機載雙軸旋轉調制激光慣導系統誤差特性及關鍵技術分析
2016-03-16 06:36:44雷宏杰王曉斌
導航定位與授時 2016年4期
關鍵詞:系統
雷宏杰,王曉斌,劉 放
(中航工業飛行自動控制研究所,西安 710065)
機載雙軸旋轉調制激光慣導系統誤差特性及關鍵技術分析
雷宏杰,王曉斌,劉 放
(中航工業飛行自動控制研究所,西安 710065)
在未來作戰環境下,長航時遠程作戰飛機對全自主長航時高精度導航系統提出了迫切的需求,對提高作戰能力起著重要作用。對比各種導航手段,其中雙軸旋轉調制激光慣導系統是目前唯一一種可行的全天候全自主高精度導航手段,從雙軸旋轉調制慣導系統的原理出發,對雙軸旋轉調制激光慣導系統機載應用的誤差特性及關鍵技術進行深入分析,結果表明:對于1n mile/12h的導航精度,雙軸旋轉調制慣導系統較捷聯慣導系統對陀螺漂移精度要求降低一個數量級,關鍵技術實現方案合理可行。
激光慣導系統;雙軸旋轉調制;誤差特性;關鍵技術;機載
0 引言
在未來作戰環境下,長航時遠程作戰飛機對全自主長航時高精度導航系統提出了迫切的需求,作為遠程作戰飛機任務及火控系統的核心信息源,在復雜電磁環境下為其提供長航時飛行或武器發射所需的全自主、高精度導航信息,對提高長航時遠程作戰飛機準確到達、精確打擊和有效偵察等作戰能力起著重要作用。
目前全自主導航手段有慣性導航系統、慣性/天文組合導航系統、慣性/景象或地形匹配組合導航系統。其中慣性導航系統具有全天候、全自主導航的優點,也是其他導航手段無法比擬的;但慣性導航系統的最大缺點是因慣性器件誤差而導致的誤差隨時間積累特性,即導航精度隨時間下降。要在短時間內提高慣性器件精度受工藝水平及成本的限制,而且精度提高是有限的,仍然無法滿足長航時遠程作戰飛機的使用需求。目前,國內外采用旋轉調制技術可以自動抵消慣性器件常值誤差,是一種有效提高慣導系統長航時導航精度的手段[1]。
