自動扶梯防逆轉保護措施分析
2016-05-30 15:04:22白植志
中國高新技術企業 2016年21期
摘要:自動扶梯逆轉是指自動扶梯在運行的過程中,非人為原因出現運動方向改變的情況。文章根據自動扶梯逆轉情況,對自動扶梯工作原理和分類進行了介紹,并對自動扶梯運行過程中持續逆轉風險的主要原因進行了探討,提出了自動扶梯防逆轉保護措施。
關鍵詞:自動扶梯;防逆轉;保護措施;逆轉事故;電氣因素;機械裝置 文獻標識碼:A
中圖分類號:TH236 文章編號:1009-2374(2016)21-0073-02 DOI:10.13535/j.cnki.11-4406/n.2016.21.035
自動扶梯逆轉主要指的是自動扶梯在運行的過程中,非人為原因出現運動方向改變的情況,自動扶梯在上行或者是下行的時候都可能會發生逆轉的情況。自動扶梯逆轉事故中,出現逆轉概率最高的情況為自動扶梯上行時,且在滿載運行的狀況下。自動扶梯上行且滿載運行的時候,如果發生逆轉就會導致非常嚴重的后果。自動扶梯安全事故中,導致危害程度最大的類型就是出現逆轉現象,會引起比較嚴重的踩踏、擠壓和跌落
事故。
1 自動扶梯工作原理和類型
自動扶梯是一種固定的電力驅動裝置,能夠循環運行,可以向上或者是向下傾斜為乘客提供運輸服務,主要的構成部分包括安全保護裝置、控制裝置、扶手系統、梯路系統和驅動裝置,是一種機電一體化的機器設備。自動扶梯根據驅動裝置的安裝位置,分中間驅動和端部驅動,比較普遍的是端部驅動,它的驅動系統主要包括五個部分,即驅動、傳動鏈條、制動器、減速器和電動機。驅動主軸工作的時候,主要是依靠傳動鏈條來實現,主軸上面的梯級鏈條和牽引鏈輪將動力傳輸給梯級。向扶手膠帶傳遞動力的主要是依靠扶手驅動輪實現,扶手系統和梯路系統為乘客提供扶手和站立。依據自動扶梯的功能來設置控制系統,從而實現對自動扶梯的全面管理。在自動扶梯可能發生安全隱患的時候,安全保護設備會起到較好的作用,能夠阻止扶梯繼續運行。自動扶梯如果按照承載和使用情況來進行劃分,可以分為公共交通型和普通型兩種類型。
2 自動扶梯逆轉的原因
2.1 電氣因素
自動扶梯工作的時候,假如電網出現失壓、斷相或者是錯相的情況都有可能導致驅動力矩不足或者是電機出現反轉,此時自動扶梯在上行時就會出現逆轉的現象,這樣的狀況比較易于發生在自動扶梯滿載上行的狀態下。控制系統裝置或者是低壓元件一旦發生短路或者是斷路的情況,自動扶梯控制系統就無法發揮有效作用,就會導致自動扶梯出現逆轉的情況。
2.2 機械裝置
機械裝置失效導致的逆轉現象比較復雜。自動扶梯的零件出現損耗以后,會導致扶梯在運行的時候發生異常情況,比如動力全失或者是不足,進而導致自動扶梯出現逆轉的情況。如果傳動裝置或者驅動裝置一旦發生斷裂、松動的情況,都會導致自動扶梯出現動力缺失或者不足,從而造成自動扶梯出現逆轉。制動裝置的部件在生產、安裝或者運輸的時候,一旦發生嚴重磨損,就會導致部件不符合使用標準,從而使自動扶梯在運行的時候出現問題,進而造成自動扶梯出現逆轉的情況。除此以外,自動扶梯在運行的時候,一旦發生超載的情況,就會使逆轉的幾率不斷上升,自動扶梯的危險系數也會跟著不斷升高,自動人行道和扶梯傾角的夾角不斷增加,也會導致逆轉危險系數不斷升高。
3 自動扶梯防逆轉保護方法
3.1 電氣裝置
電氣裝置發生如下故障以后,假如沒有辦法進行排解,可能會給自動人行道和自動扶梯造成危險故障:(1)電壓下降;(2)電壓消失;(3)中斷導體;(4)電路接地出現問題;(5)晶體管、電容器以及電阻器等元件出現斷路或者是短路,導致功能或者是參數值發生變化;(6)繼電器或者是接觸器的可動銜鐵不能較好閉合;(7)繼電器或者是接觸器的可動銜鐵不能較好地斷開;(8)觸點不能較好斷開;(9)觸點不能較好閉合。
3.2 零部件
自動人行道和自動扶梯的所有零部件必須要滿足以下要求:(1)電氣和機械的結構一定要合理,尺寸符合設計要求,使用的制作材料要滿足強度要求;(2)做好維修保養工作,當零部件磨損達到一定程度的時候,一定要及時地對零部件進行更換。
3.3 驅動傳動裝置
使用非摩擦元件來連接膠帶、踏板或梯級驅動裝置和工作制動器,比如可以使用兩根以上的單根鏈條、多排鏈條、齒輪和軸等。
