四軸飛行器的增量式PID控制
2016-06-29 01:15:59周國鵬
湖北科技學院學報 2016年3期
周 智,周國鵬,吳 菲
(湖北科技學院,湖北 咸寧 437100)
四軸飛行器的增量式PID控制
周智,周國鵬,吳菲
(湖北科技學院,湖北咸寧437100)
摘要:主要講述四軸飛行器原理以及控制系統(tǒng)設(shè)計,提出了增量式PID算法,著重介紹PID的概念和實現(xiàn)調(diào)試的方式。
關(guān)鍵詞:四軸飛行器;飛行控制;增量式PID;算法
四軸飛行器是一種具有對稱結(jié)構(gòu)、利用四個旋翼作為飛行引擎來進行空中飛行的多旋翼直升機[1]。四軸飛行器有直升機的垂直升降的飛行性能,同時也大大降低了飛行器機械結(jié)構(gòu)的設(shè)計難度,具有體積小、質(zhì)量輕、結(jié)構(gòu)簡單、升力大且機動靈活等優(yōu)勢,在無人機領(lǐng)域得到了廣泛的應(yīng)用[2]。
在實際應(yīng)用方面,四軸飛行器可以進入人不能進入的比較危險、惡劣的環(huán)境,比如在軍事方面進行敵情偵查及監(jiān)視,在民用方面,進行航拍、取景、測繪地圖等飛行任務(wù)[3]。
隨著技術(shù)的飛速進步,控制理論不斷成熟,現(xiàn)在很多學者開始對四軸飛行器進行各種分析,對其建立數(shù)學模型,并由此提出了很多種控制算法,對四軸飛行器進行有效的控制,使其能夠自主飛行控制。比如PID算法、模糊算法、模糊PID算法,但一般是采用PID控制算法對四軸飛行器進行控制,因其算法簡單、魯棒性好及可靠性高,更重要的是實現(xiàn)起來較容易,對硬件要求也比較低[4,5]。本文就四軸飛行器的PID控制算法進行討論。
