一種基于徑向充磁的霍爾式新型角度傳感器
2016-04-12 11:51:04王新峰許彬彬戴立業(yè)張金輝陳文薌
廈門大學學報(自然科學版) 2016年1期
王新峰,許彬彬,戴立業(yè),張金輝,陳文薌
(廈門大學物理與機電工程學院,福建廈門361005)
?
一種基于徑向充磁的霍爾式新型角度傳感器
王新峰,許彬彬,戴立業(yè),張金輝,陳文薌*
(廈門大學物理與機電工程學院,福建廈門361005)
摘要:利用徑向磁鐵的磁感應強度沿徑向同心圓正弦分布的特點,設計了一款新型角度傳感器.分析了基于線性霍爾元件和徑向充磁的角度測量原理,給出了角度計算方法,并設計制作了角度傳感器.實驗表明,該角度傳感器結構簡單,測量重復性好,絕對誤差小于0.3°.
關鍵詞:角度傳感器;霍爾元件;嵌入式系統(tǒng);徑向磁鐵
目前角度傳感器主要有傳統(tǒng)的接觸式、光電式和磁電式3種形式.傳統(tǒng)的接觸式角度傳感器有應用廣泛的電位計式角位移傳感器,這種傳感器結構簡單,操作方便,價格低廉,性能穩(wěn)定,其原理是通過觸頭改變電阻實現(xiàn)的;但是這種傳感器極易磨損,長時間使用后會產生較大誤差,因此其測試性能不高,動態(tài)響應差,使用壽命短,需要經常檢驗其性能,更換頻繁,給使用方帶來極大不便[1].光電式角度傳感器種類繁多,有光柵式、激光式等各類光電器件結合的光電式角度傳感器,其中激光式角度傳感器測量精度高,工作可靠,成本較低,實用性較強;但是其結構復雜,體積較大,用到的光學儀器較多,對激光光線要求嚴格,對檢測對象也有特別的要求,因此其應用領域受限[2-3].其他光電式角度傳感器雖然測量比較精確,但大多對環(huán)境要求非常苛刻,抗振性差,安裝要求高,且價格昂貴,因此也不適合大量的普及使用[4-6].
磁電式角度傳感器測量精度高,成本低,安裝方便,便于維護和管理,使用壽命長,是當前角度傳感器發(fā)展的重要方向.磁電式角度傳感器有采用集成芯片的角度傳感器,但其所采用芯片多價格昂貴,且對外圍電路要求嚴格[7].本文所介紹的基于徑向充磁的霍爾式角度傳感器,利用線性霍爾元件及徑向磁鐵進行測量,通過嵌入式系統(tǒng)進行數(shù)據的采集與處理,結構簡單_,操作方便,價格低廉,克服了接觸式角度傳感器以及光電式角度傳感器的諸多缺點,是一種比較理想的角度傳感器.
1傳感器測量原理
沿半徑方向充磁的磁鐵稱徑向磁鐵.圖1是徑向圓柱形磁鐵立體示意圖,圖中矢量M表示磁場的磁化強度,方向如圖中箭頭的指向.
徑向磁鐵表面磁感應強度可用等效磁荷法計算得到,具體算法為:如圖1建立坐標系,以徑向充磁磁鐵體積中心點為原點,磁鐵軸線為z軸,磁化方向為y軸,N、S兩極半圓分界線為x軸建立坐標系,空間任意點磁場強度的z軸分量滿足以下關系[8-9]:

其中,M0為磁化強度,Ra為圓柱體端面半徑,za為圓柱體高的1/2.
圖2所示為徑向磁鐵的主視圖、側視圖及其磁感應線分布[10-12],沿徑向分開的兩個半圓分別是N、S磁極.在R≤Ra/2,且離端面距離δ≤0.5 mm的空間部分,可以近似認為磁力線分布是均勻的[7].

