地空導彈行進間穩定發射平臺技術研究
2016-03-16 05:37:21馬志剛尹康軍
導航定位與授時 2016年3期
馬志剛,羅 剛,尹康軍
(中國人民解放軍駐三六五五廠軍事代表室,貴州 遵義 563000)
地空導彈行進間穩定發射平臺技術研究
馬志剛,羅 剛,尹康軍
(中國人民解放軍駐三六五五廠軍事代表室,貴州 遵義 563000)
通過對地空導彈行進間穩定發射平臺進行技術研究,重點解決行進間發射平臺的姿態測量精度和動態水平穩定控制等技術難題,為行進間發射導彈提供穩定的發射平臺。
地空導彈;發射平臺
0 引言
科技的迅猛發展使防空作戰環境更為復雜,既要求武器系統有快速反應能力,又要求作戰方法由靜止戰向機動靈活的運動戰轉變。美軍《聯合作戰設想》提出“武器系統既能在停止時使用,也能在運動中使用,持續機動的火力作戰效能最大”,這反映了美軍作戰原則的新變化。高技術局部戰爭節奏快、強度高、密度大,導彈戰成為作戰主要方式之一,偵察技術的發展和打擊精度的提高,要求導彈武器系統具備快速準備、快速發射和較強生存保障能力。為適應這一要求,具有大功率自適應能力的地空導彈行進間穩定發射平臺應運而生。
本文通過對地空導彈行進間穩定發射平臺進行技術研究,重點解決行進間穩定發射平臺的姿態測量精度和動態水平穩定控制等技術難題,為行進間發射導彈提供穩定的發射平臺。發射平臺能在行駛狀態下進行自適應控制并保持導彈發射時的高精度水平穩定,在方位上具有快速回轉功能,實現行進中導彈發射的快速瞄準,從而較好地解決行進中發射導彈的難題,為發射車實施“即停即射”或行進中發射導彈創造了良好的條件,使地空導彈武器系統具有反應快、機動性強、自動轉移火力、邊走邊打的能力。
1 組成及工作原理
1.1 組成
地空導彈行進間穩定發射平臺主要由捷聯慣性測量組合(IMU)、控制計算機、伺服控制器、伺服電機、傳動機構、回轉裝置及穩定平臺等組成。系統組成框圖如圖1所示。
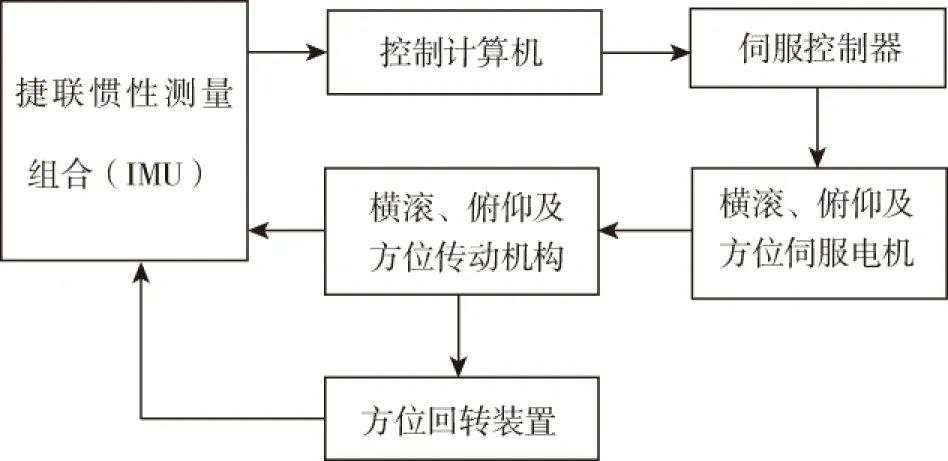
圖1 系統組成框圖Fig.1 System composition block diagram
1.2 工作原理

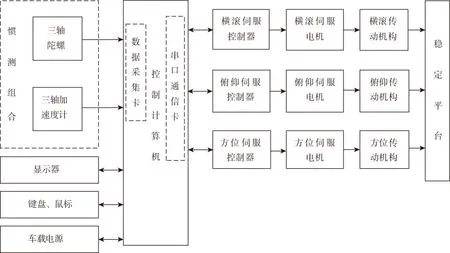
圖2 系統原理框圖Fig.2 System principle block diagram
2 關鍵技術研究
