基于WiFi的室內(nèi)定位系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
2016-04-27 06:06:15楊鵬浙江工貿(mào)職業(yè)技術(shù)學(xué)院成人教育學(xué)院浙江溫州325000
長江大學(xué)學(xué)報(bào)(自科版) 2016年7期
楊鵬 (浙江工貿(mào)職業(yè)技術(shù)學(xué)院成人教育學(xué)院,浙江 溫州 325000)
熊曾剛 (湖北工程學(xué)院計(jì)算機(jī)與信息科學(xué)學(xué)院,湖北 孝感 432000)
?
基于WiFi的室內(nèi)定位系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
楊鵬(浙江工貿(mào)職業(yè)技術(shù)學(xué)院成人教育學(xué)院,浙江 溫州 325000)
熊曾剛(湖北工程學(xué)院計(jì)算機(jī)與信息科學(xué)學(xué)院,湖北 孝感 432000)
[摘要]針對傳統(tǒng)的指紋識別室內(nèi)定位算法中指紋地圖制作階段需要大量的人工測量成本和室內(nèi)環(huán)境中無線信號不穩(wěn)定等問題,設(shè)計(jì)了一套基于K-strongest RSS Index(KSRI)算法的室內(nèi)定位系統(tǒng)。通過KSRI算法的定位原理、定位模型和定位算法說明了其可行性,并進(jìn)行了系統(tǒng)軟件設(shè)計(jì)和系統(tǒng)性能測試。相比NN(Nearest Neighbor)和KNN(K-Nearest Neighbor)算法,KSRI算法在定位精確度、定位穩(wěn)定性和計(jì)算量等方面均取得了最佳性能。基于KSRI算法的室內(nèi)定位系統(tǒng)可以很好的解決室內(nèi)的定位問題,具有很大的使用價值和應(yīng)用前景。
[關(guān)鍵詞]室內(nèi)定位;指紋識別;KSRI算法
隨著信息時代的到來,導(dǎo)航與通信技術(shù)在互相交融中飛速的發(fā)展,導(dǎo)航系統(tǒng)與通信系統(tǒng)緊密的結(jié)合,使用戶在導(dǎo)航定位信息產(chǎn)生更大的應(yīng)用價值。