基于沖壓發動機技術的遠程戰術導彈制導與控制發展綜述
2016-06-01 05:58:56馬立群段朝陽
航空兵器 2016年2期
馬立群,段朝陽
(中國空空導彈研究院,河南 洛陽 471009)
?
基于沖壓發動機技術的遠程戰術導彈制導與控制發展綜述
馬立群,段朝陽
(中國空空導彈研究院,河南 洛陽471009)
摘要:針對以沖壓發動機為動力的遠程戰術導彈,描述了其飛行過程與特點。從制導律設 計和控制律設計兩個方面,綜述了國內外相關技術的設計方法,論述了彈道優化技術、制導控制 一體化、針對目標機動的制導律、BTT 控制與速度控制技術的研究現狀,探討了沖壓發動機導彈 在制導控制方面的發展方向。
關鍵詞:沖壓發動機; 遠程導彈; 制導與控制; BTT 導彈; 一體化設計
0引言
遠程戰術導彈可以實現超視距打擊、 先敵發射,因此在空戰、 海戰、 防空反導方面都具有明顯的優勢,在現代戰爭中的地位日益重要。 為了使導彈射程增加,傳統的方法是加大單級火箭發動機,或采用多級火箭推力。 隨著沖壓發動機技術的發展,越來越多的導彈采用火箭與沖壓的混合動力裝置。 相比于火箭發動機,沖壓發動機具有體積小、 質量輕、 比沖大等特點,可以使導彈巡航速度更快、 射程更遠。 對于質量相同的導彈,采用沖壓動力方式比采用固體火箭的射程要大一倍之多,因此沖壓發動機被視作下一代空空導彈、 反艦導彈、 反輻射導彈的首選動力裝置[1]。
沖壓發動機出現于20世紀50年代,其最初的設計目的是應用于單級入軌飛行器、 遠程高速飛機與導彈。 60年代到80年代,整體式火箭沖壓發動機的研究進展飛速,雙用途燃燒室、 整體式助推發動機技術、 貧氧推進劑的研制均取得了重大突破,為后續在導彈上的廣泛應用奠定了基礎。 90年代至今,隨著高超聲速飛行器概念的提出與發展,作為其主要動力裝置的超燃沖壓發動機技術更是各軍事強國競爭的焦點。 目前,美、 俄、 法、 印等國都在發展適用于高馬赫數飛行器的超燃沖壓發動機。
除在研技術外,在國外,沖壓發動機已經在很多服役的導彈型號上得到應用,如歐洲多國研制的“Meteor”空空導彈、 俄羅斯的“SA-6”防空導彈、 美國的“GQM-163”反艦導彈等[2-3]。 以“Meteor”導彈為例,在制導控制方面,由于其升力彈體構型限制,導彈大部分飛行彈道都采用傾斜轉彎方式(BTT),在攔截點前很短的一段時間,機動模式轉為側滑轉彎方式(STT),以增加導彈的敏捷性[4]。 相比于國外,國內現役的以沖壓發動機為動力的導彈型號還不多見,多數還存在于理論研究階段。
本文針對以沖壓發動機為主要動力的遠程導彈,描述了導彈飛行的一般過程與特點,總結了國內外制導與控制研究發展現狀,分析了在制導與控制設計發展過程中的關鍵技術。
1飛行過程與特性
1.1沖壓發動機導彈飛行過程
對于以沖壓發動機為動力的導彈來說,導彈從載體上發射分離,首先需要以火箭發動機助推導彈使沖壓發動機達到轉級狀態; 隨后導彈繼續爬升至一定高度轉入平飛階段; 導彈的中段飛行主要是將導彈引導至導引頭可以工作的范圍之內; 在飛行末段,導彈導引頭開始工作(一般為雷達或紅外導引方式),感受目標源的信號,通過制導算法使導彈達到最后預測的攔截點。 與近程導彈采用單一制導方式不同,遠程導彈一般采用復合制導的方式。 在初始發射段,由于對精度沒有太多要求,一般采用程控制導,使導彈盡快脫離載體,達到一定的高度和速度; 中制導階段由于達不到導引頭的作用距離,導彈一般通過數據鏈接收數據,采用慣性制導方式將導彈引向目標,并配合GPS等方式加以校正保證制導精度; 在達到中末制導交班點后,導彈進入尋的制導模式,通過導引頭截獲的目標信息,將導彈引導至制導律解算出的攔截點處,對目標實現有效毀傷。 一般遠程沖壓發動機導彈的飛行過程如圖1所示。
1.2沖壓發動機導彈飛行特點
結合導彈的飛行過程與發動機特性,可以看出遠程沖壓發動機導彈具有以下幾個顯著特點:
(1) 多約束。 沖壓發動機導彈具有嚴格的飛行狀態限制,要滿足多個狀態約束,包括法向過載限制、 巡航高度限制、 巡航速度限制、 迎角與側滑角限制等。 同時,為實現導彈的最佳作戰性能,要盡量考慮最短飛行時間、 最遠射程、 最省燃料等指標最優。 在中末制導交班處,還要考慮導彈的入射角、 飛行速度、 飛行姿態。
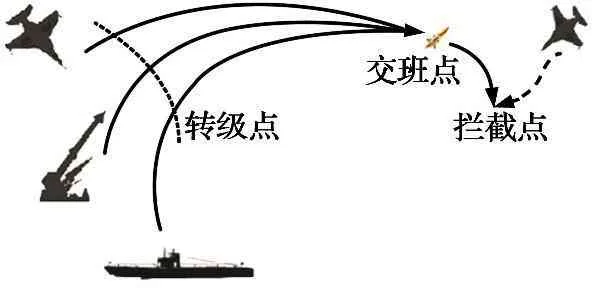
圖1遠程導彈飛行過程
(2) 多耦合。 沖壓發動機導彈多見于面對稱構型,適用于BTT控制,因此會存在一定程度上的耦合問題。 從制導角度來說,視線的俯仰和偏航通道存在嚴重的交叉耦合,因此傳統的假設姿態控制穩定,俯仰與偏航通道解耦設計就不再適用; 從控制的角度來說,BTT導彈在高速滾轉時會產生俯仰和偏航運動的交叉運動耦合,而面對稱飛行器滾轉與偏航的耦合關系又會產生對飛行不利的側滑角,因此針對STT控制的三通道獨立設計不再適合BTT控制。
(3) 多不確定性。 由于射程較遠,遠程導彈在飛行過程中需要面對許多的不確定性,包括氣動不確定性、 傳感器噪聲、 與作戰平臺數據交換時的干擾與延時、 對機動目標估計的誤差等,這些都會給制導與控制系統的設計造成一定困難。
可以看出,遠程沖壓發動機導彈具有許多不同于常規動力導彈的飛行特點,這為導彈的制導控制系統設計提出了很多新的難點和挑戰。
2制導律設計的發展
針對設計方法的不同,沖壓發動機導彈相關的制導律可分為經典制導律設計、 最優制導律設計與現代制導律設計。 經典制導律結構簡單,物理意義直觀,直到現在仍然是工程中的首選方法。 但隨著科技的不斷進步,武器裝備的革新,越來越強調要充分挖掘導彈的最大潛力,于是最優制導律應運而生。 在制導律設計的過程中,導彈模型實質上是一個典型的時變不確定非線性系統,而經典制導律的設計都是基于線性模型得來,很難滿足現代導彈的制導需求,隨著控制理論的不斷發展,學者們提出了基于不同方法的現代制導律設計。
2.1經典制導律設計
基于早期幾何概念的制導規律通常稱為經典制導規律,主要有追蹤法、 平行接近法、 比例導引法。 其中比例導引法(PN)是最常見的導引律形式,具有結構簡單、 技術上易于實現、 彈道平滑等優點,在理論證明和實際應用中都較為成熟。 學者們在PN的基礎上,又提出了一系列的算法改進形式,包括理想比例導引(IPN)、 增廣比例導引(APN)、 真比例導引(TPN)等。 國外在PN算法上研究較早,其中,Guelman[5]基于Popov穩定性理論,給出了有限時間比例導引的穩定性證明; 文獻[6]考慮到對目標加速度估計的時延問題,證明了PN針對目標在彈目平面內機動制導性能更好,而APN針對目標在彈目平面外機動導引效果更佳; 文獻[7-8]提出了將傳統的PN進行改進,以適應不同種類導彈的制導需求。
國內方面,吳文海等[9]系統地比較了各種比例導引方法的含義、 定義與特性,分析得出了不同的比例導引改進方式的使用范圍; 方群等[10]從修正和補償思想出發,推導了PN的抗干擾能力,在此基礎上,引入了一種修正的PN,從而使得導引算法可以克服各種干擾,達到較好的制導效果。 盡管比例導引已在多種導彈型號上得到應用,但還存在一些缺陷,如對目標機動的假設和估計在實際中都較難實現。
2.2最/次優制導律設計
針對不同導彈的不同戰術要求,許多學者應用最優或次優方法來設計制導律,實現燃料最省,提高導彈射程,實現最短時間飛行,避免目標逃逸,使導彈具有更為理想的打擊效果。 文獻[11]以最小時間為性能指標,應用逐步二次規劃法(SQP)優化遠程沖壓發動機空空導彈的中制導; 文獻[12-13]考慮到末端角約束的限制,解決了一種非線性優化控制問題,分別設計了攔截彈中、 末段的次優制導律; 微分策略(DGT)主要是研究在微分方程的約束下,對策的雙方如何進行最優控制的問題,在制導律中有著廣泛的應用,Shaferman, 徐興元等[14-15]分別利用微分策略設計了攔截導彈的制導律,相比于PN導引方法,DGT可以以更少的信息獲取量,達到更好的攔截效果; 王華等[16-17]結合沖壓發動機特性分析了地空導彈的爬升特性,分別就飛行時間最短和燃料最少兩種末端性能指標,利用遺傳算法對爬升彈道進行優化; 段磊[18]在建立了遠程空空導彈非線性三通道模型的基礎上,采用多時間尺度技術,解決了BTT導彈在末制導段快速滾轉時的次優控制指令問題。 除上述方法外,奇異攝動理論、 偽譜法等[19-20]理論也被用于制導律優化上。
