多發多收探測雷達定位精度分析
2016-04-23 06:26:07郭文玲李雪李吉寧魯轉俠曹紅艷
電波科學學報 2016年1期
郭文玲 李雪 李吉寧 魯轉俠 曹紅艷
(中國電波傳播研究所,青島 266107)
?
多發多收探測雷達定位精度分析
郭文玲李雪李吉寧魯轉俠曹紅艷
(中國電波傳播研究所,青島 266107)
摘要多發多收是提高雷達系統定位精度的重要手段之一,為分析不同形式多發多收定位精度,采用二維定位幾何精度稀釋分析方法,分別針對兩發兩收、兩發四收和三發三收三種探測方式進行了仿真分析.結果表明:兩發四收探測系統定位精度比兩發兩收系統整體上提高,在基線近區提高比較明顯;三發三收探測系統克服了兩發兩收探測系統在基線上定位盲區的缺點,但與兩發四收探測系統相比,除基線附近外,在三站圍成的定位區域內定位性能并沒有明顯提高.仿真結果為多發多收探測系統選取、布站提供了理論參考,具有一定的工程應用價值.
關鍵詞多發多收;雷達;幾何精度稀釋
DOI10.13443/j.cjors.2015020702
The positioning accuracy analysis of multi-transmit multi-receive detection radar
GUO WenlingLI XueLI JiningLU ZhuanxiaCAO Hongyan
(ChinaResearchInstituteofRadiowavePropagation,Qingdao266107,China)
Abstract Multi-transmit multi-receive (MTMR) is an important mean to improve the positioning accuracy of the radar system. To analyze the positioning accuracy of different MTMR systems, we use two-dimensional positioning GDOP analysis method to simulate the systems of two-transmit two-receive, two-transmit four-receive and three-transmit three-receive (2T2R, 2T4R, 3T3R). The results show that: compared with the 2T2R, the positioning accuracy of the 2T4R system is overall improved and the improvement much more obviously in the near baseline zone; the 3T3R overcomes the defects of the 2T2R that has positioning blind zone on the baseline, however, compared with the 2T4R, positioning accuracy of the region rounded by the three stations is not obviously improved except in the near baseline zone. The simulation results provide theoretical reference in MTMR detection system selection and radar station deployment,and thus is valuable to radar configuration applications.
Keywords multi-transmit multi-receive; radar; GDOP
引言
多發多收雷達具有良好的抗電子干擾、抗超低空突防、抗反輻射導彈、抗隱身武器的能力,是目前雷達領域研究的重點之一[1]. 由于收發分離,發射機可部署在遠離戰場的安全部位,接收機無源工作,可部署在戰區的前沿,增強了抗有源干擾和抗反輻射導彈能力. 同時通過多發多收組成雷達網,不僅擴大了雷達的覆蓋范圍,提高發現能力和定位精度,對隱身目標探測[2]也是一種有效的技術途徑. 多發多收雷達的不同探測系統和設備探測能力對系統的定位精度都有很大影響.
目前,對多發多收雷達定位性能進行的研究主要集中在以下三個方面:第一,基于測向定位,文獻[3]以測向定位為基礎對定位誤差與雷達布站的關系進行了分析;第二,基于測距定位,文獻[4]對基于純測距的距離和的多基地雷達定位進行了研究;第三,基于測向和測角的聯合定位,文獻[5]基于雙/多基地雷達的仰角、方位角與距離等參量的聯合探測對目標進行定位.
基于測向的目標定位方法,角度誤差對定位精度影響較大[6]. 對某些波長較長的探測系統,如超短波雷達、高頻雷達等,其方位分辨率通常較低,為獲得高的方位分辨率通常需要配備大規模的天線陣,代價較高. 基于距離的目標定位方法,距離的測量精度相對較高,但是兩發兩收的兩站探測系統定位精度有限,基于距離和的一發多收的多基地定位,至少需要選取3個站址. 針對該類探測系統存在的問題,本文提出一種基于距離定位的兩發四收探測體制,該體制不僅降低系統規模,提高定位精度,同時還避免單站雷達切向盲速問題.如圖1所示,探測系統布置在A、B兩地,兩地分別有發射設備和接收設備,接收設備可接收A、B兩地的發射信號. 這種探測體制只需選取兩個探測站,降低了多個站址選取的難度.
