基于MissionPlanner的無人機智能搜救系統設計
2016-05-30 18:15:22解振華
科技尚品 2016年3期
解振華
摘 要:我們通過飛行任務規劃系統來確定化學危險源的范圍,再通過機械視覺和嗅覺采集現場信息并與預先值進行比對確定危險的位置,最后無人機通過工作人員攜帶GP發射模塊對工作現場進行跟蹤拍攝,將情況發送地面站,供指揮再決策,從而形成閉合的智能搜救系統。
關鍵詞:開源地面站;無人機;智能;搜救
0 引言
天津特大爆炸案是所有人心中揮之不去的陰霾。隨著無人機技術的不斷成熟發展,無人機在諸如化學物品爆炸泄漏等危險現場的搜救過程中發揮著日益重要的作用。傳統上我們主要采用人為控制的無人機方法進行偵察,但是存在以下幾個問題:
(1)由于飛手在場外,又不熟悉搜救環境,很容易對搜救路線產生判斷失誤;
(2)飛手往往采取第一視覺飛行,視野會受到限制,無法發現掩蓋在廢墟下的危險品;
(3)飛手的專業素質、精神壓力、搜救經驗都對搜救活動產生不同程度的影響。
本文將探求以MissionPlanner開源地面站為平臺,建立一款新型智能自主的搜救系統,具有高度自主,操作簡單,價格低廉等特點。
1 基于MissionPlanner內容的任務規劃模塊
MissionPlanner是APM開源地面站,具有強大的二次開發性能。對于在災難現場搜救的問題,我們可以利用MissionPlanner的任務規劃系統在地圖上方便地標記需要偵察的危險點,并可以在各個巡查點設定無人機的飛行高度、飛行狀態、懸停時間等。通過這些巡查點便能夠將危險源的范圍圈定出來,進而確定無人機需要巡查路線,使得搜救指揮決策更為順暢。
2 機械視、嗅覺信息智能采集處理模塊
當無人機在災害現場進行巡查,會面對不同位置的危險物:
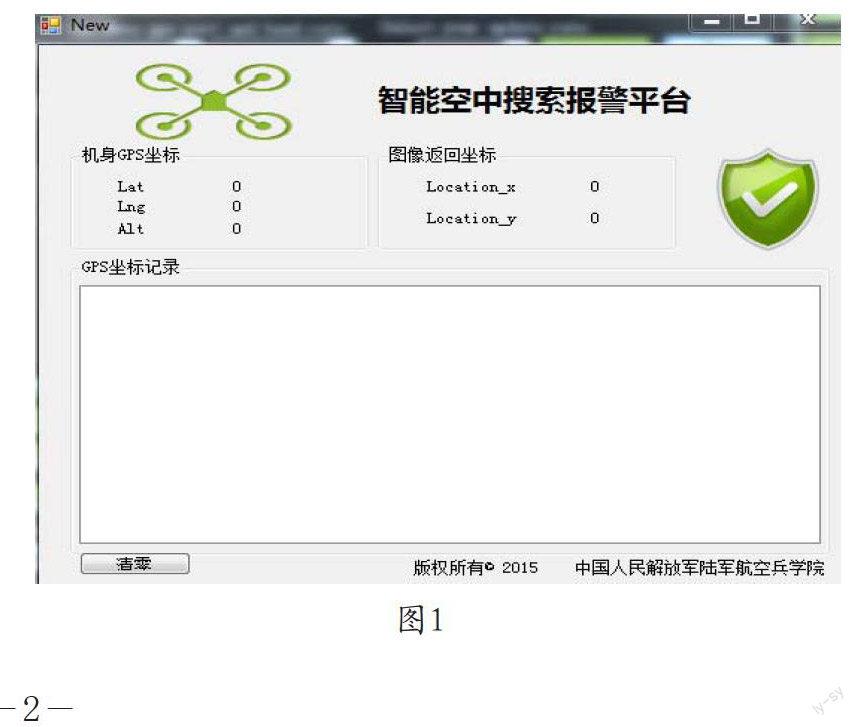
(1)對于地表的危險物,通過機載的攝像頭不斷采集現場的圖像,并將圖像發到地面站不斷進行圖像匹配識別,若與事先確定的危險源相配對,無人機便會將危險源的GPS坐標回傳地面智能報警平臺上(圖1),報警平臺也會相應的進行報警。