2.3現代制導律設計
針對導彈在飛行中的非線性與不確定性,學者們致力于將先進控制理論應用到制導律的設計當中,以提高制導過程的魯棒性。
(1) 非線性制導律。 非線性方法的研究近年來受到廣泛關注,在導彈制導律設計中也得到了借鑒和應用。 李君龍等[21]考慮在導彈攔截末端的接近點,通過非線性精確線性化理論,將彈目運動方程轉化為線性模型,再通過狀態反饋設計控制器; 李超勇等[22]給出時域下指令攻角的算法和微分幾何制導律,并研究了制導律在攔截高速目標時的捕獲條件和奇異條件,通過仿真分析了該算法的優越性。 但上述制導律均需要精確的目標運動信息,不適用于攔截具有高機動能力的目標。
(2) 滑模制導律。 滑模變結構控制對于攝動和擾動均有一定的抑制作用,在導彈的制導律設計中得到了廣泛的應用。 Brierley等[23]將比例導引律設為基礎的滑模面,設計了空空導彈的滑模變結構制導律,并對滑模的存在性和收斂性進行了推導; 李志平等[24]利用觀測目標機動加速度的設計思想,提出了基于目標機動補償的滑模變結構制導律; 在利用趨近律設計滑模變結構制導律的基礎上,設計了制導系統的目標機動觀測器,實現了針對目標高速與機動的自適應制導。
(3) 智能制導律。 智能控制在處理非線性復雜系統上具有明顯優勢,在制導律的設計上也受到許多關注。 Cottrell等[25]基于神經網絡設計了動能攔截導彈的末制導律,與APN相比,可減少導彈的體積和質量,達到最優攔截效果; Zhang Lei,Creaser等[26-27]以模糊控制為基礎,結合PID控制、 自適應控制等方法,設計導彈的制導律,通過仿真說明了算法相對于APN和DGT的優越性; 李士勇等[28]以攔截大機動目標為目的,將目標的機動加速度視為外界干擾,結合自適應控制與模糊控制設計末制導律,保證了彈目視線角速率在較小的范圍,提高了制導系統的魯棒性。
現代制導在針對攔截高機動目標、 提高制導系統魯棒性等方面有明顯優勢,但使制導系統更為復雜、 物理意義不直觀,在向實際工程轉化中還需要進一步探討與研究。
3控制律設計的發展
控制律依據設計方法的不同,可分為經典設計方法和現代控制設計方法。 經典設計方法首先將導彈模型簡化為SISO線性時不變模型,在此基礎上利用根軌跡、 Bode圖等方法設計控制參數; 隨著控制理論與電子計算機技術的發展,越來越多的先進方法也被學者和工程師們應用到導彈的自動駕駛儀設計當中。
3.1經典控制律設計
現階段大多數導彈的控制系統是采用時頻域方法設計的,這種方法簡單實用、 物理概念直觀,設計人員可以依據豐富的工程經驗,通過對控制參數的不斷調整優化,最后達到理想的控制效果。 早在20世紀80年代,針對BTT導彈,文獻[29]設計了三通道解耦控制,首先設計俯仰和偏航的PI控制器,通過偏航角速率增加荷蘭滾阻尼,在滾轉通道用滾轉角和滾轉角速率反饋; Kovach等[30]忽略了三通道的耦合關系,利用頻率法和根軌跡獨立設計三通道的控制器,保證了俯仰和滾轉通道滿足設計要求,并使偏航通道的響應速度與滾轉通道相同; 趙霞[31]針對沖壓發動機防空導彈,通過在偏航速率的交叉支路上附加一個滾轉速率的指令,來消除導彈機動時大滾轉速率下,俯仰偏航通道耦合所產生的側滑角的影響。 經典控制律易于實現,但在針對大包線飛行、 強非線性、 多不確定性等方面,經典控制弊端明顯,所得到的控制效果往往不盡如人意。
3.2現代控制律設計
現今,多種先進控制方法已取得完備的理論證明,相比于經典控制,其控制性能好、 魯棒性強,具有一定的優勢。