圖1徑向磁鐵坐標系建立示意圖Fig.1 Schematic diagram of the radial magnet coordinate system
考慮在距磁鐵徑向端面za的平面上,點P( x,y,za)以半徑R的同心圓繞z軸旋轉,在R≤Ra/2條件下,可應用公式( 1)計算點P的磁感應強度.如果重新建立柱坐標系(ρ,θ,h),P點繞z軸運動的同心圓軌跡上兩個坐標系關系為: x=Rsinθ,y=Rcosθ,z=za,R2=x2+y2.將其帶入式( 1),整理后可得到P點磁感應強度為

式中,M0為磁化強度,μ為磁導率,k是與P點運動半徑R、磁鐵高度za、磁鐵半徑Ra相關的系數(shù).
當徑向磁鐵表面P點以半徑R繞z軸旋轉一周時,其磁感應強度以正弦規(guī)律變化一個周期.反之,如果P點不動,徑向磁鐵繞z軸旋轉一周,其磁感應強度同樣變化一個正弦周期.由以上分析,假如在P點放置一個線性霍爾元件,則這個霍爾元件將會輸出一個呈正弦周期變化的電壓信號,根據此正弦電壓信號利用正弦反函數(shù)可求得徑向磁鐵旋轉的角度,由此即可實現(xiàn)角度測量.反正弦函數(shù)α=arcsin u的值域為[-90°,90°],故一個霍爾元件只能求得[-90°,90°]范圍內的角度,無法實現(xiàn)[0,360°)范圍內的角度測量,因此為了實現(xiàn)[0,360°)范圍的測量,至少需要2個相互垂直的霍爾元件進行測量.
為了更精確地進行全范圍角度的測量,將4個霍爾元件( U1~U4)在磁鐵正下方( R≤Ra/2)的任一圓周上相隔90°安裝如圖3( a),且4個霍爾元件與磁鐵端面距離小于0.5 mm,因此霍爾元件可感應磁鐵均勻的按正弦變化的磁場.搭建實驗裝置對4個霍爾元件進行測試,發(fā)現(xiàn)其輸出波形如圖3( b)所示.這里所用霍爾元件選用型號AH49E的線性霍爾元件,這種霍爾元件線性度好,功耗低,靈敏度高,輸出電阻小,溫度穩(wěn)定性好,壽命長,且價格低廉,適合測量磁場強度,因此可以滿足角度測量.
圖中U1、U2、U3、U4存在直流分量,是線性霍爾器件的直流偏置,經過隔直處理,U1、U2、U3、U4表達式如下:

其中K是一個與徑向磁鐵、霍爾元件、運動半徑和高度相關的常數(shù).

圖2徑向磁鐵及磁感應線分布[10-12]Fig.2 The radial magnet and its magnetic flux line[10-12]
通過式( 4)結合反正弦函數(shù)即可解出角度.
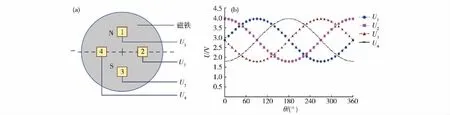
圖3相隔90°安裝的霍爾器件( a)及其輸出電壓波形( b)Fig.3 90°apart-installed Holzer components ( a) and their output voltage waveform ( b)
2傳感器設計及角度計算
傳感器硬件部分主要由信號采集模塊、CPU模塊、液晶顯示模塊和電源模塊組成.信號采集模塊將采集霍爾元件輸出的電壓信號,此信號經AD轉換將數(shù)據送至CPU模塊; CPU模塊利用嵌入式系統(tǒng)[13]對AD轉換的數(shù)據進行處理,最后將得到的角度值送至液晶顯示模塊顯示;液晶顯示模塊利用1602LCD(液晶顯示器)顯示屏顯示;電源模塊為整個系統(tǒng)供電.
圖4是傳感器結構圖及實物圖,徑向磁鐵安裝在旋轉軸下方靠近電路板處,4個霍爾元件安裝在徑向磁鐵的正下方,磁鐵與霍爾元件相對位置關系如圖3 ( a)所示.旋轉軸旋轉時,霍爾元件拾取徑向磁鐵相對位置的變化,經電路處理,由接線插頭輸出相應電壓Us、Uc.
根據式( 4),調用C語言自帶的反正弦函數(shù)以求得角度θ.由于正弦函數(shù)是多值函數(shù),計算時需確定所在象限,實際應用時可通過Us、Uc的正負來確定θ所在象限,確定了具體象限后就可根據所在象限將多值函數(shù)變?yōu)閱沃岛瘮?shù).計算過程如下:令α=arcsin us,此處us=Us/2K,如果Us>0且Uc>0,則所求角度θ在第一象限,即θ=α;如果Us>0且Uc<0,則所求角度θ在第二象限,即θ= 180°-α;如果Us<0且Uc<0,則所求角度θ在第三象限,即θ= 180°-α;如果Us<0且Uc>0,則所求角度θ在第四象限,即θ= 360°+α.計算流程圖如圖5所示.
3實驗結果
為驗證所設計傳感器的精度及重復性,將一個角度刻度盤安裝在傳感器上,用于測量傳感器旋轉軸旋轉角度,如圖6所示.傳感器輸出經A/D變換后送入嵌入式系統(tǒng),嵌入式系統(tǒng)利用傳感器送入的數(shù)據根據圖5流程計算出測到的角度值,最后將角度值通過LCD顯示屏顯示.