發射平臺橫滾角、俯仰角和方位角的角度測量,若在靜態情況下,可用傾角傳感器;但在行駛中傾角傳感器由于受到加速度等各種干擾,傾角傳感器的輸出值將嚴重失真,不能真實地反應發射平臺的姿態角,即橫滾角、俯仰角和方位角。發射平臺采用捷聯慣性測量技術構建“數學平臺”,解算行進中發射平臺的姿態角,采用多種誤差修正算法,消除測量誤差。同時,應用智能伺服控制技術[2],采用廣義預測控制算法,實現發射平臺的智能預測自適應控制,根據所測得的平臺姿態角,控制發射平臺的橫滾角、俯仰角和方位角的伺服系統,使平臺在行進中始終保持一定的水平精度,并根據控制計算機的輸入信息進行方位快速同步跟蹤瞄準。
2.1 “數學平臺”的構建及誤差修正
將慣測組合IMU(陀螺儀和加速度計)直接固聯在平臺上。慣測組合測得沿敏感軸相對于慣性空間的角速率和加速度分量,陀螺儀和加速度計輸出的信息經誤差補償,分別送入姿態矩陣計算和由載體坐標系至平臺坐標系的方向余弦矩陣的計算,利用姿態矩陣的元素,提取姿態和方位信息。姿態矩陣計算、加速度信息的坐標變換、姿態和方位的計算構成“數學平臺”。由于捷聯慣導系統不存在平臺慣導中的施矩量受物理條件限制的問題,因此捷聯慣導系統的測量坐標系取為地理坐標系。計算框圖如圖3所示。
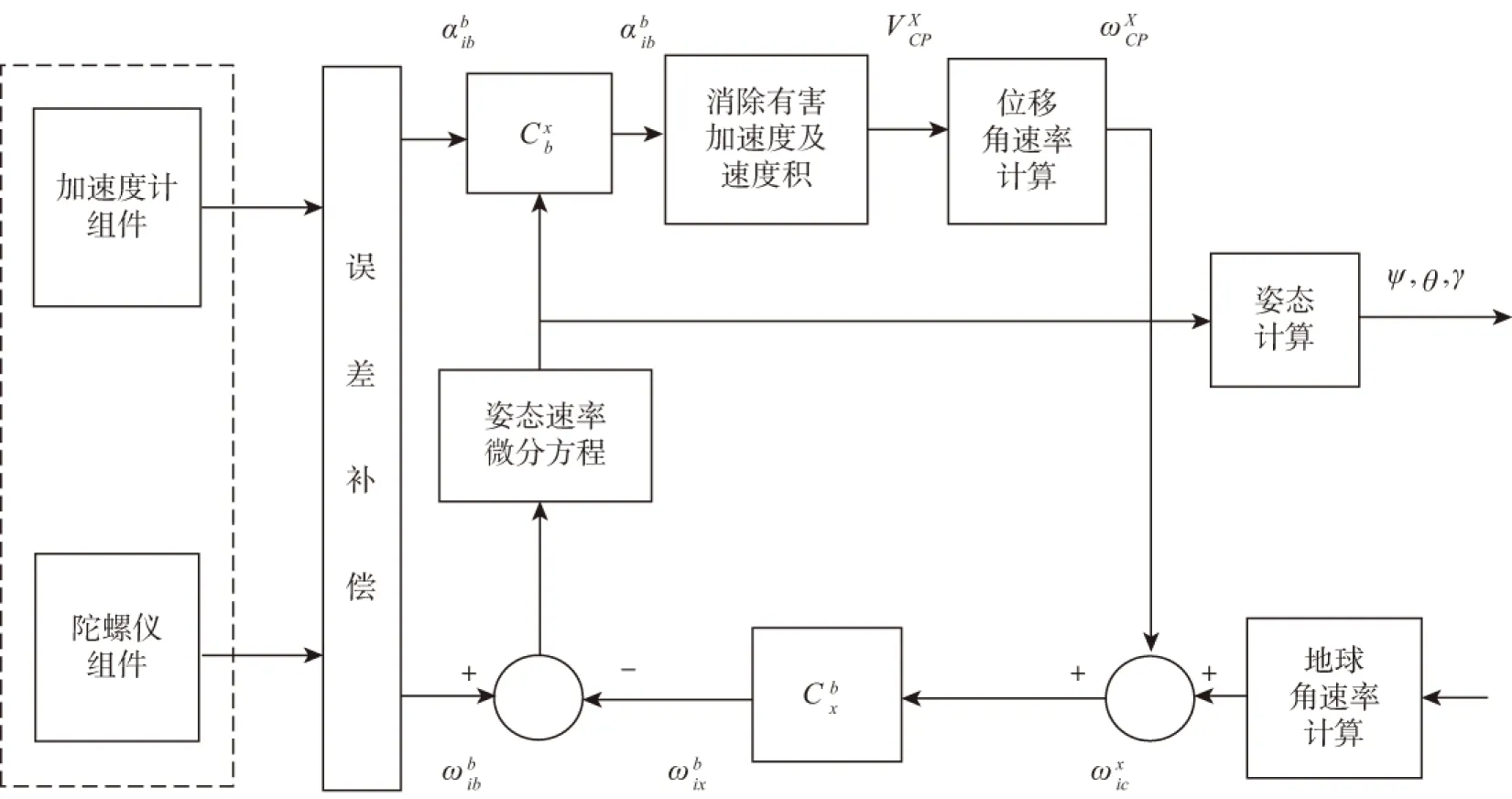
圖3 測量計算框圖Fig.3 Measuring calculation diagram
為了消除測量誤差,采用加速度計誤差補償、陀螺誤差補償、車輛測速儀修正、零速停車修正和粗精對準等多種技術實現系統誤差補償[3],確保發射平臺姿態測量精度。
2.2 伺服控制系統
控制系統主要由IMU、伺服控制器、伺服電動機、方位角傳感器、傳動機構等組成。伺服控制系統組成框圖如圖4所示。
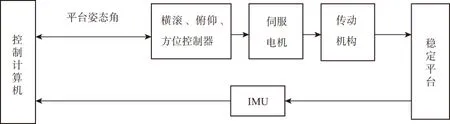
圖4 伺服控制系統組成框圖Fig.4 Servo control system composition block diagram
伺服控制器接收控制計算機的控制信息(控制計算機通過測量計算所得的平臺當前的橫滾角γ、俯仰角θ和方位角ψ),根據平臺姿態控制目標(如使橫滾角γ、俯仰角θ角度值始終趨于零,而方位角ψ與目標同步跟蹤)計算系統失調角ek,再進行校正環節的運算得到當前控制值uk;由當前控制值uk轉換為PWM脈寬占空比,從而產生脈寬PWMk控制信號;同時,采集電動機轉子位置信息,并結合當前控制值uk的控制方向計算出控制IGBT信息,實現控制脈寬PWMk對6個IGBT的有效控制,從而最終實現系統的伺服控制功能。