(1) 自適應控制。 現代戰術導彈具有飛行包線大、 多不確定性等特點,學者通過應用自適應控制來抑制這些不利影響。 Tan Feng等[32]應用一種適用于線性時變系統的增益調度方法設計導彈控制,保證了全局穩定性與閉環控制性能,設計過程簡單靈活,易于轉化到工程之中。 L1自適應方法是在傳統模型參考自適應(MRAC)的基礎上,通過增加低通濾波環節,降低高自適應所帶來的系統振蕩。 Peter等[33]在基準控制的基礎上設計了L1自適應導彈自動駕駛儀,以補償模型不確定所帶來的影響,同時保證系統的穩定性與快速性。
(2) 變結構控制與反步控制。 變結構滑模控制具有響應速度快、 超調量小、 結構簡單等特點,近年來受到眾多學者的關注,滑模控制針對模型不確定和外界干擾具有強魯棒性; 反步控制是一種非線性方法,其在不確定非線性系統的魯棒或自適應控制器設計方面受到許多學者的重視。 變結構控制與反步控制的結合,在導彈控制系統的設計中得到了廣泛的應用。 朱凱等[34]將反步控制與滑模控制相結合,設計了一種新型的BTT導彈控制器,應用滑模控制的強魯棒性,解決了反步控制的“計算膨脹”問題,省略了微分器或濾波器的引入,大大簡化了控制器的設計; 董朝陽[35]針對BTT導彈,在標稱模型上設計反步控制器,在此基礎上,增加一個積分滑模控制補償,提高系統的魯棒性,以抑制模型不確定和外界干擾所帶來的不利影響。
(3) 智能控制。 智能控制具有處理復雜非線性系統的能力和一定的魯棒性與容錯性,這些特性都是導彈控制系統設計者所關注的。 McFarland等[36]針對一型防空導彈,在動態逆控制的基礎上,增加反饋神經網絡在線學習補償器,通過仿真證明所設計控制器相較傳統增益調節方法的優越性; McDowell等[37]針對BTT導彈,應用高斯型徑向基神級網絡,補償導彈在整個包線飛行時所出現的時變動態不確定與操縱機構飽和,解決了固定增益在導彈大空域飛行時所帶來的限制; 魏喜慶[38]針對導彈強耦合非線性時變特性,分別將自適應控制與逆系統兩種方法與神網絡相結合,設計了兩種BTT控制器,通過仿真驗證了算法相較三通道法的優越性。
除上述研究成果,非線性控制、 魯棒控制等[39-40]先進控制方法也在沖壓發動機導彈的控制中得到借鑒和應用。 應用現代控制理論,導彈控制律在性能與魯棒性上具有一定的優勢,但計算量與實時性問題是現代控制算法向工程轉換所急需解決的問題。
4制導與控制發展的關鍵技術
針對導彈自身特點以及現代戰場的復雜特性,本文認為,遠程沖壓發動機導彈還需要從以下幾個方面進行深入研究。
4.1彈道優化設計
彈道優化設計是現代導彈制導控制設計的關鍵技術之一。 在實際的工程中,沖壓發動機導彈一般是在爬升后進入平飛巡航狀態,巡航的高度和速度等狀態一般是依照設計者的經驗和大量仿真所確定,并不是理論上的最優彈道。 文獻[41]針對沖壓發動機導彈,通過仿真比較了在不同巡航高度下的導彈制導性能,并分別基于經典控制和最優控制設計了導彈的自動駕駛儀。 文獻[42-44]考慮不同的指標,分別對沖壓發動機導彈爬升、 平飛巡航進行了一定程度的優化。 上述文獻中的優化設計方式都是在離線靜態環境下進行的。 Halswijk等[45]指出離線優化方法的魯棒性在飛行狀態變化劇烈時很難保證,制導性能會大大降低,所得到的導彈也就不是最優的。 如何保證導彈在最優狀態下飛行,具有一定的抗干擾能力且易于工程實現,需要進一步探討。
4.2制導控制一體化(IGC)方法
在傳統的導彈制導律設計過程中,通常將導彈的動態特性簡化為無慣性質點,這樣可以大幅度降低設計復雜性與時間成本。 但在現實中,導彈的動態特性是一個存在慣性的高階復雜系統,不考慮導彈動態特性得到的制導律不是最優的。 另外,完全忽略制導與控制之間的耦合關系,也不利于充分發揮導彈的機動過載能力。
