基于模糊積分的三自由度直升機模型的飛行姿態控制
2016-07-21 06:48:44李紅星陳曉倩許曉暉康武彪
北京聯合大學學報 2016年2期
關鍵詞:仿真
趙 俊,李紅星,陳曉倩,許曉暉,康武彪
(北京聯合大學自動化學院,北京 100101)
?
基于模糊積分的三自由度直升機模型的飛行姿態控制
趙 俊,李紅星,陳曉倩,許曉暉,康武彪
(北京聯合大學自動化學院,北京 100101)
[摘 要]針對三自由度直升機系統的不穩定性、非線性、強耦合等特點,設計了模糊積分控制算法,進行了直升機模型的飛行姿態控制研究。基于MATLAB的仿真平臺,進行模糊積分控制的直升機系統仿真研究,分析了系統的魯棒性和抗干擾性,并與傳統的PID控制算法進行比較,仿真結果表明,模糊積分控制算法能夠有效地控制三自由度直升機模型的飛行姿態,并且具有良好的動態品質,較好的魯棒性和抗干擾能力。
[關鍵詞]三自由度直升機;模糊積分控制;仿真;魯棒性
引言
對直升機模型系統的控制方法研究是航空航天控制、機器人控制、各類伺服云臺控制等的一個縮影,能起到觸類旁通的作用,因其較好的物理特性,研究出來的控制算法也能移植到其他被控對象中,因此,直升機模型系統的控制算法研究具有重要的工程意義。目前對直升機模型的多數研究只局限于仿真平臺,仍未擺脫實驗對象的理想化模式。多數都是針對單軸的控制,線性化后的模型較少考慮到系統內部之間的耦合問題。針對三自由度直升機模型具有多變量、非線性的特點,以及俯仰軸與橫側軸、旋轉軸與橫側軸之間具有強耦合的特點,本文設計了模糊積分控制算法,使三自由度直升機在同一位置做起飛和停止的動作,能平穩精確地控制飛行姿態[1-5]。
1 三自由度直升機系統模型的建立
1.1三自由度實驗室直升機模型結構
三自由度直升機系統(簡稱直升機)由基座、平衡桿、平衡塊和螺旋槳等部分組成。其實際結構如圖1所示。平衡桿以基座為支點,進行俯仰和轉動的飛行動作。螺旋槳和平衡塊分別安裝在平衡桿的兩端。螺旋槳旋轉產生的升力可以使平衡桿以基座為支點做俯仰運動,利用兩個螺旋槳的速度差可以使平衡桿以基座為軸做偏航運動。平衡桿的俯仰、滾動、偏航方向分別安裝了3個光電碼盤傳感器,用以測量平衡桿俯仰、滾動、偏航角度數據,其中光電碼盤傳感器的數據轉換關系如表1所示。兩個螺旋槳分別由兩個直流無刷電機驅動,為直升機提供動力。通過調節安裝在平衡桿另一測的平衡塊可以改變螺旋槳電機的出力大小。安裝在基座的集電環保證了系統本體和電控箱之間的信號傳送,不受直升機轉動的影響[6-8]。

表1 光電碼盤數據轉換關系Table 1 The data conversion relationship of Photoelectrical Encoder
三自由度直升飛機是二輸入三輸出系統,二輸入為兩個螺旋槳電機的電壓,三輸出為俯仰角、橫側角和旋轉角。
1.2三自由度直升機系統建模
三自由度直升機模型簡化結構圖如圖2所示。假設直升機懸在空中,并且俯仰角為零。俯仰軸的轉矩是由兩個螺旋槳電機產生的升力F1和F2;若直升機在轉動過程中俯仰角不為零,則轉矩是由兩個電機升力在豎直方向的分力,當直升機本體重力小于升力大小時,直升機開始做上升運動;反之直升機做下降的運動。橫側軸由兩個螺旋槳產生的升力控制,若F1>F2,則螺旋槳將產生傾斜,實現直升機旋轉[2]。