一、四軸飛行器控制系統(tǒng)設(shè)計
四軸飛行器有四個輸入量,但有六個輸出量,四個輸入量是對 4 個無刷電機轉(zhuǎn)速的改變,六個輸出量是施加在飛行器上的 6 個自由度的力矩,通過改變這六個輸出量來調(diào)節(jié)飛行姿態(tài)。四軸飛行器的4 個無刷電機是安裝在機架的 4 個頂點,每個無刷電機安裝配套螺旋槳,螺旋槳分為 2 組,相鄰螺旋槳是反向的,無刷電機的轉(zhuǎn)向也是相反的,這樣在轉(zhuǎn)速相同時,螺旋槳之間的扭力就可以抵消,只剩下向上的升力,在轉(zhuǎn)速不同時,因為螺旋槳之間的扭力無法抵消,就會使四軸飛行器旋轉(zhuǎn),從而改變其航向角;相對的螺旋槳是同向并且轉(zhuǎn)向也相同,當其速度相同時,可以讓飛行器上升下降,速度不同時,可以使四軸飛行器前后左右旋轉(zhuǎn),改變俯仰角和橫滾角[5,6]。
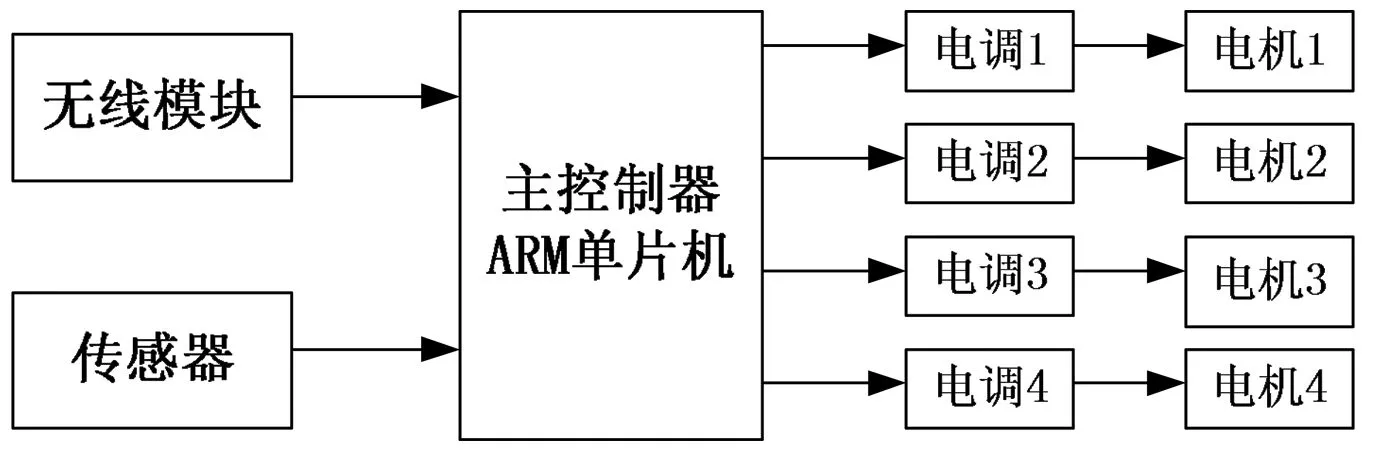
圖1 四軸飛行器控制系統(tǒng)結(jié)構(gòu)框圖

圖2 四軸飛行器實物飛行圖
控制系統(tǒng)主要是由無線和傳感器模塊、主控制器、輸出部分組成。四軸飛行器的結(jié)構(gòu)框圖如圖1所示,遙控器通過無線模塊給設(shè)定值,傳感器模塊采集角速度、加速度等信息傳輸給主控制器,主控制器通過對接受的各種信息進行相應(yīng)的控制算法處理,計算出四個電機應(yīng)當輸出的轉(zhuǎn)速,再通過輸出四個PWM波形信號給四個電調(diào)來控制無刷電機輸出相應(yīng)的轉(zhuǎn)速,進而改變四軸飛行器的飛行姿態(tài)。
