基于閉環自適應辨識的速度環PI參數自整定
2016-04-14 01:33:32王文格
中國機械工程 2016年5期
關鍵詞:永磁同步電機
張 鵬 王文格 付 霞 聶 挺
1. 湖南大學,長沙,410082 2. 中煙機械技術中心有限責任公司,上海,201206
?
基于閉環自適應辨識的速度環PI參數自整定
張鵬1王文格1付霞1聶挺2
1. 湖南大學,長沙,4100822. 中煙機械技術中心有限責任公司,上海,201206
摘要:針對永磁同步電機伺服系統速度環比例積分(PI)參數整定過程中需要反復調節、效率低等問題,提出了一種基于閉環自適應卡爾曼濾波(AKF)系統辨識的伺服系統速度環PI參數自整定方法。首先根據輸入信號激勵速度閉環系統,分析不同頻率激勵作用下閉環辨識序列的信噪比與實際輸出,然后引入AKF算法辨識閉環被控對象的離散模型,最后通過遺傳算法仿真搜索最優速度環PI參數。仿真與實驗結果表明:該算法能有效抑制量測噪聲等擾動對系統辨識精度的影響,辨識結果能夠反映實際系統的動態輸入輸出特性,優化后的速度環具有優良的響應性能和較高的精度,便于實際工業應用。
關鍵詞:永磁同步電機;自適應卡爾曼濾波;閉環系統辨識;遺傳算法;參數自整定
0引言
在現代工業尤其是高速高精的機械系統中,永磁同步電機(PMSM)得到了廣泛應用,其控制參數的好壞對交流伺服系統的動態性能有重要影響。傳統的Z-N法等PID整定方法需要準確了解被控對象的模型和參數,容易陷入局部最優[1];許多現代的智能自整定方法需要不斷根據伺服系統運行時每組PI控制參數的階躍輸入響應來搜索最優參數[2],整定時間長且電機易出故障。隨著控制理論的不斷發展,出現了一些采用遺傳算法[3]、比例增益調節法[4]、自適應同步參數辨識法[5]、卡爾曼濾波和Elman神經網絡結合法[6]等精確辨識PMSM的電阻、電感和慣量[7-8]等參數,進而整定系統比例積分(PI)控制參數的方法,但在線的高階矩陣求逆[9]需要進行大量的實時計算,對系統硬件要求較高[10],且一般工業系統大多是固定參數的PI控制器,因而限制了這些復雜算法的應用。
系統辨識是一種獲得伺服電機系統模型進而進行參數整定的有效途徑,模型的獲取一般通過開環辨識[1],但在實際中,集成化的工業對象一般不允許斷開反饋做開環控制實驗,且直接將開環模型應用于閉環系統也會因噪聲擾動而產生偏差[11]。目前,國內外已有許多學者在閉環辨識方面進行了深入研究。文獻[11]采用兩階段閉環辨識算法實現了閉環辨識,但需構造無噪聲污染的中間信號。文獻[12-13]在系統階躍響應的開閉環轉換上近似地求出了二階加時滯系統傳遞函數。文獻[14-15]分別采用最小二乘法和輔助變量法實現了對閉環系統的間接辨識,但都未針對具體的電機對象。文獻[16]通過正交投影迭代法辨識了直線伺服系統位置環被控對象的高階連續模型。文獻[17]采用自適應卡爾曼濾波算法實現了對無刷直流電機的系統辨識,但對于伺服系統來說仍然是開環情況下的辨識。
