磁懸浮慣性穩定平臺硬件設計與實現
2016-04-01 10:11:20葉濤于嘯男
科技視界 2016年7期
葉濤++于嘯男
【摘 要】本文介紹磁懸浮慣性穩定平臺的工作原理。提出了慣性穩定平臺的硬件電路總體設計方案,設計了以FPGA+DSP為核心的硬件控制系統。描述了硬件系統的組成,數字電路系統和模擬電路系統,并分別介紹各個電路系統的組成部分以及功能。詳細描述了旋轉變壓器的設計、控制系統設計和電機驅動設計過程。
【關鍵詞】慣性穩定平臺;硬件電路;FPGA+DSP;控制系統;電機驅動
Designed And Implementation of hardware circuit for magnetic levitation inertial stabilization platform
YE Tao1,2 YU Xiao-nan2
(1.School of Information and Communication Engineering, North University of China, Taiyuan Shanxi 030051, China;
2.Beijing Aerospace Control Institute, Beijing 100039, China)
【Abstract】In this paper, the working principle of magnetic levitation inertial stabilization platform is introduced. The hardware circuit design scheme of inertial stabilization platform is given, and the hardware control system based on FPGA+DSP is designed. The composition of the hardware circuit, the digital circuit system, and the components and functions of each circuit are described. The process of the rotary transformer、the control system and the motor driver design are described in detail.
【Key words】Inertial platform; Hardware circuit; FPGA+DSP; Control system; Motor driver
0 引言
慣性穩定平臺是實現高分辨率航空對地觀測的關鍵設備,使用慣性穩定平臺能夠有效的隔離載體運動對遙感載荷產生的干擾[1]。慣性穩定平臺可以承載較重的的有效載荷,通過固連于臺體的陀螺敏感由機載機身角運動,線振動或者其他因素引起的臺體干擾角運動,通過反饋控制計算機和電機的作用,驅動臺體進行反向補償運動,從而是有效載荷的視軸穩定在慣性空間里。在此基礎上,利用高精度定位定向系統(POS)測量水平姿態基準,與陀螺穩定回路進行復合控制,使有效載荷視軸準確跟蹤當地垂線,保證高分辨率對地觀測。介紹以FPGA+DSP結構為核心的穩定平臺硬件系統設計。利用FPGA邏輯控制能力和并行處理機制實時的采集POS、陀螺、角度傳感器的數據,并通過DSP完成控制回路計算。
1 慣性穩定平臺硬件系統總體設計
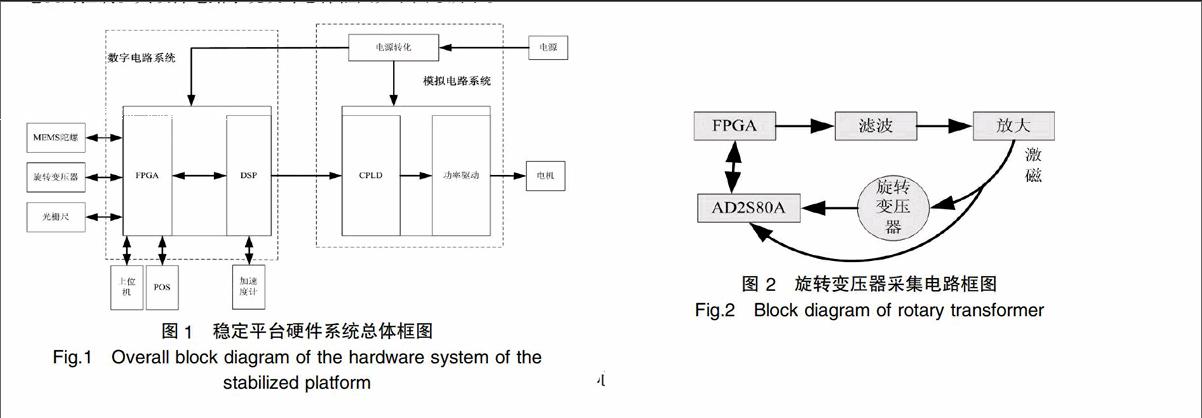