GPS在室外定位中得到廣泛的應(yīng)用[1],但在室內(nèi)或者建筑物密集的室內(nèi)很難搜索到衛(wèi)星信號,因此,人們提出了許多室內(nèi)定位技術(shù)解決方案,如A-GPS定位技術(shù)[2]、超聲波定位技術(shù)(Ultrasonic)[3]、超寬帶定位技術(shù)(UWB)[4]、紅外線定位技術(shù)(infrared)[5]、藍(lán)牙定位技術(shù)(Bluetooth)[6]、射頻識別定位技術(shù)(RFID)[7]、ZigBee定位技術(shù)[8]、地磁定位技術(shù)[9]、FM廣播定位技術(shù)[10]和WiFi[11,12]定位技術(shù)等。
目前基于WiFi的室內(nèi)定位系統(tǒng)中,絕大多數(shù)都是基于接收信號強(qiáng)度(Received Signal Strength,RSS)的指紋識別算法[13~15]。該算法是一種基于指紋數(shù)據(jù)庫的匹配定位算法,通過建立定位區(qū)域信號強(qiáng)度的指紋數(shù)據(jù)庫,再與實(shí)時采集的信號強(qiáng)度進(jìn)行匹配來達(dá)到位置估計(jì)的目的。
基于指紋識別的算法可以分為離線測試階段和在線定位階段,其定位算法主要有2個缺點(diǎn):第一,離線建立指紋數(shù)據(jù)庫階段需要人工手動測量,人力成本較大;第二,信號強(qiáng)度容易受到環(huán)境干擾,造成在線定位階段測量到的信號強(qiáng)度有波動,造成匹配指紋錯誤定位誤差較大。為了盡量降低上述2個缺點(diǎn)帶來的影響,筆者提出了一種基于K-strongest RSS Index(KSRI)算法的室內(nèi)定位系統(tǒng)的設(shè)計(jì)方案。
1定位原理
隨著室內(nèi)環(huán)境中的WiFi無線網(wǎng)絡(luò)的廣泛普及,利用WiFi信號進(jìn)行室內(nèi)定位變得更具有可行性,大多數(shù)的室內(nèi)定位技術(shù)都是基于RSS作為位置估計(jì)。在理論上,無線信號在自由空間內(nèi)傳播距離d后,接受信號強(qiáng)度可表示為:
(1)
式中,Pr為接受點(diǎn)的信號強(qiáng)度;Po為接受點(diǎn)的參考距離;n為由環(huán)境因素決定的路徑損耗指數(shù); do為參考距離,一般選取1m;Xσ是服從高斯正太分布的隨機(jī)數(shù)。
從信號衰減的模型(式(1))可以看出,在不同點(diǎn)接收的信號強(qiáng)度不一樣,就可根據(jù)信號強(qiáng)度與坐標(biāo)一一對應(yīng)來建立指紋地圖。
