鋼拱架安裝機械手臂逆動力學(xué)仿真
2016-04-21 17:19:08徐莉萍崔彥斌南曉青
筑路機械與施工機械化 2016年4期
徐莉萍 崔彥斌 南曉青

摘要:在充分了解鋼拱架安裝機工況的基礎(chǔ)上,運用Solidworks和ADAMS對機械臂進行三維實體建模和虛擬樣機逆動力學(xué)仿真,對機械臂各液壓缸鉸點處的受力進行分析,獲得液壓缸工作中的最大負(fù)載值,為液壓系統(tǒng)的設(shè)計做準(zhǔn)備,為機構(gòu)的整體設(shè)計提供了數(shù)據(jù)參考。
關(guān)鍵詞:鋼拱架安裝機;虛擬樣機;ADAMS仿真;逆動力學(xué)分析
中圖分類號:U415.51 文獻標(biāo)志碼:B
Abstract: On the basis of fully understanding the working condition of steel arch mounting machine, the three-dimensional entity model of mechanical arm was established with Solidworks and then imported into ADAMS for inverse dynamic simulation. The maximum load of each hydraulic cylinder in working state was obtained by analyzing the force at the hinge joints of hydraulic cylinder, which could be the preparation for the design of hydraulic systems and provide data references for further research on integrated design.
Key words: steel arch mounting machine; virtual prototype; ADAMS simulation; inverse dynamic analysis
0 引 言
鋼拱架安裝機是一種專用于安裝隧道支護結(jié)構(gòu)的工程機械裝置,它在隧道等地下作業(yè)中發(fā)揮著重要作用[1-2]。目前,中國在隧道建設(shè)方面發(fā)展很滯后,特別是鋼拱架安裝機這一關(guān)鍵技術(shù)和國外發(fā)達國家相比還有很大差距[13]。在國內(nèi),隧道施工中大多鋼拱架安裝設(shè)備是從國外進口的,不但價格昂貴,而且也不適用于中國的地質(zhì)環(huán)境,所以研發(fā)出一款適合中國施工用的鋼拱架安裝機已成為隧道施工技術(shù)中的當(dāng)務(wù)之急。
1 鋼拱架安裝機結(jié)構(gòu)設(shè)計
1.1 機械手臂的功能與組件
鋼拱架安裝機的機械手臂動作與人手臂動作極其相似,它通過一系列相互動作,以及對工作路徑和姿態(tài)的不斷調(diào)整,最終把鋼拱架安裝到目標(biāo)位置。機械手臂主要由大小臂工作機構(gòu)、手部調(diào)整機構(gòu)和抓持機構(gòu)組成,它們分別依靠大臂液壓缸、小臂液壓缸和手部調(diào)整液壓缸的伸縮以及手部液壓馬達的旋轉(zhuǎn)實現(xiàn)驅(qū)動[4-5]。