穩定平臺電路采用以FPGA+DSP為核心的數字、模擬混合電路系統,主要包括數據采集、信息處理、電機驅動、電源轉換等部分。數據采集部分主要包括陀螺角速率、旋轉變壓器、光柵尺、POS(高精度定位定向系統)等信息的采集。信號處理部分以DSP處理器為核心,通過外設接口的地址總線、數據總線、控制總線將FPGA中的數據讀到內存中[2],然后經過相應的數據處理和控制策略解算,輸出驅動電機的使能信號和PWM信號。電機驅動部分主要包括功率放大、光耦隔離、電機換向等部分。由CPLD根據霍爾信號產生電機控制的換向表。電機使能信號、功放后的PWM信號和換向表三者共同作用實現對無刷電機的控制。其硬件電路系統設計總體框圖如下圖1所示。
慣性穩定平臺系統采用通過FPGA+DSP協同處理的主要基于FPGA和DSP各自的優勢決定。FPGA支持并行和流水結構。這樣可以通過多個處理單元并行工作,很適合多傳感器的數據的并行采集。由于FPGA在復雜算法實現的局限性,因此,在FPGA的基礎上增加DSP核,以提高控制回路的計算能力。同時,DSP專注于回路的控制運算,從而提了系統的響應速率。
2 數字電路系統設計
慣性穩定平臺硬件電路系統主要分為FPGA模塊和DSP模塊。其中FPGA選擇XILINX公司生產的XC3S500E,該FPGA擁有豐富的邏輯資源和乘法器資源,能夠充分滿足設計任務對傳感器數據采集和處理的要求,并為后續的功能擴展預留了足夠的邏輯資源[3]。而DSP選擇TI公司生產的TMS320F2812,具有較高的性價比,靈活的指令系統和操作性能,高速的運算性能。把最適合電機和運動控制應用的外圍設備嵌入到其中。其DSP運算主頻可達150MHz,可以滿足系統對控制回路計算的任務要求。
2.1 FPGA模塊
慣性穩定平臺系統對數字量輸出的傳感器,可以采用串行通信的方式進行數據采集。其中MESM陀螺和光柵尺采用RS-422接口,POS采用RS-232接口。FPGA模擬串口通信的接口協議完成MESM陀螺、光柵尺、POS數據的采集。而旋轉變壓器輸出的是正余弦的模擬信號,需要通過一個軸角轉換芯片AD2S80A轉化為數字量,便于FPGA采集。
根據任務精度的要求不同,旋轉變壓器的采集可以分為單通道和雙通道。單通道RDC轉換電路具有結構簡單、抗沖擊性能和抗震性能良好、可靠性高、成本相對較低等優點[4],主要應用與精度要求不太高的場合。本文采用單通道旋轉變壓器的數據采集,其硬件電路原理框圖如圖2所示。
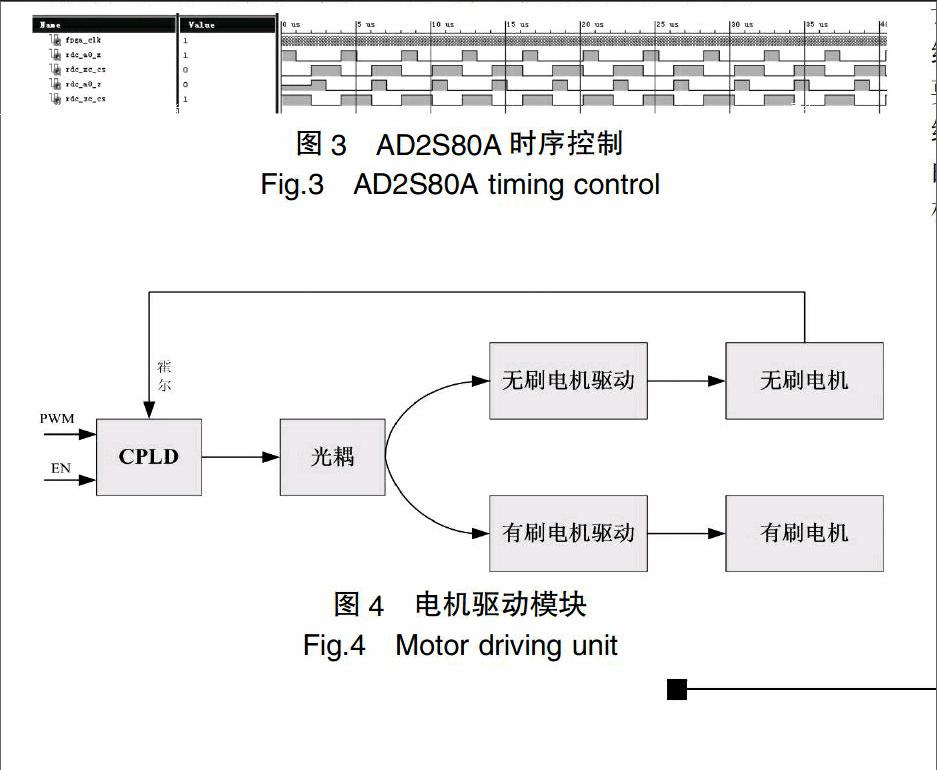
FPGA通過邏輯單元進行分頻產生2KHz的方波信號,通過一個中心頻率為2KHz帶寬為100Hz的二階帶通濾波,選擇基頻為2KHz的正弦信號,在經過比例放大電路,放大到均值為4V,最大能夠提供0.75A的電流,頻率為2KHz的正弦波作為旋轉變壓器的激磁信號。然后通過FPGA生成AD2S80A軸角轉換芯片的控制時序,完成軸角轉換芯片對旋轉變壓器的采集。其RDC控制時序圖如下圖3所示。
其中fpga_clk為時鐘信號;rdc_xc_cs和rdc_zc_cs分別為x軸和z軸的AD2S80A端口的控制信號;rdc_a0_x和rdc_a0_z分別為x軸和z軸的位選信號。
2.2 DSP模塊
DSP主要負責陀螺穩定回路、姿態調平/跟蹤回路、位置鎖定回路的控制計算;電機控制量PWM;使能信號的輸出。此外DSP利用其嵌入式SPI外設接口實現對加速度傳感器的A/D采集和數據處理、DSP通過并行總線和FPGA進行數據交互。
系統選用的加速度計為石英繞性加速度計。石英繞性加速度計輸出信號是與外部加速度成正比的輸出電流信號,此信號需要經過一個高精密采樣電阻轉化為電壓信號[3],在通過模擬濾波后,接入到AD7734芯片的輸入端,然后DSP利用其SPI接口外設對AD7734進行數據采集。
3 模擬電路系統設計