慣性/天文組合導航系統也是一種自主導航手段,可達到較高的導航精度,但天文導航受天氣情況影響較大,并不能稱作是一種全天侯的自主導航手段。
慣性/景象或地形匹配組合導航系統雖然在某些情況下也可達到較高的自主導航精度,但受地形數據庫的限制,只能在部分區域達到較高精度,所以也無法滿足遠程作戰飛機高精度導航需求。
另外,對于衛星導航、多普勒雷達等導航方式,雖然可以達到較高的導航精度,但是在戰場環境下易受干擾和欺騙,不屬于全自主導航手段。
綜上,基于現階段慣性器件技術發展水平,旋轉調制慣性導航系統是唯一一種可行的全自主全天候高精度導航手段,近幾年在國內外研究較多,本文將從旋轉調制慣導系統的原理出發,對其機載應用的關鍵技術及誤差特性進行深入分析。
1 機載旋轉調制慣導系統簡介
旋轉調制慣導系統按旋轉軸來分,有雙軸旋轉調制、單軸旋轉調制及三軸旋轉調制,其中單軸旋轉調制系統只能調制兩個陀螺誤差,所以精度提高有限。而三軸旋轉調制系統,相比雙軸旋轉調制系統理論極限精度相當,但系統復雜程度、體積、重量、成本提高,可靠性相對降低,綜合考慮長航時遠程飛機機動特點,雙軸旋轉調制系統更適宜,所以本文主要討論雙軸旋轉調制激光慣導系統[1]。
圖1所示為雙軸旋轉調制式激光慣導結構示意圖,慣性測量單元(IMU)固定于雙軸旋轉機構上,其中內框與IMU的方位軸一致,外框與IMU的橫滾軸一致。實際工作過程中,IMU通過雙軸轉位機構分別繞其方位軸和橫滾軸進行180°的定期定序轉位運動[2-3]。
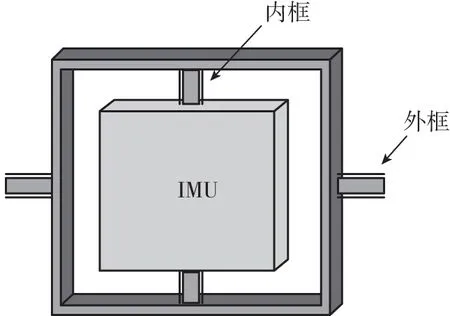
圖1 雙軸旋轉調制式慣導結構示意圖Fig.1 Structure diagram of double-axis rotation-modulating INS
