智能移動機器人導航控制技術綜述
2016-03-16 06:58:42李成進
導航定位與授時 2016年5期
李成進,王 芳
(1.海軍駐昆明地區軍事代表辦事處,昆明 650000;2.航天科工智能機器人有限責任公司,北京 100074)
智能移動機器人導航控制技術綜述
李成進1,王 芳2
(1.海軍駐昆明地區軍事代表辦事處,昆明 650000;2.航天科工智能機器人有限責任公司,北京 100074)
智能移動機器人在制造業、服務業、軍事、星際探測等領域獲得了廣泛的應用,導航是智能移動機器人實現自主控制需要解決的重要問題。對不同領域智能移動機器人導航技術發展現狀進行了調研。針對環境感知與建模、定位和路徑規劃等機器人導航控制關鍵技術,深入分析了其實現方法。在此基礎上歸納出智能移動機器人導航控制未來的發展趨勢。
智能移動機器人;導航;環境感知;定位;路徑規劃
0 引言
20世紀90年代,以計算機技術、微電子技術、信息技術、網絡技術等為標志的現代科技革命進入快速發展階段,成為促進機器人技術發展的內在推動力,機器人技術得到了飛速發展。智能移動機器人是能夠依靠自身攜帶的傳感器感知理解外界環境,根據任務需要實時決策,進行閉環控制,以自主或半自主方式進行作業,在已知或未知環境中具有一定自我學習和適應能力的新型機器人。目前,智能移動機器人在制造業、服務業、軍事、星際探測等領域獲得了廣泛的應用,并將對未來科技的發展以及人類生活方式產生深遠的影響。導航是智能移動機器人實現自主控制需要解決的重要問題,是指移動機器人通過傳感器和學習,感知環境和本身狀態,實現有障礙環境中指向目標自主運動的過程。
1 智能移動機器人發展現狀
以美國、德國、日本等為代表的機器人技術發達國家對機器人自主導航技術開展了較為深入的研究,目前已取得了一些成果,具有自主導航功能的機器人在工業、服務、外星探測、軍事等領域獲得了不同程度的應用。
移動機器人最成功的應用是在機場、碼頭、工廠中實現物流自動化的自動導引車(Automated Guided Vehicle,AGV),如圖1(a)所示。AGV一般配備車載計算機、通信裝置和物料裝卸裝置,隨著科技的發展,整機復雜性和自動化程度都大大提高。常用的導航方式有視覺導引、磁導引、電磁導引和慣性導引等[1-2]。
在電力、煤礦等領域可采用智能移動機器人代替人工完成危險作業或枯燥的重復作業。例如,卡內基梅隆大學機器人研究中心所開發的Groundhog全自主礦井探測機器人可用于探測井下環境,精確繪制井下立體地圖[3],如圖1(b)所示。在我國變電站自動巡檢機器人已獲得了初步應用。目前變電站巡檢機器人以磁道導航為主,典型產品如1(c)所示山東電科院研制的巡檢機器人。
外星探索是自主移動機器人的一個重要應用方向。從20世紀60年代開始, NASA就開始著手研制火星探索用的機器人,以便在火星上軟著陸后進行移動并收集火星表面生態數據。自1997年機器人索杰納的火星之旅取得成功后, “勇氣”號、“機遇”號、 “好奇”號等機器人(如圖1(d)所示)相繼開始了火星探測工作,具備了一定的自主導航功能,并發回大量有價值的信息。