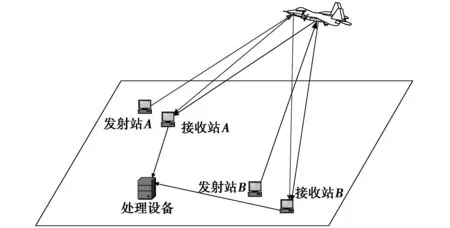
圖1 兩發四收探測體制示意圖
1探測系統定位精度理論分析
1.1定位精度分析方法
幾何精度稀釋(Geometrical Dilution of Precision, GDOP)[7]是衡量定位系統性能的重要指標之一,是定位誤差均方根與測距誤差均方根的比值,當他們單位相同時,無綱量,反映了布站系統對探測點的定位性能. 測距誤差相同的情況下,GDOP越小,定位性能就越好. 文獻[8]通過對多基地雷達不同布站方式GDOP的分析,得出要提高定位精度,應在扇形交替布站情況下,增加接收站數量的結論. 文獻[9]通過對定位系統GDOP的分析得出最優定位點位置的關系式.
本文也以GDOP為系統定位性能的評估依據,對基于距離定位的兩發兩收、三發三收和兩發四收探測體制定位性能進行仿真分析.
雷達定位性能受雷達站址誤差、隨機測量誤差和雷達網時間同步誤差的影響. 其中站址誤差小于10 m[10],時間同步誤差小于1 μs,相比于測距誤差,這兩個誤差影響比較小,可以暫不考慮.
設定所有的距離測量是相互獨立的,探測站的測量誤差均值為零,誤差標準差都為σr.
以A、B兩探測站連線為x軸,兩站間的中垂線為y軸,y軸的正方向指向雷達的探測區域建立直角坐標系. 設目標坐標為(x,y),雷達探測站坐標為(xi,yi),探測站測得的距離為Ri.
對于兩維定位系統,其GDOP表達式為[11]
(1)
式中: σx表示在x軸方向上的定位誤差標準差; σy表示在y軸方向上的定位誤差標準差.
基于距離定位的兩發兩收和三發三收探測系統獲取的探測信息為
(2)
N=2時表示兩發兩收探測系統,N=3時表示三發三收探測系統.定位精度表示為[12]
(3)
式中,
G=(HTQ-1H)-1,
(4)
Q為探測站測距誤差協方差矩陣,N=2時,
(5)
N=3時,
(6)
(7)
對于本文提出的兩發四收探測體制,有A、B兩個探測站,4條探測路徑,獲取的距離信息如式(8)和式(9)所示:
(8)
(9)
此時,
(10)
即
(11)
探測站測距誤差協方差矩陣為
(12)
1.2定位精度仿真結果
仿真研究中,設定兩探測站相距320km,探測區域為x軸上-160km到160km,y軸上0km到300km. 假設各個探測站的距離測量誤差是相互獨立的,距離測量誤差均值為零,均方根誤差為1km,
即
σr=1.
(13)
兩發四收與兩發兩收探測系統GDOP對比如圖2所示. 由圖2(a)可知兩發四收探測系統定位性能優于兩發兩收探測系統,特別是在距離基線100km附近,如圖2(b)所示,定位性能提高較大. 兩發四收的最小GDOP為1.1,而兩發兩收最小值為1.5.