IGC可以由彈目之間的運動關系直接得出導彈的舵偏角指令,以控制導彈截獲目標。 Williams等[46]最早提出一體化的概念,隨后得到了各國學者的廣泛關注; Xin Ming等[47]同時考慮制導與控制為性能指標,用一種次優控制方法——θ-D算法設計制導控制一體化系統; Menon等[48]針對質量矩再入彈頭,建立了9自由度制導控制模型,應用反饋線性化實現控制; 國內方面,段廣仁等[49]利用非線性狀態變換將一體化模型轉化為標準形式,利用變結構滑模方法,設計了一體化控制律來抑制系統中的非匹配不確定性; 薛文超等[50]針對一體化模型的高階數與多不確定性,提出了應用自抗擾控制方法來實現制導控制一體化,并對系統中的非線性不確定性進行實時的補償與估計; 尹永鑫[51]等以微分幾何方法對一體化模型進行反饋線性化,并依據所期望的性能,應用特征結構配置方法設計三維一體化控制系統的結構。 盡管近年來一體化技術得到飛速發展,但在一體化模型建立、 高階復雜系統的處理、 抑制不確定等方面還需要進一步研究。
4.3目標機動與狀態估計
現代戰爭中,導彈打擊目標的機動性日益增強,如無人機、 新一代戰斗機、 戰術彈道導彈等。 經典的制導律不考慮目標機動,或只考慮簡單機動,將復雜機動作為未知擾動看待。 由于對目標的機動加速度難以實時在線測量, 經過復雜的數學處理獲得的目標信息也存在時延等問題, 因此,包含目標加速度信息的制導律,在目標進行大機動時,很容易造成脫靶。 文獻[52-53]論述了目標進行機動時對制導律的影響。 因此,大機動目標的制導律,以及對狀態的預測和估計,都是需要著重研究的問題。
文獻[54-55]均在PN的基礎上對目標逃逸機動進行指令補償; 馬克茂等[56]在此基礎上,設計了變結構制導律,同時應用高增益觀測器對視線變化率進行估計; 董朝陽等[57]提出預測交班點的概念并給出中制導段的性能指標,設計了滿足約束的最優中制導律。 綜上,如果能對目標機動合理建模,或采用具有理論和工程價值的觀測器和濾波器,將有助于在目標機動時提高制導精度。
4.4BTT控制與速度控制
面對稱的構型與小側滑角的約束,決定了沖壓發動機導彈在飛行時主要采用BTT控制技術。 BTT具有機動性強、 升阻比大、 穩定性好等特點,對于大機動導彈和遠程導彈來說有明顯優勢。
美國在20世紀50年代就將BTT技術應用于波馬克導彈的設計中[58],此后各國學者一直在不斷地研究、 探討和發展這一技術。 沈成林等[59]就BTT導彈在制導與控制上的問題與難點進行了描述; Nesline等[60]應用經典控制和線性二次調節器研究了BTT導彈的自動駕駛儀設計。 盡管BTT控制發展已有多年,但在動力學研究和控制領域還有許多問題,如導彈運動與控制上的耦合、 非線性與自適應性、 復合控制問題以及系統狀態優化等。
沖壓發動機區別于火箭發動機,可通過流量調節裝置調整推力,增加一維的速度控制,使導彈在末制導段具有全速攔截能力,減小脫靶量。 此外,沖壓發動機的推力依賴于高度、 攻角和彈道傾角等狀態,因此,推力并不是恒定的,必須對速度加以控制。 文獻[61]給出針對沖壓發動機的雙速度控制律結構,通過“小范圍”控制來維持馬赫數不變,“大范圍”控制用于大幅度速度變化。 在導彈飛行中,發動機的推力會影響彈道,且導彈的飛行狀態改變也會影響發動機工作狀態,為保證彈道理想,須對速度加以精確控制。 此外,應用于飛機的速度控制技術也可借鑒于導彈之中。
5結束語
制導與控制系統對于導彈的關鍵性與重要性不言而喻。 在越來越強調超視距、 高精度打擊的現代戰爭中,制導與控制系統的設計是滿足導彈戰術要求的核心技術之一。 以沖壓發動機為動力的遠程戰術導彈出現已有多年的歷史,但在制導與控制設計方面,針對高機動目標的制導方法、 考慮多約束的全彈道優化、 針對導彈動態特性的制導設計等先進技術還需要學者與工程師進一步的研究和探索。 本文綜述了國內外相關的制導律與控制律設計方法,可以為以后的沖壓發動機導彈研制提供參考與借鑒。
參考文獻:
[1] 鮑福廷. 固體火箭沖壓發動機的發展及關鍵技術[C] ∥中國宇航學會固體火箭推進第22屆年會論文集,2005: 304-309.
