基于魯棒軌跡跟蹤的直/氣復(fù)合魯棒控制設(shè)計(jì)
2016-06-21 03:00:04張金鵬曹有亮
航空兵器 2016年1期
邵 雷,張金鵬,曹有亮
(1 空軍工程大學(xué) 防空反導(dǎo)學(xué)院,西安 710051; 2 中國(guó)空空導(dǎo)彈研究院,河南 洛陽(yáng) 471009)
?
基于魯棒軌跡跟蹤的直/氣復(fù)合魯棒控制設(shè)計(jì)
邵雷1,張金鵬2,曹有亮2
(1 空軍工程大學(xué) 防空反導(dǎo)學(xué)院,西安710051; 2 中國(guó)空空導(dǎo)彈研究院,河南 洛陽(yáng)471009)
摘 要:針對(duì)直接力/氣動(dòng)力復(fù)合姿態(tài)控制問題,將魯棒軌跡跟蹤控制與動(dòng)態(tài)逆控制相結(jié)合,設(shè)計(jì)了一種基于魯棒軌跡跟蹤的直/氣復(fù)合魯棒控制姿態(tài)控制方法。該控制方法將魯棒軌跡跟蹤控制與動(dòng)態(tài)逆控制有機(jī)融合進(jìn)行虛擬控制設(shè)計(jì),在慢回路動(dòng)態(tài)逆設(shè)計(jì)的基礎(chǔ)上引入魯棒軌跡跟蹤控制,抑制直接力控制對(duì)氣動(dòng)力控制的干擾,提高系統(tǒng)的魯棒性。仿真研究表明,所設(shè)計(jì)的控制算法具有較好的控制效果,能夠有效提高系統(tǒng)的魯棒性。
關(guān)鍵詞:復(fù)合控制;動(dòng)態(tài)逆控制;軌跡跟蹤控制;魯棒性
0引言
隨著現(xiàn)代戰(zhàn)爭(zhēng)的發(fā)展,空中威脅日益增強(qiáng),彈道導(dǎo)彈、防區(qū)外超低空突襲巡航導(dǎo)彈以及臨近空間高超聲速巡航導(dǎo)彈等空襲武器的使用,對(duì)空天防御攔截器技術(shù)的發(fā)展提出了更高的要求,特別是對(duì)彈道導(dǎo)彈的攔截更期望攔截器具有動(dòng)能殺傷的能力[1]。這些新需求對(duì)攔截武器制導(dǎo)控制精度提出了更高的要求,攔截器只有具有大的機(jī)動(dòng)能力和快的響應(yīng)速度才能滿足這些需求,而采用純氣動(dòng)力控制方式將難以滿足。