二、PID控制算法
PID控制器是一種線性控制系統(tǒng),通過對輸入值和輸出值的偏差進行比例 、 積分 、 微分控制,以實現(xiàn)對被控對象的控制,其控制系統(tǒng)主要由PID控制器和被控對象組成[5]。
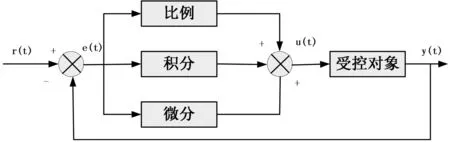
圖3 PID控制原理圖
PID控制分為模擬PID算法和數(shù)字PID算法:
模擬PID控制算式為:u(t)=Kp[e(t)+


三、增量式PID的仿真與測試
在實際中一般是采用增量式PID算法,因其實現(xiàn)起來更簡單、方便。在四軸飛行器控制系統(tǒng)中,PID 控制器是根據(jù)無線模塊輸入的設(shè)定值與當前傳感器的輸出值的偏差,再通過獲取飛行器過去和現(xiàn)在的狀態(tài),對其未來狀態(tài)進行預(yù)測,來對電機轉(zhuǎn)速進行適當?shù)目刂疲詫崿F(xiàn)對四軸飛行器的良好控制 。
PID控制中的比例作用可以加快系統(tǒng)的響應(yīng)速度,從而減小系統(tǒng)的穩(wěn)態(tài)誤差,有利于提高控制精度。然而Kp取得過大,系統(tǒng)的開環(huán)增益也會加大,可能導(dǎo)致系統(tǒng)穩(wěn)定性降低甚至會產(chǎn)生震蕩。而積分作用可以減少穩(wěn)態(tài)誤差,但積分控制會使系統(tǒng)的動態(tài)性能降低,過大會使系統(tǒng)超調(diào)量變大,甚至使系統(tǒng)不穩(wěn)定。