道路管道施工輔助機器人設計及控制
2016-04-21 17:14:05劉曉??
筑路機械與施工機械化 2016年4期
關鍵詞:電氣控制
劉曉??


摘要:基于實際需求設計了一種道路管道施工輔助機器人,用于非開挖鋪設管道施工。首先依據挖掘機器人要求,以串聯構型為參考,提出了一種適用于非開挖機器人的新構型;基于構型設計了機器人系統各主要構件,包括切削刀頭、螺旋輸送裝置、滾珠絲杠等,并利用Adams軟件進行虛擬樣機仿真;最后,研究機器人系統的電氣控制部分,搭建了主/控電路,并利用PLC編制了相應的控制程序。
關鍵詞:非開挖;道路管道施工;機器人;電氣控制
中圖分類號:U416.02 文獻標志碼:B
Abstract: A kind of auxiliary robot was designed for road pipeline construction based on practical needs. According to the requirements of excavation robot, a new configuration for trenchless construction was put forward based on serial robot. Main components of the robot system were designed, including cutting cutter, screw conveyer and ball screw. The virtual prototype simulation was conducted by ADAMS. The electrical control part of the robot system was researched, and the main/control circuit was set, and corresponding control program was compiled based on PLC.
Key words: trenchless; road pipeline construction; robot; electrical control
0 引 言
機器人技術是一門迅速發展起來的新學科,它在科技領域和生產生活中得到了廣泛應用,使傳統的生產發生變革,對人類社會產生深遠的意義。隨著中國人民生活水平的提高、環境保護力度的加大,傳統的開挖鋪設管道越來越不適應現代化建設的需求,非開挖鋪設管道正得到各方面的大力支持,如何將機器人技術應用到非開挖工程管道施工中,成為國內外研究人員十分關注的課題。
非開挖鋪設地下管線有頂管法、定向鉆進和導向鉆進法、微型隧道施工法、夯管施工法、水平螺旋鉆進法以及沖擊矛鋪管技術等十幾種方法[1-2]。1896年美國北太平洋鐵路鋪設工程的頂管法是最早使用的非開挖施工方法,1967年美國Schamm公司生產了第一臺沖擊式微型頂管機,1975年日本推出第一臺微型隧道鋪設設備[3],推動了該技術在國外的廣泛應用。隨著1953年北京的人工手掘式頂管出現,國內開始使用這項技術,但設備相當簡陋。20世紀80年代中后期,隨著工程的增多及需求的增大,中國引進并開發了不少機械式非開挖鋪管設備,但是在施工裝備設計和制造工藝上,中國仍處于較落后的狀態,一些大型的非開挖管道鋪設工程仍然需要引進國外設備[4]。