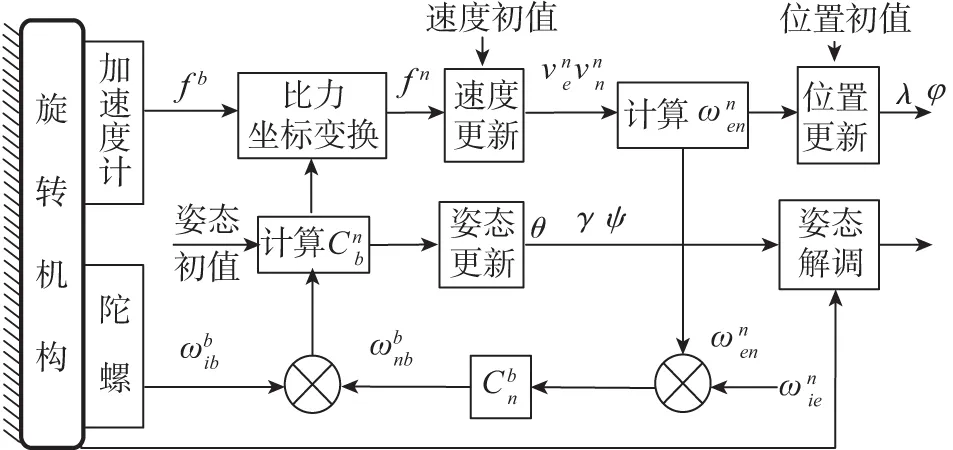
圖2 系統解算框圖Fig.2 Calculation diagram of the system
根據慣導系統模型,陀螺和加速度計的輸出可表示為:
(1)

(2)

將式(1)和式(2)分別展開并忽略二次項,得到陀螺和加速度計的輸出誤差為:
(3)

(4)
經過旋轉變換后,雙軸旋轉調制式激光慣導系統與常規捷聯慣導系統的誤差傳播方程一致,可用如下公式表示:
(5)

(6)

2 系統誤差特性分析及誤差分配
2.1 機載捷聯慣導誤差特性
雙軸旋轉調制慣導系統的實質還是捷聯慣導系統,為了比較兩者的誤差特性,首先對捷聯慣導系統的誤差特性進行了分析及誤差分配。由捷聯慣導誤差方程可知,造成位置誤差發散的只有北向陀螺漂移和天向陀螺漂移,其他因素造成的誤差長期來看都是振蕩的。以下在1nmile/12h的系統精度前提下,通過誤差分析,給出陀螺漂移、加計零偏和初始對準偏角應滿足的精度要求。
1) 陀螺漂移
在長時間導航中,若只考慮地球振蕩周期,則位置誤差與地理系下等效陀螺漂移的關系為[6]:
(7)
由式(7)可以看出,最終引起位置誤差發散的僅有北向和天向陀螺漂移,二者的綜合作用為εp(εp=εncosφ+εusinφ),實質上代表的是地球極軸方向的漂移。對于1nmile/12h的系統精度要求,由式(7)可得εP=0.0014(°)/h。為了保證εP<0.0014(°)/h,通常εn和εu均應小于0.001(°)/h。
在捷聯慣導系統中,機體系X、Y、Z軸的陀螺漂移對于εn和εu都有貢獻,為了保證εn和εu都小于0.001(°)/h,則εX、εY應小于0.0007(°)/h,εZ應小于0.001(°)/h。
2)加計零偏
加計零偏不會引起位置誤差的發散,但會引起位置誤差振蕩,其誤差傳播方程可簡化為:
(8)
(9)