相對于開環辨識,系統的閉環辨識由于會產生較大的估計誤差,目前較少應用于伺服系統。本文在分析閉環辨識序列的基礎上,將自適應卡爾曼濾波算法應用于PMSM的閉環系統辨識,抑制由不同工況引起的輸出波動特性變化對系統辨識精度的影響,克服了直接通過伺服系統已知參數建模優化出的PI參數因驅動器和電機等內部結構不同而難以應用的問題。
1伺服系統閉環模型分析
根據某輕工機械的高速高精狀況,各主要軸系均采用PMSM替代傳統的齒輪傳動。為保證各軸的跟隨精度和相鄰軸的同步精度,對各軸的PI控制參數進行整定優化。
假設空間磁場呈正弦分布,忽略鐵心飽和,不計磁滯和渦流損耗的影響,PMSM為隱極式結構,并忽略齒槽轉矩和其他擾動力的影響,采用id=0的矢量控制策略,則PMSM的電壓方程為
(1)
式中,Ud、Uq、id、iq分別為d、q軸定子的電壓與電流分量;ω為轉子機械角速度;Ra、La分別為定子的電阻和等效電感。
PMSM轉矩方程為
(2)
(3)
式中,Te、Tl分別為電磁轉矩和負載轉矩;B為黏滯摩擦因數;Pn為極對數;ψf為永磁體磁鏈;J為轉動慣量。
根據伺服系統三環結構,電流環是內環,為保證系統穩定且帶寬較大,其閉環控制系統可等效為一階慣性環節,時間常數為Ti;速度環控制參數是伺服系統抑制波動、減少超調和振蕩、提高精度的關鍵環節,PMSM伺服系統速度環控制結構如圖1a所示。
對于圖1虛線框中的模型,簡化擾動部分的影響,將負載Tl及其他轉矩擾動等效為系統內部的擾動。當負載一定或變化較小時,電機控制電壓與轉速近似為線性關系[18],從而將虛線框中的整體近似為二階模型進行系統閉環辨識,等效的閉環系統結構見圖1b。其中,r(t)、y(t)為閉環系統的輸入和輸出信號,u(t)為被控對象的輸入,η(t)為系統的擾動,ξ(t)為不可測噪聲干擾,e(t)為誤差。由此可得
(4)
消去中間變量得
(5)
式(5)說明,不可測噪聲干擾ξ(t)通過反饋環節與控制輸入u(t)直接相關,導致許多算法用于閉環辨識時結果有偏[11]。進一步化簡可得
(6)
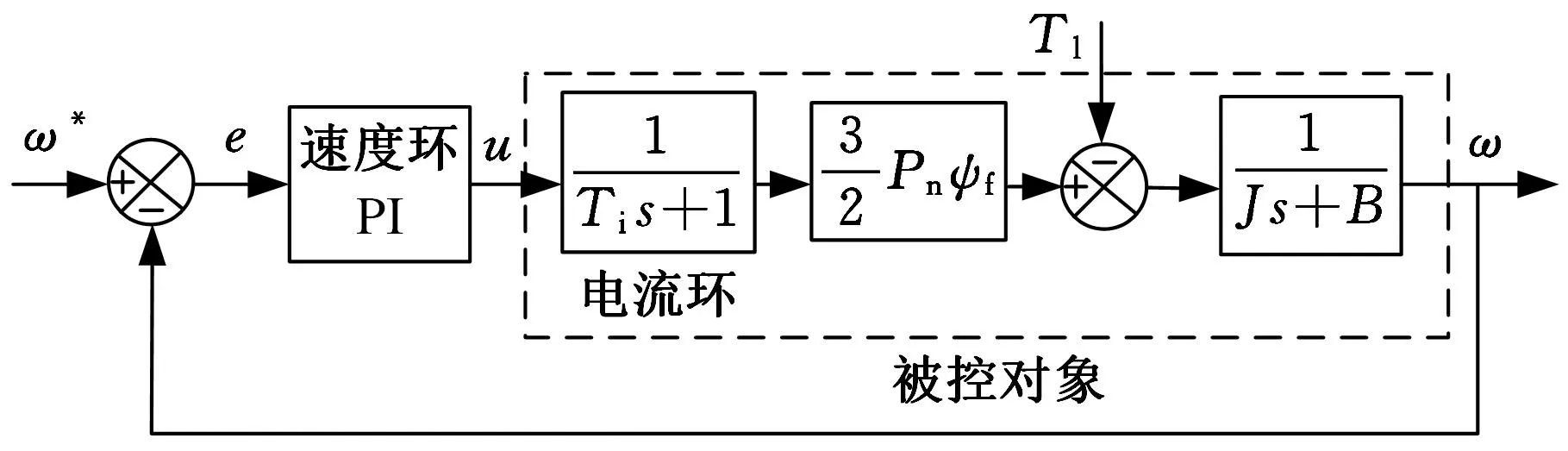
(a)速度環控制結構框圖
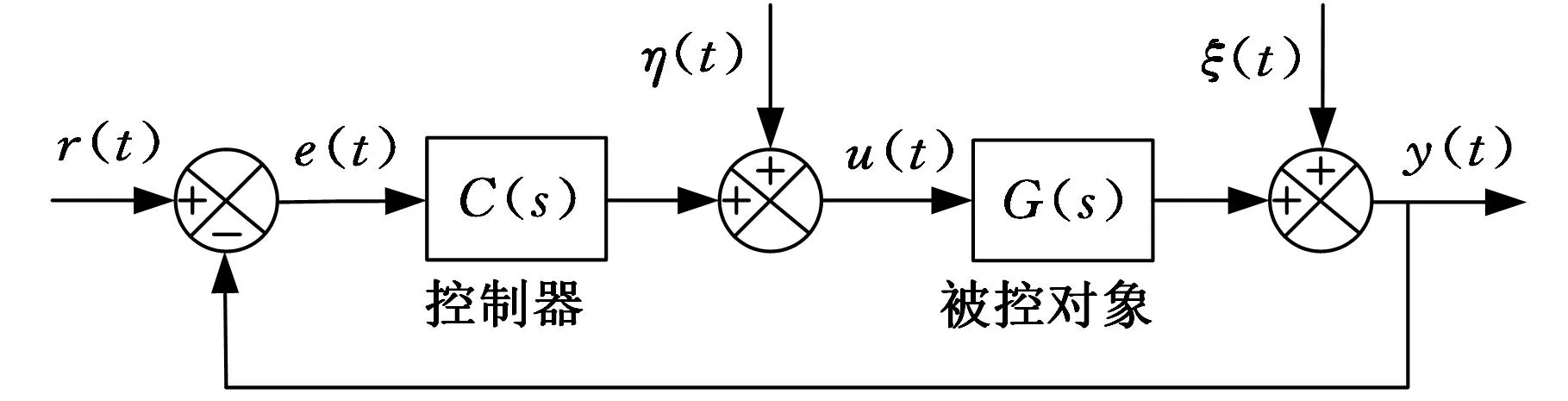
(b)閉環系統結構框圖圖1 速度環閉環控制結構框圖