在臨近空間,采用直接力/氣動(dòng)力復(fù)合控制是一種有效的控制方式[2]。當(dāng)前,對(duì)于直接力/氣動(dòng)力復(fù)合控制的研究主要集中在兩個(gè)方面,一是對(duì)于復(fù)合控制指令分配與發(fā)動(dòng)機(jī)開關(guān)機(jī)策略的研究,受到復(fù)合控制方式、配置的影響,發(fā)動(dòng)機(jī)開關(guān)機(jī)策略以及指令產(chǎn)生方式也不同; 二是對(duì)于復(fù)合控制條件下控制算法的設(shè)計(jì)研究,通過設(shè)計(jì)合理的控制算法發(fā)揮復(fù)合控制的優(yōu)勢(shì),在保證系統(tǒng)的穩(wěn)定性以及魯棒性的同時(shí),提高系統(tǒng)的響應(yīng)性能。
在實(shí)際控制系統(tǒng)設(shè)計(jì)中,兩種控制方式之間存在強(qiáng)烈的耦合作用,為了得到理想的控制效果,必須對(duì)兩種控制方法的控制策略、控制算法進(jìn)行合理設(shè)計(jì)。一些學(xué)者對(duì)直/氣復(fù)合控制問題進(jìn)行了研究,文獻(xiàn)[3]采用自適應(yīng)反演方式設(shè)計(jì)虛擬控制律,并通過控制分配的方式將控制量分解到執(zhí)行機(jī)構(gòu); 文獻(xiàn)[4]采用滑模控制方法進(jìn)行控制律設(shè)計(jì); 文獻(xiàn)[5]采用反饋線性化與極點(diǎn)配置方法進(jìn)行控制律設(shè)計(jì)。然而,這些控制方法設(shè)計(jì)時(shí)沒有考慮直接力與氣動(dòng)力之間的相互干擾,這種干擾將對(duì)飛行器的飛行品質(zhì)產(chǎn)生強(qiáng)烈的影響[6-7]。針對(duì)該問題,文獻(xiàn)[8]通過將傳統(tǒng)的H∞控制與最優(yōu)輸出跟蹤控制相結(jié)合來抑制干擾; 文獻(xiàn)[9]利用非線性干擾觀測(cè)器對(duì)干擾進(jìn)行估計(jì),并通過前饋補(bǔ)償消除外部干擾對(duì)系統(tǒng)的影響,但當(dāng)干擾變化劇烈時(shí)估計(jì)效果不是很理想。
本文針對(duì)復(fù)合控制導(dǎo)彈姿態(tài)控制中直接力與氣動(dòng)力的干擾問題,將動(dòng)態(tài)逆控制與魯棒軌跡跟蹤控制相結(jié)合設(shè)計(jì)直/氣復(fù)合控制方法,在慢回路中引入魯棒軌跡跟蹤,在保證算法精度的同時(shí)提高其抗干擾性性能。
1復(fù)合控制系統(tǒng)數(shù)學(xué)建模