若要滿足1nmile/12h的系統精度要求,對于加計零偏來講,也即要求其造成的位置誤差振蕩的最大值小于1nmile。另外載體靜止時,加計零偏和水平平臺偏角構成平衡,而在載體機動時,上述平衡被破壞。特別是當載體航向變化180°時,由此造成的影響最大。這種情況下,由式(8)和式(9)可得▽n和▽e應小于7×10-5g和6×10-5g(取緯度φ=34°)方能滿足系統精度要求。同陀螺漂移的分析一樣,機體系下的加計零偏▽X、▽Y和▽Z均應小于4×10-5g。
3)初始偏角
初始偏角造成的位置誤差也是振蕩性質的,水平偏角主要引起舒拉振蕩,而方位誤差主要引起的是地球周期振蕩,其誤差傳播形式為:
(10)
(11)
(12)
單獨考慮某一項誤差,若要滿足1nmile/12h系統精度要求,則水平偏角φE0和φN0應小于10″,方位偏角φU0應小于30″。
以上分析都是基于單項誤差,實際系統中上述誤差對系統精度都有影響,綜合考慮各項誤差,作如表1所示誤差分配。
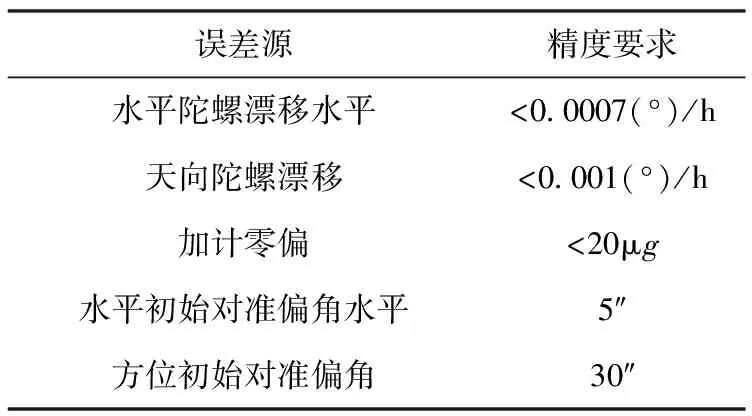
表1 長航時慣導系統誤差分配
2.2 機載雙軸旋轉調制激光慣導系統誤差特性
1) 誤差特性分析
由上述誤差仿真結果可以看出,要想實現1n mile/12h的系統精度,陀螺精度要優于0.0007(°)/h,加計零位要優于20μg,同時對初始對準精度也有較高的要求,但目前國內的慣性器件水平難以滿足要求,在此情況下,采用雙軸旋轉調制技術不失為一種有效的系統解決方案,在慣性器件水平不變的前提下,可通過IMU的雙軸旋轉調制有效提高系統自主導航精度[8]。如下對機載雙軸旋轉調制激光慣導系統誤差特性進行分析并對其誤差項進行分配。
