民用飛機模擬飛行軟件研究
2016-05-14 08:42:28曲小宇
軟件導刊 2016年7期

摘要:在經典飛行仿真技術研究的基礎上,利用虛擬現實技術的相關理論,結合民用飛機模擬飛行的特點,建立精確的飛行仿真系統,為飛機設計的動態驗證提供重要的技術支持。首先對飛行仿真系統功能進行了分析說明,然后從飛機非線性模型設計、流程設計和軟件管理三方面重點剖析了飛行仿真系統的軟件設計,最后研究了飛行仿真系統的軟件接口設計。
關鍵詞關鍵詞:民用飛機;飛行仿真;仿真軟件設計
DOIDOI:10.11907/rjdk.161727
中圖分類號:TP319文獻標識碼:A文章編號文章編號:16727800(2016)007011503
0引言
飛行仿真是把飛機假設為剛體的運動情況作為研究對象、面向復雜系統的仿真。以飛機的飛行力學和飛行控制理論為依據,通過Matlab/Simulink建立數學模型,并以此模型為基礎進行模擬飛行試驗與驗證分析研究。飛行仿真系統是一個軟件仿真系統,數學仿真模型覆蓋所模擬對象的工作過程,包括從發動機啟動之前直到發動機停車之后的所有飛機特性,以及因環境條件變化所引起的正常延遲效應,同時也對系統故障進行仿真[13]。
本文對民用飛機飛行仿真軟件系統進行了研究,基于飛行仿真系統功能,對飛行仿真軟件設計、流程和管理進行了分析,并對飛行仿真軟件接口設計進行了剖析。飛行仿真系統通過飛機的相關數據建立動力和運動學模型,并利用驗證數據完成整個系統逼真度驗證。
本文基于Cult3D三維建模仿真技術,采用AngularJS框架,對面向B/S架構的車輛維修教學仿真系統設計與實現方法進行了探究。與傳統車輛教學仿真軟件相比,本系統基于B/S結構,有效解決了傳統教學仿真軟件維護升級困難的問題。通過采用AngularJS框架對前端代碼進行組織與開發,提高了前端代碼的可復用性與可維護性,極大減輕了服務器端的壓力。本文探討的系統目前已投入市場使用,運行效果良好。系統實現效果如圖 4所示。