從式(5)、式(6)可以看出,當閉環系統的輸入r(t)=0時,系統的擾動和不可測噪聲使閉環辨識所用的輸入u(t)和輸出y(t)產生不同幅值的噪聲干擾,且對于誤差e(t)而言不可忽略。一種可行的方法是增大閉環系統的輸入r(t),并使誤差e(t)以較大的速率改變,使系統的內部噪聲干擾對于辨識所用的輸入輸出信號而言可以忽略,同時對信號進行濾波辨識。但系統的變化需要一定的時間,且受采樣頻率影響,對閉環系統的輸入頻率有一定的限制,缺少開環辨識時所需各頻率成分,文獻[9]也指出速度環被控對象因存在積分環節而不能直接辨識,故基于固定頻率閉環辨識出的對象只是實際對象在中低頻段的一種輸入輸出擬合。
2閉環自適應系統辨識及整定
根據圖1,被控對象的傳遞函數為
(7)
離散化變換形式為
(8)
式中,a1、a2、b1、b2為被控對象待辨識參數。
考慮噪聲干擾的影響,伺服系統速度環被控對象的差分方程模型為
ω(k)=-a1ω(k-1)-a2ω(k-2)+
b1u(k-1)+b2u(k-2)+ξ(k)
(9)
定義數據向量φ(k)=(-ω(k-1),-ω(k-2),u(k-1),u(k-2)),參數向量θ=(a1,a2,b1,b2)T,則式(9)可改寫為
ω(k)=φ(k)θ+ξ(k)
(10)
式(10)是一種近似的線性關系,可看作卡爾曼濾波算法的測量方程,根據卡爾曼濾波算法可得
(11)
其中,K(k)為濾波增益矩陣,P(k)為濾波協方差矩陣,R(k)為量測噪聲干擾ξ(k)的理論方差。在系統辨識中,以被估參數向量θ作為狀態變量,則可得卡爾曼狀態更新方程為

(12)
(13)
式中,m為新息的開始計算點;n為計算的長度。
m點前采用常規卡爾曼算法,為減少計算并方便工程應用,Cv(k)簡寫為
(14)
注意到Cv(k)即為濾波增益矩陣K(k)中元素的分母,濾波增益K(k)可改寫成:
K(k)=P(k-1)φT(k)(Cv(k))-1
(15)
設定初值后,無需閉環系統速度輸出波動干擾R(k)的先驗知識,經過不斷地遞推運算,得到被控對象的模型參數θ,具體的計算循環過程依次為
(16)
采用實數編碼的遺傳算法對速度環PI控制參數通過仿真進行整定,這里選用偏差積分性能指標(ITAE)來計算系統的適應度函數,考慮到超調的影響,改進性能指標為
(17)

(18)

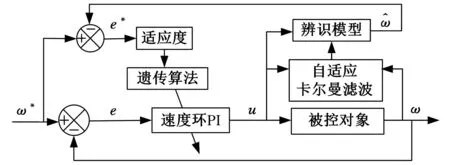
圖2 遺傳算法整定結構圖
3仿真與實驗分析
本文在西門子伺服驅動實驗平臺上對閉環辨識及速度環PI參數整定的有效性進行驗證,硬件平臺包括上位機、西門子SimotionD455控制器、西門子雙軸驅動器、科爾摩根CH044A系列永磁同步電機及某輕工機械實際工況下的負載等,如圖3所示。其中,上位機與控制器之間通過Ethernet總線來通信,用于數據采集和檢測,控制器與驅動器之間通過DRIVE-CLIQ總線通信,編碼器的反饋信號經SMC模塊轉換后傳輸到驅動器。軟件系統使用SimotionScout實現信號的輸入和采集,采集的數據經MATLAB/Simulink處理并優化整定出最優的速度環PI控制參數,再輸入實驗平臺進行驗證。