1.2 機械手臂零件的建模與裝配
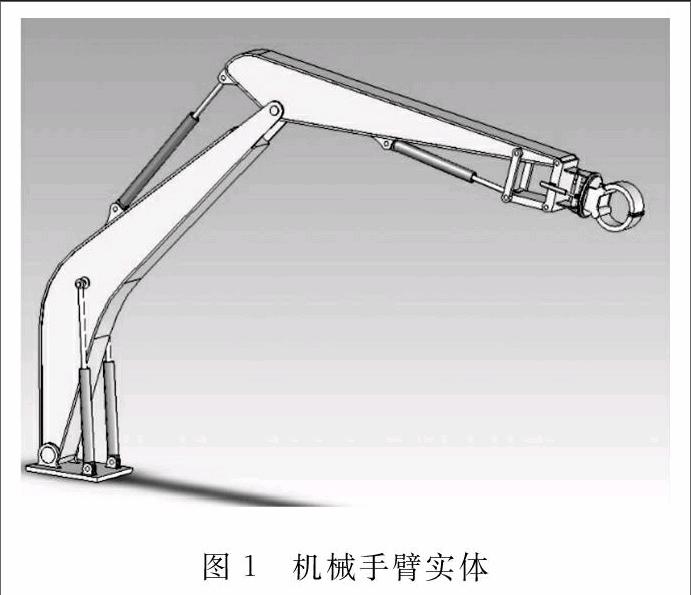
雖然ADAMS軟件可以完成簡單零件的三維幾何建模,但是對于較復(fù)雜的鋼拱架安裝來說并不方便。因此,采用Solidworks軟件分別完成大臂機構(gòu)、小臂機構(gòu)、手部調(diào)整機構(gòu)和夾持機構(gòu)等零件的創(chuàng)建。選取合適的液壓缸和馬達,按照恰當(dāng)?shù)难b配順序和配合要求把機械手臂的零部件正確安裝好,裝配好的實體如圖1所示。
2 鋼拱架安裝機械手臂動力學(xué)模型
2.1 機構(gòu)坐標(biāo)系的設(shè)定
為了便于分析,假定機械手臂是在垂直面內(nèi)工作,且在坐標(biāo)系的建立和仿真時僅對大臂、小臂、手部的運動進行研究,不考慮手部具體的擺動和回轉(zhuǎn)運動[6]。在矩陣變換等計算中對機械手臂模型進一步簡化,假定回轉(zhuǎn)平臺為零坐標(biāo)系且記為{0},那么與大臂、小臂、手腕固接的坐標(biāo)系依次記作{1},{2}和{3},則機械臂運動簡圖如圖2所示。機械臂連桿D-H參數(shù)如表1所示。
3 仿真試驗及結(jié)果分析
3.1 仿真試驗
根據(jù)鋼拱架安裝工作過程,在Solidworks軟件及Cosmos Motion插件下完成虛擬樣機的裝配、約束、驅(qū)動等參數(shù)[8]。本文要研究的是鋼拱架安裝機械手臂逆動力學(xué)問題,需將回轉(zhuǎn)工作臺固定,在Motion模塊下給液壓油缸添加移動副,在液壓馬達及其余鉸接零件上均添加轉(zhuǎn)動副,最后把模型導(dǎo)入ADAMS中進一步優(yōu)化,如圖3所示。運動副確定好之后,為每個運動副上添加相應(yīng)的驅(qū)動函數(shù),便可模擬機械手臂的運動。液壓缸工作中只有開始和結(jié)束時為加速過程,其余工作過程近似為勻速,所以液壓缸的驅(qū)動函數(shù)可以選擇STEP階躍函數(shù)[9]。
動力學(xué)問題分為正向和逆向動力學(xué)問題,正向動力學(xué)是解決機械手臂末端執(zhí)行器對于不同關(guān)節(jié)力或力矩的反應(yīng);逆向動力學(xué)是計算能夠產(chǎn)生期望軌跡所需要的關(guān)節(jié)驅(qū)動力和力矩。也就是說,根據(jù)終端的運動規(guī)律,求解應(yīng)施加的力或力矩,即確定機械臂所能驅(qū)動的力,因此研究逆解的意義要大于正解。
機械手臂終端的工作路徑可以理解為從動作一開始到動作二結(jié)束,為了便于觀察,在夾持機構(gòu)中心上選一觀測點A,仿真過程如圖4所示。
通過運動學(xué)仿真可以得到A點的運動規(guī)律,從速度和加速度曲線可知鋼拱架在安裝過程中的速度不大于200 mm·s-1,加速度不大于13 mm·s-2,液壓缸開始運動和結(jié)束運動時加速度有較大的沖擊,如圖5所示。從位移曲線(圖6)能夠看出,安裝機可以把拱架舉升到水平方向(x方向)15 m、垂直方向(y方向)13 m的位置,均在最大安全距離范圍之內(nèi)。
3.2 動力學(xué)仿真試驗結(jié)果分析