微分作用可以提高系統(tǒng)的響應(yīng)速度,但系統(tǒng)的抗干擾能力會減弱 ,對擾動很敏感,很小的干擾都能引起系統(tǒng)的響應(yīng) 。
根據(jù)四軸飛行器力學模型的推導(dǎo),Matlab Simulink 仿真圖如圖4:
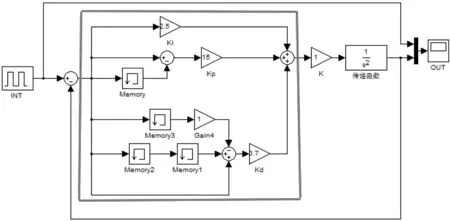
圖4 增量式 PID 控制 Matlab Simulink 仿真
圖4中紅色框圖內(nèi)為增量式PID控制器,根據(jù)輸入輸出的偏差e輸出相應(yīng)的轉(zhuǎn)速,增益K是用來模擬飛行器系統(tǒng)的結(jié)構(gòu)和外界干擾變化。用試湊法進行了測試,為使系統(tǒng)的超調(diào)量不超過輸入信號的20%,上升時間不低于1s,PID控制器的參數(shù)取值為:11≤Kp≤17,1.5≤Ki≤3.5,0.5≤Kd≤1,1≤K≤3。選定PID參數(shù)Kp=15,Ki=3,Kd=1,因要模擬飛行器結(jié)構(gòu)和外界干擾,所以增益K可以在1-3內(nèi)改動,當飛行結(jié)構(gòu)改變的時候K變化大,當只有外界干擾的時候,K改變很小。仿真系統(tǒng)結(jié)果如下:
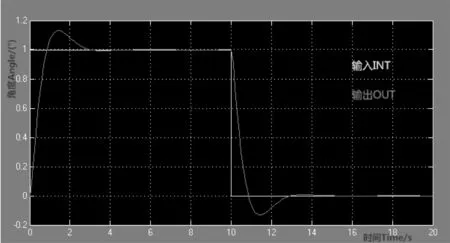
圖5(a) Kp=15,Ki=3,Kd=1,K=1時的曲線
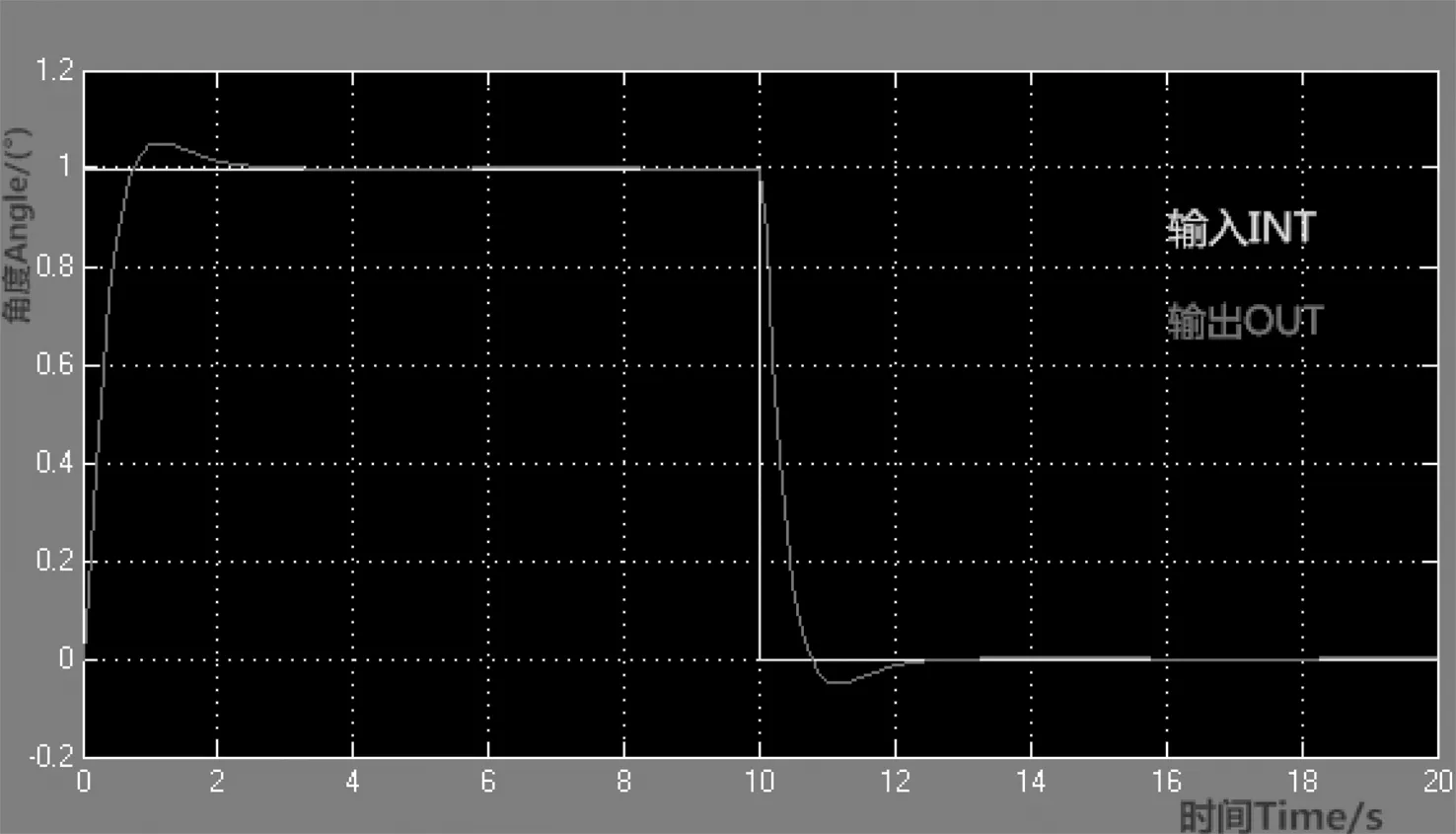
圖5(b) Kp=15,Ki=3,Kd=1,K=1.5時的曲線