近10年以來,在美國陸軍、DARPA的一系列無人作戰裝備項目(如FCS、UPI等)的資助下,一些先進無人作戰裝備目前已試驗性地應用于美軍的反恐戰爭中。MULE(騾馬)是由洛克希德·馬丁公司研制的多功能通用/后勤無人車,如圖1(e)所示。MULE系列多用途機器人戰車安裝了自動導航系統(Autonomous Navigation System,ANS)等先進的車載電子設備。MULE具備自主導航能力,但在穿越嚴酷地形,或當地形變化影響了規劃路點時,仍由人來控制[4]。
無人駕駛汽車作為一種特殊的輪式機器人,是計算機科學、模式識別和智能控制技術高度發展的產物[5]。無人車技術吸引了全球各大汽車廠商、互聯網公司的關注。2005年,基于斯坦福大學無人駕駛技術,Google公司開始涉足無人車研發并不斷完善,已在美國加州、內華達州等多州獲得上路許可。目前Google無人車(如圖1(f)所示)成功行駛70萬英里,在此期間由電腦控制的汽車行駛平穩,無意外事故發生,基本具備商用推廣條件。

(a)AGV
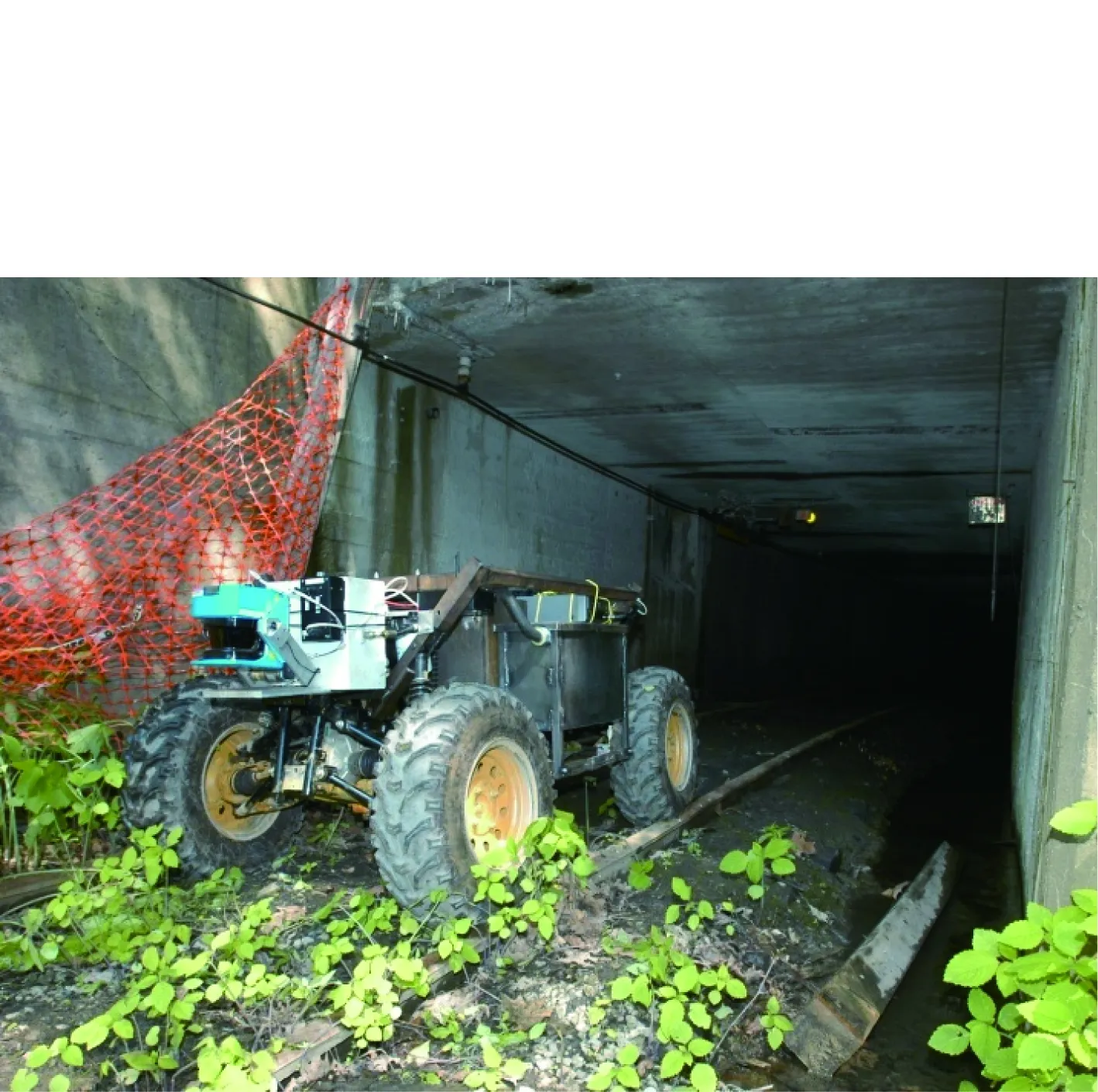
(b)Groundhog

(c)變電站巡檢機器人

(d)“好奇”號火星車

(e)MULE

(f)Google無人車
2 智能移動機器人導航關鍵技術分析
導航是智能移動機器人實現自主控制需要解決的重要問題。智能移動機器人導航可分解為“我在哪里?” “目標在哪里?”和“怎樣到達那里?”三個問題。前兩個問題通過確定機器人在工作環境中的位置及相對目標的位置偏差來解決。該工作環境在機器人內部的表示稱為環境模型或地圖。機器人確定環境模型的過程稱為環境建模。基于環境模型以及機器人的位置,第三個問題路徑規劃才能夠解決。環境建模、定位和路徑規劃被稱為機器人導航的三要素[5]。
2.1 環境感知與建模
為了實現智能移動機器人自主導航,需要根據多種傳感器信息識別多種環境信息:如道路邊界、地形特征、障礙、引導者等,在無人駕駛汽車導航中還需要識別交通標志、典型路口等信息。機器人通過環境感知確定前進方向中的可達區域和不可達區域,確定在環境中的相對位置,以及對動態障礙物運動進行預判,從而為局部路徑規劃提供依據[6]。
可用于機器人環境感知的傳感器包括以下幾類。
1)視覺傳感器:具有信號探測范圍寬、目標信息完整、獲得環境信息的速度快等優勢,在機器人導航中獲得了廣泛應用。可見光成像方式可用于白天氣象條件良好情況下,識別環境中的道路分界、地形特征、障礙物等;紅外成像方式可用于惡劣氣象條件、夜間光照較差等環境,以及預警環境中的行人、車輛、動物等熱目標。由于視覺信息本身不攜帶距離信息,為了從圖像中獲得距離等度量信息,立體視覺是通常采用的方案。
2)激光雷達:具有探測距離遠(幾十米,甚至上百米)、測量精度高,可進行線掃描和面掃描等特點,廣泛應用于機器人防撞和環境建模。線掃描激光雷達只能得到環境的二維模型,面掃描激光雷達可以得到環境的三維模型。
3)毫米波雷達:工作在毫米波段,工作頻率通常在30~300GHz。毫米波雷達掃描可用于防撞。相比于視覺傳感器、激光雷達,毫米波穿透霧、煙、灰塵的能力強,具有全天候、全天時的特點。