到目前為止,國內外還沒有開發出這樣一種設備,能夠將工業機器人同非開挖鋪設管道緊密結合起來,通過遙控和自動控制技術的結合進行道路管道鋪設。
本文介紹一種新型道路管道施工輔助機器人,用于城市非開挖鋪設管道施工。首先依據挖掘機器人的要求,提出一種適用于非開挖機器人的新構型。基于這種新構型設計機器人系統中的主要構件,例如切削刀頭、螺旋輸送裝置、滾珠絲杠等。對選取的零部件進行造型,并利用ADAMS進行虛擬樣機仿真。最后,設計設備的控制系統,并利用PLC編制相應的控制程序。
1 機器人綜合構型
根據實際工況,要使設計的機器人能夠按照預先設計的程序實現給定的運動,整個機構需滿足以下要求。
(1)所需精度低。機構的主要作用是挖掘土壤,預鋪設的管道直徑是0.8~1.6 m,所以機構不需要很高的工作精度。
(2)所占空間較小。由于整個機車在地面以下進行切削工作,所以只有當機車的體積小于切削刀具的體積時,才能使整個機車工作。
(3)負荷較小。機構的負荷由自身的重量和工作負載組成,而切削土壤所需的工作負荷比較小。
(4)工程造價低。機車用于一般的工程機械,主要是非開挖鋪設管道,它的工程造價同開挖鋪設比相差不大,這樣才能體現出本機構的優點并得到廣泛的應用。
根據串、并聯結構的優缺點以及要設計的機構特點,選擇串聯機構較為合適,理由如下:串聯機構就能保證工程機械施工所需的較低精度;負載是切削土壤的阻力,比較小,不需要并聯機構的高負載能力;本機械用于一般的工程施工,為了能夠得到廣泛應用,造價不能太高,故選用空間桿系串聯機構。該機構桿件末端基點具有3個自由度,通過改變桿件長度、繞基點轉動和沿基點移動3種方式來加以實現[5]。通過以上3種基本運動形式就能夠設計初步模型,下面給出2種設計方案。
1.1 方案一
圖1是對方案一的描述。機構由3個部分組成,平板是整個機構的載體,行走裝置安裝于它的下方;與平板連接的桿件起固定手臂的作用,它與平板組成轉動副;手臂的一端與桿件組成轉動副,另一端是用來安裝切削刀具的。這樣的機構在工作時,行走部分將機車運輸到指定位置后,手臂末端的刀具開始切削土壤,通過2個轉動副的相互轉動,刀具可以做圓周運動,這樣用較小的刀具就能夠切削出很大的孔,而且機車的體積不受刀具影響。
1.2 方案二
圖2是對方案二的描述,機構由4個部分組成,底板是整個機構的載體,下方安裝行走裝置;與底板連接的是桿件1,與方案一不同的是,它們之間不是轉動副而是固定的;桿件2與桿件1通過轉動副連接;手臂末端與桿件2組成移動副,另一端安裝切削刀具。機構工作時,機車到達工作區域后停止行走,刀頭轉動并通過移動副向前切削土壤,移動一段距離后返回到初始位置,然后機車再向前一段距離,刀頭繼續工作,如此反復。這個機構是直接工作的,所以刀頭只能挖掘一種尺寸的孔,機車的體積也受到刀具體積的限制。
比較上述2個方案,本次設計選用方案二的串聯機構,理由如下。
(1)切削工作時,方案一是機車一邊行走,刀頭一邊切削土壤,這樣定位比較困難;而方案二是機車停止后通過移動副向前工作。
(2)方案一中刀頭體積不限制機車的體積,刀頭通過2個轉動副繞曲線轉動,但控制起來比較困難;而方案二的刀頭只繞自身轉動,控制比較方便,同時這使機車的體積受到限制。
(3)由于方案一必須控制2個轉動副轉動才能使切削刀頭按指定的軌跡切削土壤,這樣控制起來比較困難;而方案二需要控制的只有移動副的伸縮,比較簡單。
綜上所述,選用方案二的串聯機構作為本次設計的機構。
2 機器人機械部分設計
2.1 切削刀頭