建立三軸動力學方程如下:
俯仰軸模型:
橫側軸模型:
旋轉軸模型:
其中:Vs和Vd為控制量,Vs=V1+V2,Vd=V1-V2,V1和V2是兩個電機的電壓,由它們產生升力F1和F2;Kc代表螺旋槳的電機升力常數;L1是支點到電機的距離;L2是支點到平衡塊的距離;Tg是由俯仰軸的重力G產生的有效重力矩,Tg=mhgL1-mbgL2,mh和mb分別是直升機螺旋槳部分和平衡塊的質量;Je為俯仰軸的轉動慣量,為俯仰軸的俯仰加速度,ε為俯仰軸的俯仰角;Lp代表橫側軸到電機的距離;Jp為橫側軸的轉動慣量,為橫側軸的轉動加速度,p為橫側軸的轉動角,若橫側角為零,則sin(p)為零,沒有力傳遞給旋轉軸;Jt為旋轉軸的轉動慣量,為旋轉軸的旋轉角加速度,r為旋轉軸的旋轉角(rad/s),即偏航角;G為螺旋槳的懸浮力。其電氣參數如表2所示。

表2 電氣參數Table 2 Electrical parameters
由于旋轉軸的動力來自螺旋槳橫側軸傾斜時產生的水平方向升力,它的輸出作為橫側軸的輸入,因而只要對橫側軸和俯仰軸進行控制,就能達到姿態優化的目的。
同時,國有企業的大多數金融系統都采用先進的財務軟件來管理和控制日常業務。由于缺乏專業知識,他們只能簡單地處理日常財務程序,并沒有真正了解財務軟件信息自動化的管理和控制功能,缺乏有能力的財務會計[3]。
1.3模型機解耦器設計
兩個電機中一個電機的電壓是由橫側軸和俯仰軸控制器共同作用決定的,而改變控制器輸出必然對另一電機的電壓有影響,所以被控對象系統可以看作是一個雙輸入雙輸出的耦合系統[2]。由于Tg是常數,與V1和V2無關,設計解耦器時忽略Tg,由式(1)和式(2)可得到橫側軸和俯仰軸運動方程的傳遞函數為
寫成狀態方程為
設解耦器的傳遞函數陣為D(s),采用對角線矩陣綜合法求解耦器陣,即
得解耦器陣為
2 控制器設計
2.1模糊控制算法設計
由于三自由度直升機具有強耦合、非線性等特點,采用傳統的控制方法很難得到滿意的控制效果。模糊控制是基于規則的控制方式,不依賴于被控對象的精確模型。對于那些難以獲取系統的數學模型或不易掌握動態特性的被控對象,模糊控制是非常適用和有效的[9-10]。
本文采用二維模糊控制器,以系統的偏差E和偏差變化率EC為輸入語言變量,以U作為輸出語言變量。針對三自由度直升機模型的特性,選取系統誤差E的基本論域為(-6,+6),對應的模糊論域為{-6,-4,-2,0,+2,+4,+6},取7個模糊子集,語言變量取為{負大,負中,負小,零,正小,正中,正大},用NB、NM、NS、ZO、PS、PM、PB表示。誤差變化率EC的基本論域、模糊論域、模糊變量的選取與誤差E的相同。隸屬函數為高斯型函數和三角形函數的復合型,即(-6,-4)和(+4,+ 6)采用高斯型函數作為模糊集合的隸屬函數,(-4,+4)采用三角形作為模糊集合的隸屬函數,其偏差E的隸屬函數如圖3所示,誤差變化率EC的隸屬函數相同。