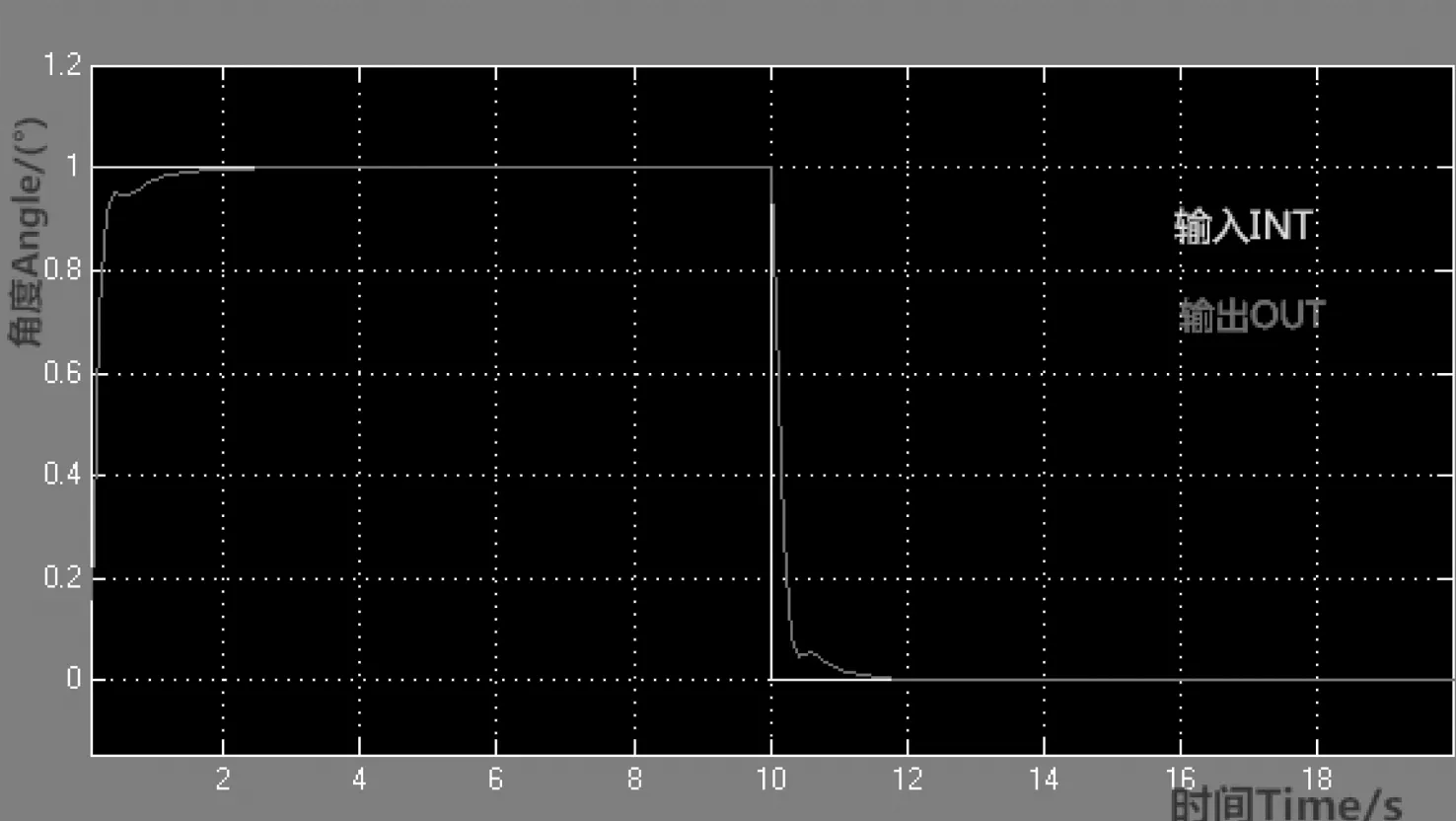
圖5(c) Kp=15,Ki=3,Kd=1,K=3時的曲線
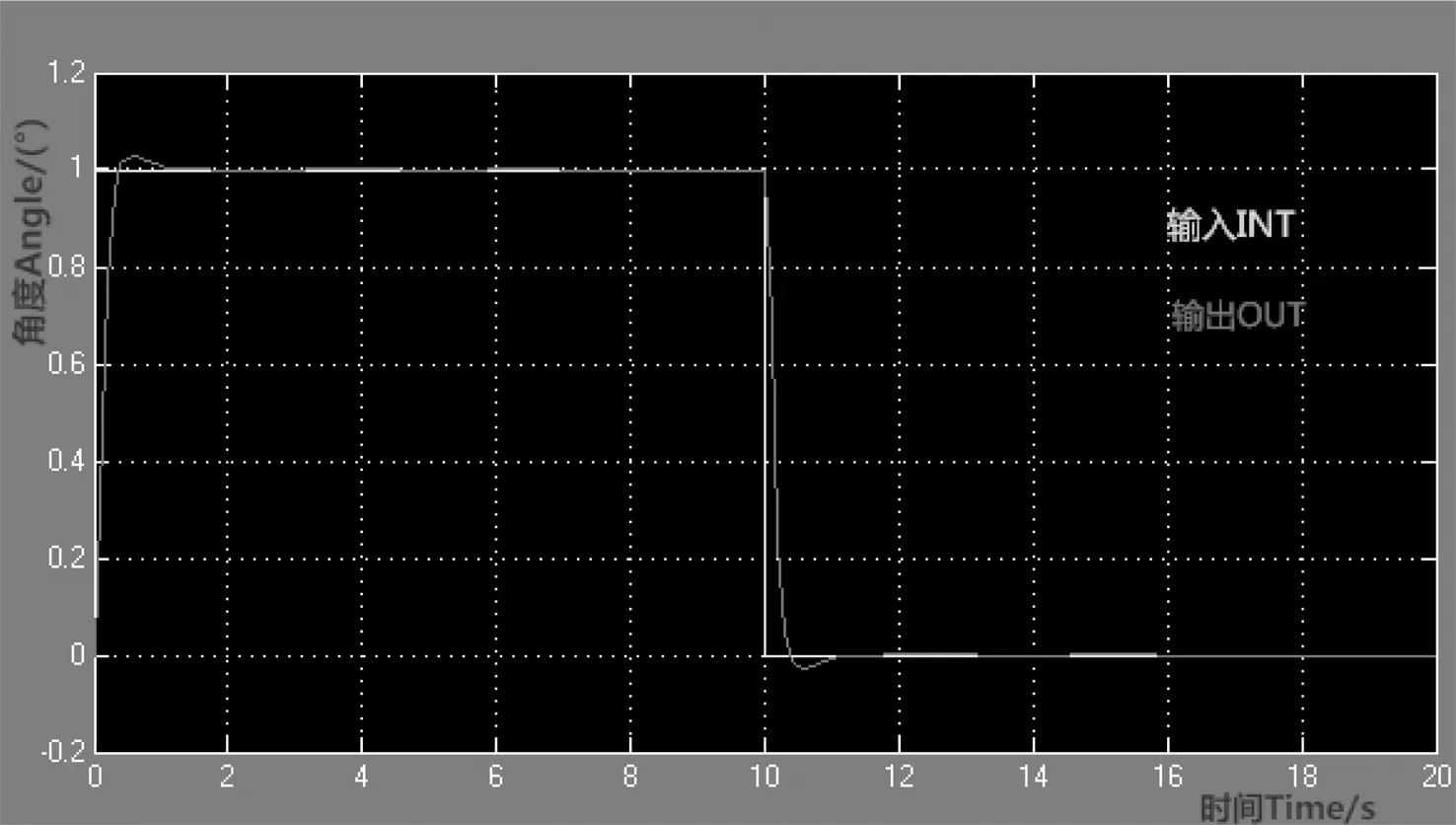
圖5(d) Kp=15,Ki=3,Kd=3,K=3時的曲線

圖6 飛行效果圖
由圖可知,圖5(a)中超調(diào)量為17.5%,上升時間為0.75s;圖5(b)中超調(diào)量為5.1%,上升時間為0.75s;圖5(c)中超調(diào)量為0,上升時間為1.7s;
圖5(d)中超調(diào)量為2.7%,上升時間為0.38s。通過對比圖5(a)和圖5(b)可知,在K=1.5,變化很小的時候,系統(tǒng)響應(yīng)曲線變化很小,也就是說在飛行器結(jié)構(gòu)不變的時候,增量式PID可以比較穩(wěn)定的控制飛行器的穩(wěn)定飛行;通過對比圖5(a)和圖5(c)可知,在K=3,變化很大的時候,表示飛行器結(jié)構(gòu)變化了,可以看到系統(tǒng)的響應(yīng)曲線變化很大;而在圖5(d)當PID參數(shù)重新調(diào)整的時候,也可以得到很好的控制效果 。
調(diào)試結(jié)果表明,在飛行器結(jié)構(gòu)不變的時候,完全可以用PID算法來控制飛行器的穩(wěn)定飛行。通過試湊法反復(fù)試驗,調(diào)整PID參數(shù),得到滿意的參數(shù),達到良好的控制效果。
四、結(jié)語