通過IMU雙軸旋轉調制,慣導系統誤差項可分為兩類:一為可自動抵消的誤差項,二為不可自動抵消的誤差項。其中可自動抵消的誤差項中,部分誤差項雖然不會引起發散性誤差,但會引起鋸齒性誤差,需要加以控制。各誤差項統計如表2所示,可自動抵消的誤差項包括:陀螺常值、陀螺安裝偏角誤差、陀螺標度因子誤差(雙軸旋轉引起的部分)、加計常值、加計安裝偏角誤差;不可自動抵消的誤差項包括:慣性器件隨機誤差(主要為陀螺隨機游走誤差)、陀螺標度因子誤差(地球自轉引起的部分)、系統初始對準誤差、加計標度因子誤差、慣性器件磁致誤差。
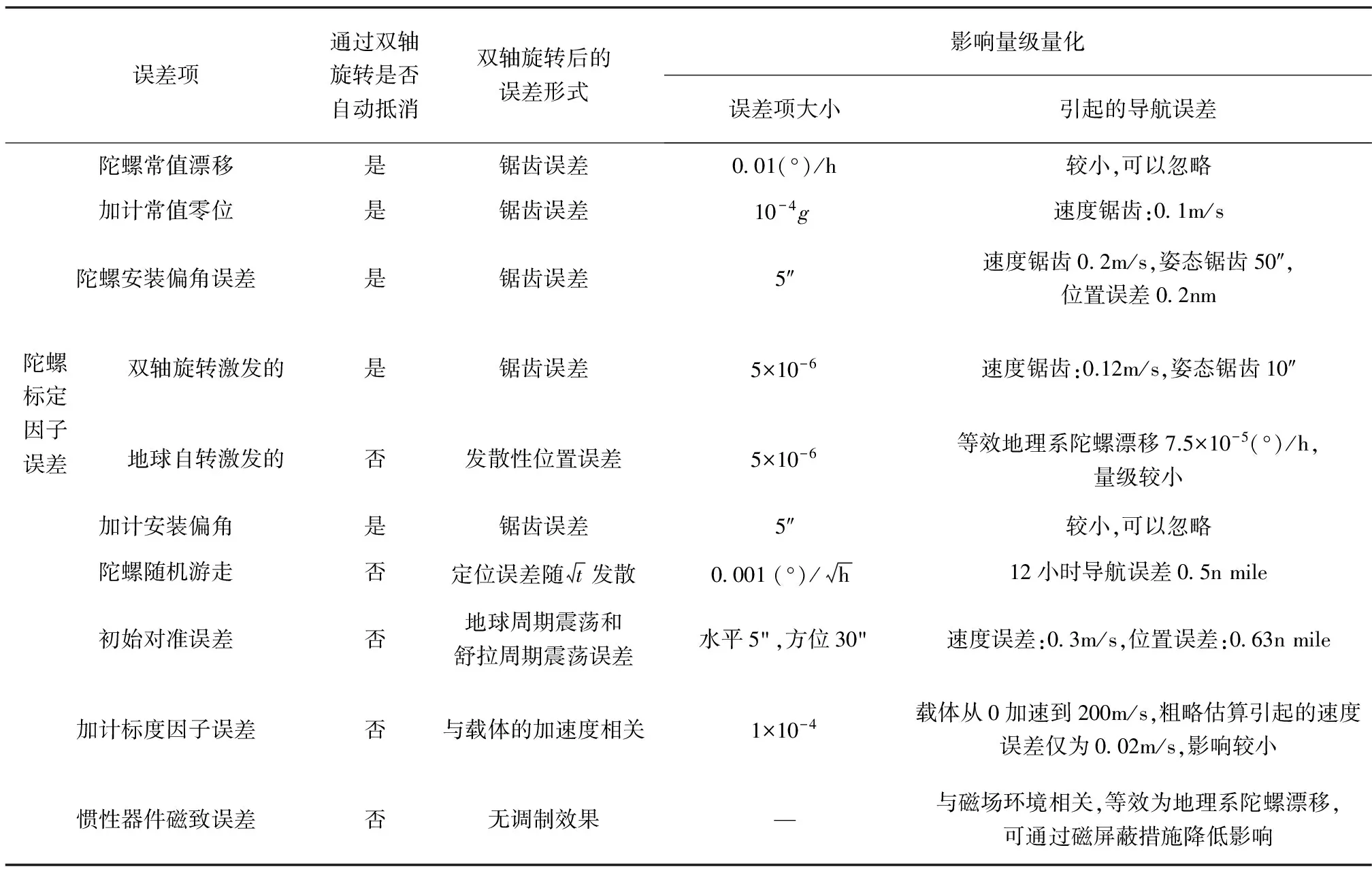
表2 雙軸旋轉調制激光慣導系統誤差項
(13)
2.3 仿真結果
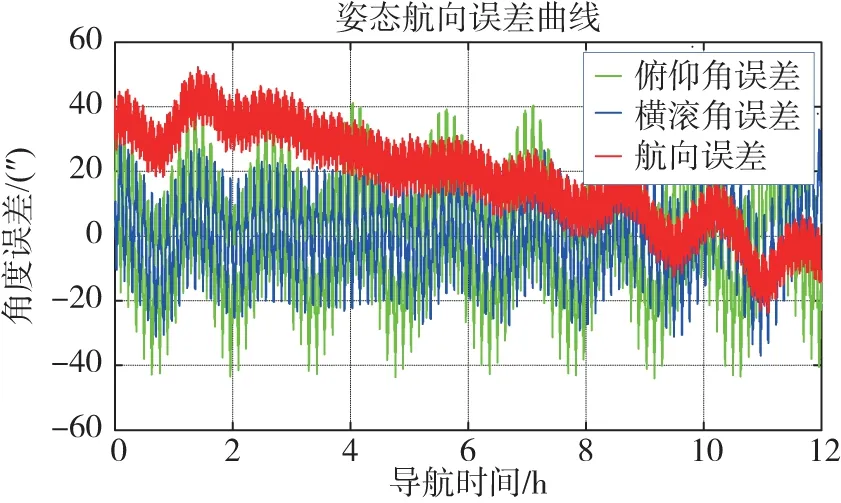
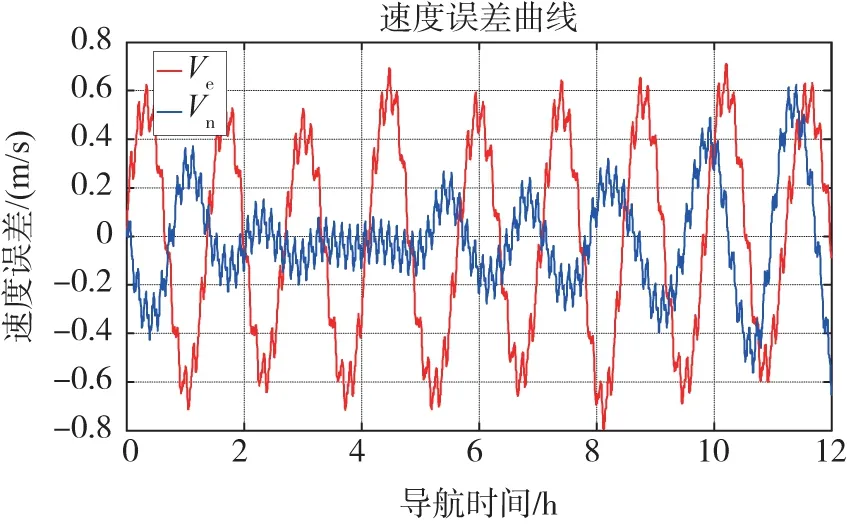
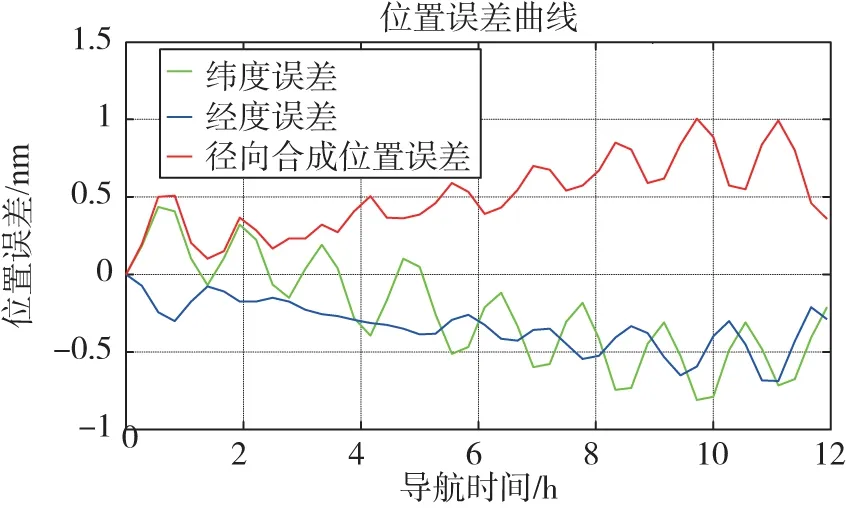
圖3 雙軸旋轉調制慣導系統誤差仿真結果Fig.3 Error characteristic simulation of double-axis rotation-modulating INS
3 機載雙軸旋轉調制激光慣導系統關鍵技術分析
3.1 雙軸轉位策略設計及優化
雙軸轉位策略設計及優化是首先需要解決的關鍵技術問題,只有通過合理的IMU轉位順序編排與控制,才能使各誤差項最大程度的自動抵消,而且可以將IMU雙軸旋轉激發出慣性器件安裝偏角、刻度系數等誤差項的影響降到最低;反之,如果雙軸旋轉方案設計不合理,將產生較大的速度、姿態鋸齒振蕩誤差,甚至會出現較大的調制剩余誤差,嚴重影響導航精度提升。
雙軸轉位策略設計及優化要根據各誤差項的大小進行適應性的調整,沒有一種雙軸旋轉策略針對所有情況都是最優的,而是針對特定誤差項情況是相對最優的,所以雙軸旋轉策略設計的前提是明確慣性器件誤差項特性,從而有針對性的進行設計。