模擬電路系統主要功能有過流保護、過壓保護、電壓轉換、信號光耦隔離、方位無刷電機的換相和驅動、俯仰和橫滾有刷電機驅動信號功率放大;系統方位軸電機選用直流無刷力矩電機。直流無刷力矩電機采用霍爾元件做位置傳感器實現位置反饋,利用電機霍爾信號產生精確的換相控制[5]。穩定平臺的俯仰、橫滾軸端的電機則是選用直流有刷電機。其電機驅動框圖如圖4所示。
4 結束語
本文介紹了磁懸浮穩定平臺的硬件組成。設計一種基于FPGA+DSP的穩定平臺控制系統,利用FPGA和DSP各自優勢,簡化電路設計,提高系統的響應速率。系統主要分為兩個部分,數字電路系統是系統計算處理的核心,主要負責信息的采集和處理,模擬電路系統是主要負責電機的驅動和系統電源的供應。通過硬件系統測試,該設計系統中FPGA能夠實時的、穩定的采集傳感器數據;DSP能夠準確、實時的完成回路的控制運算;CPLD能夠產生精確的換向表完成對回路電機的控制。
【參考文獻】
[1]周向陽,房建成,俞瑞霞,等.一種高精度大負載慣性穩定平臺方位支承系統的制作方法[P].中國,201210377506[P].2013-01-16.Zhou Xiangyang,Fang Jiancheng,Yu Ruixia.A method for manufacturing high precision and large load intertia stabilized platform bearing system[P]: China,201210377506[P].2013-01-16.
[2]官濤.基于FPGA+DSP的振動主動控制器的研制[D].哈爾濱工程大學,2012.Guan Tao.Design of Active Vibration Controller Based on FPGA and DSP[D].Harbin Engineering University,2012.
[3]丁楠,丁偉,蔣鴻翔.基于FPGA和DSP的光電吊艙控制系統設計與實現[J].導航與控制,2013,12(4):21-24.Ding Nan,Ding Wei,Jiang Hongxiang.Design and Realization of Control System on Electro-Optical Pod Based on DSP and FPGA[J].Navigation and Control,2013,12(4):21-24.
[4]彭俊峰,姬建偉,宋家友,等.三種軸角數字轉換電路的分析與比較[J].微計算機信息,2006,17(6-2):8-10.Peng Junfeng,Ji Jianwei,Song Jiayou.Analysis and comparison of three kinds of resolver-to-digital conversion circuits[J].Microcompute Information, 2006,17(6-2):8-10.Wen Ting,Liu Xiaofang,Yang Xu.Data acquisition system of quartz accelerometer based on DSP[J].Computer Measurement & Control, 2010.18(11):2659-2662.
[5]陳永華.霍爾效應在無刷直流電機控制中的應用[J].實驗科學與技術,2011,09(2):34-36.Chen Yonghua. Application of hall effect in the control of brushless DC motor[J].Experiment Science and Technology,2011,09(2):34-36.
[責任編輯:王楠]