本文通過對四軸飛行器的原理的分析,構(gòu)建了數(shù)學模型,并用Simulink搭建增量式PID控制的仿真模型,用試湊法測試出比較合適的PID參數(shù),得到良好的控制效果。在對于飛行器結(jié)構(gòu)差異很小的情況下,增量式PID控制器對飛行器的控制效果非常好,有良好的飛行效果。可以看出,其控制原理是非常簡潔的,就是將過去和現(xiàn)在的狀態(tài),通過一系列運算來預(yù)測未來的狀態(tài),有很好的前瞻性,并且對控制單元的運算速率要求很低,適用性很廣,具有非常好的前景。
參考文獻:
[1]劉峰, 呂強, 王國勝,等. 四軸飛行器姿態(tài)控制系統(tǒng)設(shè)計[J]. 計算機測量與控制, 2011, 19(3):583~585.
[2]樊冬雪, 成怡, 金海林,等. 四軸飛行器視覺導(dǎo)航系統(tǒng)設(shè)計[J]. 電子技術(shù)應(yīng)用, 2014, 40(8):140~142.
[3]陳海生, 鐘江濤, 林俊凱. 基于四軸飛行器的PID姿態(tài)控制系統(tǒng)[J]. 消費電子, 2014,(22).
[4]丁堅. 模糊PID控制器的研究[D]. 哈爾濱:哈爾濱工程大學, 2009.
[5]劉浩蓬, 龍長江, 萬鵬,等. 植保四軸飛行器的模糊PID控制[J]. 農(nóng)業(yè)工程學報, 2015, (1):71~77.
[6]陶春. 微型四軸飛行器結(jié)構(gòu)形式的研究[J]. 都市家教月刊, 2015,(9).
文章編號:2095-4654(2016)03-0005-03
* 收稿日期:2015-11-22
中圖分類號:TB114.2
文獻標識碼:A