2.3 預測控制算法模型建立
通常預測控制算法主要有基于非參數模型的模型算法控制(MAC)、動態矩陣控制(DMC)和基于參數模型的廣義預測控制(GPC)、廣義預測極點配置控制(GPP)等,其中模型算法控制采用對象的脈沖響應模型,動態矩陣控制采用對象的階躍響應模型,這兩種模型具有易于獲得的優點;廣義預測控制和廣義預測極點配置控制是預測控制思想與自適應控制的結合,采用CARIMA模型,具有參數數目少并能夠在線估計的優點,而廣義預測極點配置控制進一步采用極點配置技術,提高了預測控制系統的閉環穩定性和魯棒性。因此本文采用廣義預測控制算法,實現發射平臺的智能預測自適應控制[4]。
2.3.1 廣義預測控制算法預測模型
預測模型具有預測的功能,即能夠根據系統的歷史數據和未來的輸入,預測系統未來輸出值。采用CARIMA(受控自回歸積分滑動平均模型)作為預測模型。模型表達式為
A(z-1)y(k)=B(z-1)u(k-1)+C(z-1)ξ(k)/Δ
(1)
式中:A(z-1)、B(z-1)、C(z-1)分別為n、m和n階的z-1的多項式;Δ——Δ=1-z-1;y(k)——輸出;u(k)——輸入;ξ(k)——零均值白噪聲。
2.3.2 滾動優化
(1)目標函數
為增強系統的魯棒性,在目標函數中考慮現在時刻的控制u(k)對系統未來時刻的影響,其目標函數為
(2)
式中:n——預測最大長度;m——控制長度,m≤n;λ(j)——控制加權系數,大于零,這里取λ(j)=λ(常數)。
對設定值進行柔化處理,得到參考軌跡
w(k+j)=αjy(k)+(1-αj)yr(j=1,2…,n)
式中:yr、y(k)、w(k+j)分別為設定值、輸出值和參考軌跡;α——柔化系數,0<α<1。
其預測控制問題,就是通過優化求得Δu(k),Δu(k),…,Δu(k+m-1),使得目標函數J達到最小值。
(2)預測輸出
根據預測理論,進行j步預測輸出,可引入丟番圖方程
1=Ej(z-1)A(z-1)+z-jFj(z-1)
(3)
式中:Ej(z-1)=ej0+ej1z-1+…ej,j-1z-j+1,ej0=1;Fj(z-1)=fj0+fj1z-1+…fjnz-n。
得到最優輸出預測值為

(4)
(3)最優控制
設參考軌跡為
W=[w(k+1),w(k+2),…,w(k+n)]T
則目標函數可表示為
J=(Y-W)T(Y-W)+λΔUTΔU
(5)
將式(4)代入式(5)
