基于Ansys Workbench的起重機吊臂結構全伸臂工況的有限元分析
2016-06-13 02:55:56李春風董慶華李少杰郝清龍王宇飛
承德石油高等專科學校學報 2016年2期
關鍵詞:有限元
李春風,董慶華,李少杰,郝清龍,王宇飛,曹 碩
(承德石油高等專科學校 工業技術中心,河北 承德 067000)
?
基于Ansys Workbench的起重機吊臂結構全伸臂工況的有限元分析
李春風,董慶華,李少杰,郝清龍,王宇飛,曹碩
(承德石油高等專科學校 工業技術中心,河北承德067000)
摘要:通過吊臂吊載,起重機能夠實現大高度、大幅度的作業,吊臂是起重機的最主要承載構件之一,吊臂的分析研究對于起重機的結構優化起到了大的作用。以50 t起重機吊臂為例,借助軟件Ansys Workbench對吊臂結構的全伸臂工況進行有限元分析,得到其變幅平面內各處位移和應力,為結構的改進和優化提供了一定的參考。
關鍵詞:吊臂;Ansys Workbench;有限元
通過吊臂吊載,起重機能夠實現大高度、大幅度的作業,吊臂是起重機的最主要承載構件之一,吊臂的強度對于起重機承載最大起重量時的整機起重性能起到了決定性的作用,吊臂自重對于起重機整機傾覆穩定性有著最直接的影響,吊臂結構的設計將直接影響整個起重機的性能,所以對吊臂進行有限元分析是很有必要的。
1吊臂工作原理、結構尺寸及其受力分析
1.1吊臂工作原理
起重機升降重物,是利用吊臂頂端的滑輪組支撐卷揚鋼絲繩來懸掛重物,利用吊臂的長度和傾角的變化來改變工作半徑和起升的高度,如圖1所示。吊臂有兩節、三節、四節、五節等不同形式,通過變幅機構來實現俯仰功能,如圖2所示。起重臂頂端可以加滑輪,實現吊鉤單倍率工作,提高工作速度。另外,起重臂頂端還可以同時加副臂,實現更大的起升高度。

1.2吊臂結構尺寸
本文涉及到起重機基本參數為:回轉速度:2 r/min,行走速度:70 km/h ,最大起重量50 t,最大起重力矩721.3 kNm,最大起升高度38.5 m,基本臂(第1節臂)舉升高度為10.4 m;舉升臂的總長為38 m,基本臂長10.2 m。舉升臂為四節,結構見圖3,四節的尺寸依次為:350×480、385×540、420×600、455×660(mm);起重舉升臂的主體材料為合金結構鋼,適當的選取16Mn進行加固,截面形狀采用如圖4 所示的“U”型截面。

1.3吊臂的受力分析
1)變幅平面內的載荷分析
起升繩拉力T:
(1)
式(1)中:φ1為吊臂動力系數;m為吊鉤滑輪組的倍率;η為滑輪組效率;Q0為額定起重質量;G0為吊鉤質量;g為重力加速度
將起升繩拉力T分解,平行于吊臂軸線方向的分力為T1=Tcosβ,垂直于吊臂軸線方向的分力為T2=Tsinβ;將垂直載荷Q分解,垂直于吊臂軸線方向的分力為Q1=Qcosβ,平行于吊臂軸線方向的分力為R=Qsinβ。其中β為伸縮臂在變幅平面傾角,Q為由起升載荷以及吊臂重量引起的垂直載荷。
伸縮臂有兩個支點,分別是臂根車架之間的鉸接點以及吊臂與變幅油缸之間的鉸接點,因此可把吊臂簡化為簡支外伸梁進行分析。MLY為垂直力Q和起升繩拉力T對吊臂軸線偏心引起的力矩如公式(2)所示:
MLY=Qge1sinβ-Te2cosβ
(2)
式(2)中:e1為臂端定滑輪與吊臂軸線的偏心距;e2為臂端導向滑輪與吊臂軸線的偏心距。
2)旋轉平面內的載荷分析
在旋轉平面內,伸縮臂可視為一個端部自由、根部固定的懸臂梁。與在變幅平面受力情況一樣,其承受的軸向力為T=R+T1,R是當吊臂旁彎時不變方向的軸向力,T1是吊臂旁彎時變方向軸向力,其中R=QsinβT1=Tcosβ
在旋轉平面,伸縮臂的側向載荷為貨物的偏擺載荷,側向力SY如公式(3)所示:
SY=(Q0+G0)gtgα
(3)
其中α為旋轉平面擺角。
沒有安裝副臂時,力矩MLX=0,此時側向力SY中的貨物偏擺載荷S作用于臂端定滑輪的軸心處,吊臂受到扭矩MN作用,如公式(4)所示:
MN=(Q0+G0)ge1tgα
(4)
帶入實際工況數據,得到吊臂受力匯總見表1。

表1 吊臂受力匯總
2應用Ansys Workbench對吊臂結構進行有限元分析
2.1前處理
起重機吊臂由眾多的機械零部件組成,可以看作是由桿件、板塊、殼體、塊體等或由它們組合組成的結構。ANSYS Workbench具有優秀的實體幾何建模功能并提供了強大的網格劃分工具,通過ANSYS Workbench軟件,可以方便地構造出吊臂的幾何模型和有限元模型,并對其進行準確的分析。
2.1.1建模
