隧道病害快速檢測技術現狀及分析比較?
2016-06-08 03:29:44王平讓
公路與汽運 2016年3期
王平讓
(河南省交通科學技術研究院有限公司,河南鄭州 450006)
?
隧道病害快速檢測技術現狀及分析比較?
王平讓
(河南省交通科學技術研究院有限公司,河南鄭州 450006)
摘要:以計算機信號分析和圖像處理為基礎的快速檢測技術可實現隧道病害檢測的自動化、快速化和客觀化,克服了傳統檢測方法存在的工作量大、效率低、主觀性強等缺點。文中在對國內外最新隧道病害快速檢測技術研究開發現狀進行綜述的基礎上,根據傳感器類型的不同將該檢測技術分成基于攝像測量的快速檢測技術和基于激光掃描的快速檢測技術兩類,選取具有代表性的研究開發機構及其檢測系統進行分析,并從硬件組成和軟件算法兩方面對兩類檢測技術的特點進行了綜合分析比較,提出了今后的發展方向。
關鍵詞:隧道;病害監測;快速檢測;攝像測量;激光掃描
隨著隧道工程建設的快速發展,隧道病害問題日益突出。為了對隧道病害進行整治,首先需對病害情況進行全方位檢測。傳統的隧道病害檢測方法主要采用目測,配備一定的簡易設備,如機械式或數顯式病害觀測儀等,進行現場記錄和病害標記,人工描繪病害展開圖。這些檢測方法需要大量的人力、物力,費時、費力,危險程度高,對于隧道拱頂病害檢測還需專門的升降設備,而且檢測結果主觀性大,不同檢測人員會得出不同的檢測結果,不利于對隧道安全性進行客觀和定量評價。國際隧道協會通過分析總結隧道病害檢測的經驗和教訓,指出無損快速檢測技術將是今后的發展方向。日本已經在隧道無損快速檢測技術方面作了大量研究,并取得了一定的研究成果。
隧道病害快速檢測技術主要采用各種形式的傳感器探測隧道襯砌影像圖,通過圖像處理完成對病害的檢測和分類等。根據傳感器類型的不同,隧道病害快速檢測技術可分為攝像測量檢測技術和激光掃描檢測技術兩類。
1 攝像測量快速檢測技術
攝像測量以透視幾何理論為基礎,基于數字影像與攝影測量的基本原理,通過攝像手段(CCD或CMOS圖像傳感器)確定目標的外形和運動狀態,并形成圖像,圖像上每一個像素點的灰度反映空間物體表面某點反射光的強度,而該點在圖像上的位置則與空間物體表面對應點的幾何位置有關。該方法可瞬間獲取被測物體的大量物理和幾何信息,是一種基于數字信息和數字影像技術及自動控制手段的非接觸式快速檢測技術。
隧道病害攝像測量快速檢測技術主要采用CCD工業相機(線陣或面陣)對隧道襯砌表面進行快速連續掃描,得到隧道襯砌表面影像圖,再采用圖像處理和圖像識別算法提取病害信息,并繪制病害展開圖。下面介紹這方面研究比較典型的研究機構及其檢測系統。
1.1韓國漢陽大學

圖1 韓國漢陽大學隧道檢測系統
韓國漢陽大學機械工程系應用移動式機器人系統對隧道襯砌病害進行快速檢測,機器人系統攜帶線掃描CCD工業相機(4 096像素/行)、減振器、編碼器和特定光源等設備,以5 km/h的檢測速度對隧道進行連續掃描。圖1和圖2分別為該檢測系統的組成部分和硬件配置示意圖。

圖2 韓國漢陽大學隧道檢測系統的硬件配置
1.2日本鐵道技術研究所
圖3和圖4為日本鐵道綜合技術研究所研究開發的公路隧道病害快速檢測系統。
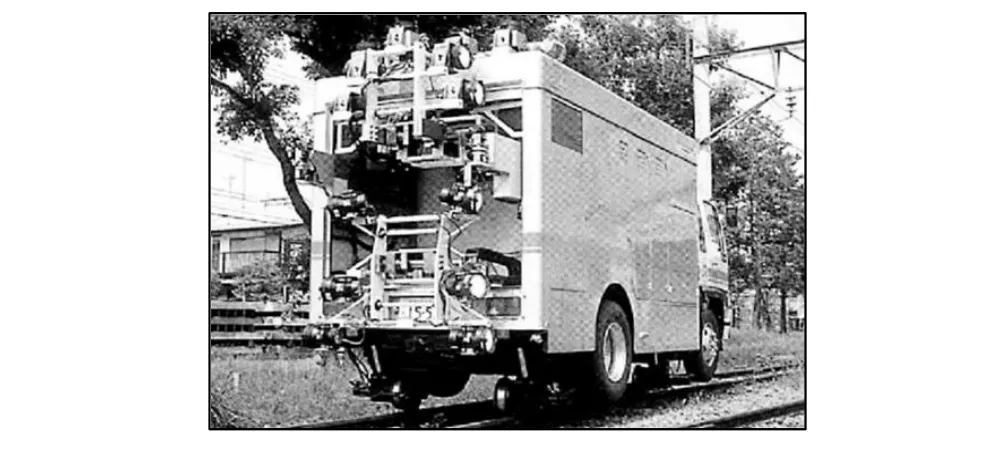
圖3 日本鐵道技術研究所隧道檢測系統
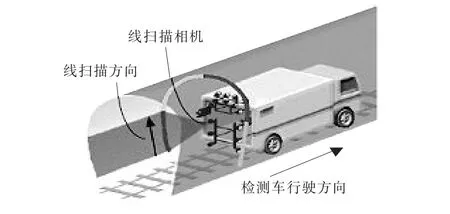
圖4 日本鐵道技術研究所隧道檢測系統掃描示意圖
該系統采用車載線掃描工業相機(圖像分辨率5 000像素/行)、高能金屬鹵化物光源和可編程自動調焦系統對隧道進行掃描檢測,檢測車行駛速度13 ~25 km/h,圖像分辨率0.5~1.0 mm/像素。采用的圖像分析方法為:先對源圖像進行中值濾波和直方圖歸一化處理,并進行陰影修正,然后應用動態閾值方法進行圖像二值化處理,應用膨脹和腐蝕等數學形態學運算方法去除孤立點并提取連續裂縫。該方法由于圖像分辨率不高及識別算法未考慮裂縫幾何形態,檢測到的裂縫最小寬度較大。
1.3日本計測檢查株式會社
圖5~7為日本計測檢查株式會社開發的市場化的病害隧道快速無損檢測系統。

