不同過載自動駕駛儀的對比研究
2016-03-16 06:08:35姜易陽
導航定位與授時 2016年1期
關鍵詞:結構
姜易陽
(北京機電工程研究所,北京100074)
不同過載自動駕駛儀的對比研究
姜易陽
(北京機電工程研究所,北京100074)
針對三種不同結構的過載自動駕駛儀進行了對比研究,推導了駕駛儀控制回路的閉環傳遞函數,并對閉環穩態誤差進行了分析。基于極點配置方法,設計了自動駕駛儀控制參數。在此基礎上,研究了各駕駛儀控制回路對執行機構動力學延遲、非線性環節以及測量噪聲的響應特性,并進行了對比分析,為飛行器過載自動駕駛儀的選型和設計提供了依據。
過載自動駕駛儀;三回路;偽攻角反饋
0 引言
自動駕駛儀是飛行器的重要組成部分,它的主要功能是在飛行包線范圍內,維持飛行器的姿態運動和質心運動的穩定,并根據制導指令控制飛行器在一定的彈道上飛行。根據用途的不同,自動駕駛儀分為過載駕駛儀和角度控制駕駛儀兩類[1],目前使用較為普遍的是過載自動駕駛儀,結構主要有帶PI校正的兩回路過載控制結構、經典三回路過載控制結構[2]以及偽攻角反饋三回路過載控制結構等[3],這三種過載自動駕駛儀具有相同的傳感器需求,即均采用角速率陀螺測量彈體角速度,線加速度計測量彈體過載,但因結構的不同,使得其控制效果和魯棒特性存在較大差異。
本文將理論推導和數學仿真結合,從穩態誤差分析、參數極點配置、對非線性及噪聲的適應性等方面,系統地對比了三種過載自動駕駛儀結構的異同,研究結論為飛行器過載自動駕駛儀的選型和設計提供了參考。
1 過載自動駕駛儀回路結構
本節以飛行器縱向過載控制為例,給出各自動駕駛儀的結構,并推導控制回路的閉環傳遞函數。回路中的彈體傳遞函數由線性化后的彈體動力學方程組推導得到[4],如式(1)~式(3):
(1)
(2)
(3)
1.1 帶PI校正的兩回路過載駕駛儀
帶PI校正的兩回路過載駕駛儀(以下簡稱兩回路過載駕駛儀)在經典兩回路過載駕駛儀的基礎上發展而來,增加了過載跟蹤誤差的積分,以消除穩態誤差,圖1為采用該過載駕駛儀的控制回路結構框圖。

圖1 兩回路過載駕駛儀框圖Fig.1 Structure of two-loop acceleration autopilot
其控制回路包含3個控制參數,忽略舵機環節,得到整個控制回路的閉環傳遞函數為
(4)
其中,各系數如下:


(5)
1.2 經典三回路過載駕駛儀
經典三回路過載駕駛儀在國內外飛行器上均得到了普遍應用,圖2為采用該過載駕駛儀的控制回路結構框圖,可見其包含3個回路,即阻尼回路、增穩回路和過載回路。共有4個控制參數,其中KDC用于補償階躍響應的穩態誤差,使得回路閉環增益為1。
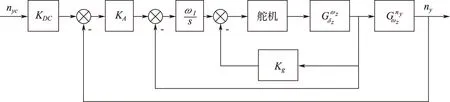
圖2 經典三回路過載駕駛儀框圖Fig.2 Structure of classical three-loop acceleration autopilot
忽略舵機環節,得到整個控制回路的閉環傳遞函數為
(6)
其中,各系數如下:
(7)
1.3 偽攻角反饋三回路過載駕駛儀
偽攻角反饋三回路過載駕駛儀(以下簡稱偽攻角反饋過載駕駛儀)也是一種三回路結構的過載駕駛儀,圖3為其結構框圖。對比圖2、圖3結構可知,經典三回路駕駛儀中的增穩回路為姿態角反饋,而偽攻角反饋駕駛儀將角速率陀螺的測量信號經過一個慣性環節后得到近似攻角,并將其作為增穩反饋。相比于經典三回路駕駛儀結構,其回路閉環增益為1,無需進行增益補償。

圖3 偽攻角反饋過載駕駛儀框圖Fig.3 Structure of three-loop acceleration autopilot with pseudo angle of attack feedback
忽略舵機環節,得到整個控制回路的閉環傳遞函數為
(8)
其中,各系數如下:


(9)
由以上分析可知,兩回路過載駕駛儀傳遞函數存在零點,經典三回路駕駛儀需進行增益補償,而偽攻角反饋過載駕駛儀需引入一項彈體動態特性參數,彼此各有特點。下面從穩態誤差分析、參數極點配置、對非線性及噪聲的適應性等方面進行詳細對比研究。
2 回路閉環穩態誤差分析
由式(4)可知,兩回路過載駕駛儀的閉環穩態誤差為0,且不受彈體動態特性攝動影響。對于經典三回路過載駕駛儀,因KDC與飛行速度相關,若速度存在測量誤差,則閉環穩態誤差不為0。考慮速度測量誤差為ΔVM,則增益補償為
(10)
根據駕駛儀結構可推得閉環傳遞函數如下
(11)
由終值定理可知,穩態誤差為
(12)
可見經典三回路過載駕駛儀的穩態誤差與速度測量誤差及飛行速度相關,飛行速度越低,速度測量誤差越高,則穩態誤差越大。

忽略舵機環節,推導得到該回路結構的閉環傳遞函數如下
(13)
其中,各系數為:
(14)
可見,當控制回路使用的彈體動態特性參數存在誤差時,回路閉環傳遞函數分母上升為四階,并增加了一個零點,由終值定理可知,該條件下的回路閉環穩態誤差仍為0,即偽攻角反饋過載駕駛儀的回路閉環穩態誤差不受彈體動態特性攝動及速度測量誤差的影響。
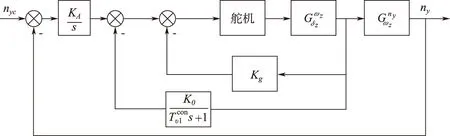
圖4 偽攻角反饋過載駕駛儀框圖Fig.4 Structure of three-loop acceleration autopilot with pseudo angle of attack feedback
3 駕駛儀控制參數極點配置
因各結構駕駛儀回路的閉環特征方程為三階,可采用極點配置方法設置同時滿足閉環回路穩定和時域特性要求的控制參數[5-6]。設極點配置所要求的3個極點由1對振蕩根和1個負數實根組成,并設振蕩根阻尼為μ,自振頻率為ω,一階滯后環節時間常數為τ,則系統期望的閉環特征方程為
(15)
完成極點配置應有回路閉環傳遞函數的分母各項系數與式(15)對應系數相等,得到3個方程,即可解得各控制回路的控制參數。將各過載駕駛儀控制回路的極點配置設為一致,得到階躍響應曲線對比如圖5所示。由曲線可知,因兩回路控制閉環傳遞函數存在零點,其階躍響應與期望回路響應相差較大,且存在超調;而對于經典三回路及偽攻角反饋三回路控制結構,將其極點配置固定后,回路階躍響應與期望響應完全一致,這對回路設計與分析來說是個很大的優勢。
由于采用極點配置,使得各駕駛儀控制回路的閉環傳遞函數極點相同,由自動控制理論可知,各控制回路的開環傳遞函數頻率響應一致,圖6為回路開環頻率特性曲線,理論條件下回路的相角裕度和幅值裕度均較高。