ΔU=(GTG+λI)-1GT(W-f)
(6)
在實際控制時,僅僅將第一個控制分量加入系統中,有
u(k)=u(k-1)+gT(W-f)
式中,該gT為(GTG+λI)-1GT的第一行。
廣義預測控制算法與通常的最優控制不同,采用滾動優化,優化目標是隨時間推移的,在每個時刻都提出一個立足于該時刻的局部優化目標,而不是采用不變的全局優化目標。因此,優化過程不是一次離線完成的,而是在線反復進行的,這就是滾動優化目標的局部性,使得在理想條件下,只能取得全局的次優。但是,當模型失配或控制對象時變、非線性及干擾影響時,廣義預測控制算法能夠解決這種不確定性,及時進行補償,減小偏差,保持實際的最優。
2.3.3 隱式廣義預測自校正控制算法
(1)并列預測器
GPC的最優控制律如下
ΔU=(GTG+λI)-1GT(W-f)
式中,控制量加權因子λ和柔化后的設定值向量W已知,因此要求取ΔU,必須已知矩陣G和開環預測向量f。隱式自校正方法就是利用輸入和輸出數據,根據預測方程直接辨識G和f。
根據式(4)可得到n個并列預測器為
(7)
式中,矩陣G中所有元素g0、g1、…、gn-1都在最后一個方程中出現,因此僅對式(7)的最后一個方程進行辨識,即可求得矩陣G。
(2)矩陣G的求取
式(7)的最后一個方程為
y(k+n)=gn-1Δu(k)+…+g0Δu(k+n-1)+
f(k+n)+Enξ(k+n)
(8)
令
X(k)= [Δu(k),Δu(k+1),…,
Δu(k+n-1),1]
θ(k)=[gn-1,gn-2,…,g0,f(k+n)]T
則式(8)可寫為
y(k+n)=X(k)θ(k)+Enξ(k+n)
(9)

(10)
θ(k)采用以下遞推最小二乘法公式進行估計:
(11)
式中,λ1為遺忘因子,λ1∈(0,1)。
由此得到k時刻n步估計值:


Δu(k+n-1),1]。
(3)預測向量f的求取
根據GPC與DMC控制規律的等價性,GPC中的f向量與DMC中的Y0向量相等,DMC的誤差校正表達式為:
(12)
由式(12)得到下一時刻的Y0向量為
(13)
式中:p——模型時域長度(p≥n);h2,h3,…,hp——誤差校正系數,取h2,h3,…,hp為1;
e(k+1)——預測誤差,e(k+1)=y(k+1)-y(k+1/k)。
因f與Y0等價,由式(13)可得到下一時刻的預測向量f
(14)
由此就求得了f向量。