[2] Fry R S. A Century of Ramjet Propulsion Technology Evolution[J]. Journal of Propulsion and Power,2004,20(1): 27-58.
[3] 張明,田宏偉,梁彥. 沖壓發動機在戰術導彈上的應用[J]. 飛航導彈,2005(6): 50-53.
[4] 陳怡,閆大慶. 流星導彈的關鍵技術及最新研制進展 [J]. 飛航導彈,2012,(6): 17-21.
[5] Guelman M. The Stability of Proportional Navigation Systems[C]∥AIAA Guidance,Navigation and Control Conference,Portland,OR,1990.
[6] Imado F,Kuroda T,Ichikawa A. A Trade-off Study between Conventional and Augmented Proportional Navigation[C]∥AIAA Guidance,Navigation and Control Conference,San Diego,CA,1996.
[7] Yuan Pin-Jar,Chern Jeng-Shing. Ideal Proportional Navigation[J].Advances in the Astronautical Sciences,1992,95(5): 501-512.
[8] Yuan Pin-Jar,Chen Ming-Ghow,Chern Jeng-Shing. Extended Proportional Navigation[C]∥AIAA Guidance,Navigation and Control Conference,Denver,CO,2000.
[9] 吳文海,曲建嶺,王存仁, 等. 飛行器比例導引綜述[J]. 飛行力學,2004,22(2): 1-5.
[10] 方群,陳武群,袁建平. 一種抗干擾修正比例導引律的研究[J]. 宇航學報,2000,21(3): 76-81.
[11] Kuroda T,Mihara S,Matsuda H,et al. Optimal MidCourse Guidance of Variable Flow Ducted Rocket Missiles[C]∥AIAA Guidance,Navigation and Control Conference,Boston,MA,1998.
[12] Indig N,Asher J Z B,Farber N. Near-Optimal Spatial Midcourse Guidance Law with an Angular Constrain[J].Journal of Guidance Control and Dynamics, 2012, 37(1): 214-223.
[13] Indig N,Asher J Z B,Sigal E. Near-Optimal Minimum Time Guidance under a Spatial Angular Constraint in Atmospheric Flight[C]∥AIAA Guidance,Navigation and Control Conference,Kissimmee,Florida,2015.
[14] Shaferman V,Shima T. Linear Quadratic Differential Games Guidance Law for Imposing a Terminal Intercept Angle[C]∥AIAA Guidance,Navigation and Control Conference and Exhibit,Honolulu,Hawaii,2002.
[15] 徐興元,蔡遠利.具有碰撞角約束的微分對策導引律研究[J]. 彈箭與制導學報,2015,35(4): 1-4.
[16] 王華,楊存富,劉恒軍. 沖壓發動機為動力導彈爬升彈道優化[J]. 彈箭與制導學報,2008,28(3): 185-188.
[17] 王華,楊存富,劉恒軍. 以沖壓發動機為動力的導彈爬升彈道研究[J]. 現代防御技術,2008,36(4): 27-30.
[18] 段磊. 一種針對采用沖壓發動機的遠程空空導彈末段制導算法研究[J]. 科學技術與工程,2012,12(27): 7013-7018.
[19] Hou Hongyan,Hager W,Rao A.Convergence of a Gauss Pseudospectral Method for Optimal Control[C]∥AIAA Guidance,Navigation and Control Conference,Minneapolis,Minnesota,2012.