考慮末制導(dǎo)段導(dǎo)彈的姿態(tài)控制問題,由于末制導(dǎo)段導(dǎo)彈主發(fā)動(dòng)機(jī)已關(guān)機(jī),同時(shí)末制導(dǎo)時(shí)間較短,可假定導(dǎo)彈的質(zhì)量和速度不發(fā)生變化,采用文獻(xiàn)[10]中導(dǎo)彈運(yùn)動(dòng)模型進(jìn)行研究,經(jīng)過合理變換可以得到彈體坐標(biāo)系下導(dǎo)彈姿態(tài)運(yùn)動(dòng)數(shù)學(xué)模型描述如下:
(1)
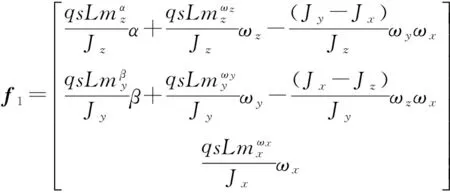
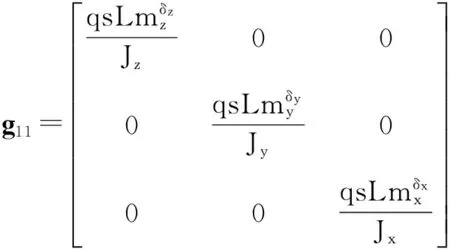
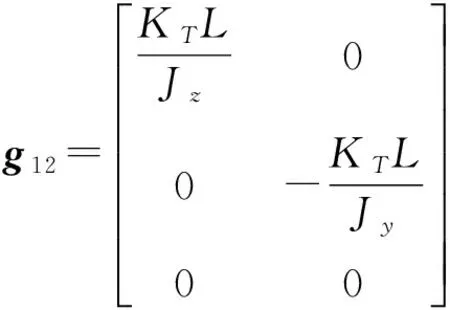
其中:α,β,γ分別為攻角、側(cè)滑角,滾轉(zhuǎn)角;δx,δy,δz分別為副翼、方向舵、升降舵的偏轉(zhuǎn)角;ωx,ωy,ωz分別為導(dǎo)彈繞彈體坐標(biāo)系ox1,oy1,oz1軸的轉(zhuǎn)動(dòng)角速度;dα,dβ,dγ分別為攻角、側(cè)滑角、滾轉(zhuǎn)角的干擾項(xiàng);Tz,Ty為彈體系下的直接力;Jx,Jy,Jz為導(dǎo)彈對(duì)彈體坐標(biāo)系各軸的轉(zhuǎn)動(dòng)慣量。
2基于魯棒軌跡跟蹤的復(fù)合控制律設(shè)計(jì)
在控制算法的設(shè)計(jì)中,結(jié)合直接側(cè)向力只在離散的點(diǎn)起作用的特點(diǎn),為使控制算法設(shè)計(jì)變得簡(jiǎn)單,將直接力控制與氣動(dòng)力控制進(jìn)行融合,把復(fù)合控制問題轉(zhuǎn)化為虛擬控制設(shè)計(jì)問題,然后對(duì)虛擬控制進(jìn)行分配。
考慮導(dǎo)彈姿態(tài)控制過程中,舵偏角δ的改變對(duì)快變量ω影響顯著,而對(duì)慢變量θ影響很小,但ω的變化對(duì)θ卻有很大影響,根據(jù)時(shí)標(biāo)分離原理,可將導(dǎo)彈控制系統(tǒng)設(shè)計(jì)分為快、慢兩個(gè)回路; 同時(shí),在控制算法設(shè)計(jì)時(shí),考慮由于直接力與氣動(dòng)力之間存在耦合效應(yīng),相互之間存在較強(qiáng)的干擾,快回路的控制誤差將融入到慢回路中。基于此,在保證系統(tǒng)響應(yīng)性能的同時(shí),為提高系統(tǒng)的魯棒性,本文將采用魯棒軌跡跟蹤的方法進(jìn)行慢回路控制律設(shè)計(jì),以提高系統(tǒng)魯棒性。