4)紅外測距傳感器:波長大約在幾百nm范圍內。不受電磁波的干擾,非噪聲源,可實現非接觸性快速測量,價格低廉。物體顏色、方向、周圍光線會導致測量誤差,測距范圍較近,一般在3m左右。
5)超聲波測距傳感器:頻率在2000Hz以上的機械振動波,傳播具有一定的方向性,價格較低。比紅外傳感器精確,但易發生鏡面反射導致測距出錯,波束角較大,反射目標點的準確方位難以確定。
上述各類傳感器在移動機器人環境感知和建模中發揮著不同的作用。其中超聲波、紅外測距傳感器由于測量精度有限,一般只用于障礙物檢測,而不用于環境特征識別與建模。毫米波雷達主要用于無人駕駛或輔助駕駛的防撞報警。視覺傳感器和激光雷達是移動機器人環境感知和建模的最常用傳感器,表1對兩類傳感器感知信息內容和常用感知算法進行了歸納總結[7-13]。

表1 各傳感器感知信息及方法
由于各類傳感器工作機理、作用范圍、適用環境不同,感知信息的種類和能力也不盡相同。通常一個機器人需配備多種傳感器,采用多信息融合技術綜合利用多傳感器信息,消除冗余,并加以互補,從而提高對環境變化的適應性,使機器人能夠獲取更完備的環境信息。
根據環境模型的形式可以將環境建模分為基于概率格、幾何信息、拓撲信息、三維環境信息的環境建模。根據環境模型的坐標系,可以將其分為局部建模和全局環境建模。在環境建模技術方面,依次出現了基于傳感器的單元分解建模技術、幾何建模技術、拓撲建模技術,自1990年以來,概率技術在環境建模領域逐漸占據主導地位,包括擴展Kalman濾波(EKF)、極大似然估計法(MLE)。在復雜未知環境中,由于先驗知識的匱乏和環境的不確定性,使得并發環境建模與定位方法(SLAM)成為研究熱點,但推廣到工程應用,還需要在實時性、魯棒性和準確性三個方面取得突破[14]。
2.2 定位
移動機器人必須具有定位的能力,其目的就是確定機器人在運行環境中相對于世界坐標系的位置及航向。目前機器人定位方法分為以下幾類[15-16]。
1)衛星定位:在室外無遮時,可以利用衛星定位系統對機器人定位。但是在城市、隧道、室內等環境下,因衛星信號遮擋無法應用。可采用雙天線衛星定位系統獲得航向,航向精度與基線長度有關。
2)慣性定位:通過對固聯在載體上的三軸加速度計、三軸陀螺儀進行積分,獲得載體實時、連續的位置、速度、姿態等信息,但慣性誤差經過積分之后都會產生無限的累積,因此純慣性導航不適合長時間的精確定位。
3)航位推算:通過車輪上安裝的光電編碼器對車輪轉動圈數進行記錄,來計算載體的位置和姿態。由于是一種增量式定位方法,定位誤差會隨時間累計。對于非輪式機器人或是機器人行駛在崎嶇路面輪子存在打滑的情況,可采用視覺方法獲得里程信息。
4)電子地圖匹配:利用圖像處理技術,將實時獲取的環境圖像與基準圖進行匹配,從而確定載體當前的位置,匹配的特征可以為設定的路標、特定的景象或是道路曲率。電子地圖匹配特別適用于對機器人系統長時間的定位誤差進行校準。