由式(11)、式(14)計算得到G和f后,就可采用式(5)計算控制量。每一次計算,都可得到k時刻及以后n步的n個控制序列。為了及時地利用反饋信息決定控制量,每次計算完畢后,僅將控制序列中的第一個控制量作用于系統。
2.4 多自由度大承載穩定平臺結構
地空導彈行進間穩定發射平臺結構如圖5所示。圖5中,1是車體安裝面;2是固定支座;3是外環,用于實現平臺繞縱軸轉動;4是縱搖電機及減速器,用于實現平臺的俯仰控制;5是內環,用于實現平臺繞橫軸轉動;6是設備安裝平臺,根據使用要求用于安裝所需設備;7是橫搖電機及減速器,用于實現發射平臺的橫滾控制;8是慣測組合,用于測量運動載體的加速度和姿態角速率;9是方位回轉電機及減速器,用于實現發射平臺的方位轉動;10是鎖緊機構,用于車輛在行駛中平臺不需要調整時的鎖緊固定。
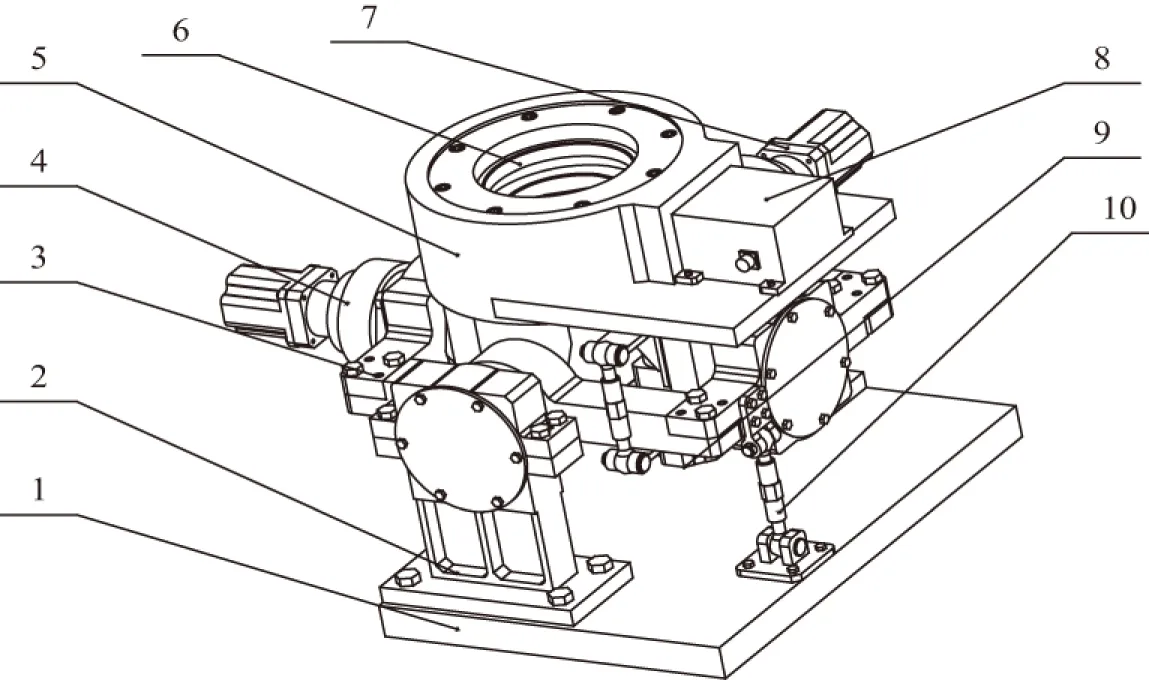
圖5 平臺機械結構圖Fig.5 Mechanical structure drawing of the launch platform
平臺能實現縱搖、橫搖和方位旋轉多個自由度運動。其工作原理是:縱搖運動過程是縱搖電機4帶動其減速器運轉,再帶動內環5圍繞其安裝于外環的轉軸轉動;橫搖運動過程是橫搖電機7帶動其減速器運轉,再帶動安裝于固定支座2的轉軸轉動;方位運動過程是方位電機9帶動其減速器運轉,再帶動方位回轉齒圈轉動,從而帶動安裝設備的方位回轉運動。
2.5 軟件
軟件主要實現人機界面、導航計算及伺服控制[5]。
人機界面主要實現原始數據輸入、導航控制、平臺伺服控制。
導航計算主要實現實時采集各種傳感器的數據、初始對準計算、利用IMU進行導航計算、零速修正、記錄與保存數據。
伺服控制主要實現接收控制計算機的控制信息和控制計算機提供的平臺姿態信息,實現平臺橫滾角、俯仰角、方位角的伺服控制。
軟件采用模塊化設計。軟件開發平臺使用VisualC++ 6.0,數據庫使用Access數據庫,矩陣運算使用自編的C++矩陣運算類。
軟件分為以下幾個模塊:人機界面模塊、系統設置模塊、基本參數輸入模塊、數據存儲/讀取模塊、硬件通信模塊、矩陣運算模塊、IMU導航計算模塊、零速修正模塊、初始調平和自主尋北模塊及伺服控制模塊。軟件總體結構如圖6所示。
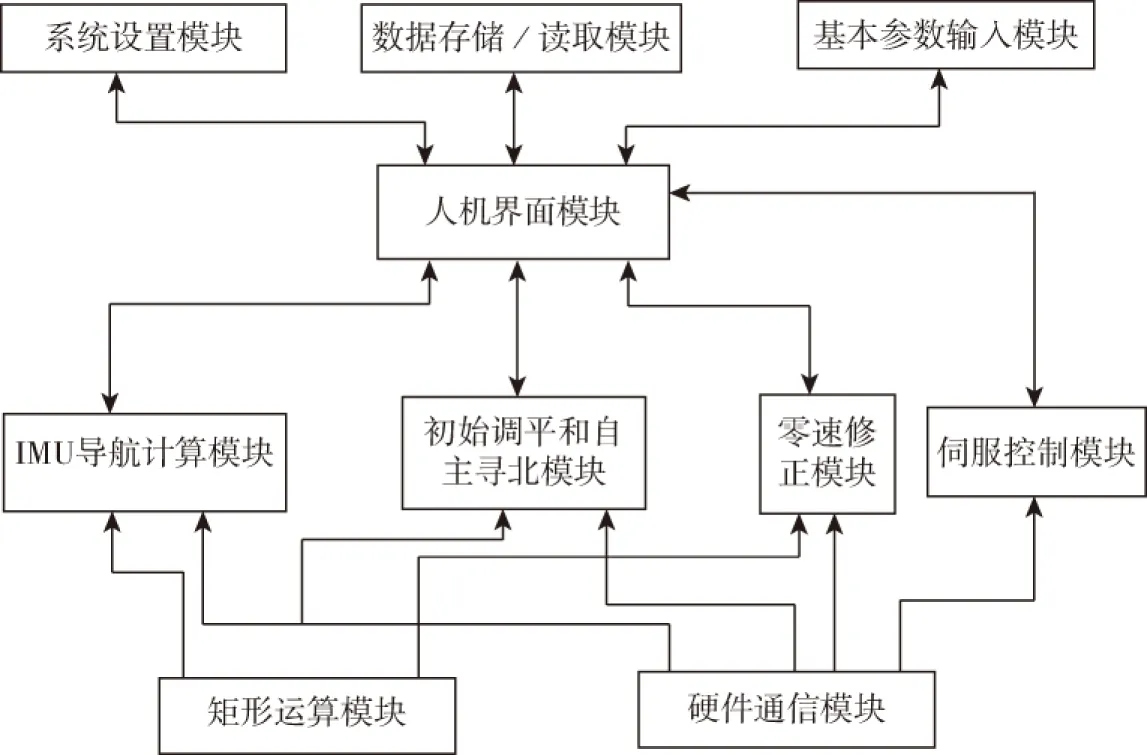
圖6 軟件總體結構圖Fig.6 The overall structure drawing of software
3 結束語