圖5 各過載駕駛儀回路階躍響應對比曲線Fig.5 Step response of three acceleration autopilots
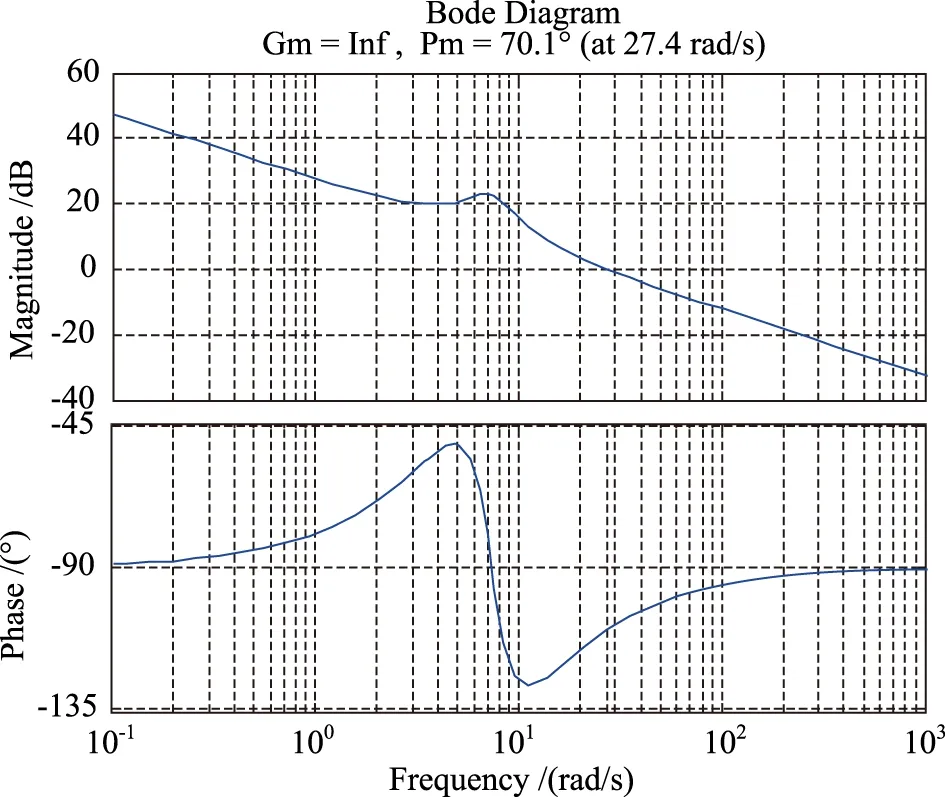
圖6 開環頻率特性曲線Fig.6 Phase-frequency characteristic of open loop
4 動力學和非線性環節的影響
第3節進行駕駛儀控制回路分析時忽略了舵機環節,然而舵機環節對回路的階躍響應和回路裕度均有影響,甚至可能導致理論情況下的穩定回路發散。考慮如式(16)所示的舵機動力學環節
(16)
該舵機模型的帶寬為13Hz。圖7、圖8分別為考慮舵機動力學環節后的回路階躍響應曲線及開環頻率特性曲線,可見回路的階躍響應曲線變化較小,而頻率特性受動力學環節的影響較大。在低頻段,開環頻率特性基本一致,隨著頻率的上升,舵機動力學環節帶來的相位滯后和幅值衰減增大,使得回路的幅值裕度及相角裕度均有所下降。

圖7 各過載駕駛儀回路階躍響應對比曲線Fig.7 Step response of three acceleration autopilots
雖然各控制回路的裕度相同,但因回路結構的不同,階躍響應存在區別,當延遲特性較大時該現象更為明顯。圖9、圖10為在舵機環節輸入前加入純延時環節后各回路的階躍響應曲線和舵偏角響應曲線。
可見,增大動力學環節的延遲后,兩回路過載駕駛儀的階躍響應超調已超出50%,且調節時間較長,而三回路過載駕駛儀對動力學延遲環節的適應性較兩回路過載駕駛儀的強。另外,受設計、生產、加工等環節的影響,實際舵機不可避免地存在死區、間隙等非線性環節。其中,因舵機間隙環節會增大控制回路的相角滯后[7],加大動力學延遲,其對飛行器控制系統的影響較大。圖11、圖12為考慮0.2°的舵機間隙條件下,不同駕駛儀結構回路的階躍響應曲線及舵偏角響應曲線(局部進行了放大)。可以看到,兩回路過載駕駛儀階躍響應處于穩定的周期性振蕩狀態,而三回路過載駕駛儀的階躍響應穩定無振蕩,三回路結構的駕駛儀對舵機間隙的適應性較兩回路結構的更強。

圖8 開環頻率特性曲線Fig.8 Phase-frequency characteristic of open loop(with or without actuator delay)

圖9 各過載駕駛儀回路階躍響應對比曲線Fig.9 Step response of three acceleration autopilots
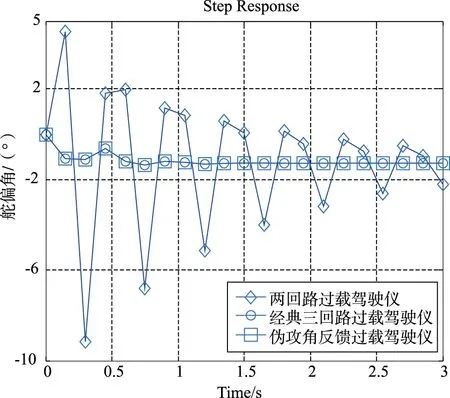
圖10 舵偏角響應曲線Fig.10 Actuator response of three acceleration autopilots