室內(nèi)環(huán)境中,信號在傳播過程中很容易受到不同程度的影響,造成影響的因素主要是非視距傳播、多徑傳播和陰影效應(yīng)。無線信號傳播衰減模型很難表征距離和信號強(qiáng)度間的映射關(guān)系,但是在某一點(diǎn)接收到的信號強(qiáng)度雖也存在一定的波動,但基本上是趨于穩(wěn)定的。這種不同的區(qū)域具有不同的信號強(qiáng)度可以作為指紋信息,為基于指紋識別的室內(nèi)定位技術(shù)提供了可能性。
2定位模型
基于指紋識別的定位算法的定位過程中,離線測試階段是在定位區(qū)域選取若干個參考點(diǎn),收集參考點(diǎn)的信號強(qiáng)度并保存在數(shù)據(jù)庫;在線定位階段則是根據(jù)實(shí)時采集的信號強(qiáng)度去匹配數(shù)據(jù)庫中的值,從而獲得目標(biāo)的位置估計(jì)。
2.1離線測試
由于移動終端在不同方向接收同樣的信號強(qiáng)度是有差異的,所以建立指紋地圖過程中需要對每一個參考點(diǎn)采集不同方向的指紋信息。指紋地圖Ω表示如下:
(2)

為了減少人工測量成本,系統(tǒng)開發(fā)了基于手機(jī)的指紋地圖管理軟件來智能地創(chuàng)建指紋地圖。首先上傳定位區(qū)域的平面地圖,然后在平面地圖上選擇需要建立指紋的參考點(diǎn),開始測量指紋信息,最后保存指紋數(shù)據(jù)。依次類推,就可以很方便的建立指紋地圖。
2.2在線定位
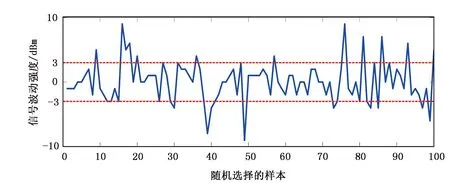
圖1 信號波動
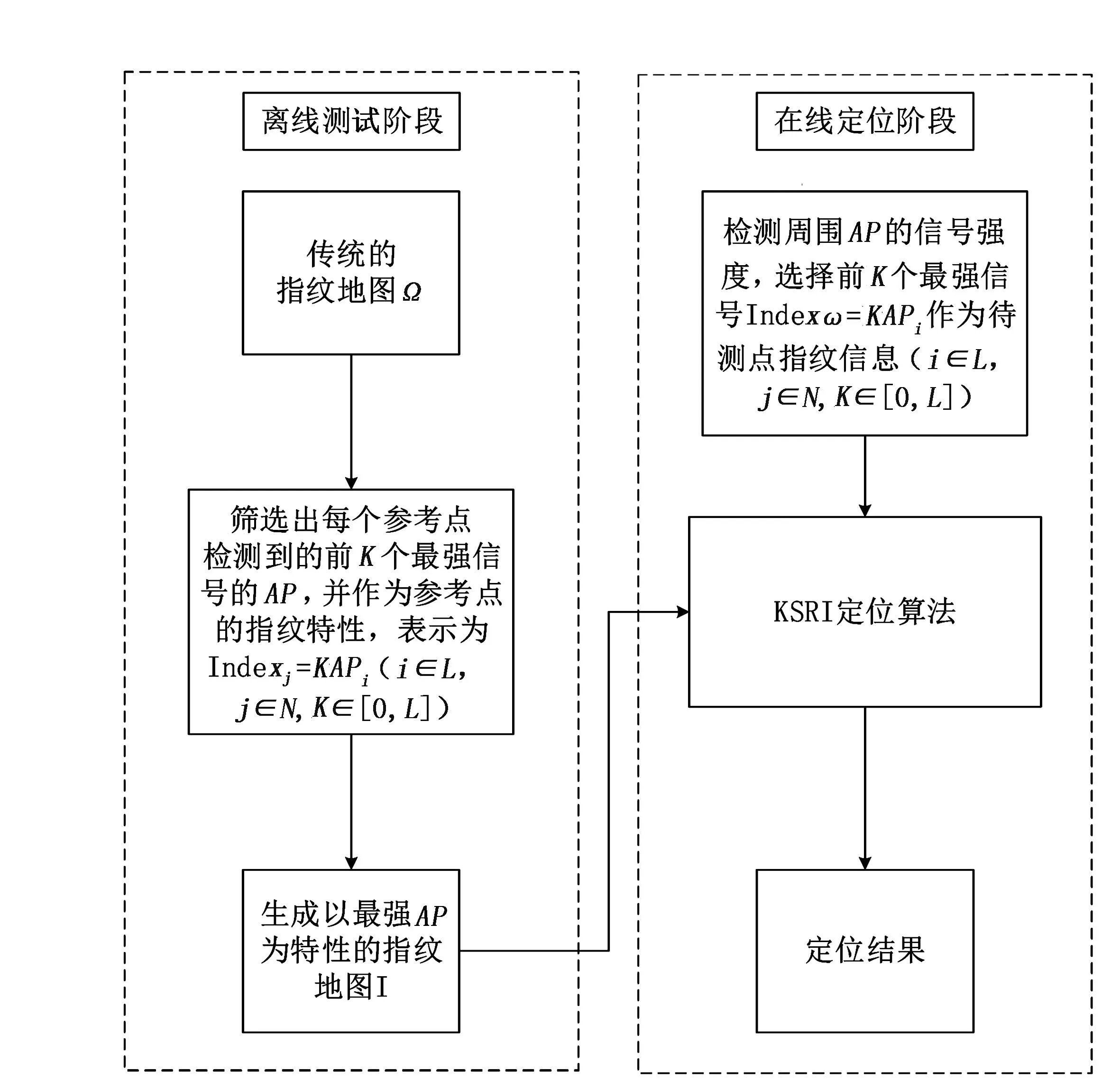
圖2 定位流程圖
為研究室內(nèi)環(huán)境對信號干擾的問題,筆者以某高校現(xiàn)代教育中心為定位環(huán)境,對比了在相同的位置不同的時間測量的信號強(qiáng)度,隨機(jī)的選取整棟樓的3560個樣本中的100個樣本作為研究對象,2次測量的信號強(qiáng)度波動如圖1所示。
信號的波動是造成定位階段進(jìn)行匹配時主要的誤差來源。在對信號強(qiáng)度的波動研究過程中,發(fā)現(xiàn)信號有一定范圍的波動,因此設(shè)計(jì)了KSRI算法來解決錯誤匹配的問題,從而提高定位的性能。
3基于KSRI的定位算法
與傳統(tǒng)的指紋定位系統(tǒng)一樣,基于KSRI算法的定位系統(tǒng)也分為離線測試階段和在線定位階段。