(a) 探測區域GDOP對比
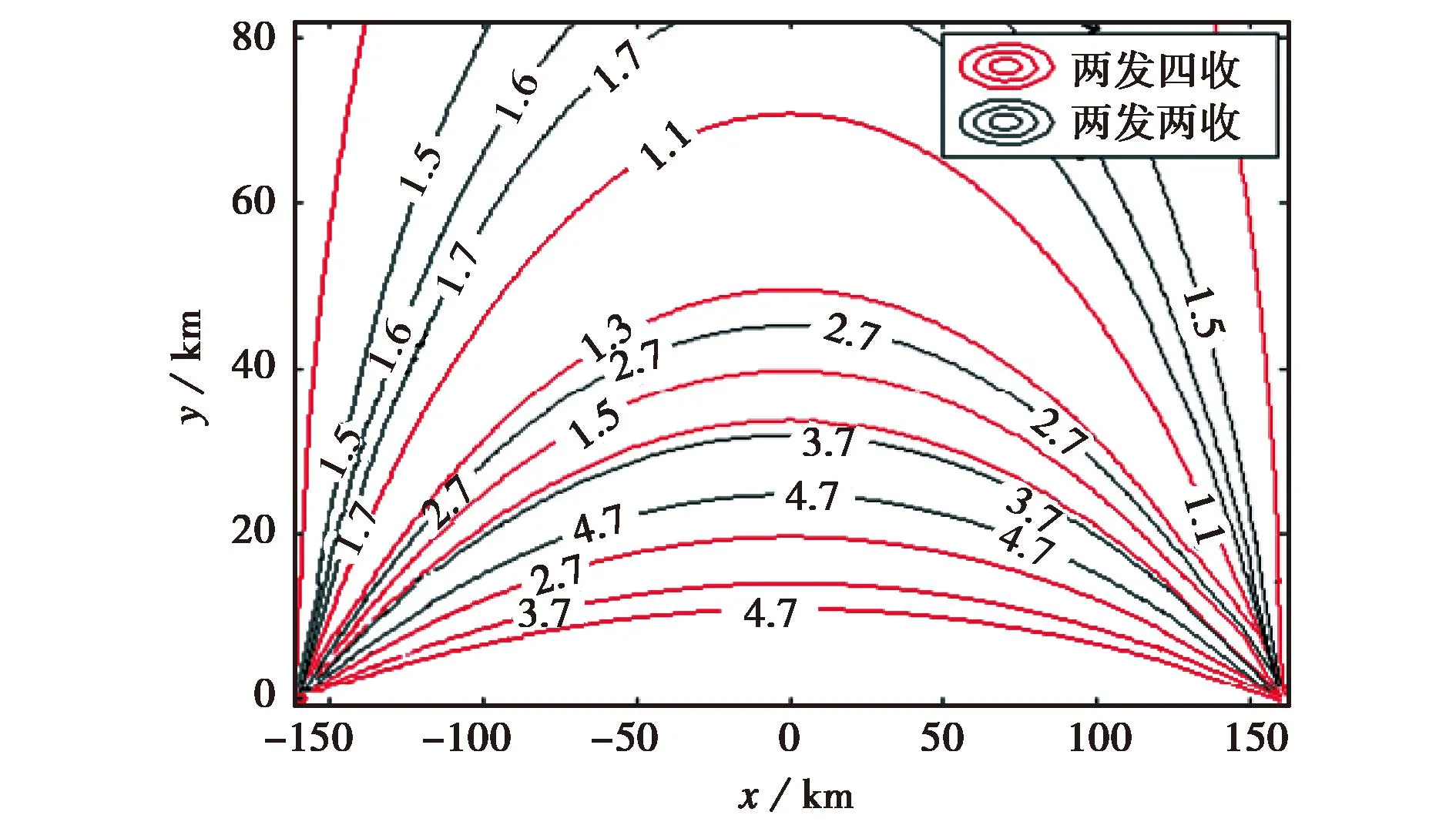
(b) 探測區域近區GDOP對比圖2 兩發四收與兩發兩收探測體制GDOP對比
對于三發三收的三站探測,當三站按正三角形布站時三站圍成區域內的定位性能最好[13]. 本文選用三站最佳布站,正三角形布站進行仿真,其中兩個探測站分布與兩發四收的相同,第三個探測站設置在兩發四收的兩個站的正前方(即坐標y>0).
