空空導彈SINS飛行中對準技術
2016-03-16 06:17:56周本川段朝陽
導航定位與授時 2016年1期
關鍵詞:系統
周本川,魯 浩,段朝陽
(中國空空導彈研究院 航空制導武器航空科技重點實驗室,河南 洛陽471099)
空空導彈SINS飛行中對準技術
周本川,魯 浩,段朝陽
(中國空空導彈研究院 航空制導武器航空科技重點實驗室,河南 洛陽471099)
針對空空導彈捷聯慣導系統傳遞對準的精度和快速性之間的矛盾,設計一種利用彈載北斗衛星導航信息的捷聯慣導系統飛行中對準算法,詳細推導了慣性系下基于北斗衛星偽距/偽距率的飛行中對準模型,優化了飛行中對準的量測方程,對北斗衛星接收機的鐘差和鐘漂進行了降維處理。相應的數學仿真試驗結果表明,所提算法能夠在飛行過程中實現捷聯慣導系統的初始對準,在10s內對準精度優于6′,同時該算法通過在線標定慣性傳感器隨機啟動誤差,能夠提高捷聯慣導系統導航精度和導彈系統抗干擾能力。
飛行中對準;偽距/偽距率;在線標定
0 引言
空空導彈普遍裝備捷聯慣導系統用于導彈的中制導,初始姿態誤差嚴重影響中末制導交接班精度。初始對準問題是彈載捷聯慣導系統的關鍵技術之一,目前彈載捷聯慣導系統一般通過傳遞對準技術提高初始姿態精度。傳遞對準就是利用載機的火控信息,采用速度匹配、姿態匹配等方法,通過卡爾曼濾波估計并補償初始姿態誤差[1-3]。隱身、超聲速的飛行器已經出現在現代戰爭中,空空導彈的攻擊目標存在強烈的時敏性,客觀上要求空空導彈面對攻擊目標時能夠立即發射,從而實現空空導彈的零秒反應,最大限度地避免貽誤戰機,而傳遞對準技術存在對準時間和對準精度之間的矛盾,難以滿足空空導彈對武器系統快速性的要求。
目前,隨著我國自主研發的北斗衛星導航系統的逐步成熟,新型空空導彈已經裝備北斗衛星接收機,利用北斗衛星接收機提供的導航信息對彈載捷聯慣導系統進行飛行中對準[4-5]成為可能。這種情況下,載機只需要對空空導彈捷聯慣導系統進行簡單快速的初始化,捷聯慣導系統的對準過程在空空導彈飛行過程中進行,可以解決對準時間和對準精度之間的矛盾。同時,由于脫離了載機平臺,飛行中對準也能夠避免傳遞對準時載機振動、機翼變形等干擾的影響,與空空導彈傳遞對準互為備份,提高彈載捷聯慣導系統初始對準的可靠性。
本文以北斗衛星導航信息輔助下的彈載捷聯慣導系統飛行中對準算法為研究對象,設計慣性系下基于北斗衛星偽距/偽距率的飛行中對準模型,并通過數學仿真試驗驗證該算法的有效性。
1 飛行中對準模型建立
1.1 飛行中對準系統狀態方程
導航坐標系(n系)選擇發射慣性系,其原點位于導彈準備時刻載機下方的海平面上,導彈發射點處的北天東地理坐標系,該坐標系的坐標軸向保持慣性空間不變,彈體坐標系(b系)為常規的前上右坐標系。
慣性系下SINS的理想速度如式(1)所示
(1)
根據疊加性誤差模型,并忽略重力誤差的影響與高階小量,可以得到速度誤差方程如式(2)所示

(2)
式中,δVn為慣性系下速度誤差,φn為失準角,δfb為載體系下加速度計輸出誤差。
慣性系下SINS的位置誤差δRn只和速度誤差δVn有關,如式(3)所示
(3)
姿態四元數Q滿足式(4)所示的微分方程
(4)
根據疊加性誤差模型,并忽略高階小量,可以得到失準角方程如式(5)所示
(5)

綜上,并考慮陀螺輸出常值誤差εb和加速度計輸出常值誤差▽b,飛行中對準系統狀態選擇X=[δRnδVnφnεb▽b]T,系統狀態方程如式(6)所示
(6)
1.2 飛行中對準系統量測方程
北斗衛星接收機測量的第j顆衛星偽距如式(7)所示
(7)
式中,ρj為理想距離,δtu為等效時鐘誤差相應的距離,vρj為偽距測量噪聲。

(8)
將式(8)泰勒級數展開,忽略高階項,并與式(7)作差,則第j顆衛星的偽距誤差如式(9)所示
(9)