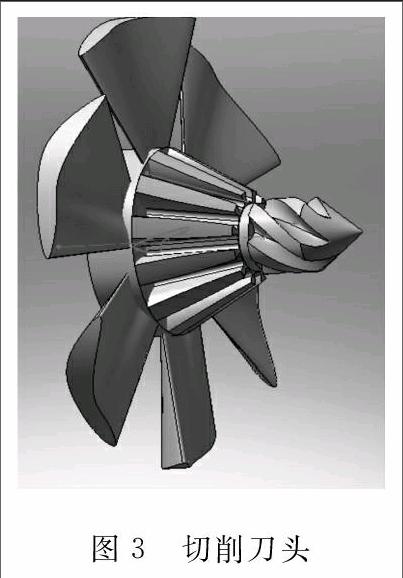
首先,設計要求鋪設管道的直徑為0.8~1.6 m,相對較大,所需要的刀頭也較大,故不能采用一體設計。根據實際要求,將切削刀頭分為3個部分(圖3):第一部分是鉆孔部分,主要用來引導刀頭前進;第二部分主要起過渡和擴孔的作用;第三部分是切削主體部分。
第一部分是在參考鉆頭結構的基礎上設計的,在切削土壤時,主要用來定位、鉆孔,使得后面的切削刀頭部分能夠正常工作,由于重量、體積等限制,這部分體積應較小。
第二部分是設計類似錐齒輪,主要是連接刀頭的前后2個部分,起過渡作用,同時,在第一部分鉆孔的基礎上,對孔進行擴大。
第三部分是挖掘部分,切削葉片主要的作用是對土壤進行切削,它的結構類似葉輪葉片,由于葉片的形狀特殊,整個葉片逐漸進入土壤中,這樣可以避免刀頭受到很大的切削阻力,同時,切削下來的土壤不會滯留在葉片上,減少一部分切削阻力。
2.2 螺旋輸土裝置
機車底部的輸送土壤裝置仿照造紙工業中的螺旋輸送機,如圖4所示。該結構由裝有螺旋葉片的轉軸和料槽組成,通過軸承將轉軸裝在機車底板的軸承座上,轉軸由電機驅動。其工作原理是:土料從進料口進入,隨著轉軸旋轉,土料受到來自葉片的法向推力,土料在葉片法向推力的軸向分力作用下,沿著料槽軸向移動[6]。
2.3 驅動電機
設備需要3個電機,分別用來驅動螺旋裝置、切削葉片的轉動以及與滾珠絲杠相連的移動板的移動。在機車工作時,這3個電機的相互運動規律較簡單,所以采用異步電機作驅動源。初步選取Y系列(IP44)三相異步電機。IP44類電機為封閉自扇冷式鼠輪型三相異步電動機,與其他系列相比有效率高、節能、堵轉轉矩高、噪音低、震動小、運動安全可靠等優點,還能防止鐵屑或其他雜物侵入電機內部;更重要的一點是,IP44類電機除了具有與Y系列(IP23)相同的用途外,還適用于灰塵多、水土飛濺的場所,如球磨機、碾米機、磨粉機、脫谷機及其他農業機械、食品機械、礦山機械等。
2.4 傳動連接部分
本次設計中,電機與切削葉片之間采用齒輪傳動,在起減速作用的同時,減小了電動機承受的挖掘阻力矩,又因為挖掘軸向力由滾珠絲杠承受,所以采用直齒圓柱齒輪。
采用滾珠絲杠傳動實現移動板與導軌之間的相對移動。滾珠絲杠副是由絲杠、螺母、滾珠等零件組成的機械元件,其作用是將電動機的旋轉運動變為移動板的直線運動,以達到機車工作所需要的運動形式。絲杠的一端與電機相連接,位置是固定的;另一端在移動板上,位置是變化的。故將滾珠絲杠的支撐選擇為一端固定一端自由,其固定端采用2個角接觸軸承支撐。
用軸來支撐回轉零件,傳遞轉矩和運動。在一般情況下,軸的工作能力取決于它的強度和剛度,對于高轉速軸,有時還取決于它的震動穩定性。設計軸時,在按上述要求進行設計計算或校核計算的基礎上,結構還要滿足運轉維護要求、特殊處理要求等。
3 虛擬樣機仿真
在設計階段,采用虛擬樣機技術可以使生產的產品滿足要求,并有效地縮短開發周期,提高開發效率,節省開發費用。本文采用ADAMS軟件建立運動和動力學模型,進行虛擬樣機仿真。
ADAMS具有很強的運動和動力學仿真能力,但它建模的能力相對比較弱,所以本次設計中,用Solidworks對形狀復雜的零件進行建模,然后導入ADAMS中,建立簡單的模型并添加一定的約束和動力仿真。將上面的零件導入ADAMS中,設定零件材料,找到零件重心,利用ADAMS的建模能力,在這些零件的基礎上,建立軸、軸承、軸承座、移動板等模型,再將這些零件裝配起來[7]。