鑒于Cult3D技術目前已經不再提供技術支持,且與Google Chrome等現代瀏覽器兼容性不好等問題,如何選擇新的Web3D技術,實現適應現代瀏覽器技術發展的三維車輛維修教學仿真軟件是后續研究的重點。
飛行仿真系統主要功能是:通過把飛機作為物理實體進行數學描述,模擬飛機的本體特性,實時計算飛機的運動參數,基本功能包括以下幾個方面:① 對飛行任務剖面的飛行狀態進行模擬;②模擬飛機在全包線、包線邊界附近的飛行狀態;③對飛機發生故障后的降級狀態進行模擬;④對飛機在受外界擾動下的飛行狀態進行模擬;⑤模擬典型的故障功能。
飛行動力學仿真模塊是飛行仿真系統的核心,該模塊基于剛體運動方程和繞質點轉動方程,用于模擬飛機在空中和地面上的全部運動特性。模擬飛行系統中其它仿真系統如飛行控制、液壓、動力、航電等仿真模塊的輸出結果,都會輸入給飛行仿真系統進行綜合計算,以實現對飛機運動的控制。具體功能需求如下:
(1)通過計算駕駛員操縱飛機后,飛行控制、動力和液壓等系統對飛機氣動模塊的影響,實時解算出飛機飛行狀態(飛行速度、飛行高度、飛行姿態、飛機構型等)和飛行位置(機場的坐標、經緯度),并通過駕駛艙儀表、視景系統實時反饋給駕駛員操縱和視覺感受,以便駕駛員在環評估。
(2)輸出姿態角(俯仰、滾轉和偏航)、氣流角(迎角、側滑角)、高度、速度等關鍵飛行參數給飛行控制系統,用于飛控計算機對飛機操縱面、油門指令的實時解算。
(3)系統初始化:用于對飛行狀態、飛行條件和故障注入的設置和初始化,包括:飛行狀態、飛行終止、飛行構型(襟縫翼位置、重量重心等)、大氣環境、機場環境和大氣擾動(紊流、陣風和風切變)。
2飛行仿真軟件系統設計
2.1非線性飛機模型設計
飛機非線性模型是以飛行動力學仿真模塊進行動力學計算,并把反映當時飛機位置和飛行狀態的各種參數提供給其它相關的仿真系統。飛機全量運動方程組為六自由度非線性動力學模型的通用表達式,可用來計算最一般的情形(包括非對稱、有風/無風、大擾動等情形)。