為了消除衛星等效時鐘誤差影響,以仰角最大的那顆衛星(記作第1顆衛星)為基準,分別與其他衛星的偽距誤差再次作差,構建第k顆衛星的偽距量測方程
Zρk=[zρk1zρk2zρk3]δRn+vρk
(10)
式中:zρk1=ejx-e1xzρk2=ejy-e1yzρk3=ejz-e1z(k=2,…,j-1)。
同理可得第k顆衛星的偽距率量測方程
(11)
式中,

聯立式(10)與式(11),構建單顆衛星基于偽距/偽距率飛行中對準的觀測方程,應用序貫濾波方法即可處理全部接收到的衛星信息。
2 仿真驗證
通過數學仿真驗證慣性系下,基于北斗衛星偽距/偽距率信息的飛行中對準算法的有效性,飛行中對準的濾波算法采用序貫卡爾曼濾波算法。
2.1 仿真條件
仿真條件設置如下:
1)彈載捷聯慣導系統誤差設置:陀螺常值漂移為3(°)/h,刻度因數誤差3×10-4,加速度計常值偏置1.0mg,刻度因數誤差5×10-4。
2)彈載北斗衛星導航信息輸出誤差設置:偽距誤差10m(1σ),偽距率誤差0.5m/s(1σ),數據更新率10Hz。
3)初始姿態設置:方位0°,俯仰0°,橫滾-45°。
4)初始姿態誤差設置:方位誤差1°,俯仰誤差1°,橫滾誤差1°。
5)初始位置設置:東經120°,北緯40°,高度15km。
6)初始速度設置:600m/s。
7)飛行軌跡采用典型高拋遠程彈道,仿真時間300s,濾波周期為0.1s。
2.2 仿真結果
捷聯慣導系統的失準角估計誤差曲線如圖1~圖3所示,根據誤差曲線可知,飛行中對準算法能夠在10s內收斂失準角,有效估計捷聯慣導系統的姿態誤差,統計10s的失準角誤差如表1所示。
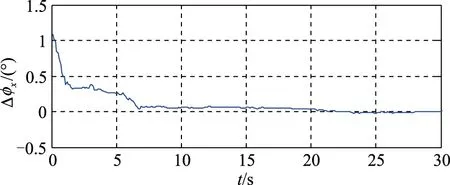
圖1 x向失準角估計誤差曲線Fig.1 Estimation error curve of misalignment angle φx
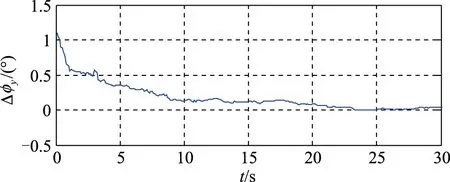
圖2 y向失準角估計誤差曲線Fig.2 Estimation error curve of misalignment angle φy
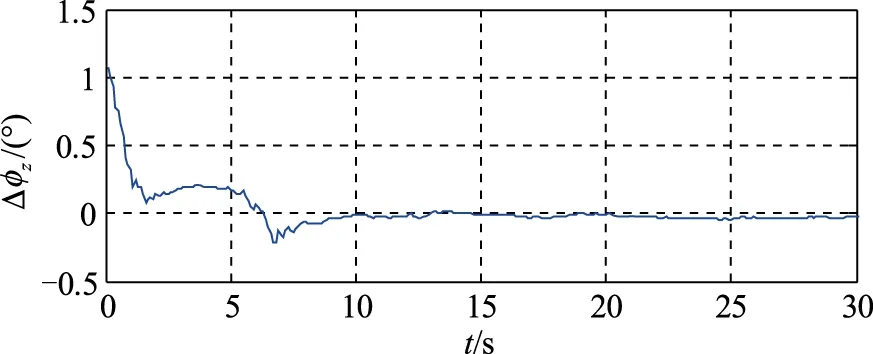
圖3 z向失準角估計誤差曲線Fig.3 Estimation error curve of misalignment angle φz