兩發四收與三發三收探測系統GDOP對比如圖3所示. 把三發三收探測系統三站圍成的區域定義為探測區域. 三發三收探測系統相比于兩發四收探測系統消除了探測站基線上的定位盲區. 三發三收系統的最小GDOP為1.2,兩發四收系統的最小GDOP為1.1. 在探測區域內除了兩發兩收探測系統基線附近GDOP低于三發三收探測系統,其余區域兩探測系統的定位性能相當,GDOP都在1.4以內,而且兩發四收探測系統的最佳定位區要大于三發三收探測系統.在實際應用中,探測區域要距離基線一定的距離,因此從實際應用角度講,兩發四收探測系統的定位性能要高于三發三收系統,同時相比于三發三收探測系統所需站址減少,降低了探測站站址的勘選難度.
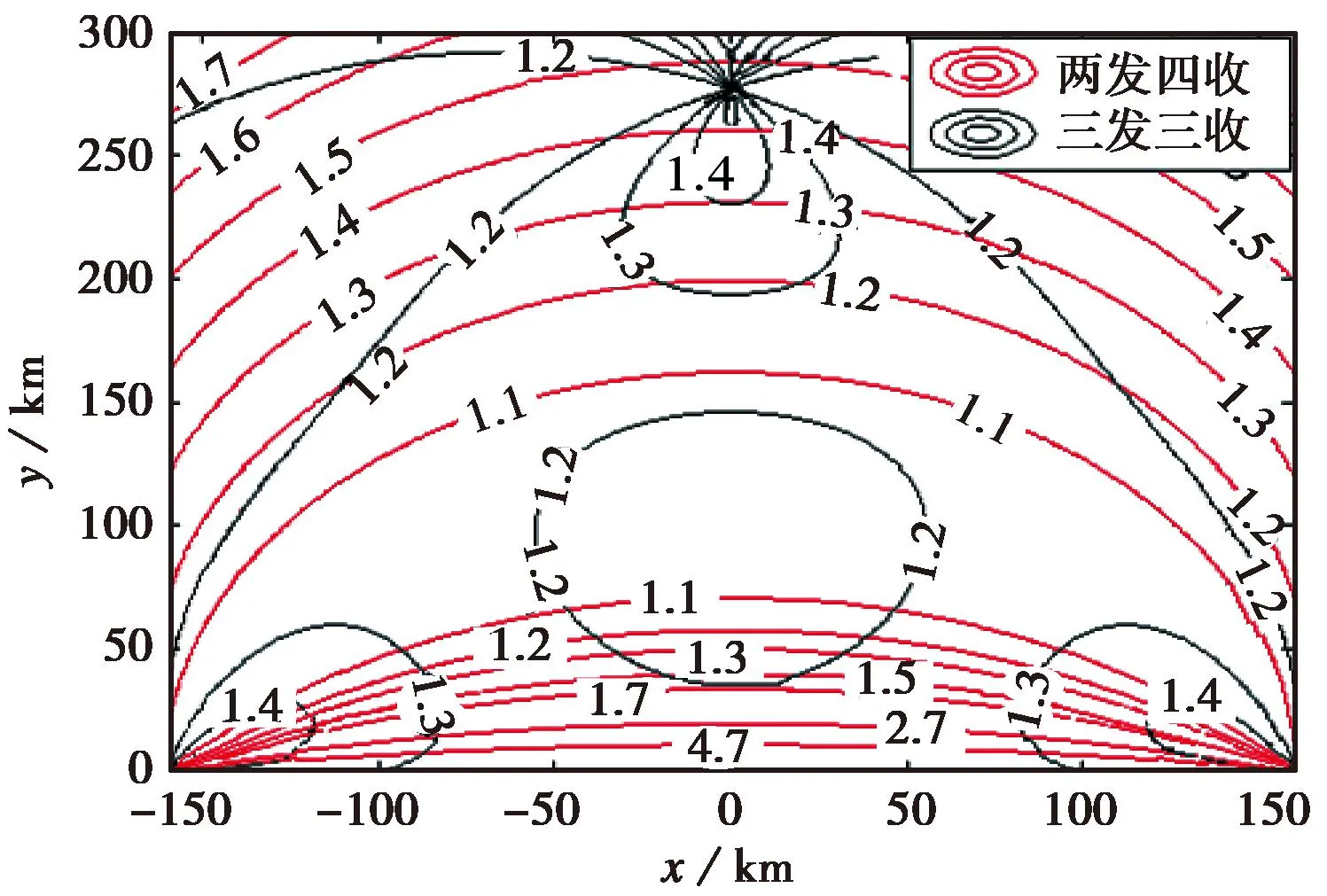
圖3 兩發四收與三發三收探測系統GDOP
2基于假定航跡的定位精度仿真驗證
基于距離定位的兩發兩收探測體制的定位可根據獲取的距離信息直接求取交點.