離線測試階段與傳統(tǒng)的方法主要有2個不同點(diǎn):該系統(tǒng)的指紋地圖是通過開發(fā)的指紋地圖管理軟件來進(jìn)行,在每個參考點(diǎn)測量指紋信息之后,自動保存在軟件的數(shù)據(jù)庫里;傳統(tǒng)的指紋是選取接受到的信號強(qiáng)度作為指紋信息,但是該系統(tǒng)是采用每個參考點(diǎn)的最強(qiáng)信號的K個接入點(diǎn)作為指紋特性,該階段是通過指紋地圖管理軟件來實(shí)現(xiàn)。
在定位階段,在待測點(diǎn)檢測到信號強(qiáng)度后,選取里面最強(qiáng)信號的K個接入點(diǎn)與新建的指紋地圖I匹配來達(dá)到定位的目的,該階段是通過室內(nèi)定位軟件來實(shí)現(xiàn),系統(tǒng)定位流程如圖2所示。
在匹配指紋地圖過程中,用KSRI算法來獲取最佳位置估計(jì)。KSRI算法通過對比實(shí)時檢測到的最強(qiáng)信號的接入點(diǎn)與指紋地圖I中對應(yīng)的接入點(diǎn)進(jìn)行對比,如果最強(qiáng)信號的K個接入點(diǎn)完全一樣,那么對所有符合要求的參考點(diǎn)對應(yīng)的坐標(biāo)取平均值,即可以估算出待測點(diǎn)的位置信息。如果K個接入點(diǎn)不全部相同,那就取最大相同個數(shù)的接入點(diǎn)對應(yīng)的坐標(biāo)來估算待測點(diǎn)位置。算法的偽代碼如下:
輸入:指紋地圖I,實(shí)時檢測到的指紋信息Indexω
輸出:最佳位置估計(jì)
1.int count=0; 新建鏈表list;
2.for 0 to I.size
3.for 1 to Indexω.size
4.if Indexj==Indexω then
5.count++
6.把指紋地圖I中所有符合要求的APj存入list;
7.end if
8.end for
9.end for
10.對list中所有AP對應(yīng)的坐標(biāo)取平均值,即最佳位置估計(jì)
4系統(tǒng)軟件設(shè)計(jì)
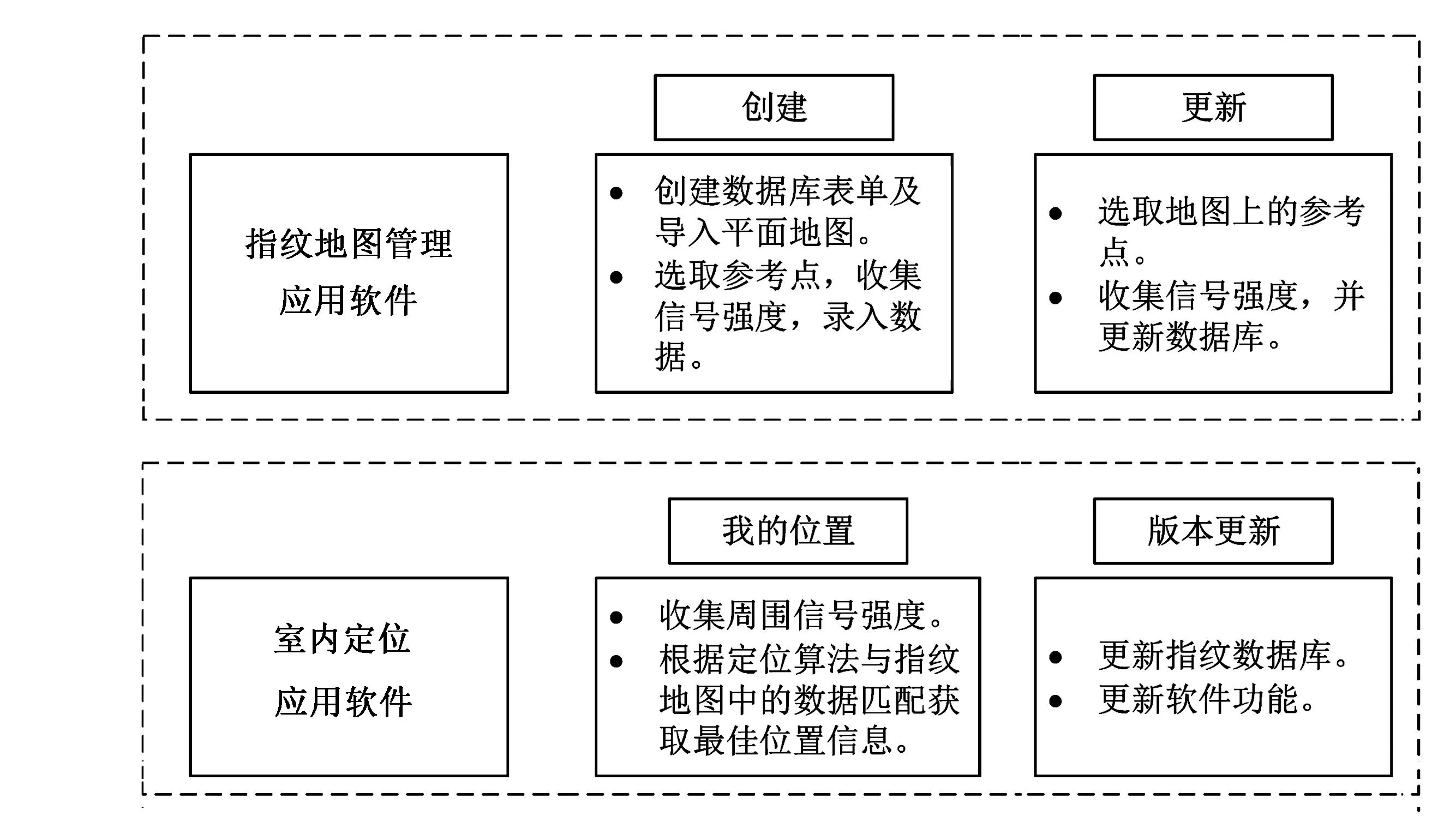
圖3 軟件設(shè)計(jì)