輸出語言變量U的基本論域為(-6,+6),其對應的模糊論域和語言變量與誤差E相同,采用三角形隸屬度函數,如圖4所示。
根據系統的動態行為,建立模糊控制規則如表3所示。
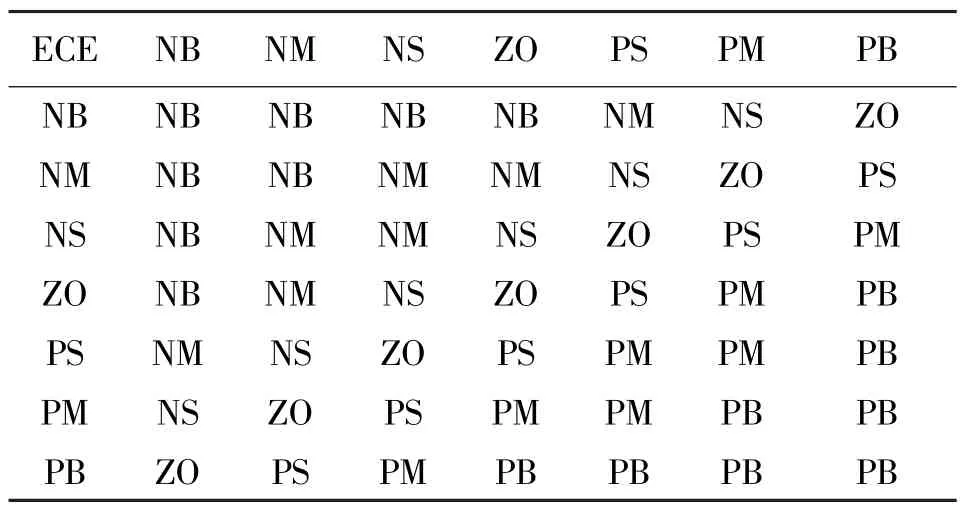
表3 模糊控制規則(U)Table 3 Fuzzy control rules(U)
本文采用Mamdani推理,解模糊化規則選擇bisector法。
2.2模糊積分控制器設計
模糊控制器具有動態性能好,不依賴于被控對象的精確數學模型,但模糊控制的穩態性能較差,無法消除穩態誤差,不適合于控制精度要求高的系統。因此,本文設計了模糊積分控制,既有模糊控制的良好動態性能,又有積分控制的良好穩態性能,能夠達到快速和準確的控制效果。模糊積分控制器的結構圖如圖5所示。
通過解耦直升機模型的俯仰軸和橫側軸的控制仿真結構圖如圖6所示。
3 仿真實驗
3.1單軸模型的仿真結果
三自由度直升機系統的俯仰軸與橫側軸的耦合被解耦后為二個單變量系統。考慮 Tg= 3.713 7,給定俯仰角度為10°時,系統的PID控制與模糊控制的響應曲線如圖7所示。由圖7可見,模糊積分控制具有良好的控制品質,調節時間為0.98 s,基本沒有超調,穩態誤差為零;PID控制超調相對較大,調節時間在1.2 s左右。相比之下,模糊積分控制要優于PID控制。給定橫側角度為10°時,系統的PID控制與模糊控制的響應曲線如圖8所示。可見,模糊積分控制的調節時間為2 s,基本沒有超調,穩態誤差為零;PID控制的超調量為5%,調節時間在2.5 s,模糊積分控制同樣優于PID控制。
3.2三軸模型的仿真結果
三自由度直升機系統控制仿真結構如圖6所示,給定俯仰角度和橫側角度為10°,旋轉速度為20°/s時,模糊積分控制和PID控制的俯仰軸響應曲線如圖7所示,橫側軸響應曲線如圖9所示,旋轉軸的響應曲線如圖10所示。可見,本文設計的模糊積分控制具有良好的控制品質。
在15 s時,分別給3個軸施加一個單位階躍信號作為擾動信號,3個軸的模糊積分控制響應曲線如圖11所示。可見,本文設計的算法具有良好的抗擾性。
當系統模型傳遞函數的參數分別增大15%和減小15%時,俯仰軸、橫側軸和旋轉軸的模糊積分控制響應曲線分別如圖12、圖13和圖14所示。從圖中可見,當對參數增大或減小,系統都可以很好的趨于穩定,時間也相差不多,且沒有出現超調、發散等問題,這表明我們設計的控制系統具有很好的魯棒性。
4 結束語
由于三自由度直升機系統具有不穩定性、非線性、強耦合等特點,傳統的控制算法很難得到滿意的控制效果,本文設計了模糊積分控制算法,針對橫側軸和俯仰軸之間的強耦合關系,設計了解耦陣,實現了橫側軸和俯仰軸的解耦,可以對兩個單變量系統設計控制器,進行了直升機模型的飛行姿態控制研究。通過仿真研究了三自由度直升機模型的抗擾動能力和魯棒性分析,并將本文設計的控制算法與傳統PID控制進行了控制效果對比分析,仿真結果表明,本文設計的模糊積分控制算法具有滿意的控制效果,抗干擾能力和魯棒性強。
[參考文獻]
[1] 呂俊剛,汪家道,陳大融.微型無人直升機旋翼操縱機構設計及分析[J].清華大學學報,2002,42(11):1484-1487.
