反輻射導彈對抗雷達關機技術研究
2016-06-21 03:01:46楊林沖王清海
航空兵器 2016年1期
楊林沖,王清海
(1. 中國空空導彈研究院,河南 洛陽 471009; 2. 海軍駐洛陽地區航空軍事代表室,河南 洛陽 471009)
?
反輻射導彈對抗雷達關機技術研究
楊林沖1,王清海2
(1. 中國空空導彈研究院,河南 洛陽471009; 2. 海軍駐洛陽地區航空軍事代表室,河南 洛陽471009)
摘 要:在分析反輻射導彈對抗雷達關機所采用的若干技術方案各自特點的基礎上,指出被動雷達與捷聯慣導復合是第三代現役反輻射導彈采用的主流技術,采用多模導引頭復合制導是未來一個重要的發展方向。對上述兩種方式的機理分別進行了研究,給出了相應的研究結論。對采用多模導引頭復合制導需重點考慮的問題進行了分析,對反輻射導彈抗關機的發展歷程進行了總結,指出提高機動性對于采用復合導引頭制導模式的反輻射導彈意義重大。
關鍵詞:反輻射導彈;雷達關機;捷聯慣導;復合導引頭;濾波算法;掃描
0引言
反輻射導彈是以被攻擊雷達所輻射的電磁波為導引信息的一種防空壓制武器,具有作用距離遠、隱蔽性能好、可全天候使用等優點。20世紀60年代初,美國研制出“百舌鳥”反輻射導彈,并首先在越南戰場上使用。起初“百舌鳥”導彈對越南雷達陣地的摧毀作用十分明顯,后來由于對方雷達采取突然關機、大甩頭等措施,使其失去了應有的攻擊作用。究其原因,主要是由于反輻射導彈過分地依賴于目標所輻射的電磁波,因此一旦目標雷達采取關機等措施,而彈上不采取相應的對抗手段,其命中精度將會大大降低。為此,抗雷達關機能力得到了世界軍事強國的普遍重視,先后研制出的較先進的反輻射導彈大都具有某種程度的抗雷達關機能力。如美制“標準”反輻射導彈可在雷達關機后,通過載機上的目標探測定位系統所確定的雷達位置,由載機發出指令繼續制導導彈飛向目標; “哈姆”反輻射導彈利用其本身所具有的高速飛行性能(Ma>3)及慣導系統來對抗雷達關機; 法國的“阿爾瑪特”、蘇聯的“王魚”也采用了慣導系統; 而英法聯合研制的“馬特爾”則采用了被動雷達+電視制導的復合制導形式; 英國的“阿拉姆”也是利用彈上慣導系統來對抗雷達關機。
1反輻射導彈的兩種抗關機作戰場景
根據目標雷達實施關機對抗措施的時機和關機持續時間,可以將反輻射導彈抗關機分為兩種作戰場景。
第一種是抗中段關機,在導彈制導飛行的過程中,目標雷達采用突然關機手段,在一段時間內不再向空中輻射電磁波,但在導彈落地之前再次開機。導彈需要在雷達重新開機后迅速捕捉到目標信號并繼續對其實施攻擊,直至命中。
第二種則是抗末端關機,在導彈制導飛行的末期,雷達采用突然關機手段,并且不再開機,直至導彈落地。要求導彈制導系統利用前期被動導引期間獲取的目標位置信息,繼續朝向目標雷達制導飛行,仍能以一定的概率毀傷目標。
一般來講抗中段關機相比末端關機更容易一些,主要原因是二者對導彈的要求不同,前者只要求目標雷達重新開機時,導引頭能夠重新捕獲、跟蹤目標使導彈能夠重新轉入被動尋的制導即可。由于寬帶導引頭的波束寬度一般較寬,因此角度截獲不成問題。該作戰場景主要強調的是導引頭的自動目標分選能力,不涉及制導精度的問題; 而后者的要求相對較高,在目標信號源消失的情況下還要求導彈達到毀傷目標的制導精度,技術上存在較大的挑戰。因此一般意義上的反輻射導彈抗關機指的都是抗末端關機。
2反輻射導彈抗雷達關機的技術方案
反輻射導彈采用的抗雷達關機措施,一般以被動雷達尋的制導為主,復合一種其他制導方式。被動雷達尋的導引頭可以與主動雷達組成被動/主動復合制導,也可與紅外、激光、電視或捷聯慣導等組成復合制導。但從可靠性、技術成熟程度、研制費用和研制周期等幾方面綜合考慮,采用被動雷達復合捷聯慣性制導方案更具優勢。
(1) 慣性制導不受外界干擾,也不依靠外界任何信號,因此是全天候、全自主的。
(2) 相對于激光制導和電視制導,捷聯慣導系統具有可靠性高、體積小、重量輕等特點,且技術實現容易。
