隨動裝置數(shù)字化設(shè)計(jì)關(guān)鍵技術(shù)及其應(yīng)用研究
2016-08-01 03:37:04方子帆楊守期馬增武杜義賢何孔德
關(guān)鍵詞:結(jié)構(gòu)優(yōu)化控制策略
方子帆 楊守期 曹 鋼 覃 濤 馬增武 杜義賢,2 何孔德
(1. 三峽大學(xué) 機(jī)械與動力學(xué)院, 湖北 宜昌 443002; 2. 三峽大學(xué) 新能源微電網(wǎng)湖北省協(xié)同創(chuàng)新中心, 湖北 宜昌 443002; 3. 三峽大學(xué) 水電機(jī)械設(shè)備設(shè)計(jì)與維護(hù)湖北省重點(diǎn)實(shí)驗(yàn)室, 湖北 宜昌 443002)
?
隨動裝置數(shù)字化設(shè)計(jì)關(guān)鍵技術(shù)及其應(yīng)用研究
方子帆1,2,3楊守期1曹鋼1覃濤1馬增武1杜義賢1,2何孔德1
(1. 三峽大學(xué) 機(jī)械與動力學(xué)院, 湖北 宜昌443002; 2. 三峽大學(xué) 新能源微電網(wǎng)湖北省協(xié)同創(chuàng)新中心, 湖北 宜昌443002; 3. 三峽大學(xué) 水電機(jī)械設(shè)備設(shè)計(jì)與維護(hù)湖北省重點(diǎn)實(shí)驗(yàn)室, 湖北 宜昌443002)
摘要:為解決隨動裝置傳統(tǒng)設(shè)計(jì)模式的成本高、周期長、質(zhì)量差的問題,采用數(shù)字化設(shè)計(jì)方法,對隨動裝置進(jìn)行方案設(shè)計(jì)、虛擬樣機(jī)與功能分析、控制策略、性能評價(jià)及優(yōu)化等關(guān)鍵技術(shù)及其應(yīng)用研究.根據(jù)需求分析,進(jìn)行隨動裝置方案設(shè)計(jì),應(yīng)用優(yōu)化算法對系統(tǒng)布局方案進(jìn)行了優(yōu)化計(jì)算,優(yōu)化后電動缸最大作用力減小28%,最小傳動角增加30%.建立隨動裝置虛擬樣機(jī)模型,以位置控制為目標(biāo)設(shè)計(jì)了控制系統(tǒng).通過虛擬樣機(jī)仿真與物理樣機(jī)伺服控制試驗(yàn),驗(yàn)證了虛擬樣機(jī)模型的正確性、控制策略的有效性以及功能的可實(shí)現(xiàn)性.對隨動裝置力學(xué)性能、零部件結(jié)構(gòu)強(qiáng)度、整機(jī)抗沖擊性能進(jìn)行了分析與評價(jià),以U型架為例進(jìn)行了結(jié)構(gòu)拓?fù)鋬?yōu)化,優(yōu)化后U型架重量減輕9.2%.研究結(jié)果表明:由系統(tǒng)方案優(yōu)化技術(shù)、虛擬樣機(jī)技術(shù)、現(xiàn)代控制技術(shù)、結(jié)構(gòu)拓?fù)鋬?yōu)化技術(shù)構(gòu)成的復(fù)雜機(jī)電系統(tǒng)數(shù)字化設(shè)計(jì)技術(shù),能夠?qū)崿F(xiàn)新產(chǎn)品設(shè)計(jì)過程的數(shù)字化,縮短產(chǎn)品開發(fā)周期,提高產(chǎn)品性能.