針對表2中各誤差項進行仿真及試驗驗證,本文設計了一種相對最優的16位置雙軸轉位策略(見表3),可使各誤差項最大程度的自動抵消,而且可以將IMU雙軸旋轉激發出慣性器件安裝偏角、刻度系數等誤差項降到最低。由于篇幅所限,雙軸轉位策略設計過程不再詳述。
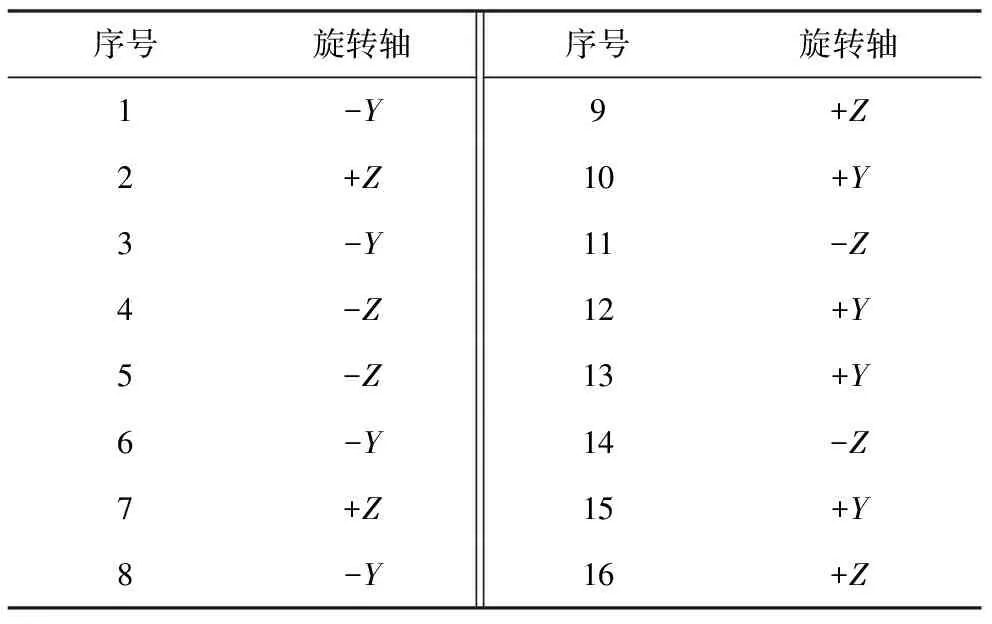
表3 16位置旋轉方案
3.2 載體角運動隔離
雙軸旋轉調制技術是基于IMU在地理系轉位的平穩性、對稱性來實現慣性器件常值誤差的自動抵消,由式(5)、式(6)可知,載體角運動勢必會影響IMU相對于地理系轉位的對稱性,甚至破壞預期的轉位編排,從而影響慣性器件常值誤差的自動抵消效率。針對長航時遠程飛機飛行基本剖面,對雙軸轉位策略影響最大的是飛機的航向轉彎運動。要減小載體角運動影響,就必須利用系統自身雙軸旋轉框架對載體角運動進行隔離,即雙軸旋轉機構不僅要執行預期的雙軸轉位順序,而且還要隔離載體角運動[10]。
系統采取雙軸旋轉結構,要完全隔離IMU敏感到的載體相對于地理系的角運動顯然是不可能的,但是考慮到長航時遠程飛機運動特點,可采取方位完全隔離、水平部分隔離的方案[11]。本文提出的載體角運動雙軸隔離方案示意圖如圖4所示,其中ωR為指令角速度,ωs、ωb分別為IMU敏感到的敏感軸向和機體系角速度,經過車載動態驗證,此方案可最大程度地隔離載體的角運動,使IMU盡可能地按照設定轉位順序相對于地理系進行有序的轉位,有效保證系統動態導航精度。
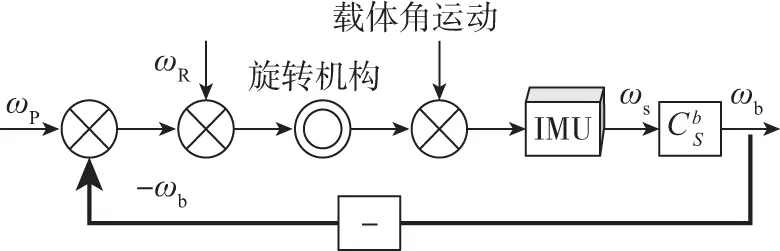
圖4 載體角運動隔離示意圖Fig.4 Carrier angular motion isolation scheme
3.3 高精度快速抗擾動初始對準技術