(3) 捷聯慣導系統經濟性好,技術成熟度高。
鑒于上述考慮,目前國際上主流的反輻射導彈均采用捷聯慣導(SINS)復合寬帶被動導引頭(PRS)的制導模式,都具備一定的抗關機能力。例如美國的HARM導彈、英國的ALARM和巴西的MAR-1導彈等。
3捷聯慣導復合制導模式抗關機問題
早期采用單模(僅有PRS)導引的反輻射導彈由于沒有配置導航系統而不具備自身及目標的定位能力,在目標關機后對目標的攻擊由原來依靠PRS提供目標角度信息的尋的制導,轉變為保持視線方向不變的追蹤式攻擊,效果不佳。末端抗關機距離很近,一般只有數百米,遠遠不能滿足作戰需要。
3.1捷聯慣導復合制導模式的抗關機機理
隨著捷聯慣導技術的不斷成熟,同時為滿足抗關機的迫切需要,世界主流的反輻射導彈都采用了捷聯慣導(SINS)復合寬帶被動導引頭(PRS)的制導模式,更先進的甚至引入了衛星輔助導航(GPS)。該制導模式抗關機的機理如下: 在目標雷達關機前,彈載計算機利用反輻射寬帶被動雷達導引頭的導引信息進行制導,同時利用導彈組合導航系統(SINS/GPS)的位置信息及導引頭的測角信息,采用非線性濾波方法進行目標位置的估計; 雷達突然關機時,利用上一時刻記憶的目標位置信息及組合導航系統的位置信息,使用外推估計值進行制導,按照給定的制導律生成控制指令,繼續引導導彈攻擊并滿足精度要求。
捷聯慣導復合制導模式抗雷達關機的關鍵是目標雷達的被動定位問題,而定位問題實質上是非線性最優濾波問題。反輻射導彈抗雷達關機的原理方框圖如圖1所示。
圖1反輻射導彈抗雷達關機原理方框圖
3.2捷聯慣導復合制導抗關機問題研究結論
應用數字濾波技術,基于SINS/GPS+PRS復合制導模式的反輻射導彈相對于單純依靠PRS制導,抗關機能力在一定程度上得到提高,末端抗關機距離能夠提高到數千米。
基于SINS/GPS+PRS復合制導模式的反輻射導彈在對抗雷達關機時影響脫靶量的因素有: 雷達關機時對目標的定位誤差、關機期間導彈的導航誤差及制導控制系統執行誤差。其中第一項是主要因素,提高SINS的精度、引入衛星制導可以一定程度地提高反輻射導彈的抗關機能力,但作用比較有限。反輻射導彈抗關機問題的核心是如何提高關機時刻導彈對目標被動定位的精度。
控制誤差是導彈控制系統執行控制指令時所產生的誤差,是由方法誤差、測量誤差以及動態滯后等因素引起的,在導彈制導飛行的過程中始終存在且不可避免。導航誤差是導彈飛行過程中導航系統測量自身位置信息時所產的誤差,它與SINS的器件水平直接相關,且與導彈的剩余飛行時間強相關并呈指數關系增長。為了消除SINS長時間的積累誤差,先進的反輻射導彈多采用SINS/GPS組合導航系統。引入GPS后可以將導航誤差控制在3 m左右(CEP)的水平,使得導航誤差與剩余飛行時間無關,這樣就可以減小脫靶量,提高導彈在目標雷達關機后的制導精度。關機時刻的目標定位誤差受機載設備對目標雷達的初始被動定位誤差、被動雷達導引頭測量誤差及被動定位濾波品質等影響。在目前被動雷達導引頭測角精度及濾波處理算法水平之下,目標被動定位誤差本身仍是導致導彈脫靶的主要因素。
國外機載雷達告警裝置測角誤差≤10°,測距誤差≤10%; 機載電子支援裝置的測角誤差≤2°,測距誤差≤10%。當被動雷達導引頭穩定跟蹤目標后,可以很快消除初始被動定位誤差。被動雷達導引頭的測角誤差約為1°~2°(1σ),在較理想的情況下,可以通過被動定位濾波將其提高到0.1°(1σ)左右的水平,對應10 km的距離上的位置誤差約為18 m(1σ)左右,5 km的距離上的位置誤差約為9 m(1σ)左右。