系統(tǒng)的軟件主要包括指紋地圖管理軟件和室內(nèi)定位軟件(見圖3)。指紋地圖管理軟件是通過軟件智能地建立指紋數(shù)據(jù)庫,可以大量減少的人工成本,提高指紋地圖的創(chuàng)建效率。其主要包括創(chuàng)建指紋地圖和更新指紋地圖2個功能。創(chuàng)建指紋地圖是在一個新的室內(nèi)環(huán)境中,通過該軟件可以高效的建立一個指紋數(shù)據(jù)庫;更新指紋地圖功能是在已有的指紋地圖的基礎(chǔ)上,選取部分點(diǎn)來更新指紋數(shù)據(jù),由于環(huán)境的變化,可能只是部分參考點(diǎn)的指紋信息有所變化,而不需要重建整個指紋地圖。
室內(nèi)定位軟件是KSRI定位算法的實(shí)現(xiàn)的載體,用戶安裝了軟件就可以在室內(nèi)環(huán)境中實(shí)現(xiàn)定位的功能。其主要通過實(shí)時接收到的指紋信息匹配指紋地圖來達(dá)到定位的目的。“我的位置”是實(shí)現(xiàn)更新定位位置的功能,隨著手機(jī)的移動,位置信息不斷的更新。“版本更新”是更新軟件的數(shù)據(jù)庫、地圖和新添加的功能。
5系統(tǒng)性能測試
為了驗(yàn)證筆者提出的基于KSRI算法的室內(nèi)定位系統(tǒng),選取了一棟5層的成“工”字行的建筑,在5層的區(qū)域里面總共部署了40個ARUBA AP-115的無線接入點(diǎn)。在整棟樓的走廊上選取了89個指紋參考點(diǎn),整個試驗(yàn)過程中使用三星GALAXY SIII手機(jī)作為定位終端,手機(jī)安裝了開發(fā)的指紋地圖管理軟件和室內(nèi)定位軟件。
針對該試驗(yàn)環(huán)境和數(shù)據(jù),對KSRI算法與NN(nearest neighbor)和KNN(K-Nearest Neighbor)算法進(jìn)行了對比。在對比過程中,選取了4樓的22個參考點(diǎn)的880個數(shù)據(jù)作為研究對象。NN算法只選取接收到的所有信號強(qiáng)度中最強(qiáng)的一個與指紋地圖Ω進(jìn)行匹配。由于每個參考點(diǎn)可以接受的AP是有限的,整棟樓只安裝了40個AP(Access Point),所以選取K=3來研究KNN算法的定位精度。在選取3個最強(qiáng)的信號之后,每個信號分別與指紋地圖中的對應(yīng)AP的信號進(jìn)行匹配,再選取3個最近鄰,然后對9個信號對應(yīng)的參考點(diǎn)取交集,最后對交集里面參考點(diǎn)對應(yīng)的坐標(biāo)取平均值來得到最終的定位結(jié)果。為保證公平起見,在KSRI算法中,同樣取K=3來評估定位的性能。