對于三發三收和兩發四收探測體制,應用文獻[14]中的牛頓迭代算法進行定位. 牛頓迭代算法的一個關鍵技術是迭代初始值的選取.
對三發三收探測體制,初始值選取兩個圓交點,當沒有交點時,選取探測區域內一點作為初始值(一般取探測區域的中心點).
對兩發四收探測體制,初始值選取兩個圓和一個橢圓的三個交點的平均值,當測量誤差較大時可能出現達不到三個交點的情況甚至沒有交點,對這種現象初始值按以下規則進行選取:
●如果有三個交點,求取三個交點的平均值作為迭代初始值;
●如果只有兩個交點,求取兩個交點的平均值作為迭代初始值;
●如果只有一個交點,把這點作為初始值;
●如果沒有交點,則假定探測區域內的某一點(一般取探測區域的中心點)作為迭代的初始值.
假設各個探測站的距離測量誤差均值為零,均方根誤差為1km.
對三種探測體制根據定位算法進行定位分析.對兩發四收和三發三收探測體制迭代定位時,每個定位點進行10 000次蒙特卡洛計算.
假定三條定位航跡,在三種探測體制下分別進行定位均方根誤差的比較,三條航跡如下所示:
航跡一:x=0,y為40km到250km;
航跡二:y=0.7*x+100,其中x∈[-100,100];
航跡三:x∈[-100,100],y=100.
三條航跡分布如圖4所示,圖中黑色箭頭表示目標航跡航行方向.
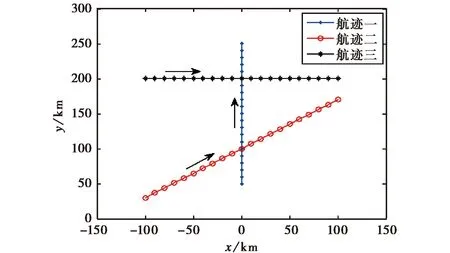
圖4 三條航跡示意圖
三種探測體制下,三個目標航跡的定位均方根誤差分布如圖5(a)、(b)和(c)所示.

(a) 航跡一
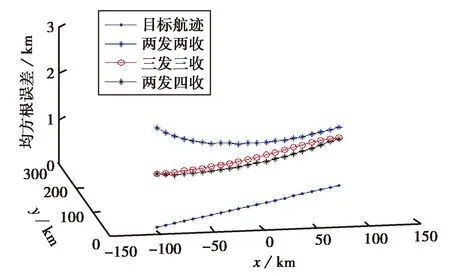
(b) 航跡二

(c) 航跡三圖5 三種探測體制下定位誤差均方根比較
表1所示為假定的三條航跡上定位點在三種探測體制下的定位誤差均值.由表1可知:三發三收探測體制下定位誤差比兩發兩收探測體制下定位誤差至少小0.3km;兩發四收探測體制下定位誤差比三發三收探測體制下定位誤差小0.1km左右. 可見,兩發四收探測系統定位誤差最小,兩發兩收探測系統定位誤差最大.
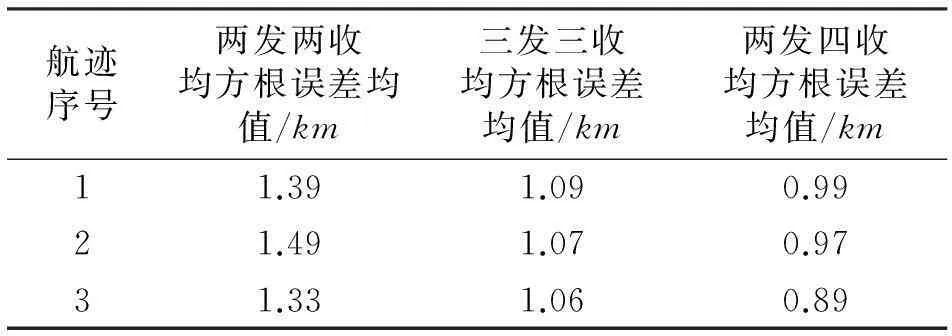
表1 航跡定位誤差均值比較
由分析可知,各個探測系統的定位均方根誤差與GDOP變化趨勢相符. 兩發四收探測系統的定位精度最好,三發三收探測系統的定位精度次之,兩發兩收探測方式的定位精度最差.