Design Modeler 是Ansys Workbench的建模平臺,其用戶界面與常用的三維CAD軟件非常相似,主要功能集成于各項主菜單中[1]。DesignModeler不僅允許用戶配置個人窗口來滿足使用要求如利用鼠標就可以對窗口進行移動和調整,還提供了多項輔助工具如選擇、拾取、組元、局部坐標系、工作平面等。利用DesignModeler進行建模不僅能夠建立準確的幾何模型而且能夠大大減少建模時間。
建模時要考慮吊臂的重心位置和自身重量,必須以吊臂的真實工況進行建模,即先計算出吊臂的仰角θ(即吊臂的真實工況位置)的大小,再激活workplane,然后將workplane旋轉θ角,在workplane內進行造型[3]。
吊臂既包括各節臂結構也包括伸縮系統各個傳動件,結構比較復雜。若對整個吊臂進行完整建模的話,建模和分析會非常復雜,因此本文對吊臂結構進行了合理的簡化。因為對于吊臂強度計算主要是分析吊臂危險截面處和各結構搭接處的局部應力分布,因此在進行有限元分析時可將吊臂前、后部結構進行簡化,去除一些不必要的零件結構,使得整個吊臂只包含筒體和滑塊結構,在保證相關設計參數和結構特征的情況下,不在模型中建立吊臂的伸縮機構[4]。 由于各節臂的筒體是由薄板構成的,因此建模時取中面尺寸進行造型,而基本臂的尾部及四節臂的頭部結構復雜且剛性大,故建模時將其簡化成了實體。利用ANSYS Workbench強大的造型功能,建立了吊臂簡化結構的幾何模型。
2.1.2各節臂與滑塊間的連接簡化
吊臂共有四節,各節臂相互之間可以滑動,每節之間有3個滑塊,通過各節臂搭接處滑塊的接觸和擠壓來實現力的傳遞。有兩個思路,可以實現建模。思路1是建立接觸單元,思路2是利用節點處的自由度耦合來實現,本文采用后者。添加約束使得吊臂和各個滑塊之間保持接觸,沿著接觸面可以相對滑動,相應的節點(Coincident Node)間沿著接觸面的法線方向自由度是耦合的,切線方向自由度是釋放的。利用各節臂和相應的滑塊在同一個節點位置的耦合,實現滑塊和吊臂對應各個節點的耦合模擬。
2.1.3單元選取和網格劃分
輸入材料屬性:查閱機械設計手冊,選取相應的材料系數為:彈性模量E=2×105MPa,泊松比μ=0.3,密度ρ=7 850 kg/m3。根據材料系數定義相應的材料參數。
實體選用8節點的6面體單元Solid45,板采用Shell63板殼單元。Shell63為4節點的線彈性單元,遵循基爾霍夫假設,即變形前垂直中面的法線且變形后仍然與中面相垂直,且該單元能夠同時考慮中面內的膜力以及彎曲變形,與吊臂的實際受載情況比較符合。
進行網格劃分時,對吊臂的各個節臂筒體采用映射(mapped)和自由(free)的方式;滑塊處為保證其形狀為六面體,本文采用掃掠(sweep)的方式進行劃分。整個網格的劃分,為避免形狀畸形,應保證控制單元形狀盡可能規則。
由于每個節臂之間都有搭接部分,而且大部分節臂的板厚都不一樣,不易選中,若是每塊板逐個進行網格劃分,不僅效率低下,計算繁瑣,而且很容易出現錯誤,為此在建模前應先在實體模型上指定對應的屬性,即將需要劃分的單元、材料特性、實常數等賦予所有的實體,然后再對所有塊、板等單元進行網格劃分,最終得到吊臂所對應的有限元模型。
2.2邊界條件
2.2.1施加載荷
吊臂所受的載荷包括側載、吊重、鋼絲繩在臂頭的拉力;風載、液壓缸的作用力以及伸縮機構鋼絲繩的拉力。其中風載載荷作用在吊臂側面上,而其它的載荷則需要加到各載荷相應位置的節點上或關鍵點上,為了使這些載荷加載點能成為節點,需在相應節點的位置處創建硬點(Hard points)。此外,由于鋼絲繩在臂頭的拉力及伸縮機構鋼絲繩拉力的方向與整體坐標系方向不一致,為了便于加載荷,在建模時還需要旋轉這些節的點坐標系。
2.2.2施加約束
在基本臂尾部與轉臺鉸接處,變幅液壓缸鉸點處,對ROTY、ROTZ 2個方向的轉動自由度和UX、UY、UZ 3個方向平移自由度進行約束,釋放繞銷軸中心回轉的轉動自由度ROTX。同時為保證臂的剛度和強度,設定應力Stressm和位移Deflm為狀態變量,通過控制應力和位移來保證臂滿足剛度和強度要求。
約束條件包括強度條件和剛度條件,強度條件為σ≤[σ],式中σ為危險點最大應力; [σ]為材料許用應力;剛度條件為DEFLM≤[f],式中DEFLM—變幅平面內最大位移;[f]—變幅平面內允許最大位移。
2.3后處理
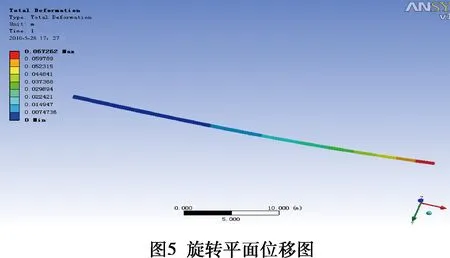
Ansys Workbench的后處理中Geometry按鈕控制云圖的顯示方法,共有四個可用選項:Exterior是默認的顯示方式并且是常用的方式,IsoSurfaces對于顯示相同的值域是非常有用的,Capped IsoSurfaces 是指刪除了模型的一部分后的顯示結果,刪除的部分是可變的,高于或者低于某個指定值的部分被刪除,Slice Planes允許用戶去真實的去切模型。本文采用第一個選項。得到后處理云圖結果:如圖5所示的旋轉平面位移圖,如圖6所示的變幅平面位移圖。可見旋轉平面最大撓度為672.62 mm,變幅平面最大撓度為780.31 mm,最大撓度均發生在吊臂最右端。得到圖7所示變幅平面VON MISE應力圖。可見變幅平面最大應力發生在圖中紅色區域,大小為[σ]max=541.5 MPa<[σ]H=885 MPa


