基于人車控制的運行車速模型研究
2016-06-08 03:28:54謝亞輝熊堅熊登胡瀟睿
公路與汽運 2016年3期
關鍵詞:駕駛員
謝亞輝,熊堅,熊登,胡瀟睿
(昆明理工大學交通工程學院,云南昆明 650500)
?
基于人車控制的運行車速模型研究
謝亞輝,熊堅,熊登,胡瀟睿
(昆明理工大學交通工程學院,云南昆明 650500)
摘要:為了研究道路條件變化時緩沖點運行車速的變化情況,建立基于人車控制的運行車速模型,該模型以現有的實測數據擬合模型為基礎,根據車輛縱向動力學特性和駕駛員行為特性進行補充和修正,其中駕駛員模型分為決策和操縱兩個部分,決策部分包含當前路況的限制和前方路況信息的預判,操縱部分通過改變油門、制動的開度使車輛的實際加速度達到駕駛員決策出的期望加速度。仿真分析和試驗結果表明該模型能再現車速隨道路條件的變化情況,同時可展示駕駛員通過油門、剎車控制車速的過程。
關鍵詞:公路交通;運行車速;自適應控制;駕駛員;預瞄
隨著對交通安全問題認識的深入,人們逐漸意識到公路條件對交通安全的影響。作為公路條件的核心因素,公路線形直接影響車輛的行駛速度。在以往針對運行車速的研究中,研究人員往往采用路段實測法,將路段現場實際測量得到的車速進行回歸分析,建立道路線形與運行車速之間的關系。該方法能粗略得到不同曲率半徑下的運行車速,但由于缺乏對駕駛員行為及車輛動力學特性的考慮,無法反映道路曲率變化時車速的變化情況。
該文在現有運行車速模型的基礎上,根據駕駛員行為特性及車輛的動力學特性,建立人車在環運行車速預測模型,預測不同線形道路的運行車速,同時得到駕駛員的操縱行為,為道路安全評價提供依據。該模型分為上層駕駛員控制策略和下層車輛動力學模型。
1 駕駛員控制模型
駕駛員的控制行為主要分為感知和操縱兩部分。在感知階段,駕駛員對采集到的道路信息進行分析,預估得到基于該路況的期望車速。在實際操縱階段,駕駛員則調整油門、制動踏板的位置,讓車輛的實際速度趨近于預估的期望速度(見圖1)。

圖1 駕駛員速度控制模型框圖
1.1駕駛員感知模型
將駕駛員感知行為劃分為對未來的預判和對當前情況的修正兩方面。對未來的判斷即駕駛員的預瞄行為。對于不同的車速,駕駛員的前視距離有很大差別,其原因主要在于高速情況下駕駛員更傾向于采用較遠的前視距離,以為可能遇到的突發情況爭取更多的反應及操作時間;而當駕駛員選擇低速行駛時,往往是由于受到道路條件的限制,需要以較低的速度來應付復雜的道路條件,相應地駕駛員前視距離也較短。因此,無法用一個恒定的前視距離來表征駕駛員的預瞄行為。但由于前視距離與車速呈正相關,可用兩者的比值即前視時間近似反映駕駛員的預瞄行為。考慮到該文討論的是高速條件下的運行車速建模,根據文獻[7]選取5 s作為駕駛員的固定前視時間。由此可計算出駕駛員的期望加速度apd:

式中:vpd為預瞄得到的5 s之后道路條件所對應的期望車速;vc為車輛當前實際速度。
除駕駛員預瞄得到的前方路況信息外,車輛當前的行駛狀況也會影響駕駛員對期望車速的決策。當車輛實際速度vc與駕駛員對當前道路的期望車速vcd不符合時,駕駛員會采取措施讓實際車速盡快達到期望車速,將相應的期望加速度設為acd。出于安全方面的考慮,駕駛員最終決策出的期望車速為兩者中的較小值,即

采用文獻[9]提出的運行車速測算模型計算不同曲率半徑道路下駕駛員的期望車速,該模型由外業實測數據擬合得出。在高速公路條件下,取半徑600 m以下的道路為小半徑曲線段,車速v85與路段曲線半徑R的關系為:

把曲率半徑大于600 m的路段統一看作直線路段,在直線路段穩定行駛時車速v85=115 km/h。
1.2駕駛員操縱模型
根據計算出的期望加速度,駕駛員通過控制油門、剎車踏板使車輛達到該期望加速度。在實際駕駛過程中,駕駛員很難根據期望加速度準確找到相應的油門開度或剎車力度,只能根據車輛的反饋來調節油門、剎車的輸入。以加速工況為例,當車輛的實際加速度小于駕駛員的期望加速度時,駕駛員加大油門開度;當車輛實際加速度大于期望加速度時,則通過收油減小車輛的加速度。
為了表現駕駛員控制油門、剎車的過程,將駕駛員踩油門的速度定義為1,即駕駛員將油門開度由零改變為100%所用的時間為1 s。以加速工況為例,汽車當前油門開度為20%,為了達到期望加速度,駕駛員需加大油門開度,則在0.3 s后油門開度增大到50%。通過定義駕駛員踩油門的速度,還可反映駕駛員在進行操作時的延遲。
同理,參照駕駛員的實際駕駛行為,將駕駛員踩剎車的速度定義為2。針對所采用的車輛模型,制動輪缸壓力由零上升到最大(3 MPa)所需時間為0.5 s。
2 車輛縱向動力學模型
2.1車輛行駛方程式
為了模擬車輛對駕駛員操縱行為的響應,建立車輛動力學模型。該模型主要針對平坦道路無風條件下40~120 km/h車速區間的工況,且控制系統的操控較為柔和。因此,可假設該車輛模型在換擋過程中車速恒定,加速、制動過程中加速度恒定。
基于以上假設,可建立車輪轉速Ww與發動機轉速We之間的比例關系:

式中:i為傳動系統的總傳動比;im為主減速器傳動比;ig為變速器傳動比。
令reff為車輪有效半徑,可進一步得到車輛縱向速度v與發動機轉速We之間的關系:

根據牛頓第二定律,車輛行駛時的縱向動力學方程為:


式中:m為汽車質量;a為汽車加速度;Fe為發動機輸出扭矩換算到車輪上的驅動力;Fb為制動器產生的制動力;Fw為空氣阻力;Ff為車輪的滾動阻力。

式中:Te為發動機輸出到變速器的扭矩。
2.2車輛行駛阻力模型
車輛在行駛過程中受到的外界阻力Fr為空氣阻力Fw和輪胎滾動阻力Ff,即

作用在車輛上的當量空氣阻力可表示為:

式中:ρ為空氣密度;Cd為空氣阻力系數;Af為迎風面積;vwind為風速。
由于車輛行駛在無風的環境中,風速vwind可忽略。在車輛行駛時,ρ、Af、Cd都可看作定值,因而車輛受到的空氣阻力可看作車輛的二階函數。因此,式(11)可簡化為:

式中:k1為比例系數。
車輪的滾動阻力可表示為:

式中:w為車輪負荷;f為滾動阻力系數。
滾動阻力系數f的大小主要受到路面種類、車輛行駛速度及輪胎結構、材料、氣壓等條件的影響,一般由試驗得到。如果不考慮車輛行駛過程中車重的改變,則可以把車輪的滾動阻力看作一個定值。參考以下經驗公式進行計算:

將式(14)代入式(13),得:

式(15)可簡化成:

由一階變量和二階變量分別合并,得到由系數k引導的變量。將式(12)、(16)代入式(10),得到車輛在行駛過程中受到的外界阻力:

再將式(17)代入式(7),得:

Fb為制動器產生的制動力,而在此先不考慮制動力也就是不進行制動,故Fb=0,式(18)可寫為:

因此,車輛在行駛過程中受滾動阻力和空氣阻力作用所產生的與行駛方向相反的等量加速度可以表示為:


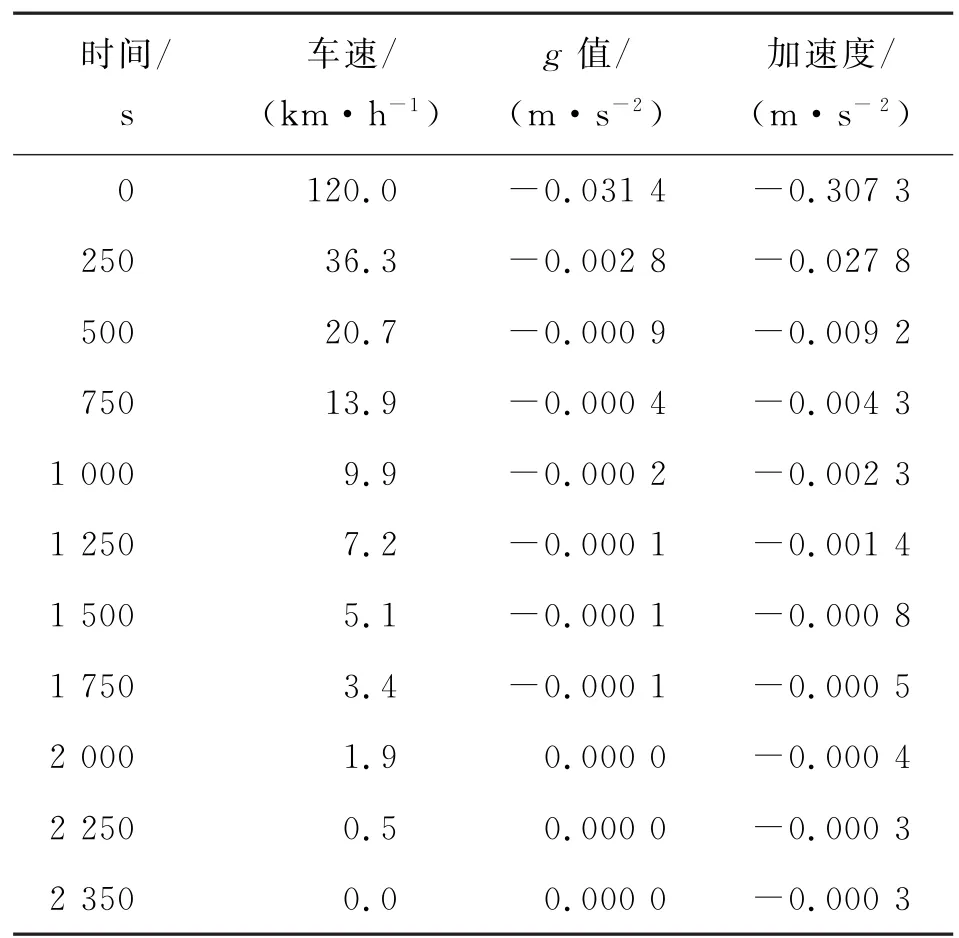
表1 車輛行駛阻力等效加速度
2.3發動機模型
由于發動機的動力輸出具有強非線性的特點,且輸出的扭矩主要受發動機轉速和節氣門開度兩個參數的共同影響,難以用簡單的傳遞函數模型表示。因此,采用基于發動機MAP圖的均值模型。利用式(6)、式(7)、式(9),將MAP圖中的發動機轉速轉換成車速,發動機輸出的扭矩轉換成該扭矩所能產生的等效加速度,建立以節氣門開度α和車速v為輸入、車輛等效加速度a為輸出的線性插值模型。
2.4制動器模型
在輪胎附著條件良好的情況下,車輛制動時的制動減速度與制動輪缸壓力呈線性關系。將實際得到的車輛減速工況下減速度-制動壓力曲線進行線性擬合,得:

式中:a為車輛減速度(m/s2);P為制動輪缸壓力(MPa)。
3 運行車速仿真計算
利用上述模型,運用MATLAB建模仿真,分別對3種典型駕駛工況下的運行車速進行仿真計算。
3.1由直線段進入曲線段
仿真中駕駛員操縱汽車由高速公路長直線段進入曲率半徑為350 m的曲線段,15 s后駛出彎道。圖2為該工況下的仿真結果。