3.4 膠帶、踏板以及梯級的驅動裝置
對于踏板和梯級的鏈式驅動裝置來說,必須要滿足如下要求:需要使用兩根以上的鋼質鏈條來對梯級進行驅動,梯級的兩側要確保有一根鏈條存在,每根鏈條的安全系數要保持在5以上;對于膠帶的滾筒驅動來說,一定要滿足如下要求:膠帶接頭和膠帶的安全系數要大于5。當膠帶、踏板和梯級驅動形式的安全系數和運行功能與上述的所有規定相吻合以后,可以使用其他的驅動方式來進行工作。
3.5 工作制動器
對自動人行道和自動扶梯加設工作制動系統,使其具有勻減速的停止過程,同時滿足停止狀態的工作制動要求。在制動系統動作的時候,不得出現延遲的情況。當控制電路失電或者是動力電源失電的時候,制動系統應立即動作。
3.6 非操縱逆轉保護裝置
自動扶梯應設置非操縱逆轉保護裝置,當膠帶、踏板和梯級的運行方向突然發生改變的時候,就會自動停止進行。
3.7 附加制動器
3.7.1 傾斜式自動人行道和公共交通型自動扶梯應設置附加制動器,一般在膠帶、踏板或者是梯級驅動系統的非摩擦元件上設置附加制動器,其中單根鏈條不可以被當作是非摩擦元件。首先,膠帶、踏板或者是梯級驅動輪與制動器之間應優先選用非摩擦傳動原件,如使用兩根或兩根以上的單排鏈條、多排鏈條、齒輪和軸進行相互連接;其次,工作制動器不可以使用非機-電式制動器;最后,傾斜式自動人行道的有效區段要保持在40m,自動扶梯的高度要保持在6m。
3.7.2 對于傾斜式自動人行道和公共交通型自動扶梯來說,當傾斜式自動人行道的有效區段低于40m,自動扶梯的高度小于6m的時候依然需要加設附加制
動器。
3.7.3 擁有制動載荷的自動人行道或者是自動扶梯在加設附加制動器以后,可以使其速度得到有效的減速停止。
3.7.4 最好使用機械式的附加制動器。
3.7.5 在速度高出額定速度1.4倍以前或者是膠帶、踏板以及梯級規定的運行方向被改變的時候,附加制動器可以較好地發揮作用,在動作剛要進行的時候,控制電路應強制斷開。
3.8 額定速度與傾斜角度
自動扶梯額定速度與傾斜角度之間的要求主要表現為如下兩點:(1)傾斜角度為30°的時候,額定速度應該保持在0.7m/s;(2)傾斜角度大于30°且小于35°的時候,額定速度應該保持在0.5m/s,自動扶梯運輸的人數不可以超出設計的標準。
4 充分發揮驅動裝置,保護裝置和附加制動器的作用
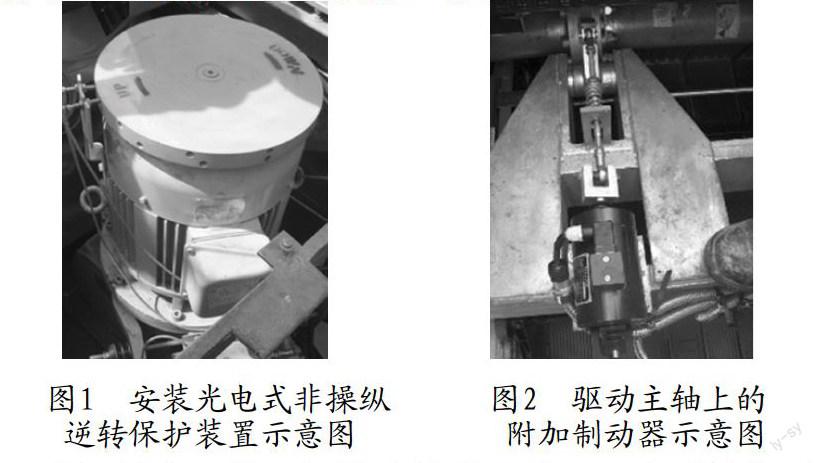
驅動裝置的主要構成部分包括工作制動器在其中,工作制動器是在減速器和電機中間進行安裝的,有時也會安裝在蝸桿軸或者是電機軸的末端。制動方式主要表現為三種形式,即盤式制動、軟抱閘帶式制動和塊式制動。非操縱逆轉保護裝置通常安裝在梯路或者是驅動裝置上,主要包括兩種形式,即光電式防逆轉和機電式防逆轉,詳見圖1所示。信號傳感設備檢測到非操作性逆轉信號的時候,會將電源進行斷開,借助附加制動器和工作制動器來停止自動扶梯運行。
附加制動器使用機械式的效果最好,當逆轉信號或者是超速信號被監測元件監測到以后,機械動作元件就會被觸發,從而使自動扶梯停止運行。通常情況下,會在主軸或者是梯級鏈輪上安裝附加制動器,詳見圖2
所示。
5 結語
受多種原因的影響,自動扶梯會出現逆轉的現象,要想對自動扶梯逆轉現象進行較好的控制,防止出現安全事故,一定要嚴格按照如下標準來進行操作:在扶梯安裝和制作的過程中,嚴格按照有關標準進行操作;維修保養部門需要嚴格按照說明書進行維修保養;檢測機構一定要嚴格按照有關標準進行認真檢測;政府部門要將宏觀調控作用發揮好;乘客在使用自動扶梯的時候,一定要按照有關標準進行使用。
參考文獻
[1] 孫為明,馮興剛,林燕,等.自動扶梯逆行故障成因與分析[J].中國電梯,2011,22(9).
[2] 自動扶梯和自動人行道的制造和安裝安全規范(GB16899-2011)[S].北京:中國標準出版社,2011.
[3] 呂英輝.自動扶梯或傾斜式自動人行道的防逆轉保護[J].中國科技信息,2010,(15).
作者簡介:白植志(1979-),男,浙江溫州人,溫州市特種設備檢測研究院助理工程師,研究方向:自動扶梯易發故障分析。
(責任編輯:王 波)