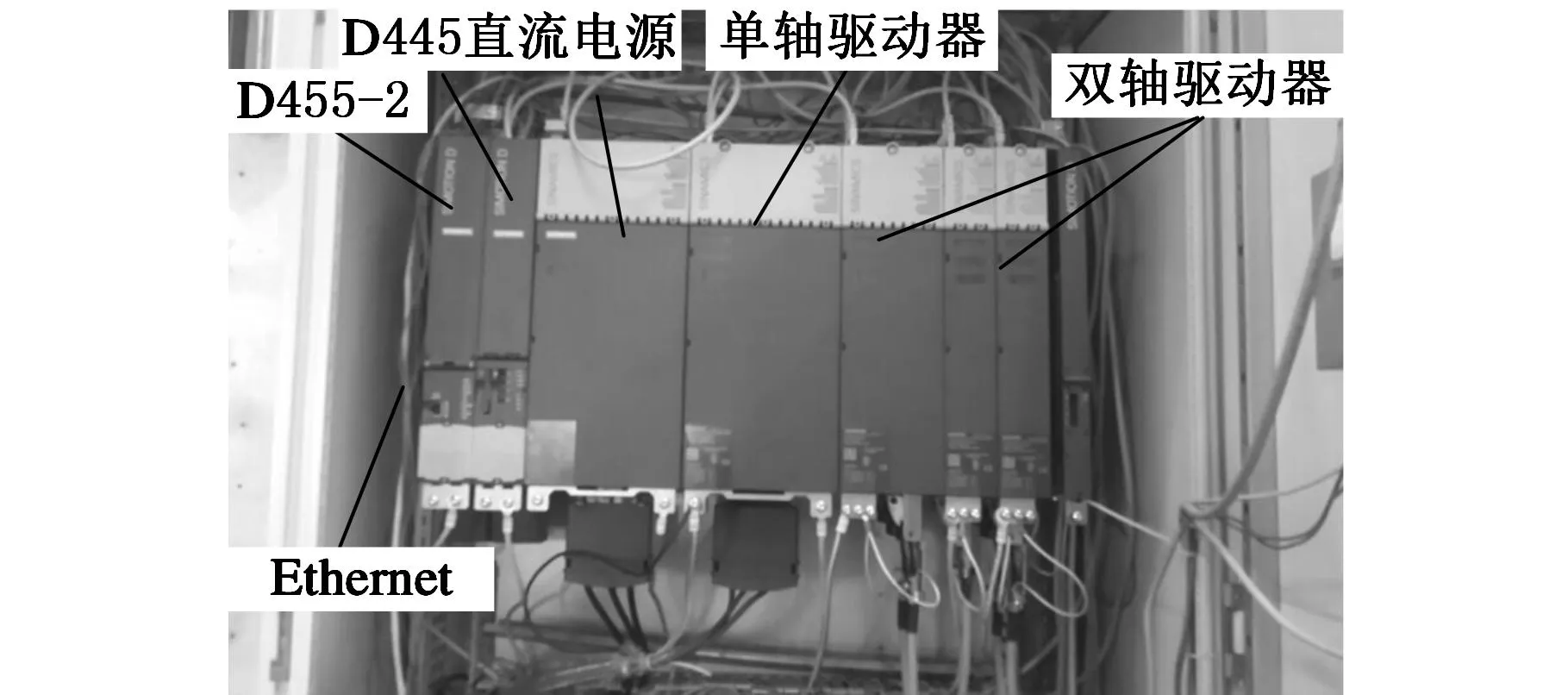
(a)控制柜電氣系統
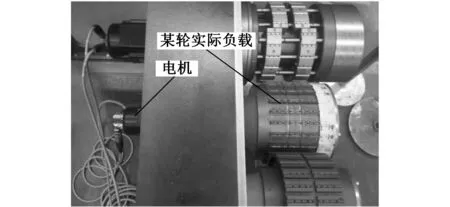
(b)機械系統圖3 實驗平臺

3.1空載條件下的閉環辨識整定
首先采用一組Simotion默認的速度環PI參數:比例參數P=0.009N·m·s/rad、積分參數I=10ms,經單位換算后得到速度環PI仿真參數分別為0.000 94、0.094,實驗采集被控對象的輸入輸出數據。為驗證閉環辨識的可行性,使用不同頻率的輸入信號激勵系統,實驗結果如表1所示。
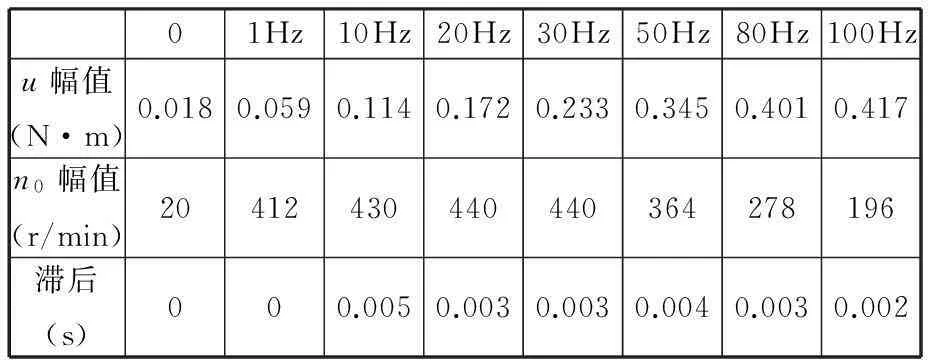
表1 幅值為400 r/min的不同頻率的輸入輸出特性
由表1可知,當速度環無輸入激勵時,被控對象輸入輸出隨機擾動的最大值分別為0.018 N·m和20 r/min;當速度環輸入幅值為400的不同頻率的正弦激勵時,隨著頻率的不斷增加,被控對象的輸入信號幅值不斷增大,輸出幅值由于諧振和頻率等因素影響先增大后減小,但都呈現出正弦變化規律,并疊加干擾。由圖4a可知,實際系統速度環的有效頻率在200 Hz以內,超出部分的伯德圖因劇烈振動而不穩定,考慮辨識序列的信噪比,若采用過小的輸入頻率,輸出轉矩的幅值與無輸入時的擾動最大值0.018相差不大,信號和干擾區分不明顯,如表1的部分速度實際幅值輸出因諧振超調而大于400 r/min的輸入。圖4b所示,20 Hz頻段、幅值為400的正弦波辨識結果比較接近實際系統在200 Hz頻段內的Bode圖模型,在仿真Bode圖上幅頻部分在0以上,則反映表1中在50 Hz內的速度幅值超調,而實驗Bode圖因采用隨機信號測得而未表現出來。頻率太小未能充分激勵系統,太大則受采樣頻率限制,均惡化辨識結果,減小帶寬。
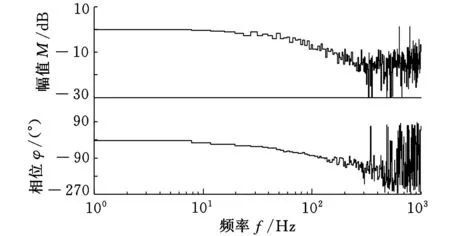
(a)伺服系統速度閉環實驗Bode圖
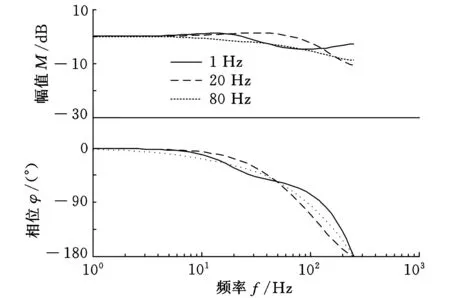
(b)辨識結果速度閉環仿真Bode圖圖4 速度閉環Bode圖
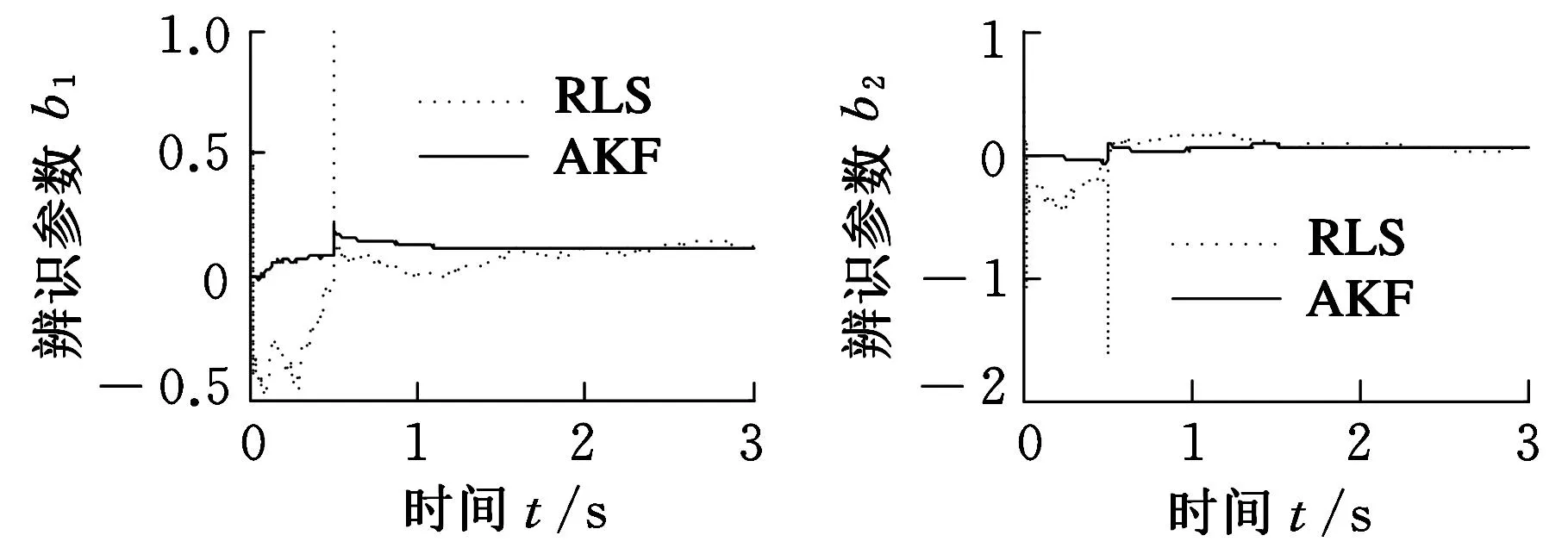