圖5 日本計測檢查株式會社隧道檢測系統在工作中的狀況

圖6 日本計測檢查株式會社隧道檢測系統組成

圖7 日本計測檢查株式會社隧道檢測系統掃描示意圖
該快速檢測系統由車載的數臺CCD工業相機、高亮度光源、發電設備、設備箱和臺架等組成。所采集圖像的分辨率為0.3 mm/像素。在病害識別和分析方面已開發出相應的商業化軟件Crack-Draw21,可在軟件中顯示病害沿隧道拱頂的展開圖,根據展開圖可對隧道的安全狀況作出評估。該系統的不足之處是不能實現病害的完全自動識別,需要計算機自動識別和人工修正相結合,人工修正的工作量較大。
2 激光掃描快速檢測技術
激光掃描檢測通過激光掃描器和距離傳感器獲取被測目標表面形態,其工作過程實際上是一個不斷重復的數據采集和處理過程,通過具有一定分辨率的空間點所組成的點云圖來表達系統對目標物體表面的采樣結果。每掃描一個云點后,圖像傳感器將云點信息轉換成數字電信號并直接傳送給計算機系統,經過相應系統軟件進行一系列處理,獲取目標表面三維坐標數據,從而進行各種量算或建立立體模型,并形成視頻圖像。
隧道病害激光掃描快速檢測技術主要采用激光掃描器對隧道襯砌表面進行連續掃描,得到隧道襯砌表面影像圖。國外發達國家在這方面的研究較多,有的公司已開發出商業化檢測系統。
2.1瑞士GRP5000檢測系統
GRP5000是由瑞士AMBERG技術公司研究開發的隧道病害快速檢測系統(見圖8和圖9)。

圖8 瑞士GRP5000隧道檢測系統

圖9 瑞士GRP5000隧道檢測系統掃描示意圖
GRP5000系統采用激光掃描儀對隧道進行全方位檢測,可得到高清影像圖,可標注隧道病害并自動計算裂縫長度和滲水面積等參數,并將結果輸入Excel軟件進行圖形報表分析。當小車在軌道上行走時,高速旋轉的激光掃描儀發射的激光以螺旋線的形式對隧道表面進行全斷面掃描,通過分析發射和接收到的激光信號(強度和相位差),獲得隧道襯砌內表面影像圖及隧道襯砌表面各點距軌道中心線的距離。激光掃描儀每秒獲取高達50萬個測點的斷面數據,每個測點包含該位置的反射率和幾何尺寸信息(角度和距離),上述測量成果構成隧道表面狀態評估的基礎資料。
在病害識別和分析方面有專門的商業化軟件Tunnel Map,在該軟件中可建立隧道的數字化模型,其中最重要的內容是隧道內表面的數字化展開圖。為便于觀察和輸入信息,可將隧道沿拱頂中心展開,只需輸入表面上某一點或對象的里程及在展開圖中距拱頂中心的距離,便可定義其位置。另外,還可將隧道按區間進行劃分,便于進行管理和統計等,盾構隧道可直接將每個環片定義為一個區間分別進行管理。Tunnel Map軟件可充當隧道病害采集和狀態評價系統,用于觀察和收集已有建筑的結構數據,根據測點的幾何信息對隧道進行限界分析,還可分類標注各種病害,如裂縫和滲水區域等。病害展開圖具有坐標信息,可自動計算并統計裂縫長度和滲水面積等病害的幾何尺寸,這些數字化的信息和數據可作為隧道安全狀態評估的依據。
2.2德國SPACETEC TS3檢測系統
SPACETEC TS3是由德國SPACETEC公司研究開發的病害隧道快速掃描檢測系統(見圖10和圖11)。該系統可安裝在任何檢測車上,能對隧道進行全方位掃描檢測,檢測隧道襯砌滲水及其滲水面積、裂縫的寬度及位置。該檢測系統激光掃描器的掃描頻率為280 Hz,圖像分辨率為5 mm。