圖2 變曲率工況仿真結果
由圖2可以看出:車輛由直線段進入曲線段時,該模型可使車輛在緩沖點很好地控制速度,汽車無法在預期時間降低或升高到目標速度。通過車速圖可以積分計算出駕駛員完成減速和加速過程需要的距離,該距離可作為修改緩沖路段的參考標準,參考該距離也可確定放置標志標牌的位置。
3.2由匝道駛入高速公路
仿真中駕駛員操縱汽車由限速為40 km/h的匝道駛入高速公路,圖3為該工況下的仿真結果。
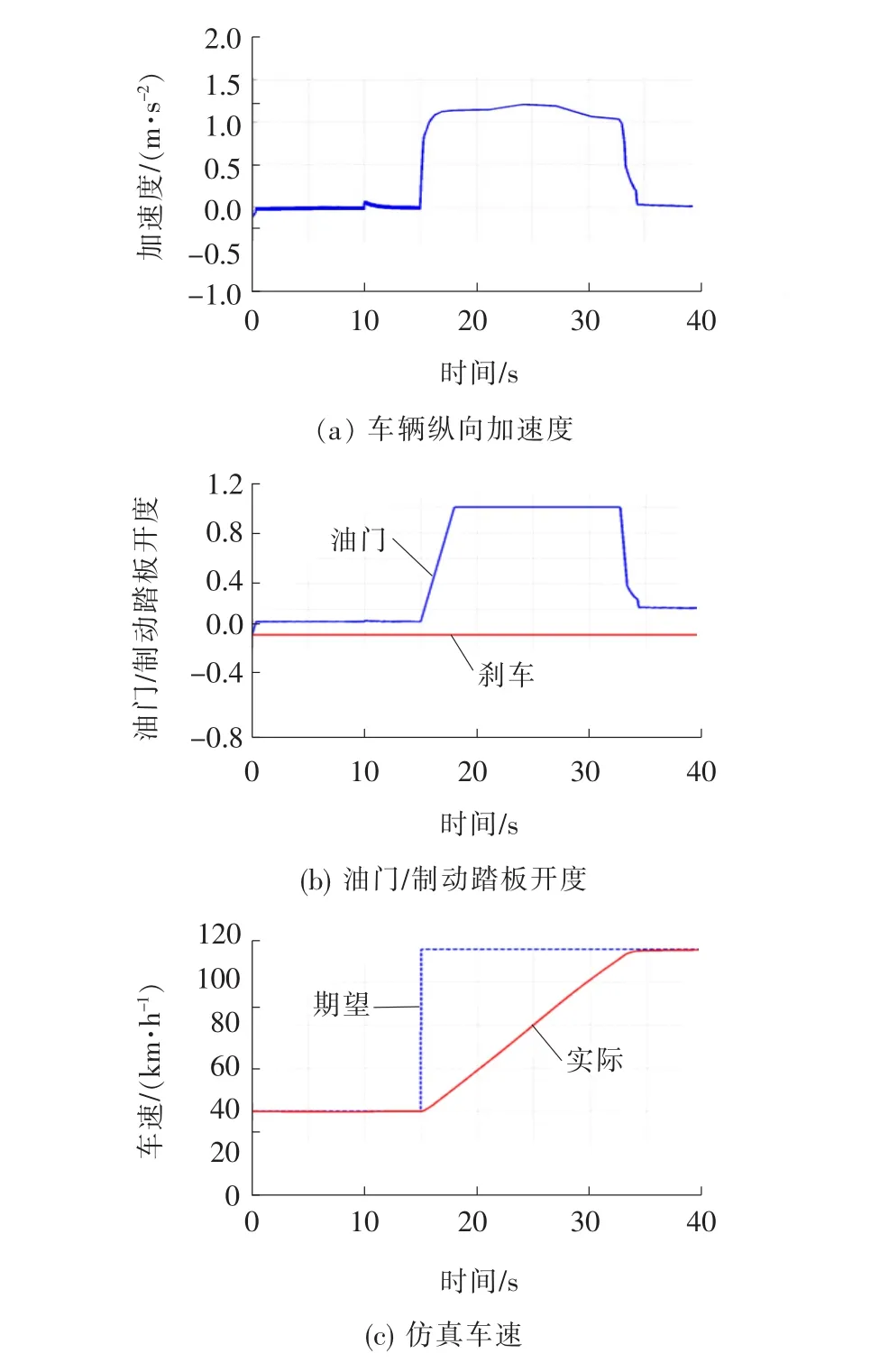
圖3 由匝道駛入高速公路時運行車速仿真
由圖3可以看出:車輛由匝道駛入高速公路時,受車輛動力學性能的限制,無法在5 s的預瞄時間內加速到駕駛員的目標車速。根據該結果,在匝道與高速公路交匯處需給車輛留出足夠的加速距離,以避免剛進入高速公路的車輛與高速公路上其他車輛的速度差異過大可能帶來的危險。將仿真結果中的車速進行積分,可計算出車輛由40 km/h加速到安全車速所需距離,該距離可作為緩沖路段長度的參考標準。
3.3由匝道駛出高速公路
仿真中駕駛員操縱汽車經減速車道由高速公路駛入限速為40 km/h的匝道,圖4為該工況下的仿真結果。