3多發多收實驗數據驗證
為了進一步驗證理論仿真正確性,開展了民航探測試驗,探測設備分別布置在相距40km的A、B兩地,兩站設有一個發射設備兩個接收設備,其中兩個接收機分別接收本地發射信號和另一探測站發射信號,構成了兩發兩收和兩發四收探測系統. 其中,系統發射功率為1kW、帶寬為80MHz、工作頻率分別為26.5MHz、27.3MHz,采用中斷線性調頻信號,利用AirNav接收設備獲取民航目標的真實地理位置.
在上述試驗布站方案下,試驗獲取某航班真實航跡(AirNav數據)在GDOP分布中的位置如圖6所示. 由圖可知,本航班航跡所在區域定位性能較好. 分別采用兩發四收和兩發兩收探測系統對上述航班進行定位,航班航跡定位對比如圖7所示. 其中,兩發兩收探測系統定位誤差均值為3.15km,兩發四收探測系統定位誤差均值為2.66km,兩發四收探測系統定位精度高于兩發兩收探測系統.
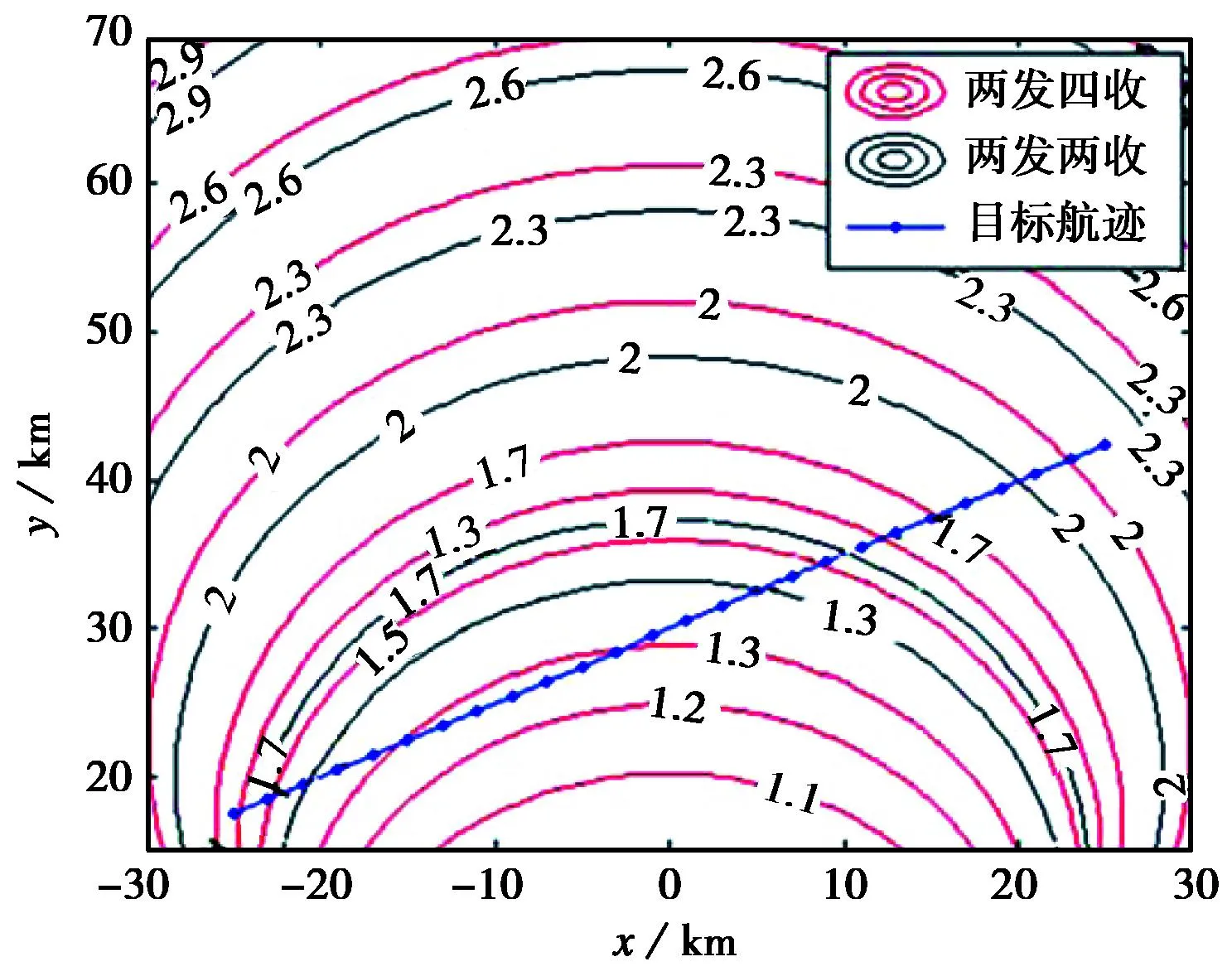
圖6 某航班航跡在GDOP圖中位置

圖7 試驗某航班航跡定位對比圖
4結論
基于測距定位系統中本文提出的兩發四收探測體制與兩發兩收和三發三收兩種探測系統進行了GDOP仿真分析,兩發四收探測系統與兩發兩收探測系統相比,探測區域定位性能提升;與三發三收探測系統相比除基線外,在三站圍成區域內定位性能相當. 在對假定的典型航跡進行定位均方根誤差分析可知,兩發四收探測體制的定位性能最好. 總之,本文提出的兩發四收探測體制可以在兩發兩收探測系統布站的情況下達到三發三收探測體制的定位精度,它既提高了兩發兩收探測系統的定位精度又降低了三發三收探測系統的三個探測站站址的勘選問題,試驗數驗證了仿真理論的正確性.
本文研究內容為多發多收探測系統的選取和布站提供理論參考,具有一定的工程應用價值.
參考文獻
[1]李學勇. 雙/多基地雷達發展及關鍵技術[J]. 雷達與對抗, 2013, 33(2): 4-8.