為了體現自適應卡爾曼濾波(AKF)算法抑制噪聲干擾的有效性,在相同的實驗數據條件下與工程中廣泛采用的因能避免數據飽和而用于參數在線實時估計的遞推最小二乘法(RLS)相比較,其辨識結果和辨識誤差如圖5所示,可見在電機未運行而處于噪聲擾動時,RLS算法的辨識結果受系統擾動影響較大,辨識參數不斷波動,AKF算法因帶有噪聲濾波而不受系統擾動的影響,辨識參數皆為零,且辨識最大誤差較最小二乘法減小了50%。AKF算法辨識得到的離散系統模型為

(a)AKF與RLS算法辨識結果
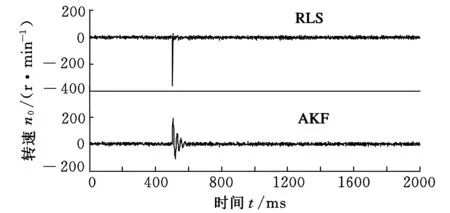
(b)AKF與RLS算法辨識誤差圖5 空載條件AKF與RLS算法辨識結果與誤差
設定遺傳算法速度環PI參數整定范圍分別為(0,0.09]和(0,100],通過幅值為400的階躍響應仿真搜索得到最優PI參數為:P=0.0105 N·m·s/rad,I=21.526 ms,整定前后仿真及實驗結果如圖6所示。
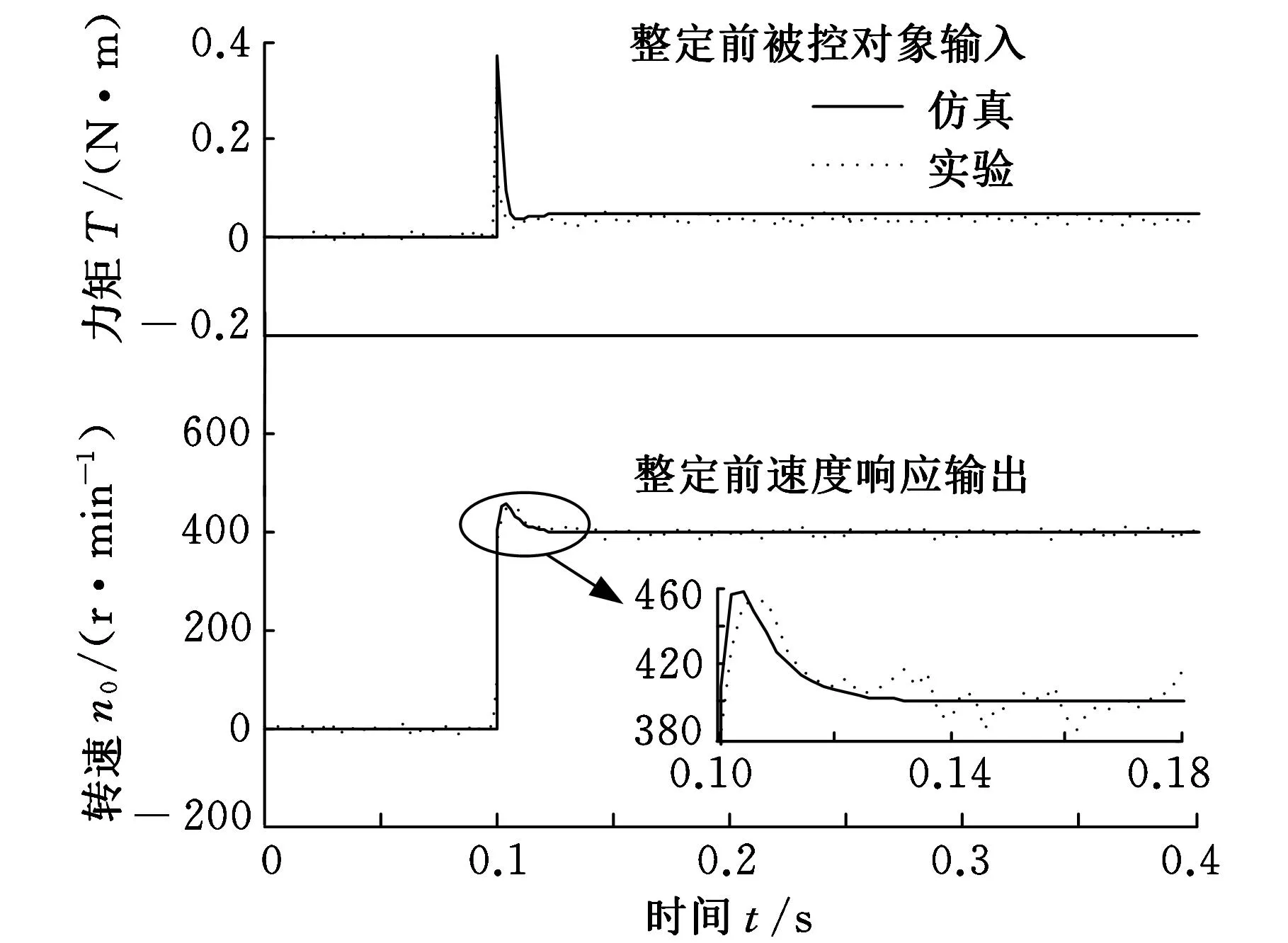
(a)整定前
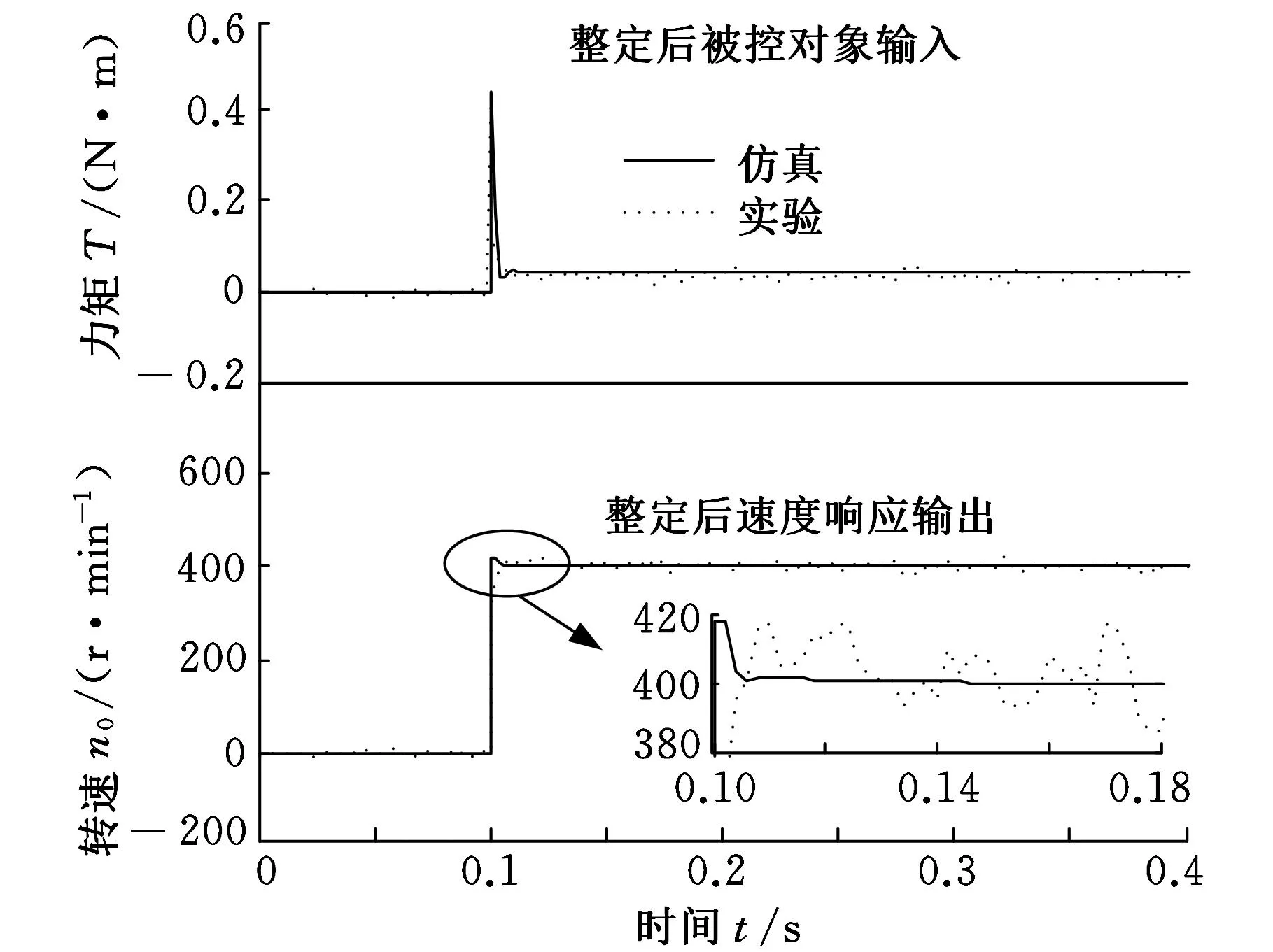
(b)整定后圖6 空載整定前后的輸入輸出
圖6說明,電機在0.1 s內未運行和穩定時的閉環速度輸出擾動幅值均為±20 r/min,AKF算法辨識的被控對象離散模型經仿真能夠較好地擬合實際伺服系統速度環的動態輸入輸出特性,整定前速度環超調約為54 r/min,整定后超調約為20 r/min,與空載無激勵情況下系統的擾動幅值相同。
3.2實際負載下的閉環辨識整定
為進一步驗證AKF辨識算法在實際工程應用中的可行性,實驗采集了輕工機械在實際負載工況運行過程中被控對象的輸入輸出數據。由于實際工況的限制,實際過程中速度環PI控制器的輸出轉矩有限幅,且伺服系統的正弦運行頻率一般不會很高,經反復實驗采用0.25 Hz幅值為400的正弦波辨識,其速度環PI的最大輸出轉矩接近限幅。實驗所用的速度環PI參數為Simotion提供的一組參考數據:P=10 N·m·s/rad,I=30 ms,速度環PI控制器的轉矩輸出限幅為±13.9026 N·m,速度閉環系統的辨識結果如圖7所示。

(a)辨識參數a1(b)辨識參數a2
(c)辨識參數b1(d)辨識參數b2圖7 實際負載下AKF與RLS算法辨識結果
由圖7可知,與空載情形相似,RLS算法在伺服系統未運行而處于系統噪聲擾動時辨識結果上下波動較大。此外,電機運行時RLS算法辨識結果有一定的波動,而AKF算法通過濾波過程使辨識的結果較平滑。電機在實際負載運行條件下AKF算法的辨識結果為
遺傳算法速度環PI參數的范圍分別設定為(0,100]和(0,200],通過仿真搜索得到最優PI參數為P=24.851N·m·s/rad,I=26.614ms,實際負載條件下整定前后的仿真及實驗結果如圖8所示。