基于SINS/GPS+PRS復合制導模式反輻射導彈的抗關機能力(或者說反輻射導彈對目標的被動定位精度水平)與具體彈道密切相關。例如在相同彈目距離條件下,隨著導彈飛行高度的降低,抗關機距離呈現明顯的降低趨勢,這涉及到濾波器的可觀性問題。因影響因素多,抗末端關機能力不易簡單地用抗關機距離或時間來描述,抗關機距離與關機前復合制導(即由PRS來獲取目標信息)的時間長短、具體的彈道情況(遠近、高低、是否爬升)等直接相關; 在彈道設計上采用一些技術措施可以一定程度上提高反輻射導彈的抗關機能力。本質原因是一定程度上提高了被動定位濾波器的可觀性和收斂特性。
當目標雷達關機時,如果導彈距離目標較遠,或者被動定位的時間偏短,此時導彈對目標雷達的定位誤差可能遠遠超過戰斗部的殺傷半徑,單純依靠捷聯慣導復合制導模式進行坐標攻擊已經不能滿足制導精度的要求。
4多模導引頭復合制導的抗關機問題
多模導引頭復合制導是目前國內外討論最多的一種抗關機方案,它具有目標探測能力強、抗干擾能力強等優點,是反輻射武器最直接有效的抗關機手段,也是對抗雷達誘餌干擾的重要發展方向。但多模復合制導并不是幾種導引頭簡單的并聯或疊加,它涉及到復合模式優化選擇、天線罩技術、邏輯控制系統設計、數據融合等關鍵技術,以及研制周期長、成本控制等問題。
目前國外采用的多模制導抗關機方案中,多采用被動雷達導引頭與紅外、毫米波、電視、激光等制導技術相結合。例如美國海軍主導的“先進反輻射導彈(AARGM)”(即AGM-88E)采用主動毫米波導引頭(MMWS)+被動雷達導引頭(PRS)復合的雙模制導體制; 德國的ARMIGER反輻射導彈則采用了紅外成像(IIR)+被動雷達導引頭(PRS)的復合制導模式。二者各有千秋,ARMIGER采用固體火箭沖壓發動機,最大射程可達200 km,制導精度高,因此戰斗部僅重20 kg,但發展前景不明,相關文獻報道很少。而AGM-88E目前已經完成設計定型,處于小批量裝備階段。在這個過程中出現了一些技術問題,目前正在逐步解決之中。因相關技術高度敏感,很難知道具體的細節,猜想可能與末制導目標自動識別有關。
4.1多模導引頭復合制導的抗關機機理
導彈采用SINS/GPS+PRS/MMWS復合制導模式,在朝向目標制導飛行的過程中,如雷達突然關機,則導彈首先在SINS及GPS的引導下朝著雷達關機前根據被動定位算法推算的或者載機裝訂的目標粗略位置飛行。在合適的距離上(如3 km)毫米波主動雷達導引頭開機工作,在算法推算/初始裝訂的目標位置附近一定范圍內進行掃描、搜索和識別,一旦發現、截獲并穩定跟蹤目標,導彈即由坐標攻擊模式轉變為由MMWS導引的尋的制導模式直至命中目標,因而可大大提高制導精度。如果目標雷達持續工作,則制導系統對PRS和MMWS的導引信息進行數據融合,可明顯改善制導系統的可靠性和抗干擾能力。
另一方面,由于MMWS的引入所具備的區域搜索及目標自動識別能力,使得反輻射導彈的使用更加靈活,甚至可以用來攻擊預先知道概略位置的未開機的防空武器系統。同時在對抗有源誘餌干擾方面也大有用武之地。
相較于傳統的SINS/GPS+PRS制導模式,引入MMWS末制導能夠大幅提高導彈抗關機能力的本質是有效利用了其區域掃描搜索能力。相當于把原來必須將目標精確定位到有效脫靶量之內(典型值15 m )的苛刻要求放寬為只需把目標精確定位到MMWS的搜索范圍內(典型值600 m×600 m),對應的定位精度為300 m,如圖2所示。因此大大降低了對制導系統的壓力,實現了抗關機能力的大幅提高,將原來的幾千米擴大到了十幾千米甚至二十千米以上。
圖2引入MMWS對目標定位要求大幅降低
4.2多模導引頭復合制導需重點考慮的問題
為實現反輻射導彈的多模導引頭復合制導,取得良好的抗關機甚至抗誘餌效果,必須解決好如下問題:
(1) 基于距離高分辨的目標自動識別
對目標的自動識別是多模導引頭復合制導必須解決的第一關鍵技術,它將直接決定著導彈攻擊過程的成敗。其主要過程是: 首先控制MMWS的波束指向估算的目標點,對波束內目標進行檢測。對檢測到的目標,利用距離高分辨、目標輻射信息等構造特征向量,并與數據庫中的制導雷達天線的特征信息進行匹配。如果沒有發現要打擊的目標,則啟動掃描程序按一定規律對周圍一定范圍進行掃描,執行目標檢測、特征匹配和目標確認等流程,直至發現目標; 在確認目標后隨機轉入穩定跟蹤狀態,輸出制導系統所需的目標參數。MMWS對搜索區內目標自動識別、打擊如圖3所示。