2.1快回路動(dòng)態(tài)逆控制律設(shè)計(jì)
快回路狀態(tài)方程可以表示為
(2)
快回路控制律設(shè)計(jì)的目的是對(duì)快變量x1進(jìn)行線性化解耦控制,使得閉環(huán)后的快變量動(dòng)態(tài)特性為如下形式:
(3)
(4)
回路帶寬的選取要符合工程實(shí)際的需要。在快回路設(shè)計(jì)中,首先必須使?fàn)顟B(tài)變量能夠較快地跟蹤控制輸入信號(hào)。其次,快回路帶寬的選擇要考慮舵系統(tǒng)的工作情況,符合工程實(shí)際,其信號(hào)的大小及其變化率要考慮舵系統(tǒng)非線性飽和因素的影響。另外,頻帶值的選取還受飛機(jī)高頻結(jié)構(gòu)模態(tài)的限制及傳感測(cè)量器件的影響。
2.2基于魯棒軌跡跟蹤的慢回路控制律設(shè)計(jì)
考慮直接力與氣動(dòng)力之間的相互耦合以及相互影響,當(dāng)存在參數(shù)不確定性和外部干擾,式(2)可描述為
(5)
令
ξ=Δf1+Δg1u1+Ω1
式中:Δf1,Δg1為模型的不確定性部分;Ω1為外部干擾。

式中:v2=[v2,α,v2,β,v2,γ]T為慢回路的期望的動(dòng)態(tài)特性,取
v2=Ks(x2c-x2)
式中:Ks為3×3的對(duì)角陣,對(duì)角元素為慢回路各通道的頻帶值。
通過上述分析,并考慮慢回路本身的不確定性,可得整個(gè)不確定性系統(tǒng)如下:
(6)
式中:Δf2,Δg2為模型的不確定性部分;Ω2為慢回路的外部干擾。
考慮到系統(tǒng)的總不確定性及外界干擾均可由慢回路反映的特點(diǎn),對(duì)慢回路進(jìn)行控制律設(shè)計(jì)時(shí)必須考慮其魯棒性。式(6)中慢回路動(dòng)力學(xué)方程的另一種表達(dá)式為
(7)
式中:d=Δf2+Ω2+g2Δx1+Δg2(u2+Δx1)為整個(gè)系統(tǒng)的總不確定性。
假設(shè): 式(7)中d有界且存在一階導(dǎo)數(shù);x2的期望的動(dòng)態(tài)x2d連續(xù)有界,且具有連續(xù)可微的二階導(dǎo)數(shù)。
對(duì)式(7)第一個(gè)式子求導(dǎo),經(jīng)過計(jì)算可得

(8)
f2(x2)-x1]
則式(8)可寫為
(9)
針對(duì)式(9)設(shè)計(jì)逆動(dòng)力學(xué)補(bǔ)償為
(10)
將式(10)代入式(9),得
(11)