圖11 各過載駕駛儀回路階躍響應對比曲線Fig.11 Step response of three acceleration autopilots
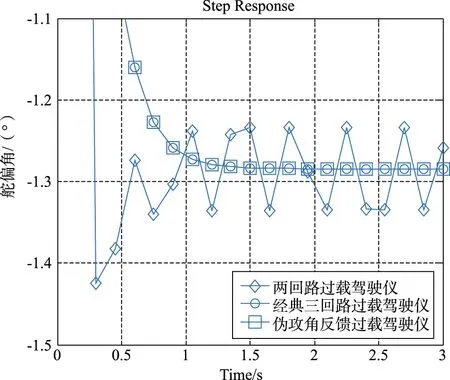
圖12 舵偏角響應曲線Fig.12 Actuator response of three acceleration autopilots
5 對測量噪聲的抑制能力
對于采用純比例導引或其改進形式作為導引規律的飛行器,控制回路輸入的過載指令一般由導引頭獲取的視線角速度信號解算得到,其不可避免地存在測量噪聲,對飛行器控制帶來不利影響。圖13、圖14為在控制回路的輸入端加入相同的零均值高斯隨機白噪聲后,回路的階躍響應曲線及舵偏角響應曲線。

圖13 各過載駕駛儀回路階躍響應對比曲線Fig.13 Step response of three acceleration autopilots
可見三回路的駕駛儀結構對輸入噪聲的抑制要遠強于兩回路駕駛儀結構。進一步分析回路結構可知,兩回路過載駕駛儀舵機輸入信號中包含過載跟蹤誤差(即nyc-ny)的比例項,測量噪聲直接輸入舵機,而三回路結構的過載駕駛儀將過載跟蹤誤差經過了一個積分環節后,再作為舵機的輸入,大幅降低了輸入噪聲的幅值和頻率,有利于飛行器的穩定控制和執行機構的正常工作。
6 結論
本文針對三種典型結構的過載駕駛儀展開了對比研究,根據分析結果可知,三回路結構的過載駕駛儀在沒有增加傳感器需求的前提下,對動力學延遲、非線性環節及輸入噪聲的適應能力均強于兩回路結構。經典三回路過載駕駛儀與偽攻角反饋過載駕駛儀的回路特性基本一致,但經典三回路過載駕駛儀的穩態誤差與飛行器的速度測量誤差相關,而偽攻角反饋過載駕駛儀的穩態誤差不受氣動攝動和測量誤差的影響。在進行過載自動駕駛儀的選型時,若飛行器飛行速度較低且速度測量誤差較大,偽攻角反饋過載駕駛儀更優。
根據本文的仿真分析,在引入舵機間隙環節后,兩回路結構駕駛儀出現了極限環振蕩,而三回路結構駕駛儀響應穩定無振蕩,后續將采用非線性系統描述函數分析方法,對極限環的產生機理進行深入分析。
[1] 林德福,王輝,王江,范軍芳.戰術導彈自動駕駛儀設計與制導律分析[M].北京:北京理工大學出版社,2012.
[2] Paul Zarchan.Tactical and strategic missile guidance[C].Progress in Astronautics and Aeronautics,AIAA,2002.
[3] 王輝,林德福,祁載康.導彈偽攻角反饋三回路駕駛儀設計分析[J].系統工程與電子技術,2012,34(1):129-135.
[4] 李新國,方群.有翼導彈飛行動力學[M].西安:西北工業大學出版社,2005.
[5] 朱敬舉,祁載康,夏群力.三回路駕駛儀的極點配置方法設計[J].彈箭與制導學報,2007,27(4):8-12.
[6] 刁兆師,單家元.基于預測校正的三回路駕駛儀極點配置設計[J].系統工程與電子技術,2012,34(8):1668-1674.
[7] 程鵬.自動控制原理[M].北京:高等教育出版社,2007.
Comparative Study on Three Acceleration Autopilots
JIANG Yi-yang
(Beijing Electro-mechanical Engineering Institute,Beijing 100074,China)
Three different types of acceleration autopilot have been analyzed in detail.Based on the closed-loop transfer function derivation,the steady state errors of each control loop have been compared.The gains of the autopilot were derived through pole assignment method.Step responses of three autopilots with dynamic delay,non-linear element,and measurement noise have been evaluated.The comparative study provides the basis for acceleration autopilot design and selection.
Acceleration autopilot;Three-loop;Pseudo angle of attack feedback
2015-05-07;
2015-06-11。
姜易陽(1987-),男,工程師,主要從事飛行器制導與控制技術方面的研究。
TJ765.2
A
2095-8110(2016)01-0040-07
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50