在前面所得運動規(guī)律的基礎(chǔ)上利用ADAMS軟件進行逆動力學(xué)分析。對于不同的工況,鋼拱架的安裝軌跡也不盡相同,選取鋼拱架不同的安裝軌跡分別完成機械臂液壓缸鉸點處受力的仿真,可以得到機械臂在工作時所能舉起的最大負(fù)載。所以仿真得出每個軌跡下各液壓缸鉸點處的受力變化曲線,也是機械臂各個液壓缸所能驅(qū)動的負(fù)載變化曲線,如圖7~9所示,液壓缸鉸點處受力用F表示。
3.3 仿真結(jié)果分析
從仿真曲線可知,在鋼拱架剛開始舉升時鉸點受力較小,隨著舉升角度不斷增大,舉升高度不斷增加,舉升力也不斷增強,姿態(tài)調(diào)整和轉(zhuǎn)動過程中伴隨有一定的瞬間沖擊現(xiàn)象,最后受力基本保持恒定。從圖7中還能看出,大臂液壓缸鉸點受力最大約為479 kN,小臂液壓缸鉸點受力最大約為540 kN,手部液壓缸鉸點受力最大約為73 kN,液壓缸鉸點受力最大值也是機械臂每個液壓缸所能驅(qū)動的最大負(fù)載,可知機械臂工作中的最大負(fù)載能夠滿足其剛度要求。若因剛度不夠而出現(xiàn)失穩(wěn),會造成重大經(jīng)濟損失,或在流場中發(fā)生顫振等災(zāi)難性事故,嚴(yán)重影響施工安全;因此在機構(gòu)設(shè)計中,必須按規(guī)范要求確保機構(gòu)有足夠的剛度。研究鋼拱架安裝機械臂各液壓缸鉸點受力的意義還在于,為以后進一步設(shè)計分析做準(zhǔn)備,從而降低開發(fā)風(fēng)險,縮短研發(fā)周期,提高產(chǎn)品性價比。
4 結(jié) 語
利用Solidworks軟件完成了虛擬樣機的裝配,建立了鋼拱架安裝機構(gòu)機械臂動力學(xué)模型,在ADAMS下進行了機械手臂的逆動力學(xué)分析,得到了各液壓缸鉸點的受力情況,確定了機械臂液壓缸工作時的最大負(fù)載,為液壓系統(tǒng)設(shè)計及整機設(shè)計提供了依據(jù)。由于建立動力學(xué)模型及動力學(xué)方程的構(gòu)造時對模型作了許多簡化,降低了方程的精確度,但是仿真結(jié)果對系統(tǒng)分析依然有效;因此研究鋼拱架安裝機械臂各液壓缸鉸點的受力對鋼拱架安裝機的整體設(shè)計、制造具有重要的指導(dǎo)意義。
參考文獻:
[1] 楊善勝.軟弱圍巖隧道合理支護型式研究[D].西安:長安大學(xué),2008.
[2] 董志斌.新型鋼拱架安裝機工作裝置的設(shè)計與仿真分析[J].筑路機械與施工機械化,2013,30(6):96-98.
[3] 張大慶.液壓挖掘機工作裝置運動控制研究[D].長沙:中南大學(xué),2006.
[4] 詹晨菲.鋼拱架安裝機械手臂設(shè)計及運動控制研究[D].洛陽:河南科技大學(xué),2013.
[5] 熊李依.鋼拱架安裝機械手關(guān)鍵技術(shù)研究[D].鄭州:鄭州大學(xué),2012.
[6] 沈雅瓊,葉伯生,熊 爍.基于齊次變換矩陣的機器人軌跡規(guī)劃方法[J].組合機床與自動化加工技術(shù),2014(1):5-9.
[7] 于國飛.基于Matlab的挖掘機工作裝置動力學(xué)方程[J].農(nóng)業(yè)機械學(xué)報,2003(2):93-96.
[8] 李 艷,任德志,徐莉萍.基于虛擬樣機的鋼拱架安裝機構(gòu)的設(shè)計與仿真分析[J].起重運輸機械,2011(1):27-31.
[9] 徐會敢,劉東明,周龍剛.基于ADMAS的壓路機試驗臺振動系統(tǒng)仿真分析[J].筑路機械與施工機械化,2014,31(1):58-59.
[責(zé)任編輯:王玉玲]