LIXY.Developmentandkeytechnologiesofbistatic/multistaticradars[J].Radar&ECM, 2013, 33(2):4-8.(inChinese)
[2] 張建新, 張永順, 曲靖華. 雙/多基地雷達反隱身定位分析[J]. 彈箭與制導學報, 2006, 26(2): 987-988.
ZHANGJX,ZHANGYS,QUJH.Analysisofcounter-stealthpositioninginbistaticormultistaticradar[J].Journalofprojectiles,rockets,missilesandguidance, 2006, 26(2): 987-988.(inChinese)
[3] 李興民, 李國君, 李健, 等. 雙站交叉定位雷達布站方法研究[J]. 雷達科學與技術, 2011, 9(5): 405-408.
LIXM,LIGJ,LIJ,etal.Radarconfigurationresearchofdoublestationcrosslocation[J].Radarscienceandtechnology, 2011, 9(5): 405-408.(inChinese)
[4] 馮廣飛, 謝軍偉, 楊守國, 等. 基于距離和定位的雙/多基地雷達定位精度分析[J]. 現代防御技術, 2011, 39(2): 65-68.
FENGGF,XIEJW,YANGSG,etal.Analysisofpositionfindingerrorsbasedonsumofdistancelocationinbistatic/multistaticradar[J].Moderndefencetechnology, 2011,39(2):65-68. (inChinese)
[5] 劉軍, 解嘉宇, 郭繼周. 多基地雷達馬氏定位算法優化[J]. 電訊技術, 2010, 50(7): 97-101.
