內,小功率電動伺服機構已廣泛應用于各類導彈、無人機和直升機等型號中。研制單位有專業研究所和高校。
隨著需求牽引,原來從事中大功率液壓伺服機構研制的專業研究所轉向研發中大功率電動伺服機構。經過多年努力,中大功率電動伺服機構已經獲得工程應用并成為標配產品,逐步取代傳統液壓伺服機構。小功率電動伺服機構研制單位也逐步進入中大功率電動伺服機構市場。
作者所在單位研制的某型舵面控制用旋轉輸出式電動伺服機構,采用輸出軸直接與舵軸相連結構,通過控制機電作動器的轉角實現直接控制舵偏角。產品功率4kW,帶寬大于15Hz。同時,也研制了直線輸出方式的機電作動器,通過搖臂與舵面的舵軸相連,產品帶寬大于20Hz。面向發動機推力矢量控制需求研制的電動伺服機構,20kW級產品已應用于實際工程,更大功率產品正在研發。
目前,國內高可靠性、高安全性多余度電動伺服機構已進入工程研制階段。多余度電動伺服機構的研制為電動伺服機構進入運載火箭、先進飛行器等高可靠性產品的應用提供了技術基礎。
當前,在功率等級、功率質量比和集成一體化設計方面,國內與國外產品還存在較大的差距;在電磁兼容性方面,國內單位還需開展較多研究工作,特別是隨著功率等級的提高,此問題將會影響到系統的可靠工作;在永磁同步電機及旋轉變壓器等基礎類機電產品上,國內外產品的相對差距不大。隨著國內行業需求的牽引以及國家的大力推廣,國內外產品的差距正在逐步縮小。
3 結論
本文對中大功率航天電動伺服機構的研制和應用情況進行了介紹和分析,中大功率電動伺服機構在國外的運用已經成熟。隨著國內研制單位的大力推進以及用戶使用需求的強烈牽引,中大功率電動伺服機構在航天上的應用已初具規模。在后續新型號產品研制中,中大功率電動伺服機構已出現全面取代電液伺服機構的趨勢。隨著余度電動伺服機構的研制,在未來幾年,高可靠性多余度電動伺服機構將逐步運用到運載火箭以及其他具有高安全性要求的先進飛行器中。
在輕質小型化、網絡化、智能化等終極目標的需求牽引下,隨著新材料、新技術的發展,電動伺服機構在高度集成一體化、智能化、高可靠性等方面還有極大的發展空間。
[1] Jensen S C, Jenney G D, Dawson D. Flight test experience with an electromechanical actuator on the F-18 Systems Research Aircraft[C]// Digital Avionics Systems Conference, 2000. Proceedings. DASC.the 19thVolume:1.
[2] Navarro R. Performance of an Electro-Hydrostatic actuator on the F-18 systems research aircraft[R]. NASN TM-97-206224, October 1997.
[3] Gerada C, Bradley K J.Integrated PM machine design for an aircraft EMA[J]. IEEE Transactions on Industrial Electronics, 2008, 55(9):3300-3303.
[4] Torabzadeh-Tari M. Analysis ofelectro-mechanical actuator systems in more electric aircraft applications[J]. School of Electrical Engineering, 2005.
[5] Vanthuyne T. An electrical thrust vector control system for the Vega launcher[C]//Proceedings of 13thEuropean Space Mechanisms and Tribology Symposium-ESMATS 2009, Vienna Austria 23-25 September 2009.
[6] Dée G, Vanthuyne T, Alexandre P. An electrical thrust vector control system with dynamic force feedback[C]//International Conference on Recent Advances in Aerospace Actuation Systems and Components,June 13-15 2007, Toulouse, France.
[7] Lin Y, Baumann E, Bose D M, et al. Tests and techniques for characterizing and modeling X-43A electromechanical actuators[J]. 2008.
[8] Bates L B, Young D T. Developmentaltesting of electric thrust vector control systems for manned launch vehicle applications[J]. Proceedings of 41stAerospace Mechanisms Symposium ,Jet Propulsion Laboratory, May 16-18, 2012.
