基于空泡壓力的水下航行體深度測(cè)量系統(tǒng)設(shè)計(jì)
2016-07-22 10:50:26解春雷祝樹生詹景坤王小輝仇公望中國(guó)運(yùn)載火箭技術(shù)研究院研發(fā)中心北京100076
電子測(cè)試 2016年11期
解春雷,祝樹生,詹景坤,王小輝,仇公望(中國(guó)運(yùn)載火箭技術(shù)研究院研發(fā)中心,北京,100076)
?
基于空泡壓力的水下航行體深度測(cè)量系統(tǒng)設(shè)計(jì)
解春雷,祝樹生,詹景坤,王小輝,仇公望
(中國(guó)運(yùn)載火箭技術(shù)研究院研發(fā)中心,北京,100076)
摘要:實(shí)時(shí)獲取準(zhǔn)確的深度信息對(duì)水下航行體的機(jī)動(dòng)控制至關(guān)重要,傳統(tǒng)的捷聯(lián)式導(dǎo)航解算得到的深度信息受慣性器件的累計(jì)誤差影響較大。本文開展了基于空泡壓力的水下航行體深度測(cè)量方法技術(shù)研究,建立了一套基于“空泡內(nèi)靜壓+動(dòng)壓+空化數(shù)”的深度測(cè)量方法,并完成了一套樣機(jī)測(cè)量系統(tǒng)的設(shè)計(jì),最后通過(guò)水池模擬試驗(yàn)來(lái)進(jìn)行驗(yàn)證,為帶空泡高速航行體走向應(yīng)用提供了新的思路。
關(guān)鍵詞:水下航行體;空泡;深度測(cè)量;測(cè)量系統(tǒng)
0 引言
空泡是一種物理現(xiàn)象,是液體中空化現(xiàn)象的一種表現(xiàn)形式。根據(jù)流體動(dòng)力學(xué)的伯努利定律中“流速越快,流體產(chǎn)生的壓力越小”這個(gè)概念,即當(dāng)航行體在水下以超過(guò)100節(jié)的高速運(yùn)動(dòng)時(shí),液體壓力等于水蒸氣壓力時(shí),其周圍因水壓力的變化而使水相變?yōu)闅庀啵瑥亩a(chǎn)生覆蓋了部分航行體或全部表面的超空泡。在空泡包裹下行駛的航行器因?yàn)闆]有直接接觸水,降低了產(chǎn)生的勃性阻力的可能性,使得其在水中的阻力減少一個(gè)數(shù)量級(jí),是水下航行體減阻的革命性方法。
從現(xiàn)階段對(duì)空泡技術(shù)的認(rèn)識(shí)分析,影響空泡技術(shù)走向未來(lái)應(yīng)用的關(guān)鍵在于突破帶空泡航行體機(jī)動(dòng)控制等關(guān)鍵技術(shù)。深度的控制對(duì)水下航行體的機(jī)動(dòng)控制至關(guān)重要,是保證空泡流型穩(wěn)定和水沖壓發(fā)動(dòng)機(jī)正常工作的關(guān)鍵因素。而實(shí)現(xiàn)深度控制的前提是獲取準(zhǔn)確的深度信息,水下航行體的深度信息可以通過(guò)捷聯(lián)慣組對(duì)線加速度的測(cè)量后經(jīng)導(dǎo)航解算來(lái)獲得。但是由于空間的局限,水下航行體多采用體積小、精度低的MEMS器件,在長(zhǎng)航時(shí)或遠(yuǎn)距離投送狀態(tài)下,經(jīng)計(jì)算機(jī)計(jì)算出的深度信息受慣性器件的累計(jì)誤差影響較大。
因此帶空泡水下航行體需要采用一種準(zhǔn)確的深度測(cè)量方法,基于壓力的深度測(cè)量方法就成為了實(shí)現(xiàn)深度控制的另一種可嘗試的技術(shù)途徑。本文采用工程計(jì)算方法,建立了一套基于“空泡內(nèi)靜壓+動(dòng)壓+空化數(shù)”的深度測(cè)量方法,完成了一套樣機(jī)測(cè)量系統(tǒng)的設(shè)計(jì),最后通過(guò)水池模擬試驗(yàn)來(lái)進(jìn)行驗(yàn)證。