LIUJ,XIEJY,GUOJZ.OptimizationofMarkovestimationalgorithmformultistaticradarpositioning[J].Telecommunicationengineering, 2010, 50(7): 97-101. (inChinese)
[6] 余洪濤, 張永順, 齊立峰. 對一種多基地雷達系統定位精度的計算與分析[J].空軍工程大學學報:自然科學版,2005,6(4):8-11.
YUHT,ZHANGYS,QILF.Calculationandanalysisofprecisionoflocalizationofamulti-staticradarsystem[J].JournalofAirForceEngineeringUniversity:naturalscienceedition, 2005, 6(4): 8-11. (inChinese)
[7] 孫終康, 周一宇, 何黎星. 單多基地有源無源定位技術[M]. 北京:國防工業出版社,1996: 37-43.
[8] 牛超, 張永順. 基于GDOP的多基地雷達布站優化研究[J]. 現代防御技術, 2013, 31(3): 117-123.
NIUC,ZHANGYS.SitesdistributionoptimizationmodelofmultistaticradarbyGDOP[J].Moderndefensetechnology, 2013, 31(3):117-123. (inChinese)
[9] 吳魏, 王國宏, 王娜, 等. 雙基地雷達定位系統的最優定位點研究[J].現代防御技術, 2010, 38 (2): 89-92.
WUW,WANGGH,WANGN,etal.Optimumlocationpointinbistaticradarlocationsystem[J].Moderndefencetechnology, 2010, 38(2):89-92. (inChinese)
[10]徐宏, 韓壯志, 何強, 等. 自衛式干擾火控雷達網測向交叉定位精度分析[J].火力指揮與控制, 2011, 36(5): 25-28.
XUH,HANZZ,HEQ,etal.Performanceanalysisofdirection-findinglocationorientedtoself-defensejamminginfire-controlradarnet[J].Firecontrol&commandcontrol, 2011, 36(5):25-28. (inChinese)
[11]楊雷明. 信號處理中無源定位的分析與研究[D]. 西安:西安電子科技大學, 2012.
YANGLM.AnalysisofandResearchonPassiveLocationinSignalProcessinginSignalProcessing[D].Xi’an:XidianUniversity, 2012.(inChinese)
[12]LEVANONN.LowestGDOPin2-Dscenarios[J].IEEEproceedingradarsonarandnavigation, 2000, 147(3):149-155.
[13]MANOLAKISDE.Efficientsolutionandperformanceanalysisof3-DpositionestimationbyTrilateration[J].IEEEtransactionsonaerospaceandelectronicsystems, 1996, 32(4): 1239-1248.
[14]楊振起, 張永順, 駱永軍. 雙(多)基地雷達系統[M]. 北京:國防工業出版社, 1998: 205-215.
郭文玲 (1986-),女,山東人,碩士,工程師,目前主要研究方向為電離層電波傳播、雷達信號處理等.
李雪 (1981-),男,黑龍江人,博士,高級工程師,目前主要研究方向為電離層回波信號處理、雷達信號處理、電波傳播等.
李吉寧 (1982-),男,山東人,碩士,工程師,目前主要研究方向為高頻超視距雷達、雷達信號處理和電波傳播.
魯轉俠 (1978-),女,陜西人,碩士,高級工程師,主要研究方向為天波斜向探測電離層圖數值分析、模擬、判讀和電離層回波信號處理等.
曹紅艷 (1977-),女,河南人,碩士,高級工程師,主要從事短波頻率預測方法研究及軟件開發.
作者簡介
中圖分類號TN95
文獻標志碼A
文章編號1005-0388(2016)01-0047-06
收稿日期:2015-02-07
郭文玲, 李雪, 李吉寧, 等. 多發多收探測雷達定位精度分析[J]. 電波科學學報,2016,31(1):47-52.DOI:10.13443/j.cjors.2015020702
GUO W L, LI X, LI J N, et al. The positioning accuracy analysis of multi-transmit multi-receive detection radar[J]. Chinese journal of radio science,2016,31(1):47-52. (in Chinese). DOI:10.13443/j.cjors.2015020702
資助項目: 中國電子科技集團公司技術創新基金(JJ-QN-2013-28); 國家自然科學基金(61302006)
聯系人: 郭文玲 E-mail:wenling_869@126.com