現代戰爭對飛機的快速反應特性及武器系統的高精度打擊能力等提出了更高的要求,尤其提出了慣導系統必須縮短地面對準時間,并且同時可進行發動機開車、飛控自檢、掛彈加油等全新作戰操作模式。對此,必須對晃動基座條件下如何實現雙軸旋轉調制慣導系統快速精確對準方案進行設計。
雙軸旋轉調制慣導系統較捷聯慣導系統而言,在對準過程中IMU可進行雙軸轉位,從而可大幅度提高各誤差項的可觀測性[6,8],不存在東向陀螺漂移與航向偏角“相抵”、水平加計零位與姿態偏角“相抵”的對準極限精度情況,從而通過基于雙軸旋轉及卡爾曼濾波器的初始對準,可實現高精度快速對準,如下針對表2誤差項進行仿真,從誤差收斂曲線可知,姿態對準精度優于2″,航向對準優于30″。對于抗擾動對準,需針對針實際環境調整濾波參數并設計相應的門限,在此就不再詳述。
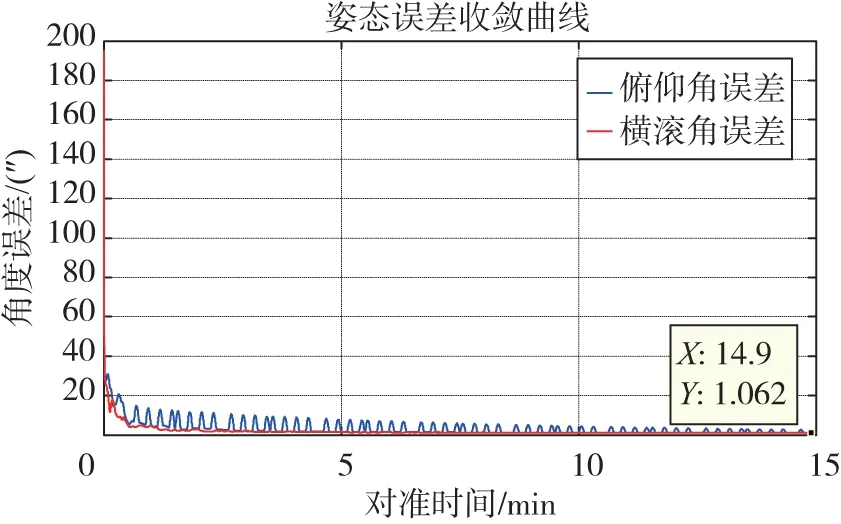
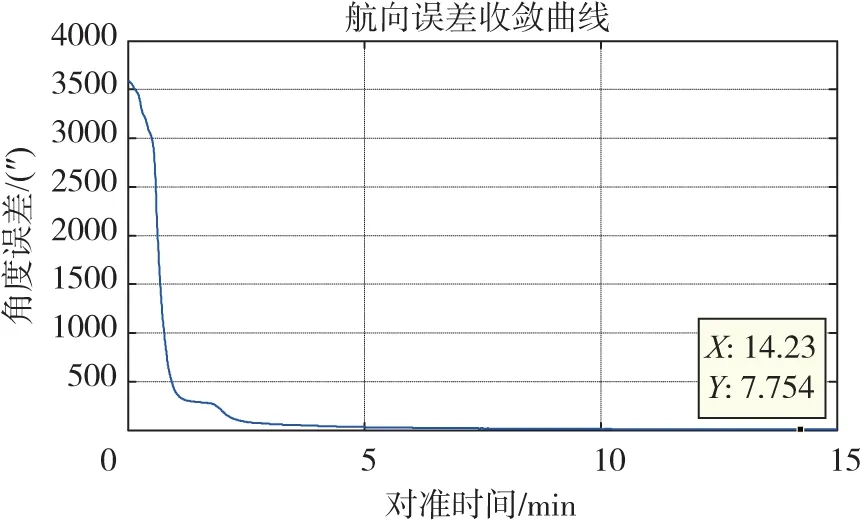
圖5 旋轉對準過程姿態航向誤差收斂曲線Fig.5 Convergence plots of attitude and heading estimation during the rotation alignment
4 結論
綜合上述分析,本文論述總結如下:
1)要滿足1nmile/12h的機載長航時導航性能,雙軸旋轉調制激光慣導系統較捷聯慣導系統對陀螺漂移精度要求降低一個數量級,實現途徑合理可行,是解決機載長航時高精度全自主導航的一種重要技術途徑;
2)針對1nmile/12h的導航精度,對雙軸旋轉調制慣導系統誤差項進行了分配,并對各誤差項引起的導航誤差形式進行了定性定量的分析;
3)分析了雙軸旋轉調制激光慣導系統關鍵技術,并提出了相應解決措施。
[1] 陸志東,王曉斌.系統級雙軸旋轉調制捷聯慣導誤差分析及標校[J].中國慣性技術學報,2010, 18 (2):135-141.