圖10 德國SPACETEC TS3隧道檢測系統

圖11 德國SPACETEC TS3隧道檢測系統組成
2.3法國ATLAS 70檢測系統
ATLAS 70是由法國HGH紅外系統公司研究開發的多傳感器隧道無損快速檢測系統(見圖12)。屬于多傳感器檢測系統,配置了激光掃描傳感器、紅外掃描傳感器、測距儀和計程儀等設備,可進行隧道裂縫和滲水的全方位檢測。激光器掃描頻率為300 Hz,圖像分辨率為5 mm。

圖12 法國ATLAS 70隧道檢測系統
3 分析比較
基于攝像測量和基于激光掃描的隧道病害快速檢測方法的技術指標比較見表1。

表1 隧道病害快速檢測技術比較
基于攝像測量的隧道病害快速檢測技術的優點是采用的工業相機分辨率很高,特別是采用線陣CCD工業相機時,分辨率更高,可達0.2 mm/像素,通常可檢測出細微的裂縫。其不足之處是需要特定的光源,光源系統的好壞直接決定了圖像質量,從而決定圖像識別算法的效果;另外,大多數算法還不能實現病害的完全自動識別,需要和人工修正相結合,人工修正工作量較大。
基于激光掃描的隧道病害快速檢測技術的優點是不需要特定光源,圖像質量較好。其不足之處是圖像分辨率不高,如瑞士AMBERG技術公司開發的GRP5000檢測系統采集到的圖像分辨率僅為5 mm/像素,且不能進行病害的自動識別;另外,大多數激光掃描檢測技術主要提供一個隧道襯砌病害和限界分析的數字化管理平臺,主要根據檢測人員的經驗進行病害識別和分析。
4 結語
隧道病害快速檢測技術可實現隧道病害檢測的快速化和客觀化,根據所采用傳感器類型的不同,可分為攝像測量快速檢測技術和激光掃描快速檢測技術兩類。兩類方法各有優缺點,攝像測量快速檢測技術獲取的圖像分辨率高,但需要特定的高亮度光源,而激光掃描快速檢測技術不需要特定的光源,但圖像的分辨率相對較低。兩種方法都可以獲取清晰的隧道病害圖像,但在病害識別和分析上,都要采用人工識別或人工修正的方法,自動識別程度不高。
病害的自動識別和評估、病害檢測結果的高精度化等將是今后隧道病害快速檢測技術研究的熱點,數字攝像測量和激光掃描技術的集成將是今后隧道病害快速檢測技術的發展方向。
參考文獻:
[1] Haack A,Schreyer J,Jackel G.State of the art of nondestructive testing methods for determining the state of a tunnel lining[J].Tunnelling and Underground Space technology,1995,10(4).
[2] Richards J A.Inspection,maintenance and repair of tunnels:international lessons and practice[J].Tunnelling and Underground Space technology,1998,13(4).
[3] Asakura T,Kojima Y.Tunnel maintenance in Japan [J].Tunnelling and Underground Space technology,2003,18(18).
[4] Mashimo H,Ishimura T.State of the art and future prospect of maintenance and operation of road tunnel [R].ISARC,2006.
[5] Sehenk T.Digital photogrammetry[M].Taylor & Francis Ltd,1999.
[6] Yu Seung-Nam,Jang Jae-Ho,Han Chang-Soo.Auto inspection system using a mobile robot for detecting con-crete cracks in a tunnel[J].Automation in Construction,2007(16).
[7] HIroshi Sasama,Masato Ukai,Masaru Ohta,et al.Inspection system for railway facilities using a continuously scanned image[J].Electrical Engineering in Japan,1998,125(2).
[8] Masato Ukai.Development of image processing technique for detection of tunnel wall deformation using continuously scanned image[R].Railway Technical Research Institute,2000.
[9] Masato Kuai.Advanced inspection system of tunnel wall deformation using image processing[R].Railway Technical Research Institute,2007.
[10] Wehr A,Lohr U.Airborne laser scanning:an introduction and overview[J].ISPRS Journal of Photogrammetry& Remote Sensing,1999,54(2).
該系統采用的圖像分析算法如下:首先對源圖像進行直方圖均衡化,以增強圖像的對比度,應用Sobel和Laplacian檢測算子識別裂縫邊緣,再應用Gaussian濾波器降噪,通過設定的閾值識別裂縫,最后應用圖搜索算法提取裂縫。該系統可檢測裂縫的寬度、長度和走向等參數。但由于采用的只是通用的圖像處理方法,未考慮裂縫的幾何形態,算法不完善,病害識別準確度不高。
中圖分類號:U457
文獻標志碼:A
文章編號:1671-2668(2016)03-0241-05
基金項目:?河南省交通運輸廳科技計劃項目(2012D07)
收稿日期:2016-02-02