本管道施工輔助機器人由多個構件組成,且它們之間存在約束關系,即通常所說的運動副或鉸鏈。為了模擬其運動情況,需要在構件間定義運動副的同時,在構件之間和運動副上添加載荷,并在運動副上加以驅動,以使機構可以模擬仿真運動。
考慮機車實際工作中各構件的運動關系,將其抽象為各種運動副,并在零件上定義這些約束副,在轉動副處添加旋轉驅動,建立仿真模型,如圖5所示。
通過仿真可以看出,機構沒有發生運動干涉,所以預先設計的各個零件在機車運動過程中不發生運動學干涉。
4 電氣部分設計
前面已經選擇了電機的型號,本節主要介紹控制三相異步電動機的電路,電路擬采用PLC控制。設計中機車需要完成的運動過程如下。
(1)閉合開機開關,螺旋排土裝置運行。
(2)機車由靜止開始運動0.3 m后停止。
(3)切削葉片開始轉動。
(4)葉片轉動3 s后,滾珠絲杠開始轉動移動板向前運動3 min(0.3 m)。
(5)移動板快退回到初始位置,這個過程用時10 s。
(6)切削葉片停止轉動。這是機車工作的第一個循環過程,然后繼續重復(2)~(6)的步驟。
以上每個運動過程都是電動機的轉動引起的,所以通過設計電路控制電動機的轉動就能夠得到所需的運動。采用軟、硬件結合組成控制電路,主/控電路分別如圖6、7所示。
4.1 主電路圖的設計
主電路圖由以下6個部分組成。
(1)機車行走分支。從三相線出來通過繼電器KM1的常開觸點連接到電機1上,觸點的開閉控制電機轉動與否,從而控制機車的啟停,繼電器KM1在控制電路中連接。
(2)刀頭轉動分支。由于電機的轉速比較快,依靠一級齒輪減速很困難,所以采用變頻調速,利用變頻器的作用使電機降低到理想的轉速,同樣通過KM2常開觸點的斷開和閉合控制電機2的轉停,從而控制切削葉片的轉停。
(3)導軌移動分支。移動板在滾珠絲杠的作用下前后移動,切削土壤時移動板以較慢的速度向前移動,相反,切削完畢后移動板以較快的速度返回到初始的位置。這一過程由一個電動機控制,將三相中的任意兩相對換就能夠使電機的轉向發生變化,所以繼電器KM3、KM4 的2個常開觸點的斷開和閉合就能控制電動機的正反轉。因為移動板前后移動速度不一樣,所以應連接2個不同的變頻器實現電機正、反轉的不同轉速。
(4)螺旋排土分支。螺旋排土裝置主要是利用電動機的轉動帶動螺旋葉片的轉動,從而將切削下來的土壤排到機車的后面,它的控制原理同刀頭轉動分支的控制。
(5)交直流轉化電路。由于控制電路選用PLC的電源電壓是直流24 V,為了使供電方便,設計這樣的電路能夠將三相線的交流380 V轉化為直流24 V。
(6)指示燈。每個指示燈通過對應繼電器的常開觸點連接到電路中,以表示每個動作的執行與否。指示燈之間是并聯的,互不影響,它們分別指示的內容為:電源供電與否、機車前進與停止、刀頭轉動、導軌前進、導軌后退以及排土裝置的運行。
4.2 控制電路的設計
以上介紹了主電路圖的設計過程,下面設計控制電路,將預先設計的程序輸入PLC中控制主電路的電機轉動,實現要求的運動形式。
控制電路的核心元件是FX1N系列微型可編程控制器,此PLC的供電電壓是+24V,通過主電路交直流轉化電路可得到這一電壓。控制電路由軟硬件同時組成。