[2]HibbardR,WylieB,LevisonE.SperryMarineMK-49,theworld’sbestringlasergyroship’sinertialnavigationsystem[J].JSDEProceedings,Orlando,FL,November,1996.
[3]TuckerT,LevisonE.TheAN/WSN-7Bmarinegyrocompassnavigator[C]//IONNTM2000.Anaheim,CA, 26-28January, 2000:348-357.
[4] 袁保倫,饒谷音.光學陀螺旋轉慣導系統原理探討[J].國防科技大學學報,2006, 28 (6):76-80.
[5]IshibashiS,TsukiokaS,YoshidaH.Accuracyimprovementofaninertialnavigationsystembroughtaboutbytherotationalmotion[C].OCEANS2007-Europe,2007.
[6] 于飛,孫騫,張亞,等.雙軸旋轉式慣導系統自標定技術[J].哈爾濱工業大學學報,2015,47(1):118-123.
[7] 秦永元.慣性導航[M].北京:科學出版社, 2006:69-72.
[8]SunFeng,SunWei,WuLin.CoarsealignmentbasedonIMUrotationalmotionforsurfaceship[C].IEEEPositionLocationandNavigationSymposiumPositionLocationandNavigationSymposium,2010.
[9]ChangGuobin,XuJiangning,LiAn,etal.ErrorAnalysisandSimulationoftheDual-AxisRotation-DwellAuto-CompensatingStrapdownInertialNavigationSystem[C].InternationalConferenceonMeasuringTechnologyandMechatronicsAutomation,2010.
[10] 張倫東,練軍想,胡小平.載體角運動對旋轉式慣導系統旋轉調制效果的影響[J].國防科技大學學報,2011,33(4):152-156.
[11] 常國賓,許江寧,李安,等.載體運動對雙軸連續旋轉調制式慣導方案誤差的影響[J].中國慣性技術學報,2011,19(2):175-179.
Analysis on Error Characteristics and Key Technology of Airborne Double-Axis Rotation-Modulating RLG INS
LEI Hong-jie, WANG Xiao-bin, LIU Fang
(Flight Automatic Control Research Institute FACRI Xi’an, Xi’an 710065, China)
In the coming combat circumstance, the long-range combat aircraft puts forward urgent requirement to full-autonomous, long-duration and high-accuracy navigation system, which plays an important role in improving the combat capability.Through contrast and analysis, the double-axis rotation-modulating RLG INS is the only all weather, full-autonomous and high-accuracy navigation system at present.The paper proceeds from the principle of double-axis rotation-modulating INS, then, analyses in depth the error characteristics and key technology of airborne double-axis rotation-modulating RLG INS.The results show that, for navigation accuracy achievement of 1.0n mile per 12hours, the accuracy requirements to RLG drift are deceased one order of magnitudes by using double-axis rotation-modulating RLG INS comparing with strapdown INS.Furthermore, the implementation scheme of the key technology is reasonable.
RLG INS;Double-axis rotation-modulating;Error characteristics;Key technology;Airborne
10.19306/j.cnki.2095-8110.2016.04.003
2016-04-05;
2016-05-15。
雷宏杰(1970-),男,研究員,主要從事慣性技術工程應用的研究。E-mail:618gdb104@facri.com
U666.12
A
2095-8110(2016)04-0013-06
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32