[2] 張樂,吳金男,畢少杰.基于模糊PID的直升機模型飛行姿態控制[J].控制工程,2013,21(3):387-390.
[3] 岳新成,楊瑩,耿志勇.三自由度直升機模型的無靜差跟蹤控制[J].系統仿真學報,2007,19(18):4279-4283.
[4] 范才智,宋寶泉.平臺上的無人直升機非線性預測姿態控制[J].控制工程,2009,17(1):9-13.
[5] KAZUO Tanaka,HIROSHI Ohtake,WANG HUOO.A practical design approach to stabilization of a 3-DOF RC helicopter[J]. IEEE Transactions On Control Systems Technology,2004,12(8):2985-2988.
[6] 趙云園.基于三自由度直升機模型的控制方法研究[D].成都:西華大學,2012:2-4.
[7] 王修巖,趙昌麗,李宗帥.三自由度直升機模型跟蹤控制[J].計算機仿真,2010,27(6):98-102.
[8] 固高科技.三自由度直升機系統用戶手冊[Z].深圳:固高科技有限公司,2005.
[9] Kong Xiang-Ling,Li Hong-Xing,Dong Fang.Adaptive Fuzzy plus Integral Control for Double Variable Electric Furnace[J]. Research Journal of Applied Sciences,Engineering and Technology,2013,6(15):2784-2788.
[10] Wu Huai-ning,Wang Jun-wei,Li Han-xiong.Design of distributed H∞fuzzy controllers with constraint for nonlinear hyperbolic PDE systems[J].Automatica,2012,48(10):2535-2543.
(責任編輯 李亞青)
The Fuzzy Integration Control Based on Three-DOF Helicopter Model
ZHAO Jun,LI Hong-xing,CHEN Xiao-qian,XU Xiao-hui,KANG Wu-biao
(Automation College of Beijing Union University,Beijing 100101,China)
Abstract:In view of the instability,nonlinearity and tight coupling of three degrees of freedom helicopter system,a study on flight attitude control system of helicopter model has been done,with the use of fuzzy integration controller algorithm.Based on MATLAB simulation platform,a fuzzy integration control algorithm is studied for helicopter system,analyzed the robustness and anti-interference ability of the system,while comparing it with the traditional PID control algorithm.The result shows that the fuzzy integration control algorithm can effectively control the flight attitude of three degrees of freedom helicopter model,and has favorable dynamic quality,robustness and anti-interference ability.
Key words:Three-DOF helicopter;Fuzzy integration control;Simulation;Robustness
[中圖分類號]V 275
[文獻標志碼]A
[文章編號]1005-0310(2016)02-0040-06
DOI:10.16255/j.cnki.ldxbz.2016.02.007
[收稿日期]2015-12-24
[基金項目]北京市“啟明星”大學生科技創新項目(201511417SJ041)。
[作者簡介]趙俊(1994-),女,陜西省寶雞市人,北京聯合大學自動化學院學生,研究方向為智能控制和控制網絡。
[通訊作者]李紅星(1956-),男,山西省忻州市人,北京聯合大學自動化學院教授,研究方向為網絡化智能控制。E-mail:zdhthongxing@buu.edu.cn
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49