圖4徑向磁鐵霍爾角度傳感器結構圖( a)及實物圖( b)Fig.4 The angle sensor's structure diagram ( a) and physical diagram ( b)
徑向磁鐵的N、S兩極分界線處磁感應強度為0,當磁鐵旋轉至此位置時傳感器應輸出角度0°或180°,因此為消除系統(tǒng)誤差,和徑向磁鐵安裝在一起的指針在固定時應該與N、S兩極的分界線共線,這樣才可保證角度刻度盤的0°正好對應傳感器的零位角度,角度刻度盤與固定指針的徑向磁鐵的位置如圖7所示.

圖5徑向磁鐵霍爾角度傳感器角度計算流程圖Fig.5 The angle sensor's angle measuring flow chart

圖6實驗測試方案示意圖Fig.6 The diagram of the test scheme
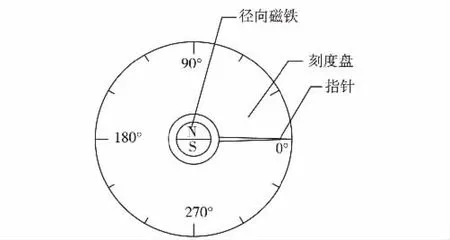
圖7固定指針的徑向磁鐵及刻度盤Fig.7 The radial magnet fixed a pointer and the dial
角度傳感器做成后,進行實驗測試,實驗測試過程如下:將旋轉軸沿逆時針方向轉動,每隔10°記錄下刻度盤顯示的實際角度值A和傳感器輸出信號經計算后得到的角度值A1.為了考察傳感器的重復性,以同樣的方法測量5次,圖8為測試結果( A1~A5).圖中可看到: 1)實際角度值A與傳感器輸出信號計算后得到的角度值重合度好、線性好,表明傳感器輸出信號能夠正確反映實際角度變化; 2)各次測量結構的重合度好,表明傳感器重復性好.

圖8傳感器測試結果Fig.8 Diagram of the sensor's test results
為了進一步考察傳感器的測量精度,定義絕對誤差Ea= |Ai-A|,i= 1,2,…,5,圖9是絕對誤差分析結果,由圖可知: 1)絕對誤差均小于0.3°,測量誤差小; 2)各次測量過程測量誤差分布呈現(xiàn)隨機特性,不存在某個區(qū)間誤差特別大或者特別小的現(xiàn)象,表明傳感器不存在結構上的測量誤差誘因; 3)誤差分布均勻,即小角度區(qū)間的測量誤差與大角度區(qū)間的測量絕對誤差是一樣的,因此小角度區(qū)間的測量相對誤差要大于大角度區(qū)間的測量相對誤差,這個特點表明這種類型的傳感器更適合于測量角度相對大的測量領域.