式中:e=x2-x2d;τ為輔助控制輸入信號(hào)。
定義:
(12)
其中: a>0。
對(duì)式(12)求導(dǎo),并將式(11)代入可得
(13)
(14)


(15)
式(15)的反饋控制律設(shè)計(jì)為
τ=D-1(x2)[-λη-H(x)η-?-ν]
(16)
(17)
針對(duì)上述虛擬控制指令,通過指令分解將虛擬控制分解為氣動(dòng)力和直接力控制指令兩部分。氣動(dòng)力指令直接操縱導(dǎo)彈的舵系統(tǒng)實(shí)現(xiàn)舵面的控制; 對(duì)于直接力控制,如何根據(jù)虛擬控制生成發(fā)動(dòng)機(jī)點(diǎn)火指令,對(duì)于最終的控制效果具有重要影響。本文結(jié)合發(fā)動(dòng)機(jī)0-1工作的特點(diǎn),采用文獻(xiàn)[11]中的PSR產(chǎn)生脈沖調(diào)制信號(hào)進(jìn)行發(fā)動(dòng)機(jī)組點(diǎn)火設(shè)計(jì),具體方法不再贅述。
3仿真分析
使用復(fù)雜模型對(duì)設(shè)計(jì)的復(fù)合控制律進(jìn)行數(shù)字仿真,以驗(yàn)證模型簡(jiǎn)化的合理性及復(fù)合控制律的有效性。仿真條件選取如下:
快回路帶寬: k1=diag{20, 20, 20};
脈沖發(fā)動(dòng)機(jī)參數(shù): 穩(wěn)態(tài)推力T0=3 000N, 工作時(shí)間τ0=25ms;
仿真初值: α=0°,β=0°,γ=5°,ωz=0 (°)/s,ωy=0 (°)/s,ωx=0 (°)/s,δz=0°,δy=0°,δx=0°。
為驗(yàn)證復(fù)合控制律的跟蹤特性和穩(wěn)態(tài)性能,取指令信號(hào)為正弦信號(hào),分別在標(biāo)稱條件下和參數(shù)攝動(dòng)-50%,且在慢回路中加入均值為10 (°)/s,方差為0.5的正態(tài)分布隨機(jī)噪聲的條件下進(jìn)行仿真,仿真結(jié)果如圖1~10所示。
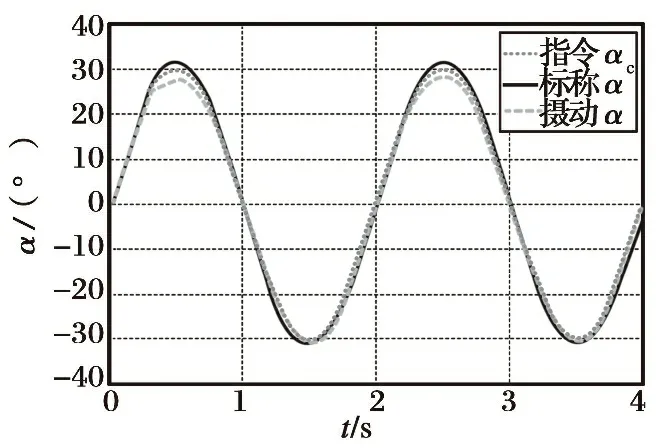
圖1攻角響應(yīng)曲線