圖4 由匝道駛出高速公路時運行車速仿真
由圖4可以看出:當駕駛員預瞄時間為5 s時,即使駕駛員將剎車踏板踩到底,也無法在駛入匝道時將車速降至40 km/h。根據該仿真結果,為了使車輛能以安全車速駛入匝道,在不改變車輛動力學性能的情況下,只能增加駕駛員的預瞄時間。在高速公路上,常用的方法是在接近匝道的位置樹立標志標牌對駕駛員進行引導,讓駕駛員能提前減速,該過程相當于增加駕駛員的預瞄距離。根據該模型可科學合理地確定標志標牌樹立的位置。
4 結語
該文通過建立車輛縱向動力學模型和駕駛員速度控制模型,對現有運行車速模型進行補充和修正,提出了人車在環運行車速預測模型。不僅能展示道路條件變化時車速的變化情況,還能再現駕駛員對油門、剎車的控制行為,為道路線形安全評價提供參考。采用基于MAP圖查表的方法計算不同轉速和節氣門開度下發動機輸出的扭矩,相比參數化均值模型更簡單、方便,且方便在不同車型之間移植。建立了駕駛員速度控制模型,在決策部分同時考慮了駕駛員的預瞄行為和車輛當前行駛路段的條件限制;在操縱部分通過自適應方法使車輛的實際加速度達到駕駛員的期望加速度。
該模型只針對水平路段的速度控制,不同坡度下的速度控制及車輛的方向控制還需進一步研究。
參考文獻:
[1] 高建平,孔令旗,郭忠印,等.高速公路運行車速研究[J].重慶交通學院學報,2004,23(4).
[2] 裴玉龍,程國柱.高速公路運行車速調查與限制車速問題研究[J].哈爾濱工業大學學報,2003,35(2).
[3] 程國柱.高速道路車速限制方法研究[D].哈爾濱:哈爾濱工業大學,2007.
[4] Guo Konghui,Guan Hsin.Modelling of driver/vehicle directional control system[J].Vehicle System Dynamics,1993,22(3-4).
[5] 高振海.駕駛員最優預瞄加速度模型的研究[D].長春:吉林大學,2000.
[6] 高菲,李向瑜,段立飛,等.駕駛員前視行為特性的動態變化規律[J].汽車工程師,2010(2).
[7] Macadam C C.Application of an optimal preview control for simulation of closed-loop automobile driving [J].IEEE Transactions on Systems,Man and Cybernetics,1981(6).
[8] 鄭安文.期望車速的意義及其影響因素分析[J].武漢科技大學學報:自然科學版,2005,28(1).
[9] 范振宇,張劍飛.公路運行車速測算模型的研究和標定[J].中國公路學報,2002,15(1).
[10] Hong M,Ouyang M,Shen T.Torque-based optimal vehicle speed control[J].International Journal of Automotive Technology,2011,12(1).
[11] Rajesh Rajamani.Vehicle dynamics and control[M]. Springer-Verlag New York Inc,2012.
[12] 王建強,邱紅桐,王運霞,等.基于BP神經網絡的雙車道公路運行車速預測模型[J].公路與汽運,2009(5).
[13] 袁凱.基于道路線形的高速公路運行車速預測模型研究[D].長沙:長沙理工大學,2011.
[14] 賀玉龍,盧仲賢,馬國雄,等.高速公路直線段車輛穩定運行速度模型[J].公路,2002(10).
[15] 鐘小明,陳永勝,張杰,等.公路平曲線路段大型車運行速度模型研究[J].公路交通科技,2005,22(12).
[16] 易曉罡.運行速度模型法計算分段的探討[A].湖北省公路學會二○○九年學術年會論文集[C].2010.
中圖分類號:U491.2
文獻標志碼:A
文章編號:1671-2668(2016)03-0029-05
收稿日期:2015-11-18
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
活力(2019年22期)2019-03-16 12:46:58
汽車電器(2018年1期)2018-06-05 01:22:54
紅土地(2016年6期)2017-01-15 13:45:55
汽車與安全(2016年5期)2016-12-01 05:22:10
公民與法治(2016年4期)2016-05-17 04:09:26
城市道橋與防洪(2014年7期)2014-02-27 07:28:09
解放軍生活(2013年5期)2013-04-29 21:51:50