1 基于空泡壓力的深度測(cè)量原理
水下航行體高速運(yùn)動(dòng)時(shí)產(chǎn)生軸對(duì)稱的空泡,空泡尾部以回射流的形式閉合在航行體上,空泡示意圖見圖1。空泡尾部封閉區(qū)域的流體保持層流狀態(tài),因此稱之為層流封閉空泡模型,當(dāng)繞空泡面運(yùn)動(dòng)的流體繞過(guò)空泡尾部沖擊物體表面時(shí),在物體表面上就會(huì)產(chǎn)生超壓。由于物體以變速形式向水面高速運(yùn)動(dòng),空泡位置在物體表面上是變化的。
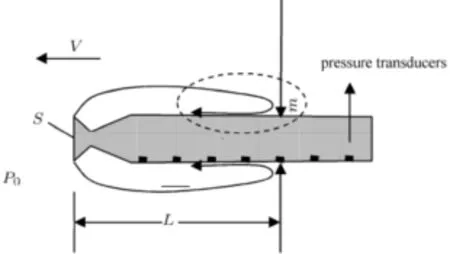
圖1 水下航行體空泡示意圖
對(duì)于低速水下航行體而言,深度控制依賴以水壓測(cè)定原理的深度傳感器直接提供的深度數(shù)據(jù)。而帶空泡水下航行體的特別之處在于航行體被空泡包裹,深度信息不能直接由傳感器來(lái)獲得,只能采用間接測(cè)量的方法。
則可以得到環(huán)境壓力與水下航行體的動(dòng)壓之間的關(guān)系如下:


結(jié)合上述二式,可以得到:

此外,由于水下航行體的巡航速度有設(shè)計(jì)的額定值,因此,在水下航行體推阻平衡的狀態(tài)下,可以通過(guò)空化器前端進(jìn)水孔內(nèi)總壓的波動(dòng)估計(jì)環(huán)境壓力的變化,進(jìn)而對(duì)航行深度的變化有所掌握,這也是在水下航行體研究性試驗(yàn)中,對(duì)慣組解算出的深度信息進(jìn)行有效性評(píng)估的一種非常有效而實(shí)用的方法。
2 系統(tǒng)方案設(shè)計(jì)
2.1方案概述
由于水下航行環(huán)境的特殊性,電磁波信號(hào)在水介質(zhì)中會(huì)快速的衰減,傳輸距離較短,無(wú)法有效的將測(cè)試數(shù)據(jù)傳輸?shù)降孛嬖O(shè)備。而帶空泡航行體在水下航行過(guò)程中,其表面包裹著空泡,從而在航行體與水介質(zhì)間形成了空氣截面,聲納信號(hào)也無(wú)法較好的傳輸出去,同樣無(wú)法有效的將測(cè)試數(shù)據(jù)傳輸?shù)降孛嬖O(shè)備。因此無(wú)線電遙測(cè)體制、聲納測(cè)量體制均無(wú)法適用帶空泡航行體的遙測(cè)信息傳輸。
本文采用“回收式測(cè)量系統(tǒng)”作為帶空泡航行體的測(cè)量方案。回收式測(cè)量系統(tǒng)采用固態(tài)存儲(chǔ)器作為測(cè)量數(shù)據(jù)的記錄方式。通過(guò)在航行體各個(gè)艙段布置傳感器及變換器進(jìn)行壓力、速度等參數(shù)的測(cè)量,通過(guò)固態(tài)存儲(chǔ)器存儲(chǔ)大量的測(cè)量數(shù)據(jù),在試驗(yàn)結(jié)束后,通過(guò)打撈回收航行體及固態(tài)存儲(chǔ)設(shè)備,讀取回收試驗(yàn)測(cè)量數(shù)據(jù)。
測(cè)量系統(tǒng)基本組成框圖如圖2所示。
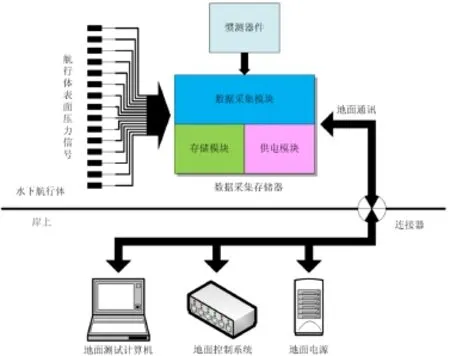
圖2 測(cè)量系統(tǒng)組成框圖
從圖中可以看出,測(cè)量系統(tǒng)主要包含壓力傳感器、慣性測(cè)量器件、數(shù)據(jù)采集存儲(chǔ)器(包含數(shù)據(jù)采集模塊、存儲(chǔ)模塊、供電模塊)、地面測(cè)試計(jì)算機(jī)、地面控制系統(tǒng)、地面電源等。
2.2壓力傳感器
水下航行體的內(nèi)部空間較小,且在高速航行中航行體表面覆蓋空泡,空泡內(nèi)的壓力隨著航行中空泡的產(chǎn)生和潰滅進(jìn)行高速的變化,航行體表面測(cè)量介質(zhì)也在水、氣及水氣混合物間不斷變換。