[20] 喬洋,趙育善,陳士櫓. 一種奇異攝動最優中制導律在高超音速巡航導彈中的應用[J]. 彈箭與制導學報,2004,24(2): 8-11.
[21] 李君龍,胡恒章. 一種基于反饋精確線性化的空間攔截末制導律[J]. 宇航學報,1997,18(4): 13-17.
[22] 李超勇,荊武興,齊治國,等. 空間微分幾何制導律應用研究[J]. 宇航學報,2007,28(5): 1235-1240.
[23] Brierley S D,Longchamp R. Application of Sliding Mode Control to Air-Air Interception Problem[J]. IEEE Transactions on Aerospace and Electronic Systems,1990,26(2): 306-325.
[24] 李志平,郭建國,周軍. 基于目標機動觀測器的滑模制導律設計[J]. 計算機測量與控制,2013,21(9): 2474-2476.
[25] Cottrel R G, Vincent T L, Sadati S H. Minimizing Interceptor Size Using Neural Networks for Terminal Guidance Law Synthesis[J].Journal of Guidance Control and Dynamics,1996,19(3): 557-562.
[26] Zhang Lei. Adaptive Fuzzy-PID Controllers Based on Optimal Fuzzy Reasoning for Missile Terminal Guidance[C]∥AIAA Areospace Sciences Meetings,Orlando,Florida,2009.
[27] Creaser P,Stacey B,White B. Fuzzy Missile Guidance Laws[C]∥AIAA Guidance,Navigation and Control Conference and Exhibit,Boston,MA,1998.
[28] 李士勇,袁麗英. 攔截機動目標的自適應模糊末制導律設計[J]. 電機與控制學報,2009,13(2): 312-316.
[29] Lin Ching-Fang,Yueh W R. Coordinated Bank-to-Turn Autopilot Design[C]∥American Control Conference,Boston,MA,1985:922-926.
[30] Kovach M J,Stevens T R,Arrow A. A Bank-to-Turn Autopilot Design for an Advanced Air-to-Air Interceptor[C]∥AIAA Guidance,Navigation and Control Conference,Monterey,CA,1987.
[31] 趙霞. 防空導彈BTT控制解耦算法[J]. 四川兵工學報,2013,34(8): 37-39.
[32] Tan Feng,Duan Guangren. Global Stabilizing Controller Design for Linear Time-Varying Systems and Its Application on BTT Missiles[J]. Journal of Systems Engineering and Electronics,2008,19(6): 1178-1184.
[33] Peter F,Holzapfel F,Xargay E, et al. L1 Adaptive Augmentation of a Missile Autopilot[C]∥AIAA Guidance,Navigation and Control Conference,Minneapolis,Minnesota,2012.
[34] 朱凱,齊乃明,秦昌茂. BTT導彈的自適應滑模反演控制設計[J]. 宇航學報,2010,31(3): 769-773
[35] 董朝陽,陳宇,王青,等. 基于積分滑模的BTT導彈魯棒反演控制律設計[J]. 航空兵器,2011(1): 3-8.
[36] McFarland M B,Calise A J. Neural-Adaptive Nonlinear Autopilot Design for an Agile Anti-Air Missile[C]∥AIAA Guidance,Navigation and Control Conference,San Diego,CA,1996.
[37] McDowell D M,Irwin G W,McConnell G. Online Neural Control Applied to a Bank-to-Turn Missile Autopilot[C]∥AIAA Guidance,Navigation and Control Conference,Monterey,CA,1993.
[38] 魏喜慶. 基于神經網絡的BTT導彈自動駕駛儀設計[D]. 哈爾濱: 哈爾濱工業大學,2007.
[39] 姚成法. BTT導彈魯棒自動駕駛儀設計[D]. 西安: 西北工業大學,2007.
[40] 晉玉強,史賢俊,王學寶. 基于神經網絡的BTT導彈魯棒動態逆設計[J]. 系統工程與電子技術,2008,30(2): 327-330.
[41] Goldstein F,Cslise A. Adaptive Control of Variable Flow Ducted Rockets[C]∥AIAA Guidance,Navigation and Control Conference,Gatlinburg,TN,1983.
[42] 施雨陽,萬自明,徐敏. 沖壓發動機導彈爬升軌跡/發動機一體優化設計[J]. 計算機仿真,2013,30(10): 138-142.
[43] 尚騰,谷良賢,趙吉松,等. 沖壓發動機導彈爬升軌跡與推力調節規律優化[J]. 飛行力學,2012,30(3): 280-283.