x向y向z向失準角誤差/(')3.65.41.2
在實際空戰環境中,空空導彈必然面臨電磁干擾等復雜環境,空空導彈距離攻擊目標越近,受到的干擾越強,那么彈載北斗衛星接收機受到干擾的概率也越大。特別是在中制導的后半段,北斗導航系統可能難以正常工作,此時只能依賴慣性導航,其導航誤差因慣性傳感器隨機啟動誤差的制約而逐步發散。隨著空空導彈射程越來越遠,中制導段的飛行時間也相應增長,在中制導前半段對慣性傳感器隨機啟動誤差進行在線標定將成為可能。在線標定能夠提高慣導系統的精度,抑制導航誤差發散的程度,保證中制導精度。下面通過x向陀螺常值漂移的估計說明慣性傳感器隨機誤差的在線標定問題。x向陀螺常值漂移估計如圖4所示。根據估計曲線可知,飛行中對準算法能夠估計慣性傳感器的隨機誤差,慣性傳感器隨機誤差的估計相對失準角而言時間較長。x向陀螺常值漂移估計的快速性和精度統計如表2所示,估計精度用對陀螺常值漂移估計的百分比表示。
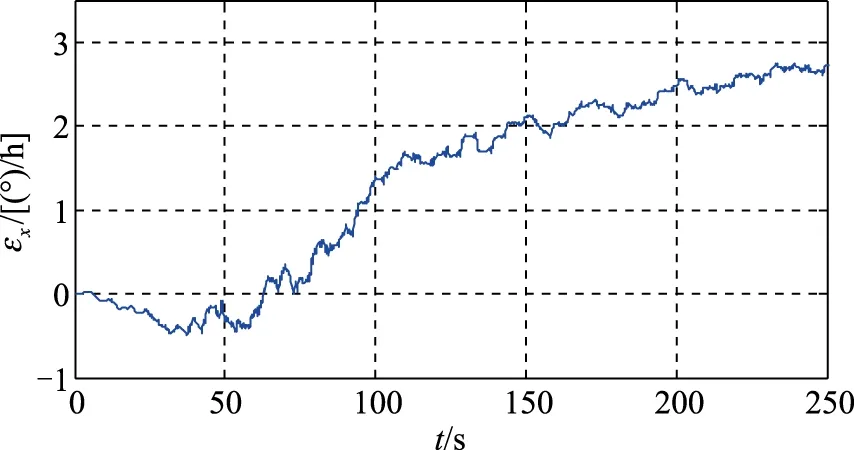
圖4 x向陀螺常值漂移估計曲線Fig.4 Estimation curve of gyroscope constant drift εx

估計時間/s100150200估計精度/%456780
3 結論
針對空空導彈捷聯慣導系統飛行中對準問題,利用彈載北斗衛星導航信息,建立了基于偽距/偽距率的飛行中對準模型,并對北斗衛星接收機鐘差、鐘漂進行了降維處理。仿真結果表明,在飛行過程中該算法10s內的對準精度優于6′,可以解決傳遞對準的對準精度和對準時間之間的矛盾,滿足空空導彈武器系統快速性的要求。同時,該算法在中制導前半段對慣性傳感器隨機啟動誤差進行在線標定補償,保證中制導精度,提高實際空戰中空空導彈的抗干擾能力。
[1] 唐庾梅,魯浩.空空導彈慣導系統對準的原理與方法[J].航空兵器,1998,(1):4-7.
[2] 魯浩,位曉峰,徐劍蕓,等.彈載捷聯慣導空中傳遞對準中火控匹配信息精度研究[J].彈箭與制導學報,2011,31(5):61-64.
[3] 曲法義,魏紀林,崔乃剛,郝淑梅.機載精確制導武器快速傳遞對準[J].哈爾濱工業大學學報,2014,46(1):7-10.
[4] 王得朝,康鵬.基于Kalman濾波的飛行中對準技術研究[J].現代防御技術,2009,37(6):22-25.
[5] 吉慶昌,孔星煒.大航向角誤差情況下飛行中對準研究[J].航空電子技術,2012,43(1):15-19.
[6] 鄭辛,符夢印.SINS/GPS緊耦合組合導航[J].中國慣性技術學報,2011,(1):33-37.
In-flight Alignment for Air-to-air Missile
ZHOU Ben-chuan,LU Hao,DUAN Chao-yang
(Aviation Key Laboratory of Science and Technology on Airborne Guided Weapons,China Airborne Missile Academy,Luoyang 471099,China)
In order to solve the contradiction between precision and rapidity in SINS transfer alignment for air-to-air missile,a new in-flight alignment algorithm is proposed in this paper,according to the missile-borne BDS navigation information.The in-flight alignment model based on pseudo range/pseudo range rate in inertial frame is derived in detail,the model reduction of clock error and clock frequency drift of Beidou receiver is proposed,the measurement equation of in-flight alignment model is optimized.Simulation results show that the algorithm can realize SINS initial alignment during the flight,the alignment precision is better than 6 arc minutes in 10 second,and the algorithm can calibrate the random error of the inertial sensor online,it can increase navigation accuracy of missile-borne SINS and anti-jamming of air-to-air missile further.
In-flight alignment;Pseudo-range/pseudo-range rate;Online calibration
2015-11-05;
2015-11-30。
周本川(1984-),男,高級工程師,主要從事捷聯慣性導航和衛星組合導航技術與應用方面的研究。
U666.1
A
2095-8110(2016)01-0009-04
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32