為便于描述,在滿足工程應用需求的前提下,進行了如下假設:①平面大地(忽略地球的曲率和自轉);②剛體飛機(不考慮旋轉部件的影響,不考慮動氣彈效應,僅在氣動力模型中作靜氣彈修正)。
此外,是否考慮飛機質量、重心等隨時間的變化,可按照具體仿真計算情形確定。
2.1.1動力學模型設計
基于地面慣性參考系,根據牛頓第二定律,對飛機在合外力F和合外力矩M作用下分別建立線運動和角運動方程。
在合外力作用下,飛機的線性運動方程為ΣF=ddt(mv)(1)在合外力矩作用下,飛機的角運動方程為ΣM=ddt(L)(2)在機體坐標軸系中確定剛體飛機在所受外力和力矩下的平動和轉動規律,詳見公式(3)和(4)。m(k+qwk-rvk)=TcosφT-Dcosαcosβ-Ycosαsinβ
1.2運動學模型設計
在地面坐標軸系中確定飛機在空間的運動軌跡和姿態變化規律,詳見公式(5)和(6)。g=ukcosθcosψ+vk(sinφsinθcosψ-cosφsinψ)
(6)飛行仿真系統的軟件設計基于假設的剛體運動學方程和繞質心轉動方程,實現對真實飛機在空中和地面飛行運動特性的全面模擬。
2.2飛行仿真軟件流程設計
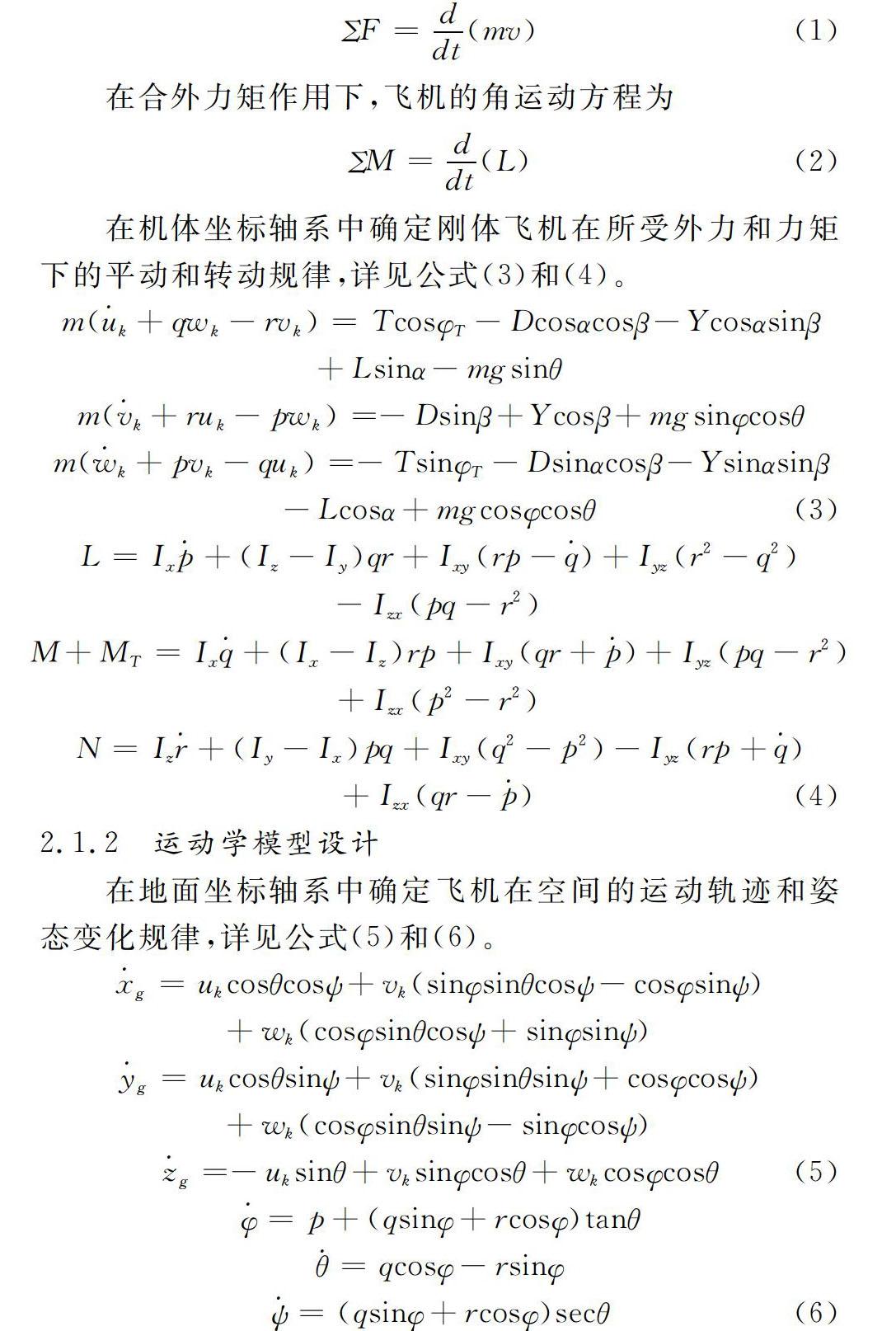
飛行仿真系統的軟件設計主程序按照邏輯控制關系,以一定的順序調度飛行仿真系統內部各功能模塊,實現飛行仿真系統內部各功能和真實飛機性能的模擬。飛行仿真系統的軟件主程序運行流程見圖1。
2.3飛行仿真軟件管理
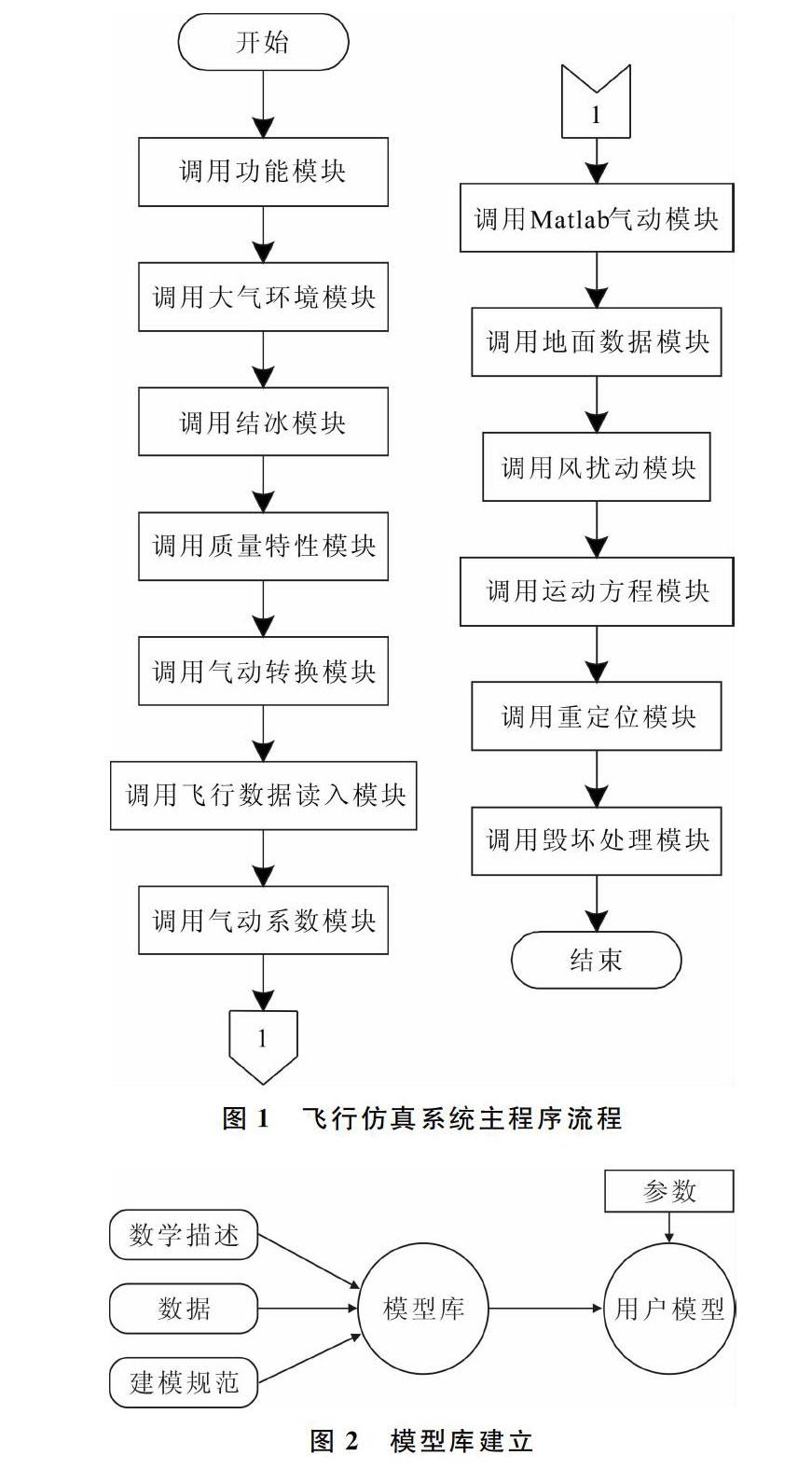
飛行仿真軟件管理用于規范仿真模型標準、版本變更和升級流程,管理仿真模型功能及接口,以確保飛行仿真系統的正常運行,主要包括:①建立建模規范,實現模型和數據的標準化;②建立全功能、全包線、多形式、多用途的模型庫,如圖2、圖3和圖4所示;③仿真參數設置:包括仿真步長、解算方法、仿真時間、時間因子、仿真數據在線監控步長、仿真科目、仿真模型初值、飛行場景等設置;④仿真流程控制:包括仿真的啟動、暫停、停止、單步運行、編譯、仿真代碼分配、