以上定位方式中,慣性導航以及基于里程計的航位推算為相對定位方式,可以獲得連續的位置、姿態信息,但存在累積誤差;衛星定位、電子地圖匹配等定位方式為絕對定位,可以獲得精確的位置信息,但難以獲得連續姿態信息。相對定位與絕對定位方式存在較強的互補性,通常采用將兩者結合的組合定位方法。通常以相對定位為主導航方式,以衛星、里程、地圖信息等為輔助手段,利用Kalman濾波等算法對各導航設備誤差進行估計,以減少組合后系統的導航誤差。
2.3 路徑規劃
路徑規劃則是導航研究的一個重要環節和課題。路徑規劃主要涉及的問題包括[17-18]:1)利用獲得的移動機器人環境信息建立較為合理的模型,再利用某種算法尋找一條從起始狀態到目標狀態的最優或次優的無碰撞路徑;2)能夠處理環境模型中的不確定因素和路徑跟蹤中出現的誤差,使外界對機器人的影響降到最小;3)利用已知信息來引導機器人動作,從而得到相對更優的行為策略。
根據機器人掌握環境信息的程度不同,可分為兩種類型:一個是基于環境先驗信息已知的全局路徑規劃;另一個是基于傳感器信息的局部路徑規劃,后者環境是未知或部分未知的,即障礙物的尺寸、形狀和位置等信息必須通過傳感器獲取。全局路徑規劃方法通常包括:自由空間法、可視圖法、柵格法、拓撲法等,各算法的原理及特點如表2所示。局部路徑規劃方法通常包括:人工勢能法、遺傳算法、模糊邏輯法、神經網絡法等,各算法的原理及特點如表3所示。

表2 全局路徑規劃方法分析

表3 局部路徑規劃方法分析
3 智能移動機器人導航技術發展趨勢
1)從已知環境、結構化環境導航向未知環境、非結構化環境導航發展
已知環境導航技術相對成熟,如工廠、碼頭AGV,變電站巡檢機器人等,已有成熟產品投入使用。結構化環境中,由于環境要素已知且規則,其環境建模、定位較為簡單,自主導航易于實現。在未知環境中或非結構化環境中,由于先驗知識缺乏或是環境要素難以辨識,而感知信息不完備或環境存在干擾,機器人環境建模和定位存在困難,自主導航難度較大。外星探測機器人、軍用機器人均涉及未知、非結構化環境導航,相關研究成為當前研究熱點。SLAM被認為是機器人實現自主導航的有效途徑。
2)新技術、新產品的出現為機器人導航提供了新的解決途徑
一些新技術、新產品可能源于其他領域,但為機器人導航控制提供了新的解決方法,值得關注。例如圍繞個人移動終端的室內定位技術方興未艾,基于Wi-Fi、藍牙、ZigBee、超寬帶的多種方案趨于成熟,并投入市場應用。將這些技術與機器人導航技術相結合,為機器人室內導航開辟了新思路。微軟的Kinect體感游戲機可進行圖像編碼并主動投射近紅外光譜,已成為機器人室內導航的新裝備,用以替代昂貴的激光雷達進行環境建模和定位。
4 結論
當機器人走出限定的范圍,走向更廣闊的空間時,導航成為制約機器人在更大范圍內推廣應用的瓶頸技術,也是智能移動機器人真正實現自主控制的關鍵技術。環境建模、定位與路徑規劃是智能移動機器人導航的基本問題,相關的理論研究自20世紀70~80年代以來已較為完備。隨著科技的進步,新技術、新產品的出現為機器人導航提供了更多解決方案,為自主移動機器人走向工程應用創造了條件。
[1] 徐驍,趙永康,廖超,等.一種基于RFID的AGV電磁導引新方式[J]. 物流技術,2011,30(1):138-141.