關(guān)鍵詞:隨動裝置;虛擬樣機(jī);性能評價(jià);控制策略;結(jié)構(gòu)優(yōu)化;數(shù)字化設(shè)計(jì)
新產(chǎn)品的研發(fā)按照傳統(tǒng)的設(shè)計(jì)模式通常要經(jīng)過設(shè)計(jì)、樣機(jī)試制、工業(yè)性試驗(yàn)、改進(jìn)定型和批量生產(chǎn)幾個(gè)步驟.由于這種基于物理樣機(jī)的設(shè)計(jì)研發(fā)模式的不足(成本高、周期長、質(zhì)量差),往往使物理樣機(jī)反復(fù)性試驗(yàn)不夠充分,加上設(shè)計(jì)人員通常不愿為修改局部而給整機(jī)帶來不可預(yù)知的結(jié)果,這就使機(jī)械產(chǎn)品造型、結(jié)構(gòu)和功能嚴(yán)重老化,從而在市場上缺乏競爭能力.這種基于樣機(jī)制造、試驗(yàn)的設(shè)計(jì)方法增加了新產(chǎn)品的研發(fā)周期和成本.產(chǎn)品結(jié)構(gòu)越復(fù)雜,研發(fā)周期和成本越高,從而嚴(yán)重制約了產(chǎn)品質(zhì)量的提高[1].在這種形勢下,在計(jì)算機(jī)上完成產(chǎn)品的開發(fā),通過對產(chǎn)品模型的分析,改進(jìn)產(chǎn)品設(shè)計(jì)方案,在數(shù)字狀態(tài)下進(jìn)行產(chǎn)品的虛擬試驗(yàn)和制造,再對設(shè)計(jì)進(jìn)行改進(jìn)或完善的數(shù)字化產(chǎn)品開發(fā)技術(shù)變得越來越重要[2].
M. Khorshidi[3]等對四連桿機(jī)構(gòu)的優(yōu)化設(shè)計(jì)目標(biāo)函數(shù)考慮了跟蹤誤差、傳動角偏差以及最大轉(zhuǎn)速比,采用遺傳算法求取了使目標(biāo)函數(shù)最小的一組設(shè)計(jì)變量.方子帆等[4]應(yīng)用復(fù)合形優(yōu)化算法對某型大俯仰機(jī)構(gòu)進(jìn)行了布局方案優(yōu)化研究,并利用虛擬樣機(jī)技術(shù)研究了產(chǎn)品性能評價(jià)的方法.赫赤等[5]對火炮液壓式隨動系統(tǒng)的性能參數(shù)測控系統(tǒng)進(jìn)行了設(shè)計(jì),并分析了表征液壓火炮隨動系統(tǒng)性能的各參數(shù)特性.2010年,李斌茂等[6]采用ADAMS與Matlab聯(lián)合仿真技術(shù)對AUV發(fā)動機(jī)進(jìn)行了運(yùn)動學(xué)動力學(xué)分析,并研究了圓柱凸輪與滾輪間間隙對運(yùn)動的影響.Dong-Chan Lee等[7]提出有必要將模型修正技術(shù)引入到現(xiàn)有的有限元軟件和優(yōu)化設(shè)計(jì)中,因?yàn)榫€性與非線性有限元分析預(yù)測的準(zhǔn)確性變得越來越重要,它直接影響到產(chǎn)品的競爭力.Hong-Seok Park等[8]則基于CAD-CAE集成與元建模技術(shù)做了一些結(jié)構(gòu)優(yōu)化的應(yīng)用實(shí)例.
從文獻(xiàn)分析看,對復(fù)雜機(jī)電系統(tǒng)的系統(tǒng)研究成果較少,大都集中于某一方面進(jìn)行研究.本文就隨動裝置方案設(shè)計(jì)、功能分析、性能評價(jià)及優(yōu)化等關(guān)鍵技術(shù)進(jìn)行系統(tǒng)研究,研究流程如圖1所示.
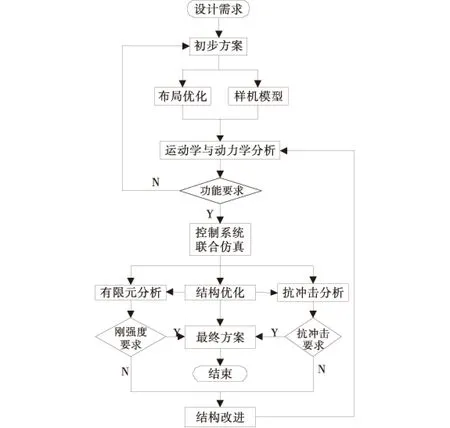
圖1 隨動裝置數(shù)字化設(shè)計(jì)方法流程圖
1隨動裝置方案設(shè)計(jì)
1.1需求分析
某型隨動裝置由隨動系統(tǒng)、傳動系統(tǒng)和支撐系統(tǒng)三大部分組成,要求在滿足產(chǎn)品功能和性能要求的前提下,完成結(jié)構(gòu)的輕量化,同時(shí)保證其良好的動態(tài)性能與控制性能,即保證運(yùn)轉(zhuǎn)的快速性與準(zhǔn)確性.