因此對(duì)壓力傳感器的要求主要如下:
1)結(jié)構(gòu)尺寸要微小;
2)能適應(yīng)水、氣及水氣混合物等多相流界面;
3)壓力傳感器的動(dòng)態(tài)范圍要求不小于1kHz。
本方案采用硅壓阻式壓力傳感器完成空泡內(nèi)壓力的測(cè)量。壓力傳感器采用敏感元件背面承壓的工作模式,由硅片作為測(cè)量元件直接接觸被測(cè)介質(zhì),當(dāng)硅片受壓力形變時(shí)集成在硅片內(nèi)部的惠斯頓電橋產(chǎn)生相應(yīng)的不平衡輸出,輸出的信號(hào)經(jīng)信號(hào)處理電路轉(zhuǎn)換成要求的電壓信號(hào)。
圖3所示為背底承壓結(jié)構(gòu)示意圖。
圖4為由惠斯頓電橋組成的壓阻式傳感器,如無(wú)壓力變化,其輸出為零。
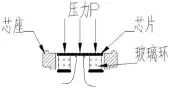
圖3 背底承壓結(jié)構(gòu)示意圖
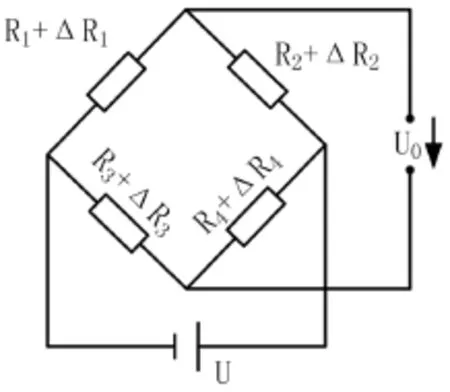
圖4 惠斯頓電橋電路原理
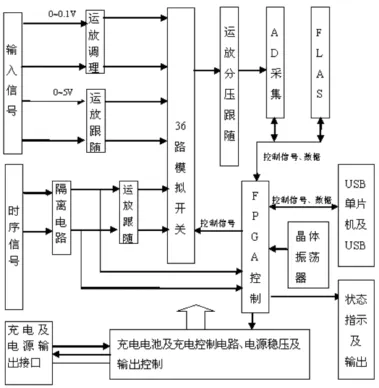
圖5 數(shù)據(jù)采集存儲(chǔ)器原理示意圖
壓力傳感器的主要技術(shù)指標(biāo)要求如表1所示。

表1 壓力傳感器性能指標(biāo)
2.3數(shù)據(jù)采集存儲(chǔ)器
數(shù)據(jù)采集存儲(chǔ)器為測(cè)量系統(tǒng)信息采集和處理的核心,主要包含數(shù)據(jù)采集模塊、存儲(chǔ)模塊、供電模塊等部分,原理示意圖如圖5所示。
數(shù)據(jù)采集系統(tǒng)的輸入端對(duì)表面壓力信號(hào)進(jìn)行放大調(diào)理到05V,對(duì)時(shí)序電路進(jìn)行隔離跟隨處理。把輸入信號(hào)送往的模擬開關(guān),運(yùn)放分壓跟隨送到ADC,在FPGA的控制下進(jìn)行采集。將輸入信號(hào)按采樣要求有序的輸入給同一個(gè)AD進(jìn)行采集,并設(shè)置一定的幀格式存儲(chǔ)在同一片2G字節(jié)容量的Flash中,各路數(shù)據(jù)以幀格式為參考由應(yīng)用軟件分別提取、繪圖。記錄器采用充電電池供電,模擬開關(guān)切換時(shí)間最快為30ns,AD采集最大為40M-MSPS。
1)數(shù)據(jù)采集模塊
數(shù)據(jù)采集模塊的功能是對(duì)航行體各壓力傳感器輸出進(jìn)行信號(hào)調(diào)理及放大,對(duì)放大后的信號(hào)進(jìn)行采集和編碼,并完成與地面測(cè)試計(jì)算機(jī)的通信。
壓力傳感器輸出0~100mV的弱電壓信號(hào),經(jīng)壓力變換器調(diào)理成0~5V的電壓信號(hào),送至數(shù)據(jù)采集模塊進(jìn)行數(shù)據(jù)采集。
2)存儲(chǔ)模塊
回收式測(cè)量系統(tǒng)將所有測(cè)量數(shù)據(jù)存儲(chǔ)于裝在航行器上的固態(tài)存儲(chǔ)器上,試驗(yàn)結(jié)束后通過(guò)打撈回收進(jìn)行數(shù)據(jù)獲取。固態(tài)存儲(chǔ)器采用掉電不丟失的FLASH存儲(chǔ)芯片,存儲(chǔ)容量為2G,存儲(chǔ)器設(shè)置為16個(gè)分區(qū)。存儲(chǔ)器每次啟動(dòng)后,只對(duì)空的存儲(chǔ)區(qū)間進(jìn)行數(shù)據(jù)存儲(chǔ)操作,以避免有效數(shù)據(jù)被覆蓋。
3)供電模塊