圖9傳感器測試結果誤差示意圖Fig.9 Error diagram of the sensor's test results
通過以上分析可看出,角度傳感器測量值與實際值還是有一定的誤差,引起這些誤差的原因有很多,但主要原因是:霍爾元件安裝偏差,沒有準確將霍爾元件安裝在磁鐵正下方的圓周上;在旋轉磁鐵的過程中,出現(xiàn)手抖動以及視線偏移的情況.
4結論
本文介紹的基于徑向充磁的霍爾式角度傳感器具有結構簡單,安裝方便,成本低廉,測量精度高,穩(wěn)定性好等優(yōu)點.這種角度傳感器克服了接觸式角度傳感器容易磨損的缺點,也沒有光電式角度傳感器對環(huán)境等要求高.實際使用中,這種角度傳感器可利用嵌入式系統(tǒng)控制及進行角度計算;嵌入式系統(tǒng)在C語言編程上可以直接調用反正弦函數(shù),靈活方便,克服了查表法、迭代法以及級數(shù)法等算法的步驟繁瑣復雜,而且需求資源多、耗費時間長等缺點.而且這種角度傳感器還可以進一步集成.因此可大幅度減小空間,節(jié)約資源,是一種比較理想的角度傳感器.
參考文獻:
[1]郭華玲,孟立凡,馮偉.電位計式角位移傳感器測試系統(tǒng)的動態(tài)性能研究[J].陜西科技大學學報,2010,28( 6) : 87-89.
[2]曹茂盛,劉兵.激光角度傳感器及其在風洞模型中的應用[J].儀器儀表學報,1996,17( 2) : 62-66.
[3]王啟東,陳純坤.激光動態(tài)角度測量系統(tǒng)研究[J].光子學報,1995,24( 1) : 68-71.
[4]鄧曉旭,苗瑞.光柵角度傳感器干涉計量原理[J].森林工程,2000,16( 4) : 30-31.
[5]范淑媛,熊永紅.分光計的數(shù)字化改造[J].實驗室研究與探索,2011,30( 9) : 234-236.
[6]余金棟.基于步進電機的角度測量及其在帆板控制系統(tǒng)中的應用[J].機電工程技術,2012,41( 7) : 129-132.
[7]趙允喜.電動助力轉向系統(tǒng)角度傳感器的研究[D].武漢:武漢理工大學,2012: 8-9.
[8]李景天,宋一得,鄭勤紅,等.用等效磁荷法計算永磁體磁場[J].云南師范大學學報,1999,19( 2) : 33-36.
[9]周耀忠,唐申生.任意形狀通電線圈磁場的計算[J].海軍工程大學學報,2009,21( 3) : 71-74.
[10]李曉陽,徐金偉,劉宏娟.矩形永磁體三維磁場空間分布[J].北京工業(yè)大學學報,2008,34( 1) : 1-5.
[11]王瑞凱,左洪福,呂萌.環(huán)形磁鐵空間磁場的解析計算與仿真[J].航空計算技術,2011,41( 5) : 19-23.
[12]劉宏娟.矩形永磁體三維磁場空間分布研究[D].北京:北京工業(yè)大學,2006.
[13]劉建清,孫保書,李鳳偉,等.輕松玩轉AVR單片機C語言[M].北京:北京航空航天大學出版社,2011: 307-318.
A New Type of Angle Sensor Based on Radial Magnetizing and Hall Elements
WANG Xinfeng,XU Binbin,DAI Liye,ZHANG Jinhui,CHEN Wenxiang
( School of Physics and Mechanical&Electrical Engineering,Xiamen University,Xiamen 361005,China)
Abstract:In this paper an angle sensor is designed to take advantage of a radial magnet whose magnetic flux density is assumed to be a Sine distribution along the magnet's radial-concentric circle.This paper analyzes the principle of angle measurement that is based on linear hall elements and radial magnetizing,offers the angle calculation method,and designs the angle sensor.Experiments illustrate that the angle sensor exhibits a simple structure and a good performance of repeatability,and the angle sensor's absolute error is less than 0.3°.
Key words:angle sensor; Holzer components; embedded system; radial magnets
*通信作者:wxchen@ 163.com
基金項目:福建省科技廳計劃項目( 2014H6026)
收稿日期:2015-03-12錄用日期: 2015-07-03
doi:10.6043/j.issn.0438-0479.2016.01.024
中圖分類號:TH 712
文獻標志碼:A
文章編號:0438-0479( 2016) 01-0126-05
引文格式:王新峰,許彬彬,戴立業(yè),等.一種基于徑向充磁的霍爾式新型角度傳感器[J].廈門大學學報(自然科學版),2016,55 ( 1) : 126-130.
Citation: WANG X F,XU B B,DAI L Y,et al.A new type of angle sensor based on radial magnetizing and hall elements[J].Journal of Xiamen University( Natural Science),2016,55( 1) : 126-130.( in Chinese)