仿真代碼下載等功能;⑤仿真數據記錄、處理與分析;⑥自動批量仿真:包括蒙特卡羅仿真、自動批量腳本仿真等;⑦仿真數據在線監控:包括實時仿真數據在線監控、實時計算機CPU、內存的狀態監控等;⑧建立模型庫管理體制,包括版本管理、模型關系管理、模型測試管理、模型文檔管理等。
3軟件接口設計
民用飛機的模擬飛行系統利用逼真的飛行環境,通過駕駛員的操縱指令,觀察駕駛艙里的顯控設備和儀表,感受真實視景和音響模擬來評價飛行性能和操縱品質。
模擬飛行系統功能復雜,除了核心的飛行仿真系統,還有飛行控制仿真系統、航空電子仿真系統、駕駛艙操縱設備仿真系統、視景仿真系統、音響仿真系統、運動系統和工程師平臺等。飛行仿真系統與其它系統均存在交聯關系,需要對軟件接口進行設計,接口原理見圖5。
接口類型主要包括AD、USB、開關量等,用于與其它仿真模型或硬件的接口驅動與數據交換。網絡類型主要包括以太網或反射內存網等,用于計算機之間的網絡連接與數據交換。
4結語
本文研究了民用飛機模擬飛行仿真系統,重點對飛機級的主飛行仿真系統功能進行了詳細說明;對飛行仿真軟件系統組成進行了剖析,詳細研究了軟件系統模塊和功能,研究了飛行仿真系統的軟件接口。基于此功能軟件系統所設計的民用飛機飛行模擬仿真系統,能夠為駕駛員提供逼真的飛機六自由度運動學和動力學模擬,實時在高保真飛行狀態和飛行環境下操縱飛機,可為駕駛員模擬飛機的真實飛行提供技術保證。
參考文獻:
[1]王行仁.飛行實時仿真系統及其技術[M].北京:科學出版社,1985.
[2]曲小宇.模擬器飛行仿真系統研究[J].軟件導刊,2014,13(9):9596.
[3]童中翔,王曉東.飛行仿真技術的發展與展望[J].飛行力學,2002,20 (3):58.
責任編輯(責任編輯:杜能鋼)
參考文獻:
王鈺.基于Cult3D的摩托車虛擬展示系統的設計與實現.北京:北京工業大學,2014.
馮桂珍,邢海軍.基于Cult3D的虛擬土木工程實驗平臺的構建[J].實驗技術與管理,2015(7):109112.