對于MMWS主動雷達,目標與誘餌外形等特征存在差異,其散射信號有很大的區別,表現在高分辨距離像上,如擴展長度、散射點相對大小和分布等,利用高分辨距離像可實現有效的鑒別,從而使反輻射導彈具備良好的抗誘餌能力。
圖3MMWS對搜索區內目標自動識別、打擊
(2) MMWS機電式位標器的快速性
PRS探測距離一般比較遠,而MMWS受體制、波長和口徑等多種因素的限制,有效作用距離非常有限,對典型目標作用距離一般只有3 km左右。為保證末端MMWS尋的制導的精度,至少需要2 km左右的末制導飛行過程,這就要求MMWS對于特定區域的搜索必須在1 km左右的飛行時段內完成。對于超音速情況,MMWS對目標可能區域的掃描時間僅有2 s左右。假設MMWS波束寬度1.5°,掃描角速度80 (°)/s,導彈擦地角20°,飛行速度600 m/s,計算出最大搜索區域為500~600 m。當然80 (°)/s的掃描角速度對于機電式位標器存在一定的挑戰。如果將目標的概略定位精度提高,例如提高到150 m(對應的搜索區域降低為300 m×300 m),或者將MMWS的有效作用距離提高到4 km以上,都可以降低對位標器快速性設計要求。這實際上是總體指標間的平衡、折衷問題。對MMWS區域搜索的快速性要求如圖4所示。
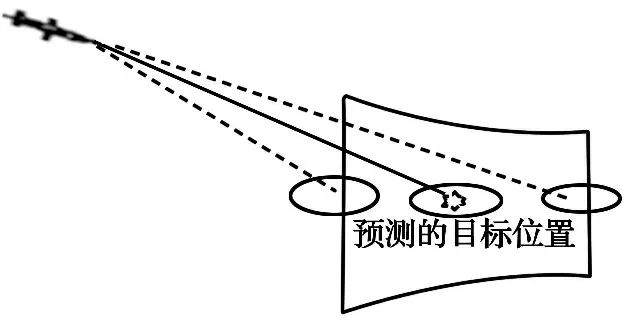
圖4對MMWS區域搜索的快速性要求高
(3) 反輻射導彈的機動能力要求
如前所述MMWS在完成對目標雷達的識別、截獲后,最終實現穩定跟蹤時距離目標已經很近,如果目標定位精度差導致其處于比較靠近區域邊緣的位置,對導彈的機動能力將是一個嚴峻的考驗,這一點與通常意義上的空地導彈是有區別的。
(4) 反輻射導彈的末端彈道優化設計
理論分析及數字仿真研究表明,對于采用近炸引信的反輻射導彈,從引戰配合角度來講,希望導彈的著地角越大越好。而另一方面,著地角越大,導彈需用過載越大,MMWS截獲距離卻越小,截獲距離小又反過來需要更大的過載。這樣在MMWS穩定跟蹤目標之前,不宜將導彈著地角控制太大,理想的彈道策略是在MMWS截獲目標之前,將導彈的著地角控制在20°~30°以下,穩定跟蹤后再逐步將導彈著地角提高到50°以上,這涉及到末端彈道的優化設計問題。
5結論
以“百舌鳥”為代表的第一代反輻射導彈基本不具備抗關機能力。另外其被動雷達導引頭靈敏度低,只能跟蹤雷達目標波束主瓣,目標的一個大甩頭動作甚至都可能導致攻擊過程的失敗。
以“哈姆”為代表的第三代反輻射導彈引入了慣性導航系統,具備一定的抗關機能力。但由于受到被動導引頭測角精度、被動定位數字濾波器收斂速度、具體的攻擊彈道及被動導引時間長短等因素的影響,抗關機能力雖有較大的改善,但仍然不能滿足實戰需要。
以“先進反輻射導彈(AARGM)”為代表的三代后反輻射導彈引入主動毫米波復合導引頭,具備了良好的抗關機能力和抗誘餌能力,當然成本也會明顯上升。
引入主動毫米波復合導引頭的先進反輻射導彈必須解決好基于距離高分辨的目標自動識別、機電式位標器掃描快速性、導彈機動能力和末端彈道優化等關鍵技術,方能閉合其整個制導過程。
如果導彈本身具有較強的機動能力,可以明顯降低目標的概略位置估算精度要求、MMWS對典型目標的截獲距離要求以及機電式位標器掃描快速性的設計壓力。
參考文獻:
[1] 楊林沖.慣導精度對反輻射導彈抗關機能力的影響研究[J]. 戰術導彈技術,2011(1): 85-88.
[2] 王榕,楊林沖,魯建輝.毫米波導引頭在空地末制導中捕獲區與縱向機動能力分析[J]. 電光與控制, 2014,21(7): 78-80.
[3] 宿修鵬,楊軍,王蘊慧. 空地反輻射導彈抗雷達關機方案研究[J] .科學技術與工程, 2008(10): 2620-2623.