從圖1~ 2可以看出,在導(dǎo)彈氣動(dòng)參數(shù)攝動(dòng)和外界干擾的雙重作用下,系統(tǒng)能夠較好地跟蹤指令信號(hào),響應(yīng)速度快、穩(wěn)態(tài)誤差小,可見該復(fù)合控制律具有較強(qiáng)的魯棒特性; 對(duì)比分析圖4~5,圖7~8可以看出,直接力的作用能夠影響舵機(jī)的動(dòng)態(tài)特性,當(dāng)脈沖發(fā)動(dòng)機(jī)頻繁開機(jī)時(shí),舵偏角在一定范圍內(nèi)隨之變化; 由圖9~10可以看出,該點(diǎn)火算法消耗的脈沖發(fā)動(dòng)機(jī)較多,這與算法的精確性和復(fù)雜性是統(tǒng)一的。
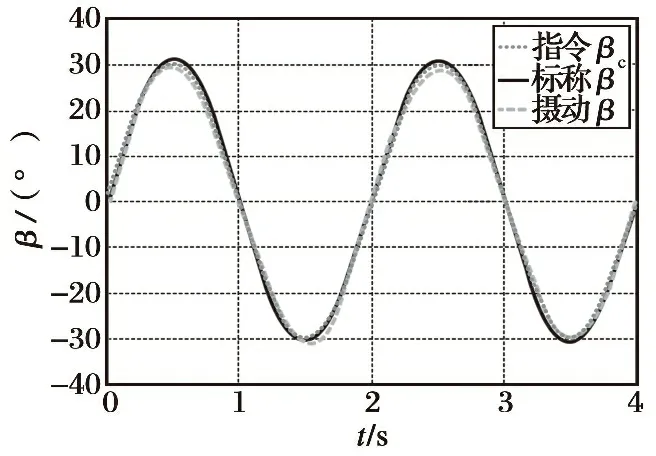
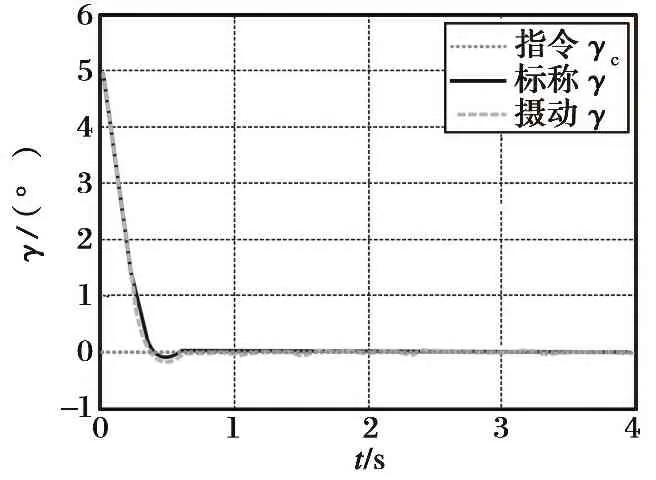
圖2 側(cè)滑角響應(yīng)曲線
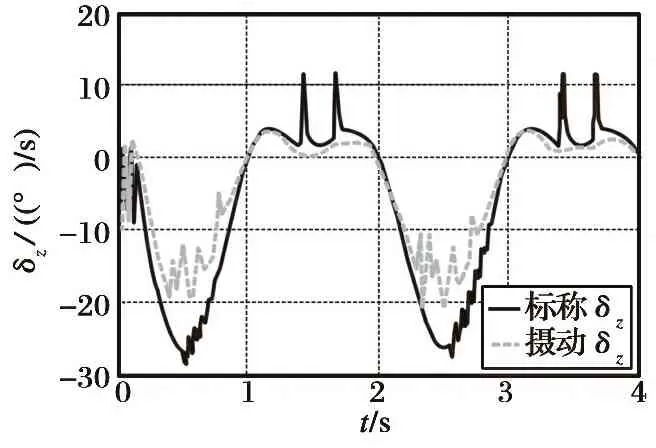
圖3 滾轉(zhuǎn)角響應(yīng)曲線
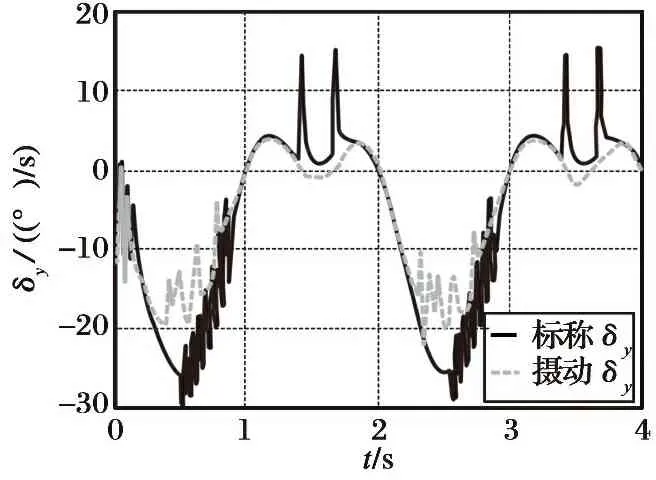
圖4 俯仰舵偏角響應(yīng)曲線
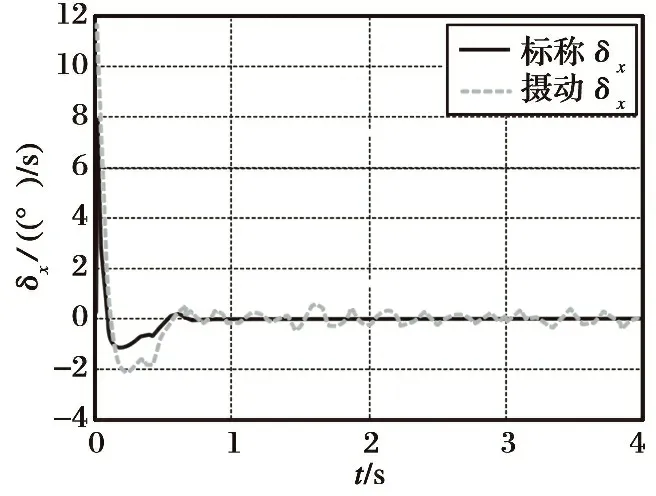
圖5 偏航舵偏角響應(yīng)曲線
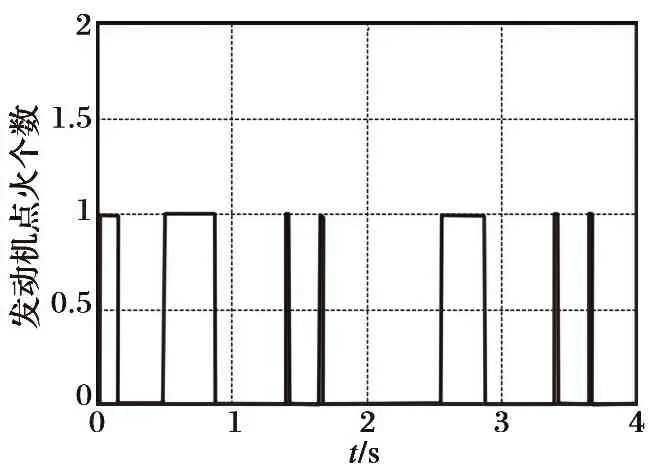
圖6 滾轉(zhuǎn)舵偏角響應(yīng)曲線
圖7 標(biāo)稱條件下發(fā)動(dòng)機(jī)開機(jī)個(gè)數(shù)
圖8 攝動(dòng)條件下發(fā)動(dòng)機(jī)開機(jī)個(gè)數(shù)
圖9 標(biāo)稱條件下的直接力
圖10攝動(dòng)條件下的直接力
4結(jié)論
本文為解決姿控式直接力/氣動(dòng)力復(fù)合控制問題中兩種控制方式之間的干擾問題,設(shè)計(jì)了一種基于魯棒軌跡跟蹤的直/氣復(fù)合魯棒控制方法。這種控制方法將姿態(tài)控制系統(tǒng)分為快、慢兩個(gè)回路,以動(dòng)態(tài)逆控制為主體,通過在慢回路中引入魯棒軌跡跟蹤控制的方法,抑制姿態(tài)控制系統(tǒng)中存在的各種不確定性以及兩者之間的干擾,在保證系統(tǒng)響應(yīng)性能的同時(shí)提高系統(tǒng)的魯棒性。該方法的設(shè)計(jì)為直接力/氣動(dòng)力復(fù)合控制設(shè)計(jì)提供了一種新的思路。
參考文獻(xiàn):
[1] 黃琳, 段志生, 楊劍影. 近空間高超聲速飛行器對(duì)控制科學(xué)的挑戰(zhàn)[J]. 控制理論與應(yīng)用, 2011, 28(10): 1496-1505.