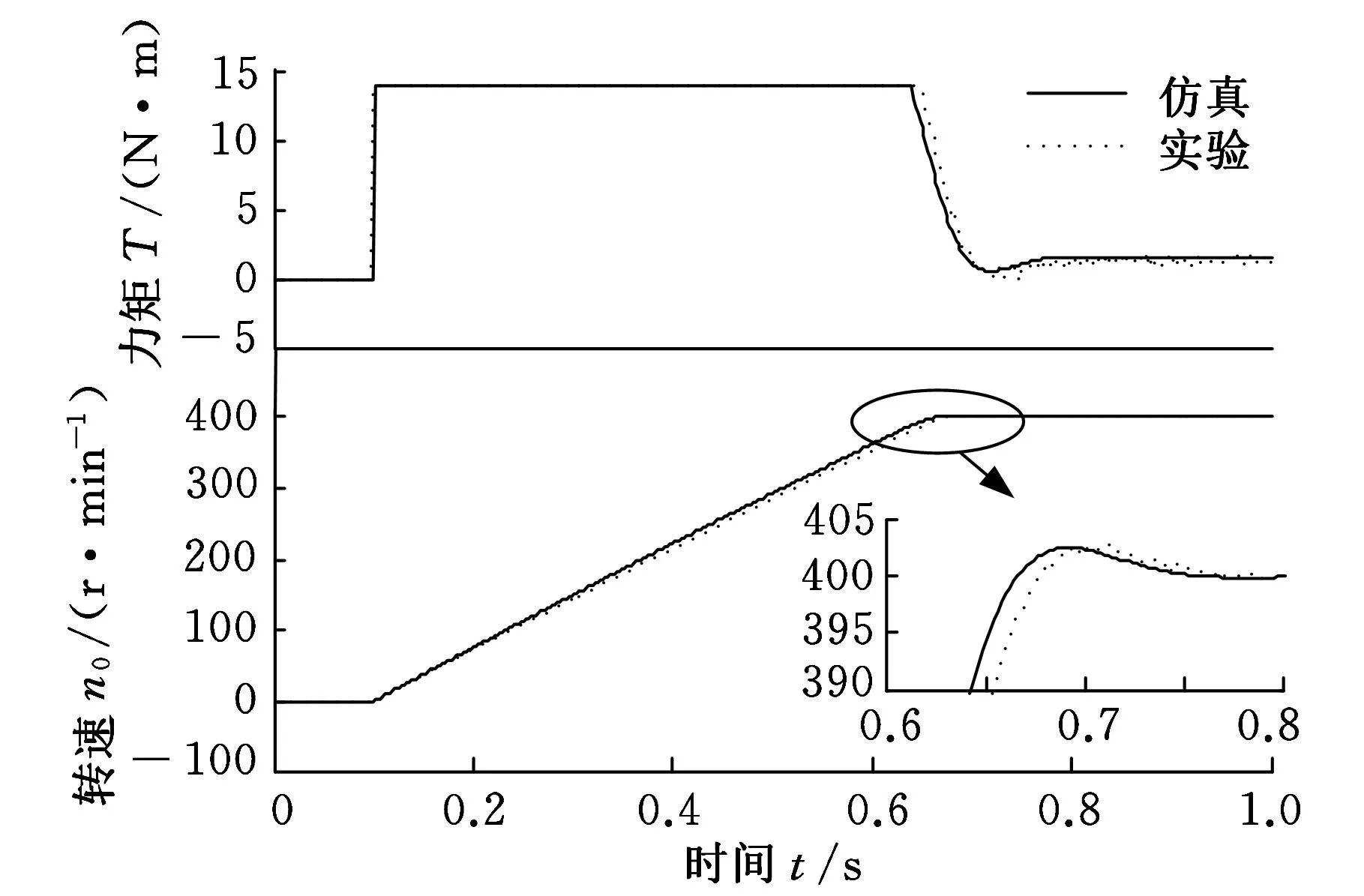
(a)整定前
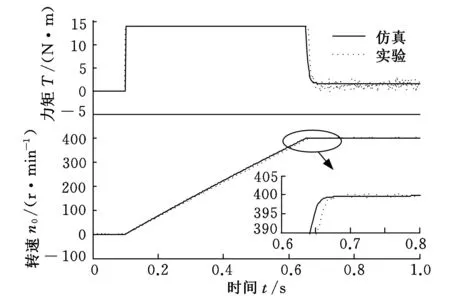
(b)整定后圖8 實際負載整定前后輸入(力矩)與輸出(轉速)
通過圖8可以看出,實際系統閉環辨識的離散模型經仿真能夠較好地擬合速度環實際系統的動態輸入輸出特性,但由于辨識模型的微小誤差,仿真曲線在最大轉矩輸出的速度上升階段存在較小的超前時間累積。電機在0.1 s內未運行時速度噪聲擾動幅值為0.01 r/min,速度環PI的電磁輸出轉矩在穩態時約為1.5 N·m,整定前后速度穩態誤差皆在±0.6 r/min以內,整定前電機超調約3 r/min,達到穩態時間約0.77 s,整定后超調約為0.6 r/min且響應較快,達到穩態時間約為0.72 s,整定后的伺服系統速度環性能得到了較大提高。
4結論
(1) 本文提出了一種新型實用的PMSM伺服系統速度環PI控制參數自整定方法,該方法針對伺服系統速度環的閉環模型,無需閉環系統速度輸出的噪聲擾動特性先驗知識和具體的伺服系統參數數值,通過閉環被控對象的辨識來仿真整定速度環PI參數,避免了在線整定過程中的反復調節和參數切換沖擊等問題。
(2)該自適應濾波辨識算法受不同負載和系統噪聲擾動的影響較小,辨識結果在中低頻段能較理想地擬合實際系統的動態輸入輸出特性,在仿真基礎上的速度環PI參數整定能夠有效地提高伺服系統的動態性能,減小超調量,便于在直接采用控制器驅動器的工業伺服系統中應用。
參考文獻:
[1]鄭世祺,唐小琦,盧少武,等.PMSM伺服系統參數自整定研究[J].電氣傳動,2013,43(3):10-13.
Zheng Shiqi, Tang Xiaoqi, Lu Shaowu, et al. Study on Parameters Auto-tuning of Servo System of PMSM[J]. Electric Drive, 2013, 43(3): 10-13.
[2]肖啟明,楊明,劉可述,等.PMSM伺服系統速度環PI控制器參數自整定及優化[J].電機與控制學報,2014,18(2):102-107.
Xiao Qiming, Yang Ming, Liu Keshu, et al. Parameters Self-tuning and Optimization of Speed PI Controller for PMSM Servo System[J]. Electric Machines and Control, 2014, 18(2): 102-107.