[44] 祁鵬,楊軍,常亮,等. 先進空空導彈最優中制導律研究[J]. 計算機仿真,2010,27(9): 75-78.
[45] Halswijk W. Online Dynamic Flight Optimisation Applied to Guidance of a Variable-Flow Ducted Rocket[C]∥AIAA Guidance,Navigation and Control Conference,Chicago,Illinols,2009.
[46] Williams D E,Richman J,Friedland B. Design of an Integrated Strapdown Guidance and Control System for a Tactical Missile[C]∥AIAA Guidance,Navigation and Control Conference,New Jersey,SC,1983.
[47] Xin Ming,Balakrishnan S N,Ohlmeyer E J. Integrated Guidance and Control of Missiles with θ-D Method[J]. IEEE Transactions on Control Systems Technology,2006,14(6): 981-992.
[48] Menon P K,Sweriduk G D,Ohlmeyer E J, et al. Integrated Guidance and Control of Moving-Mass Actuated Kinetic Warheads[J].Journal of Guidance Control and Dynamics,2004,27(1): 118-126.
[49] 段廣仁,侯明哲,譚峰. 基于滑模方法的自適應一體化導引與控制律設計[J]. 兵工學報,2010,31(2): 191-198.
[50] 薛文超,黃朝東,黃一. 飛行制導控制一體化設計方法綜述[J]. 控制理論與應用,2013,30(12): 1511-1520.
[51] 尹永鑫,楊明,王子才. 導彈三維制導控制一體化設計[J]. 電機與控制學報,2010,14(3): 87-91.
[52] Emeliyano D,Rubinovich E,Miller B. Advanced Guidance Law Design Based on the Information-Set Concept[C]∥IEEE Conference on Decision and Contrl,Orlando,Florida,2001.
[53] Jeon I S,Lee J I,Tahk M J. Impact-Time-Control Guidance Law for Anti-Ship Missiles[J]. IEEE Transactions on Control Systems Technology,2006,14(2): 260-266.
[54] Kim B S,Lee J G,Han H S,et al. Homing Guidance with Terminal Angular Constraint Against Nonmaneuvering and Maneuvering Targets[C]∥AIAA Guidance,Navigation and Control Conference,New Orleans,LA,1997.
[55] Pini G,Mario J,Moshe G. Simple Guidance Law Against Highly Maneuvering Targets[C]∥AIAA Guidance,Navigation and Control Conference,Boston,MA,1998.
[56] 馬克茂,馬杰. 機動目標攔截的變結構制導律設計與實現[J]. 宇航學報,2010,31(6): 1589-1596.
[57] 董朝陽,周雨. 一種交班時刻性能最優的中制導律設計與仿真[J]. 系統仿真學報,2009,21(24): 7873-7877.
[58] 張靖男,趙興鋒,鄭志強. BTT導彈的發展現狀與趨勢[J]. 飛航導彈,2006,(10): 37-39.
[59] 沈成林,彭雙春,牛軼峰, 等. BTT導彈制導律研究綜述[J]. 國防科技大學學報,2011,33(2): 106-112.
[60] Nesline F W,Wells B H,Zarchan P. A Combined Optimal/ Classical Approach to Robust Missile Autopilot Design[C]∥AIAA Guidance,Navigation and Control Conference,New York,1979.
[61] 龔惠明. 使用沖壓噴氣發動機的導彈速度控制[J]. 戰術導彈技術,1981,(4): 68-75.
Review on Development of Guidance and Control for Long-Range Tactical Missile Based on Ramjet Technique
Ma Liqun,Duan Chaoyang
(China Airborne Missile Academy,Luoyang 471009,China)
Abstract:The flight process and characteristics of long-range tactical missile powered by ramjet are described. The design methods for guidance law and control law both at home and abroad are overviewed. Then the research status of key techniques are analyzed, including the trajectory optimization, integrated guidance and control, guidance law design for target maneuver, bank-to-turm(BTT) control and velocity control technology. At last, the trend of the ramjet missile in the guidance and control is discussed.
Key words:ramjet; long-range missile; guidance and control; BTT missile; integrate design
中圖分類號:TJ765. 1
文獻標識碼:A
文章編號:1673-5048( 2016) 02-0017-07
作者簡介:馬立群(1988-),男,吉林四平人,博士研究生,研究方向為飛行器制導與控制技術。
收稿日期:2015-10-21
DOI:10.19297/j.cnki.41-1228/tj.2016.02.003