[2] 梁棟,宋建梅,蔡高華. 高速飛行器直接力/氣動(dòng)力復(fù)合控制技術(shù)綜述[J]. 航空兵器,2013(8): 15-20.
[3] 張?zhí)煊? 董長(zhǎng)虹. 基于自適應(yīng)反演法的導(dǎo)彈直/氣復(fù)合制導(dǎo)[J]. 北京航空航天大學(xué)學(xué)報(bào), 2013, 39(7): 902-906.
[4]ShtesselYB,ShkolnikovIA,LevantA.GuidanceandControlofMissileInterceptorUsingSecond-OrderSlidingModes[J].IEEETransactionsonAerospaceandElectronicSystems, 2009, 45(1): 110-124.
[5] 李鑫, 祝志云, 楊軍. 氣動(dòng)力/直接力復(fù)合控制系統(tǒng)零極點(diǎn)配置設(shè)計(jì)[J]. 計(jì)算機(jī)仿真, 2009, 26(12): 34-37.
[6] 李錦, 張銳. 高速自旋導(dǎo)彈直接力控制穩(wěn)定性研究[J]. 現(xiàn)代防御技術(shù),2014,42(5): 70-75.
[7] 張波, 祝小平, 周洲, 等. 基于縱向直接力控制的飛翼布局無人機(jī)紊流減緩[J]. 西北工業(yè)大學(xué)學(xué)報(bào), 2013, 32(5): 675-681.
[8] 王青,江一帆,董朝陽(yáng),等. 基于動(dòng)態(tài)逆的復(fù)合控制導(dǎo)彈H∞最優(yōu)輸出跟蹤控制[J]. 兵工學(xué)報(bào), 2014,35(4): 552-558.
[9] 郭超,梁曉庚,王俊偉. 基于非線性干擾觀測(cè)器的攔截彈動(dòng)態(tài)逆控制[J]. 系統(tǒng)工程與電子技術(shù), 2014, 36(11): 2259-2266.
[10] 賀風(fēng)華, 馬克茂, 姚郁. 基于輸出預(yù)測(cè)的姿控發(fā)動(dòng)機(jī)控制律優(yōu)化設(shè)計(jì)[J].航空學(xué)報(bào), 2009, 30(6): 1131-1137.
[11]MenonPK,IragavarapuVR.AdaptiveTechniquesforMultipleActuatorBlending[C]∥GuidanceNavigationandControlConferenceandExhibit,Boston, 1998.
Blended Robust Control Method with Lateral Thrust and Aerodynamic Force Based on Robust Trail Tracking
Shao Lei1,Zhang Jinpeng2,Cao Youliang2
(1.Aerial Defence and Antimissile Insitute, The Air Force Engineering University, Xi’an 710051,China;2.China Airborne Missile Academy, Luoyang 471009, China)
Abstract:Based on the combination of robust trail tracking control and dynamic inverse control, a blended robust control method is investigated to deal with the blended attitude control with lateral thrust and aerodynamic force. Through organic fusion of the two kinds of control methods, virtural control design is done, which brings in the robust trail tracking control based on the dynamic inverse control for the slower loop, to suppress the disturb between the lateral thrust and aerodynamic force, and to improve the robust of system. Simulation result shows that the effectiveness and the robust of the proposed control method.
Key words:blended control; dynamic inverse control; trail tracking control; robust
DOI:10.19297/j.cnki.41-1228/tj.2016.01.006
收稿日期:2015-05-17
基金項(xiàng)目:航空科學(xué)基金項(xiàng)目(20140196004)
作者簡(jiǎn)介:邵雷(1982-),男,湖北天門人,博士,講師,研究方向?yàn)榉蔷€性控制、飛行器制導(dǎo)與控制。
中圖分類號(hào):TJ765.2
文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1673-5048(2016)01-0035-05