電池采用鋰離子電池對(duì)測(cè)量系統(tǒng)的設(shè)備進(jìn)行供電,鋰離子電池具有可重復(fù)性充放電、操作簡(jiǎn)單等優(yōu)點(diǎn)。供電模塊提供MEMS慣性測(cè)量器件的+5V電壓供電,提供壓力傳感器的1.5mA恒流源供電。
3 模擬試驗(yàn)及結(jié)果分析
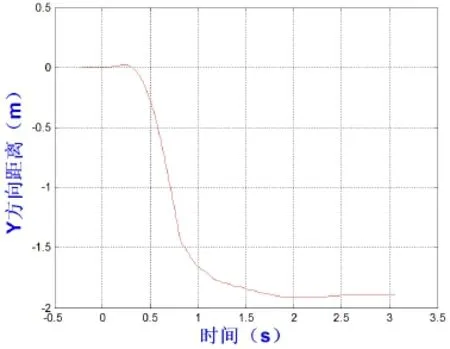
圖6 慣性器件測(cè)試的航行體深度數(shù)據(jù)
為了驗(yàn)證基于空泡壓力的水下航行體深度測(cè)量方法的有效性,本文開展了模擬測(cè)試試驗(yàn),獲取試驗(yàn)?zāi)P偷南嚓P(guān)運(yùn)動(dòng)參數(shù)、壓力參數(shù)等數(shù)據(jù)。
通過(guò)對(duì)慣性器件數(shù)據(jù)的零位漂移誤差、耦合誤差進(jìn)行補(bǔ)償,對(duì)高頻振動(dòng)噪聲進(jìn)行濾波,得到的深度方向的慣性器件測(cè)量結(jié)果,通過(guò)工程計(jì)算得到基于慣性測(cè)量器件測(cè)試的航行體深度數(shù)據(jù),如圖6所示。
通過(guò)對(duì)壓力數(shù)據(jù)的噪聲進(jìn)行濾波,得到航行中空泡內(nèi)壓力測(cè)量結(jié)果,如圖7所示。
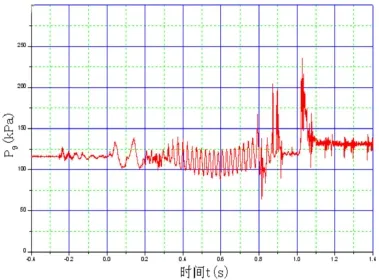
圖7 空泡內(nèi)壓力測(cè)量結(jié)果
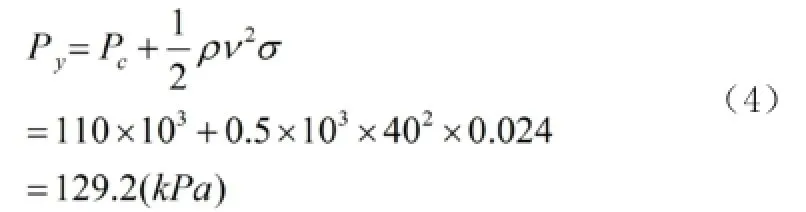
試驗(yàn)數(shù)據(jù)取0.6s~0.7s內(nèi)開展計(jì)算,此時(shí)航行體軸向速度約為40m/s、航行體空泡內(nèi)壓力均值為=110kPa。試驗(yàn)?zāi)P偷目栈瘮?shù)設(shè)計(jì)值為0.024,可以得到帶空泡航行體的環(huán)境總壓為:
此次模擬測(cè)試試驗(yàn)中測(cè)試時(shí)間約1s,因此MEMS慣性測(cè)量器件的零位漂移誤差較小,慣性測(cè)量精度可以保障。由圖6中MEMS慣性測(cè)量器件解算出的航行體深度信息可以看出,在0.6s~0.7s內(nèi),航行體深度方向下降了約1.3m,而航行體起始位置深度為1.7m,因此其解算的航行體深度約為3m。
可以看出,通過(guò)基于空泡內(nèi)壓力的工程計(jì)算所得航行體深度與MEMS慣組所測(cè)的航行體深度基本相同。
4 結(jié)束語(yǔ)
實(shí)時(shí)獲取準(zhǔn)確的深度信息對(duì)水下航行體的機(jī)動(dòng)控制至關(guān)重要,傳統(tǒng)的捷聯(lián)式導(dǎo)航解算得到的深度信息受慣性器件的累計(jì)誤差影響較大。本文從水下航行體的空泡內(nèi)靜壓與動(dòng)壓關(guān)系出發(fā),通過(guò)壓力建立了一套基于“空泡內(nèi)靜壓+動(dòng)壓+空化數(shù)”的深度測(cè)量方法,對(duì)航行體慣性器件解算出的深度信息進(jìn)行有效的補(bǔ)
充,研制了測(cè)量樣機(jī)系統(tǒng),通過(guò)水池模擬測(cè)試試驗(yàn)測(cè)量方法進(jìn)行了驗(yàn)證,為帶空泡高速航行體走向應(yīng)用提供了新的思路。
參考文獻(xiàn)
[1] 王獻(xiàn)孚.空化泡和超空化泡流動(dòng)理論及應(yīng)用.國(guó)防工業(yè)出版社. 2009.
[2] 張瑾.超空泡形態(tài)參數(shù)的測(cè)量及參數(shù)可視化研究. 碩士論文.西北工業(yè)大學(xué). 2012