3結論
本文討論了Ansys Workbench在起重機吊臂結構全伸臂工況的有限元分析中的應用。通過合理簡化了吊臂結構,建立了起重機吊臂結構全伸臂工況的幾何模型,然后根據材料的泊松比、彈性模量以及實際工況中承受的載荷等參數劃分有限元網格,并根據吊臂運動和傳力特點施加一定的邊界條件,從而完成吊臂結構從幾何建模、網格劃分到施加邊界條件的有限元建模過程,最終獲得了旋轉平面位移圖,變幅平面位移圖和變幅平面VON MISE應力圖,其中創新之處在于利用節點耦合技術來模擬滑塊和各節臂之間的連接,分析結果與經驗相符,為結構的設計和優化提供了一定的參考。
參考文獻:
[1]浦廣益.Ansys Workbench基礎教程與實例詳解[M].北京:中國水利水電出版社,2010.
[2]李春風,董慶華,侯和龍.ANSYS軟件在連桿有限元分析中的應用[J].承德石油高等專科學校學報,2015(2):20-23.
[3]楊晶,李衛民.汽車起重機吊臂的有限元分析[J].遼寧工學院學報,2007,27(3):195-198.
[4]郭耀松,張新忠.起重機吊臂結構的有限元分析[J].農業裝備與車輛工程,2009(7):9-11.
Finite Element Analysis of Crane Boom Device in Full Arm Condition Based on ANSYS Workbench
LI Chun-feng, DONG Qing-hua, LI Shao-jie,HAO Qing-long, WANG Yu-fei, CAO Shuo
(Industrial Technology Center, Chengde Petroleum College, Chengde 067000, Hebei, China)
Abstract:As the main load bearing component of the crane, boom is used to elevate load, and to achieve great height and range operations. A research on boom plays an important role in bettering the structure of a crane. Taking the 50 ton crane boom for example, with the help of Ansys Workbench, finite element analysis of crane boom device in full arm condition is researched, and the displacement and stress in different positions in the variable amplitude plane is obtained, which will provide a reference for subsequent structure developing and optimization.
Key words:boom; Ansys Workbench; finite element
收稿日期:2015-10-28
作者簡介:李春風(1981-),男,河北石家莊人,承德石油高等專科學校工業技術中心講師,碩士,主要從事機械設計、有限元、可靠性等方面研究。
中圖分類號:TH21
文獻標識碼:A
文章編號:1008-9446(2016)02-0017-05
猜你喜歡
艦船科學技術(2022年20期)2022-11-28 08:19:18
數學物理學報(2022年4期)2022-08-22 04:09:28
減速頂與調速技術(2020年4期)2020-11-22 07:20:26
上海節能(2020年3期)2020-04-13 13:16:16
石油化工建設(2019年6期)2020-01-16 08:03:42
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(2016年3期)2016-06-05 09:36:08
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18