[4] 楊淑君,張娟娟,于云峰,等.基于UKF的反輻射導彈抗機動雷達短時關機仿真研究[J]. 飛行器測控學報,2010, 29(1): 39-43.
[5] 湯華,曲長文.反輻射導彈抗目標雷達關機方法和能力分析[J] .彈箭與制導學報,2009, 29(1): 260-263.
[6] 李輝,倪保航,張兆寶,等.一種新的反輻射導彈抗雷達關機制導方案[J].飛航導彈, 2009(10): 46-49.
[7] 朱學平,楊軍,孫杰,等.UKF在反輻射無人機抗目標雷達關機中的應用[J] .火力與指揮控制,2009, 34(7): 100-102.
[8] 車夢虎.反輻射導彈導引頭關鍵技術及發展趨勢研究[J].航天電子對抗,2008, 24(4): 5-8.
[9] 劉琪. 美軍反輻射導彈發展歷程研究及啟示[J].航空兵器,2009(5): 11-14.
[10] 王龍,靳玲,孫衛國,等. 一種反輻射空地導彈距離濾波算法[J]. 航空兵器,2011(6): 47-48.
Research on against Radar Shutdown Technique of Anti Radiation Missile
Yang Linchong,Wang Qinghai
(1. China Airborne Missile Academy, Luoyang 471009, China;2. Aeronautical Military Representative Office of Navy in Luoyang, Luoyang 471009, China)
Abstract:The characteristics of several techniques against radar shutdown of anti radiation missile(ARM) are analyzed. Based on this, it points out that the mainstream technique today is the compound guidance mode of passive radar seeker(PRS) and strapdown inertial navigation system(SINS), and one of the development trend in the future is the multimode seeker guidance mode. The principles of the two modes above are studied and the corresponding conclusions are given. The main problems of adopting multimode seeker guidance mode are analyzed, the development progress of ARM against radar shutdown is summarized, and the importance of increasing manuverbility for ARM adopting multimode seeker is noted.
Key words:ARM; radar shutdown; SINS; multimode seeker; filter algorithm; scanning
DOI:10.19297/j.cnki.41-1228/tj.2016.01.002
收稿日期:2015-04-02
作者簡介:楊林沖(1970-),男,河南沁陽人,研究員,研究方向為飛行器總體設計、制導與控制。
中圖分類號:TJ761.1+6
文獻標識碼:A
文章編號:1673-5048(2016)01-0013-05