1.2方案實(shí)現(xiàn)
傳統(tǒng)設(shè)計(jì)方法是根據(jù)專家經(jīng)驗(yàn)完成方案初步設(shè)計(jì),然后試制實(shí)物樣機(jī)并進(jìn)行各種試驗(yàn)來改進(jìn)產(chǎn)品方案中布局不合理的地方,以滿足產(chǎn)品的功能和性能要求.傳統(tǒng)設(shè)計(jì)方法在產(chǎn)品樣機(jī)試驗(yàn)過程中難免受到嚴(yán)重破壞,需要重新試制新的實(shí)物樣機(jī)來進(jìn)行試驗(yàn),這樣大大增加了產(chǎn)品的設(shè)計(jì)周期和成本,而且難以保證產(chǎn)品質(zhì)量和長期使用性能.
以隨動裝置俯仰傳動系統(tǒng)為例,采用:初步方案設(shè)計(jì)→布局優(yōu)化的現(xiàn)代設(shè)計(jì)方法完成隨動裝置的方案設(shè)計(jì).
1.3方案優(yōu)化
1)設(shè)計(jì)變量
圖2為隨動裝置俯仰傳動系統(tǒng)簡圖,G為俯仰體重心,鉸點(diǎn)A、B布置在底座上,鉸點(diǎn)C布置在俯仰體上,AC為俯仰傳動油缸,α為BC與水平線初始夾角,A(x1,x2),B(x3,x4),C(x5,x6)為各鉸點(diǎn)初始坐標(biāo),C1(xC,yC)為俯仰角位移為θ度時(shí)C點(diǎn)的坐標(biāo),∠XBG即為俯仰體仰角.
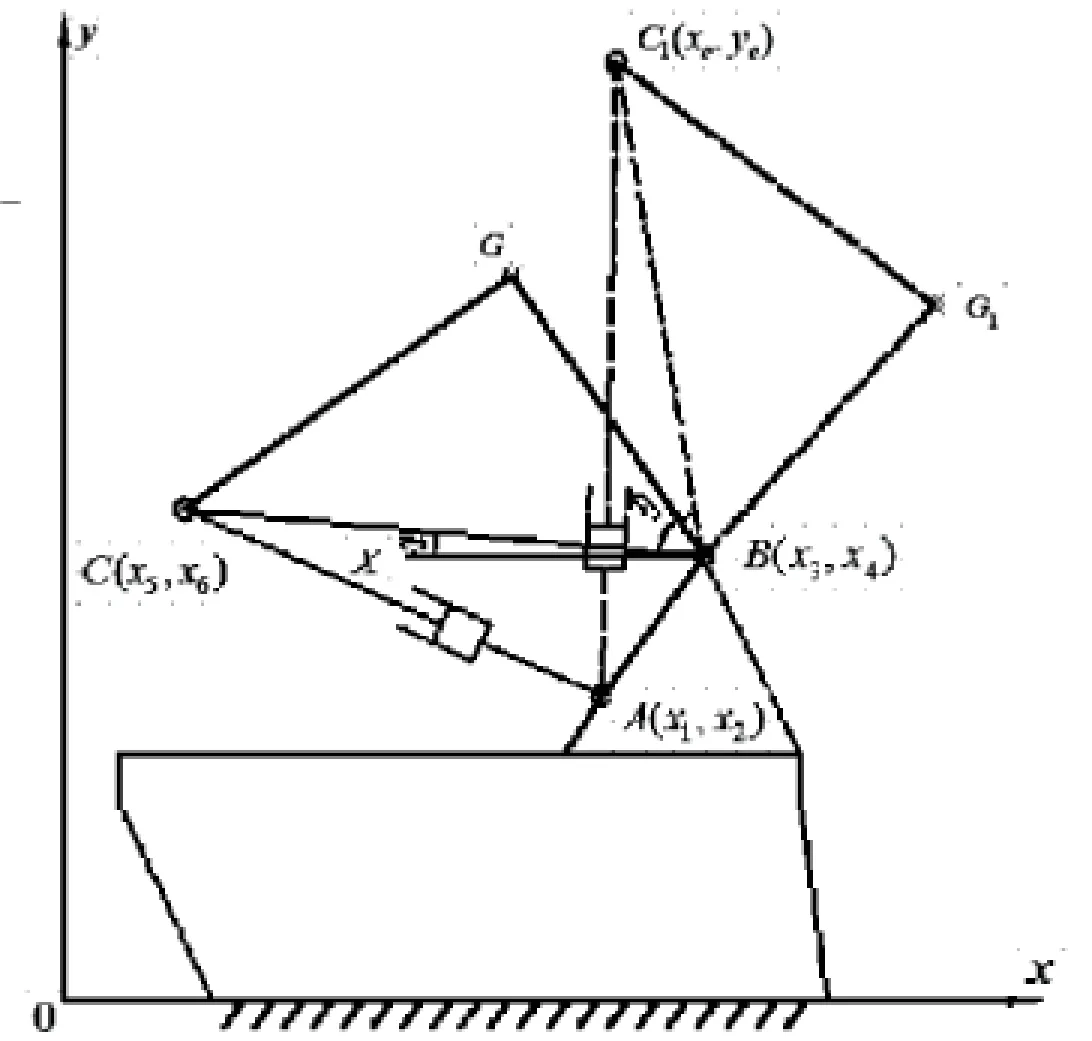
圖2 俯仰機(jī)構(gòu)簡圖
由圖2可知,該俯仰機(jī)構(gòu)有A(x1,x2),B(x3,x4),C(x5,x6)3個(gè)鉸點(diǎn),這些鉸點(diǎn)一旦確定,整個(gè)俯仰機(jī)構(gòu)的方案布局也隨之確定.因此,其設(shè)計(jì)變量為:
(1)
2)目標(biāo)函數(shù)
以提高整機(jī)工作效率和節(jié)約成本為總目標(biāo),取俯仰傳動油缸始末狀態(tài)中的最大作用力與近似功率的加權(quán)函數(shù)作為優(yōu)化目標(biāo).設(shè)俯仰傳動油缸初始推力為FCT,最終拉力為FCL,近似功率為P,最大作用力與近似功率的加權(quán)系數(shù)分別取為k1與k2,則目標(biāo)函數(shù)可以表示為
(2)
3)約束條件
鉸點(diǎn)及重心空間約束:各點(diǎn)坐標(biāo)應(yīng)滿足空間布置的可能性;俯仰傳動油缸初始長度、行程及穩(wěn)定性約束;傳動角約束:為保證俯仰機(jī)構(gòu)傳動性能,應(yīng)使其傳動角大于10°.俯仰運(yùn)動防死點(diǎn)約束:當(dāng)A、B、C共直線時(shí),會出現(xiàn)死點(diǎn)位置.俯仰傳動油缸推力與拉力約束:將俯仰傳動油缸初始推力與最終拉力的較大者限制在一定范圍內(nèi).
該俯仰傳動系統(tǒng)布局優(yōu)化設(shè)計(jì)屬于有約束非線性的優(yōu)化問題,選擇復(fù)合形法優(yōu)化方法,基于上述建立的優(yōu)化設(shè)計(jì)數(shù)學(xué)模型可以寫出復(fù)合形法的數(shù)學(xué)模型為:求受約束于gj(X)≥0的目標(biāo)函數(shù)minF(X),優(yōu)化前后主要設(shè)計(jì)性能指標(biāo)見表1,優(yōu)化后電動缸最大作用力減小28%,最小傳動角增加30%,電動缸初始長度增加3.7%,電動缸行程增加18%,電動缸平均功率減小15%.