[2] 龍水軍,汪焰恩,魏生民,等.基于彩色軌跡引導的AGV視覺導航方案研究[J]. 工具技術,2014,48(1):74-77.
[3] Thrun S, Thayer S, Whittaker W, et al. Autonomous exploration and mapping of abandoned mines[J]. IEEE Robotics & Automation Magazine, 2004, 11(4):79-91.
[4] Silver D, Bagnell J A, Stentz A. Learning from demonstration for autonomous navigation in complex unstructured terrain[J]. The International Journal of Robotics Research, 2010,29(12): 1565-1592.
[5] Luettel T, Himmelsbach M, Wuensche H J. Autonomous ground vehicles-concepts and a path to the future[J]. Proceedings of the IEEE, 2012,100(5): 1831-1839.
[6] 于金霞,王璐,蔡自興.未知環境中移動機器人自定位技術[M]. 北京:電子工業出版社,2011.
[7] 王燕清,陳德運,石朝俠.基于單目視覺的非結構化道路檢測與跟蹤[J]. 哈爾濱工程大學學報, 2011, 32(3): 334-339.
[8] 史曉鵬,何為,韓力群.采用Hough變換的道路邊界檢測算法[J]. 智能系統學報, 2012, 7(1): 81-85.
[9] 楊象軍,項志宇,劉濟林.基于四線激光雷達的校園道路的檢測與跟蹤[J]. 傳感器與微系統, 2013, 32(9):134-138.
[10] Han J, Kim D, Lee M, et al. Enhanced road-boundary and obstacle detection using a downward-looking LIDAR sensor [J]. IEEE Transactions on Vehicular Technology, 2012, 61(3):971-985.
[11] Gim S,Meo I, Park Y, et al.Drivable road recognition by multilayered LiDAR and vision [J]. Intelligent Autonomous Systems, 2013(12):43-56.
[12] 谷明琴,蔡自興,何芬芬.形狀標記圖和Gabor小波的交通標志識別[J]. 智能系統學報,2011,6(6):526-530.
[13] 李新,禹翼.基于SIFT算法的交通標志識別[J]. 制造業自動化, 2012,34(5):10-12.
[14] 戈英民,劉丁.動態環境下基于路徑規劃的機器人同步定位與地圖構建[J]. 機器人,2010,32(1):83-90.
[15] 陶敏, 陳新, 孫振平. 移動機器人定位技術[J]. 火力與指揮控制, 2010, 35(7): 169-172.
[16] Cho S Y, Wan S C. Robust positioning technique in low-cost DR/GPS for land navigation [J]. IEEE Transactions on Instrumentation and Measurement, 2006, 55(4): 1132-1142.
[17] 蔡自興,賀漢根,陳虹, 等.未知環境中移動機器人導航控制理論與方法[M]. 北京:科學出版社,2009.
[18] 郭小勤. 未知環境下移動機器人遍歷路徑規劃[J]. 計算機工程與設計,2010, 31(1):172-174.
Review of Navigation Control Technology of Intelligent Mobile Robot
LI Cheng-jin1, WANG Fang2
(1.Navy Military Representative Office in Kunming Area, Kunming 650000, China;2.Aerospace Science & Industry Intelligent Robot Company Limited,Beijing 100074,China)
Intelligent mobile robot is widely used in the areas of manufacturing, service industry, military and interplanetary exploration. Navigation is one of the primary problems of autonomous control of intelligent mobile robot. The current status of the navigation technology of intelligent mobile robots in various areas was investigated. The approaches of crucial points of navigation control, which include environmental perception and mapping, localization and path planning, were deeply analyzed. Based on above all, the trends of navigation control of intelligent mobile robot is summarized.
Intelligent mobile robot; Navigation; Environmental perception; Localization; Path planning
10.19306/j.cnki.2095-8110.2016.05.005
2015-12-11;
2016-01-29。
李成進(1970-),男,高級工程師,主要從事慣性導航定位方面的研究。E-mail:hbhcmthjz@sina.com
TP242
A
2095-8110(2016)05-0022-05
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
制造技術與機床(2017年3期)2017-06-23 08:11:21