將PLC的X0端作為輸入端,當閉合開機開關時,PLC得電,通過事先存儲的程序控制繼電器得電,近而控制電動機轉動,這樣由程序自動控制機車工作,而不需要人的干涉。PLC的輸出點Y0、Y1、Y2、Y3、Y4分別與繼電器KM1、KM2、KM3、KM4、KM5連接,這5個繼電器控制著主電路的5個電機。也就是說,PLC的5個輸出點控制著整個機車的運動過程。由于KM2、KM3控制著移動板的正反運動,即電機的正反轉,為了避免損壞電機,應該使用軟、硬件同時進行互瑣,確保KM2、KM3不同時得電。硬件的互鎖措施是將繼電器常閉觸點KM2、KM3與繼電器KM3、KM2串聯。
將KM5的常開觸點與開機開關并聯,因為繼電器KM5控制排土裝置的電機,根據設計的要求,工作時排土裝置是一直運行的,所以當按下開機開關時KM5得電,它的常開觸點閉合,使得控制電路閉合[8]。當需要關機時,按下關機開關,各繼電器都失電,開關KM5斷開,電路中斷。
通過GX Developer Version 7 軟件繪制設備的控制梯形圖,生成指令語句并寫入PLC中,實現自動化控制。
5 結 語
根據實際工況,以串聯機器人基本構型為基礎,結合虛擬樣機設計了道路管道施工輔助機器人,對機器人的工作條件、工作性能、電氣控制進行了研究,得到如下結論。
(1)傳統的非開挖設備只能鋪設直徑很小的管道,而本次設計的設備能夠鋪設直徑為0.8~1.6 m的比較大的管道,改善過去鋪設大管道時先開挖后填埋的現象。
(2)設計了切削刀頭和螺旋排土裝置,經過理論分析,這2個部分的設計都是合理的。
(3)機車各部分的電機都由PLC控制,通過預先設計的程序能夠實現給定的運動,機車自動控制一方面能夠保證施工的效率和速度,另一方面,這樣的非開挖自動施工與傳統的開挖施工相比,不僅施工過程變得簡單,而且成本降低。
參考文獻:
[1] 何 江.非開挖鋪設地下管線技術的發展現狀[J].管道技術與設備,2003(2):21-24.
[2] 薛 健.大口徑管材長距離頂進技術在西北地區的首次應用[J].筑路機械與施工機械化,2006,23(11):44-46.
[3] 金國海. 采用定向鉆機穿越高速公路路基鋪設拱橋拉索套管施工技術[C]∥第14屆全國結構工程學術會議論文集(第三冊),2005.
[4] 王 鵬,陳忠義.非開挖鋪設地下管線施工技術與設備[J].地質裝備,2002(3):7-11.
[5] 胡福生.3PTT并聯機構的研究及應用初探[D].淄博:山東理工大學,2006.
[6] 向冬枝,徐余偉.螺旋輸送機設計參數的選擇和確定[J].水泥技術,2010(1):16-20.
[7] 蔡 光,吳 謹,肖 瀟.基于ADAMS與ANSYS的柔性多體系統運動特性仿真分析[J].制造業自動化,2014(23):77-80.
[8] 杜義浩.并聯機器人軌跡規劃中的運動誤差補償方法研究[D].秦皇島:燕山大學,2012.
[責任編輯:王玉玲]
猜你喜歡
建材發展導向(2021年6期)2021-06-09 05:57:58
通信電源技術(2018年5期)2018-08-23 01:16:18
電子制作(2018年10期)2018-08-04 03:24:40
電子制作(2018年2期)2018-04-18 07:13:37
電子制作(2017年10期)2017-04-18 07:22:39
電子制作(2017年19期)2017-02-02 07:08:54
山東工業技術(2016年15期)2016-12-01 05:31:49
工業設計(2016年12期)2016-04-16 02:52:01
武夷學院學報(2015年3期)2015-07-18 11:03:46
機電信息(2014年20期)2014-02-27 15:53:20