(2)對于地表以下的危險源,我們可以通過嗅覺傳感器對空氣中揮發的化學氣體濃度進行比對識別,若濃度高于設定值,同樣會將危險源坐標傳到地面報警平臺。平臺會將收到的GPS坐標記錄下來,供接下來地面人員進入現場進行專業處理。
3 GPS實時跟蹤模塊
發現化學危險源的位置后,工作人員可以進入現場對危險源進行處理了。這時候我們的地面人員可以攜帶配有GPS發射器的無人機實時跟蹤模塊進入現場。通過數傳模塊將GPS接收器接受的人員所處位置的GPS坐標不斷地發給無人機,無人機則會根據得到的坐標對工作人員實時跟蹤,并將工作現場的情況發送到地面站,為指揮人員提供分析決策的依據。
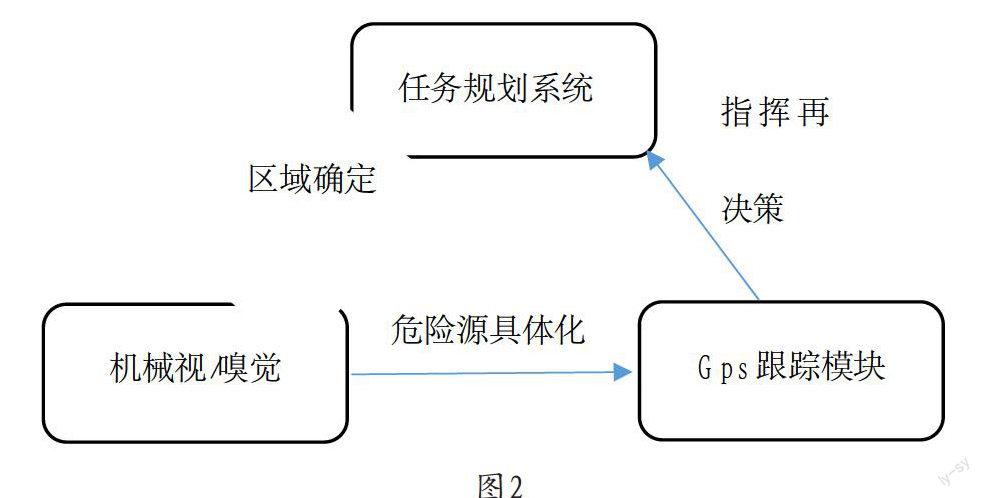
基于以上3個模塊我們就基本構建了一個基于MissonPlanner地面站的無人機智能搜救系統(圖2)。我們通過飛行任務規劃系統來確定化學危險源的范圍,再通過機械視覺和嗅覺采集現場信息并與預先值進行比對確定危險的位置,最后無人機通過工作人員攜帶GPS發射模塊對工作現場進行跟蹤拍攝,將情況發送地面站,供指揮再決策,從而形成閉合的智能搜救系統。
4 總結
本文探討了通過以開源地面站MissionPlanner為基礎,編寫了地面報警平臺,并融合了圖像匹配、氣味對比等機械智能算法,構建閉環控制的無人機搜救系統。能夠克服傳統依賴飛手進行搜救帶來的時間長、誤差大、成本高的缺點,對無人機參與復雜情況的搜救活動具有啟發作用。
參考文獻
[1]臧克,孫永華,李京,等.微型無人機遙感系統在Hazus-MH汶川地震中的應用[J].自然災害學報,2010,(3):162-166.
[2]洪亮,周志城,方敏,等.低空無人機行攝平臺的探索與實踐[J].繪制地理信息,2013,38(3):77-79.
(作者單位:陸軍航空兵學院)
猜你喜歡
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26