[3]Fung Rong-Fong,Hsu Yi-Lung,Huang Ming-Shyan.System Identification of a Dual-stage XY Precision Positioning Table[J].Precision Engineering,2009,33(1):71-88.
[4]Lee Seok-Beom.Closed-loop Estimation of Permanent Magnet Synchronous Motor Parameters by PI Controller Gain Tuning[J].IEEE Transactions on Energy Conversion,2006,21(4):863-870.
[5]Liu L,Cartes D A.Synchronisation Based Adaptive Parameter Identification for Permanent Magnet Synchronous Motors[J].IET Control Theory,2007,1(4):1015-1022.
[6]Wang Song,Shi Shuangshuang,Chen Chao,el al.Identification of PMSM Based on EKF and Elman Neural Network[C]//Proceeding of the IEEE International Conference on Automation and Logistics. Shenyang,2009:1459-1463.
[7]梁驕雁,胡育文,魯文其.永磁交流伺服系統的抗擾動自適應控制[J].電工技術學報,2011,26(10):174-180.
Liang Jiaoyan, Hu Yuweng, Lu Wenqi. Anti-disturbance Adaptive Control of Permanent Magnet AC Servo System[J]. Transactions of China Electrotechnical Society, 2011, 26(10): 174-180.
[8]魯文其,胡育文,梁驕雁,等.永磁同步電機伺服系統抗擾動自適應控制[J].中國電機工程學報,2011,31(3):75-81.
Lu Wenqi, Hu Yuwen, Liang Jiaoyan, et al. Anti-disturbance Adaptive Control for Permanent Magnet Synchronous Motor Servo System[J]. Proceeding of the CSEE, 2011, 31(3): 75-81.