[3] 曹偉,魏英杰,王聰,鄒振祝,黃文虎.超空泡技術(shù)現(xiàn)狀、問(wèn)題與應(yīng)用.力學(xué)進(jìn)展.2006, 36(4):571-579.
[4] M.Wosnic,T.Schauer,R.Arndt.Experimental Study of a Ventilated Supercavitating Vehicle.Fifth International Symposium on citation.Osaka,Japan.2003, Cav03-OS-7-008.
[5] 白濤, 畢曉君.水下超空泡航行體縱向機(jī)動(dòng)運(yùn)動(dòng)控制研究.哈爾濱工程大學(xué)學(xué)報(bào). 2011(4): 445-450.
[6] Michel J M.Introduction to cavitation and supercavitation. VKI Special Course on Supercavitating Flows. 2001:RTO-EN-010.
[7] 姜國(guó)興,劉煜禹.方興未艾的水下通信技術(shù).中國(guó)水運(yùn). 2007(6):105-106.
[8] 管振輝.嵌入式高速固態(tài)存儲(chǔ)器的設(shè)計(jì).艦船電子對(duì)抗. 2013(2):97-99.
[9] 于家福,王星來(lái),李兵,鄒其利,唐貴.水介質(zhì)動(dòng)態(tài)壓力傳感器設(shè)計(jì)與實(shí)現(xiàn). 遙測(cè)遙控. 2014(3):53-57.
Design of underwater vehicle depth measure system based on pressure of vacuole
Xie Chunlei,Zhu Shusheng,Zhan Jingkun,Wang Xiaohui,Qiu Gongwang
(R&D Center, China Academy of Launch Vehicle Technology,Beijing,100076)
Abstract:Real-time measuring accurate depth data is very important to mobile control of underwater vehicle,traditional strap-down navigation solution measuring depth data is influence by accumulated error of inertial equipment.This paper take research on underwater vehicle depth measure method based on pressure of vacuole,found an depth measure method based on“static pressure in vacuole + dynamic pressure + cavitation number”,and completed a set of prototype measure system, and pass the verification by cistern simulated test,provide new ideas for apllication of vehicle with vacuole.
Keywords:Underwater vehicle;Vacuole;Depth measure;Measure system
作者簡(jiǎn)介
解春雷(1984-),男,漢族,安徽人,碩士,哈爾濱工業(yè)大學(xué)畢業(yè),工程師,主要研究方向?yàn)椋猴w行器電氣系統(tǒng)總體設(shè)計(jì)。