[9] Derrien J C, Sécurité S D. ElectroMechanical Actuator (EMA) advanced technologies for flight controls[C]//28thInternational congress of the aeronautical sciences. 2012.
[10] Garrison M, Davis M, Steffan S. Human-Rated Upper Stage Thrust Vector Control System Architecture Selection.43rdAIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit 8-11 July 2007, Cincinnauti, OH.
[11] 曾廣商,趙守軍,張曉莎. 我國載人運載火箭伺服機構技術發展分析[J]. 載人航天,2013,19(4):3-10.
[12] 郭宏,刑偉.機電作動系統發展[J].航空學報,2007,28(3):620-627.
[13] 任曉軍,唐苗,張新華,謝勁松.新型一體化直接驅動電動伺服機構技術發展現狀[J].戰術導彈控制技術,2010,27(2):31-39.
[14] 沙南生,李軍.功率電傳機載一體化電作動系統的研究[J].北京航空航天大學學報,2004,30(9):909-912.
[15] 汪軍林,解付強,劉玉潔.導彈電動舵機的研究現狀及發展趨勢[J].飛航導彈,2008(3):42-46.
[16] Bahm C, Baumann E, Martin J, et al. The X-43A Hyper-X Mach 7 flight 2 guidance, navigation, and control overview and flight test results[J]. AIAA paper, 2005-3275.
[17] Lin Y, Baumann E, Bose D M, et al. Tests and techniques for characterizing and modeling X-43A electromechanical actuators[J]. NASA/TM 2008-214637.
[18] Glaessgen E H, Dawicke D S, Johnston W M, et al. X-43Arudder spindle fatigue life estimate and testing[J]. NASA/TM 2005-213525.
[19] Todeschi M. Airbus-EMAs for flight actuation systems-perspectives[C]//International conference on recent advances in aerospace actuation systems and components. 2010:1-8.
[20] The X-38 V-201 flap actuator mechanism[C]// Proceedings of the 37thAerospace Mechanisms Symposium. Johnson Space Center, May 19-21,2004.
[21] Schinstock D E, Scott D A. Controller design for EMA in TVC incorporating force feedback, NASA[R]. MSFC Technical Report, University of Alabam, Mechanical Engineering Department, 1998.
A Review of the Current Development of High-Power Aerospace EMA
GUO Hong-gen,WANG Zhi-guo
(Servo technology institute of China Aerospace science & Industry Corp,Nanjing 210006,China)
With the rapid development of the new material and technology, the Electromechanical Actuator(EMA) has been successfully applied in the design of fly-by-wire aircraft, advanced space vehicle and thrust vector control systems.This paper introduces researches and applications of the High-power EMA in the world.According to the study, the EMA technology has been applied widely in foreign countries, and began to contribute to thrust vector control of Aerospace in China.We can predict that the EMA will take the place of Hydraulic Servo Mechanism in the future.
Attitude control;Electric servo mechanism;Aerospace;The condition of the application
10.19306/j.cnki.2095-8110.2016.03.001
2016-02-15;
2016-04-02。
郭洪根(1970-),男,研究員,主要從事伺服機構設計的研究工作。
TM32
A
2095-8110(2016)03-0001-05
猜你喜歡
現代裝飾(2022年4期)2022-08-31 01:39:32
現代裝飾(2022年3期)2022-07-05 05:55:06
物流技術與應用(2022年5期)2022-06-17 06:01:38
快樂語文(2021年36期)2022-01-18 05:48:46
金橋(2021年4期)2021-05-21 08:19:22
中國化妝品(2018年6期)2018-07-09 03:12:40
中國化妝品(2018年6期)2018-07-09 03:12:32
Coco薇(2015年1期)2015-08-13 02:23:50
汽車維修與保養(2015年6期)2015-04-17 03:31:50
玩具(2009年10期)2009-11-04 02:33:14