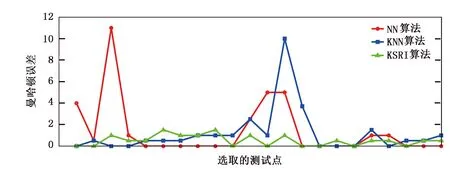
圖4 3種不同算法的曼哈頓定位誤差
由3種算法的曼哈頓定位誤差、平均誤差和方差對比(見圖4、圖5、圖6)可知,KSRI算法的曼哈頓定位誤差值小且最穩(wěn)定,平均定位誤差和定位誤差方差的值最小,表明KSRI算法在定位精度和定位的穩(wěn)定性上均優(yōu)于NN和KNN算法。
從獲得信號強(qiáng)度大小排序之后,筆者對3種的算法進(jìn)行了計(jì)算量的估計(jì),以1次數(shù)據(jù)匹配定義為1個計(jì)算量,在該試驗(yàn)中,同樣選取了4樓的22個參考點(diǎn)作為研究目標(biāo),對比結(jié)果(見圖7)表明,在22次定位過程中,KSRI的計(jì)算量居中,略高于NN。
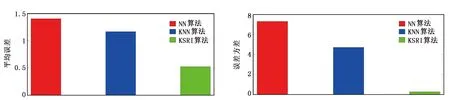
圖5 3種不同算法的平均定位誤差 圖6 3種不同算法的定位誤差方差
綜合定位精確度、定位穩(wěn)定性和計(jì)算量,很明顯KSRI算法取得了最佳的性能,這為室內(nèi)定位軟件的實(shí)現(xiàn)提供了重要的支撐。
6結(jié)語
筆者設(shè)計(jì)并實(shí)現(xiàn)了基于KSRI算法的室內(nèi)定位系統(tǒng),相對于傳統(tǒng)的NN和KNN算法定位精確度和穩(wěn)定性得到了很大的提高,同時也保證了較低的計(jì)算量。針對提出的KSRI算法,開發(fā)了相應(yīng)的手機(jī)應(yīng)用軟件:指紋地圖管理軟件和室內(nèi)定位軟件。開發(fā)的軟件不僅能很方便的創(chuàng)建新的指紋地圖,同時也可以容易的獲得精確的室內(nèi)位置信息。試驗(yàn)測試表明,基于KSRI算法的室內(nèi)定位系統(tǒng)可以很好的解決室內(nèi)的定位問題,不需要增加額外的硬件設(shè)備,具有很大的使用價值和應(yīng)用前景。
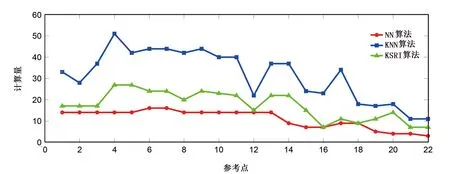
圖7 3種不同算法的計(jì)算量
[1]Bulusu N,Heidemann J,Estrin D. GPS-less low-cost outdoor localization for very small devices[J]. Personal Communications,IEEE,2000,7(5): 28~34.