地空導彈行進間穩定發射平臺是行進間發射技術的重要組成部分,適用于導彈發射車行進中發射導彈、雷達車行進中搜索目標等領域,在軍事領域中具有廣闊的應用前景。
[1] 胡壽松. 自動控制原理[M].北京:科學出版社,2013.
[2] 劉超, 高雙. 自動控制原理的MATLAB仿真與實踐[M].北京:機械工業出版社,2015.
[3] 謝剛. 全球導航衛星系統原理:GPS、格洛納斯和伽利略系統[M].北京:電子工業出版社,2013.
[4] 王生捷. 發射控制技術[M].北京:北理工大學出版社,2015.
[5] 胡振文. 車輛定位與導航[M].北京:中國鐵道出版社,2009.
Research on a Stabilized Launch Platform on Moving Vehicle for Ground-to-Air Missile Weapon
MA Zhi-gang, LUO Gang ,YIN Kang-jun
(Military Representative Office of the People’s Liberation Army in 3655 Factory,Zunyi 563000,China)
A stabilized launch platform of ground-the-air missile weapon on the moving vehicle is studied, some technology problems, such as attitude measuring precision and dynamic level stability control of launch platform on the moving vehicle are mainly analyzed.Through the study, the stability of launch platform is improved.
Ground-to-air missile weapon;Launch platform
10.19306/j.cnki.2095-8110.2016.03.009
2015-10-08;
2016-02-18。
馬志剛(1972-),男,工程師,主要從事地空導彈發射控制技術方面的研究。
TJ761.1
A
2095-8110(2016)03-0051-07
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