[9]李長紅,陳明俊,楊燕,等.永磁同步電機的相關辨識法自整定速度控制[J].中國電機工程學報,2014,34(30):5360-5367.
Li Changhong, Chen Mingjun, Yang Yan, et al. A Correlation Identification Based Auto-Tuning Speed Control Method for Permanent Magnet Synchronous Motor Drives[J]. Proceeding of the CSEE, 2014, 34(30): 5360-5367.
[10]崔業兵,鄭健,鞠玉濤,等.舵機永磁無刷直流電機控制器參數離線整定[J].電工技術學報,2013,28(9):281-287.
Cui Yebing, Zheng Jian, Ju Yutao, et al. Off-line Controller Parameters Tuning for Electromechanical Actuator Systems with Permanent Magnet Brushless DC Motor Driving[J]. Transactions of China Electrotechnical Society, 2013, 28(9): 281-287.
[11]莫建林,王偉,許曉鳴,等.系統辨識中的閉環問題[J].控制理論與應用,2002,19(1):9-14.
Mo Jianlin, Wang Wei, Xu Xiaoming, et al. Closed-loop Problem in System Identification[J]. Control Theory and Applications, 2002, 19(1): 9-14.
[12]李大字,曾繁友,靳其兵.基于階躍響應和開閉環轉換的三步法辨識[J].儀器儀表學報,2009,30(6):30-33.
Li Dazi, Zeng Fanyou, Jin Qibing, et al. A Three-step Closed-loop Identification Method Based on Step Response and Open Loop Transformation[J]. Chinese Journal of Scientific Instrument, 2009, 30(6): 30-33.
[13]朱學峰,肖術駿,王秀.一種新的實用PI控制閉環辨識方法[J].控制理論與應用,2010,27(9):1240-1244.
Zhu Xuefeng, Xiao Shujun, Wang Xiu. A New Practical Method for Closed-loop Identification with PI Control[J]. Control Theory and Applications, 2010, 27(9): 1240-1244.
[14]Zheng Weixing.Parametric Identification of Linear Systems Operating under Feedback Control[J].IEEE Transactions on Circuits and Systems—I: Fundamental Theory and Applications,2001,48(4):451-458.
[15]Zheng Weixing.On Indirect Identification of Feedback-control Systems Via the Instrumental Variables Methods[J].IEEE Transactions on Circuits and Systems—I: Fundamental Theory and Applications,2003,50(9):1232-1238.
[16]楊亮亮,武曉虎,史偉民,等.基于正交投影迭代學習的高頻響閉環運動控制系統模型參數辨識研究[J].機械工程學報,2015,51(1):188-195.
Yang Liangliang, Wu Xiaohu, Shi Weimin, et al. Research on Model Parameters Identification of Closed-loop High Frequency Motion Control System Based on Iterative Learning of Orthogonal Projection[J]. Journal of Mechanical Engineering, 2015, 51(1): 188-195.
[17]魏彤,郭蕊.自適應卡爾曼濾波在無刷直流電機系統辨識中的應用[J].光學精密工程,2012,20(10):2308-2314.
Wei Tong, Guo Rui. Application of Adaptive Kalman Filtering to System Identification of Brushless DC Motor[J]. Optics and Precision Engineering, 2012, 20(10): 2308-2314.
[18]賈永峰,谷立臣.模型與條件PID補償的永磁伺服電動機驅動液壓源流量控制[J].機械工程學報,2014,50(8):197-204.
Jia Yongfeng, Gu Lichen. Model and Conditional PID Compensation Control on Flow of Hydraulic Source Drive by Permanent Magnet Servo Motor[J]. Journal of Mechanical Engineering, 2014, 50(8): 197-204.
[19]卞鴻巍,金志華,王俊璞,等.組合導航系統新息自適應卡爾曼濾波算法[J].上海交通大學學報,2006,40(6):1000-1003.
Bian Hongwei, Jin Zhihua, Wang Junpu, et al. The Innovation Based Estimation Adaptive Kalman Filter Algorithm for INS/GPS Integrated Navigation System[J]. Journal of Shanghai Jiaotong University, 2006, 40(6): 1000-1003.
[20]楊長林,柏秀亮,劉廷飛,等.新息自適應區間Kalman濾波算法及其應用[J].傳感器與微系統,2012,31(11):132-135.
Yang Changlin, Bai Xiuliang, Liu Yanfei, et al. Innovation-based Adaptive Interval Kalman Filtering Algorithm and Its Application[J]. Transducer and Microsystem Technologies, 2012, 31(11): 132-135.
(編輯袁興玲)
Speed PI Parameter Auto-tuning Based on Closed-loop Adaptive Identification
Zhang Peng1Wang Wenge1Fu Xia1Nie Ting2
1.Hunan University,Changsha,410082
2.Tobacco Machinery Co., Ltd. Technology Center,Shanghai,201206
Abstract:In order to solve the problems of speed PI parameter tuning process needed to be adjusted repeatedly or had low efficiency for PMSM servo system, a practical method of speed PI parameter auto-tuning was proposed based on the closed-loop AKF system identification. Though speed closed-loop input excitation, the signal-to-noise ratio and actual output of closed-loop identification sequence under different frequencies were analyzed, then the discrete model of closed-loop controlled objects was identified by AKF algorithm, and finally by genetic algorithm the optimal speed PI parameters were searched through simulation. Simulation and experimental results show that the presented algorithm can effectively suppress the influences of the measurement noise disturbances on system identification accuracy, and the recognition result can reflect the dynamic input-output characteristics of the actual system, moreover, excellent response and high accuracy have appeared after speed optimization and it is convenient to the practical industrial applications.
Key words:permanent magnet synchronous motor(PMSM); adaptive Kalman filter(AKF); closed-loop system identification; genetic algorithm; parameter auto-tuning
作者簡介:張鵬,男,1989年生。湖南大學機械與運載工程學院碩士研究生。主要研究方向為機電一體化、伺服系統控制與仿真。王文格,男,1966年生。湖南大學機械與運載工程學院教授。付霞,女,1989年生。湖南大學機械與運載工程學院碩士研究生。聶挺,男,1987年生。中煙機械技術中心有限責任公司工程師。
中圖分類號:TM351;TP273
DOI:10.3969/j.issn.1004-132X.2016.05.012
基金項目:國家自然科學基金資助項目(51075137)
收稿日期:2015-03-23
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