[2] Zandbergen P A. Accuracy of iPhone locations: A comparison of assisted GPS, WiFi and cellular positioning[J]. Transactions in GIS,2009,13(s1): 5~25.
[3] Filonenko V,Cullen C,Carswell J. Investigating ultrasonic positioning on mobile phones[A].Indoor Positioning and Indoor Navigation (IPIN),2010 International Conference on IEEE[C].2010: 1~8.
[4] Shahi A,Aryan A,West J S,et al. Deterioration of UWB positioning during construction[J]. Automation in Construction,2012(24): 72~80.
[5] Lee C, Chang Y, Park G,et al. Indoor positioning system based on incident angles of infrared emitters[A]. IECON 2004 30th Annual Conference of IEEE[C].2004: 2218~2222.
[6] Li Shuai,Lou Yue-sheng,Liu Bo. Bluetooth aided mobile phone localization: a nonlinear neural circuit approach[J]. ACM Transactions on Embedded Computing Systems (TECS),2014,13(4): 78.
[7] Montaser A,Moselhi O. RFID indoor location identification for construction projects[J]. Automation in Construction,2014(39): 167~179.
[8] Luo H L. ZigBee-based intelligent indoor positioning system soft computing[J]. Soft Computing, 2014,18(3): 443~456.
[9] Chung J,Donahoe M,Schmandt C,et al. Indoor location sensing using geo-magnetism[A].Proceedings of the 9th international conference on Mobile systems, applica-tions,and services,ACM[C].2011: 141~154.
[10] Chen Yin, Lymberopoulos D,Liu Jie,et al. Indoor localization using FM signals[J]. Mobile Computing,IEEE Transactions on,2013,12(8): 1502~1517.
[11]聶爾豪,于重重,蘇維均,等. WiFi 實(shí)時定位算法研究[J]. 計(jì)算機(jī)應(yīng)用研究,2014,31(7):2164~2168.
[12] Ficco M,Esposito C,Napolitano A. Calibrating Indoor Positioning Systemswith Low Efforts[J]. Mobile Computing,IEEE Transactions on,2014,13(4): 737~751.
[13] Jaffe A,Wax M. Single-Site Localization via Maximum Discrimination Multipath Fingerprinting[J]. IEEE Transactions on Signal Processing,2014,62(7): 1718~1728.
[14] Milioris D,Tzagkerakis G,Papakonatantinou A,et al. Low-dimensional signal-strength finger-print-based positioning in wireless LANs[J]. Ad hoc networks,2014,12: 100~114.
[15] Garcia-Valverde T,Garcia-Solala,Hagras H,et al. A fuzzy logic-based system for indoor local-ization using WiFi in ambient intelligent environments[J]. Fuzzy Systems,IEEE Transactions on,2013,21(4): 702~718.
[編輯]辛長靜
[文獻(xiàn)標(biāo)志碼]A
[文章編號]1673-1409(2016)07-0067-05
[中圖分類號]TP391;TP302.1
[作者簡介]楊鵬(1976-),男,碩士,講師,現(xiàn)主要從事計(jì)算機(jī)應(yīng)用方面的教學(xué)與研究工作;E-mail:wzypyp@163.com。
[基金項(xiàng)目]湖北省自然科學(xué)基金項(xiàng)目(2014CFB188);湖北省中青年科技創(chuàng)新團(tuán)隊(duì)項(xiàng)目(T201410);溫州市2014年公益性科技計(jì)劃項(xiàng)目(G20140059)。
[收稿日期]2015-11-28
[引著格式]楊鵬,熊曾剛.基于WiFi的室內(nèi)定位系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)[J].長江大學(xué)學(xué)報(bào)(自科版),2016,13(7):67~72.