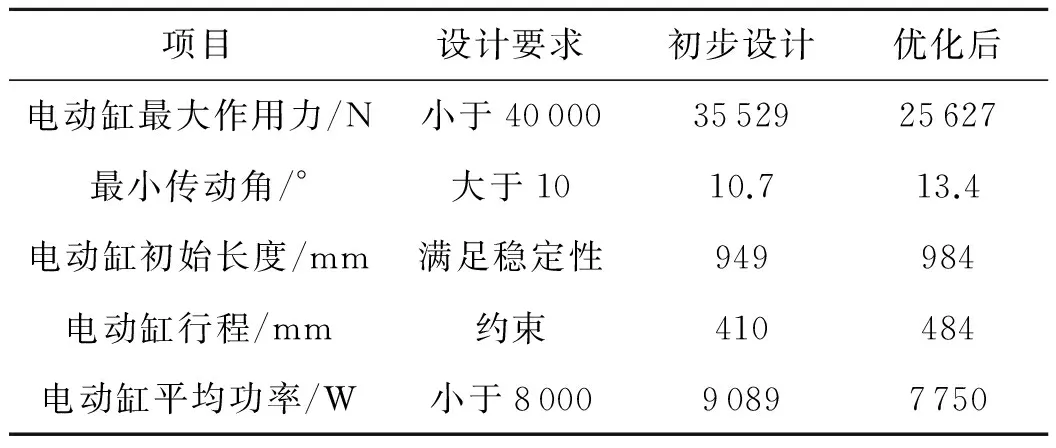
表1 優(yōu)化前后主要設(shè)計(jì)性能指標(biāo)
2虛擬樣機(jī)與功能分析
2.1虛擬樣機(jī)建模
隨動裝置樣機(jī)建模包括三維模型建模和虛擬樣機(jī)建模兩部分,運(yùn)用Pro/ENGINEER建立某型隨動裝置數(shù)字化三維模型,然后將其導(dǎo)入ADAMS多體動力學(xué)分析軟件中,施加構(gòu)件間的約束、驅(qū)動等關(guān)系,可建立隨動裝置的功能虛擬樣機(jī)模型.
2.2運(yùn)動學(xué)仿真
對隨動裝置俯仰運(yùn)動進(jìn)行運(yùn)動學(xué)仿真,設(shè)置仿真時(shí)間為19 s,定義仿真步長為3 800步,按ADAMS默認(rèn)求解器進(jìn)行求解,提取俯仰運(yùn)動運(yùn)動學(xué)仿真結(jié)果如圖3所示.
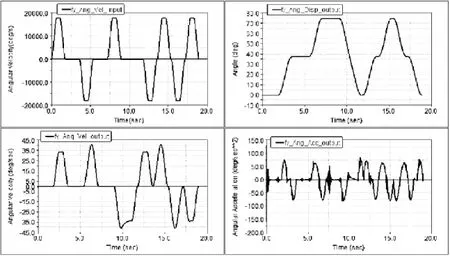
圖3 俯仰運(yùn)動特性輸入輸出仿真結(jié)果曲線
由以上運(yùn)動學(xué)仿真曲線可知:俯仰運(yùn)動滿足角位移范圍0~75°的功能要求,角速度變化范圍約為-41~41°/s,角加速度變化范圍約為-75~75°/s2.
2.3控制系統(tǒng)聯(lián)合仿真
隨動裝置俯仰傳動系統(tǒng)位置控制所研究的被控制量是俯仰體的空間角位移.當(dāng)俯仰位置給定(輸入量)變化時(shí),控制系統(tǒng)的任務(wù)是使系統(tǒng)輸出快速而準(zhǔn)確地復(fù)現(xiàn)輸入,即要求俯仰體能夠及時(shí)地復(fù)現(xiàn)俯仰位置輸入的變化.
采用基于經(jīng)典控制理論的三閉環(huán)PID控制系統(tǒng)進(jìn)行俯仰體的角位移三環(huán)控制系統(tǒng)設(shè)計(jì).其中,電流環(huán)和速度環(huán)的給定來自速度反饋和位置反饋,位置環(huán)的給定來自電機(jī)的轉(zhuǎn)速輸出,隨動裝置俯仰傳動三環(huán)控制系統(tǒng)如圖4所示.

圖4 俯仰傳動機(jī)電系統(tǒng)組成圖
鑒于經(jīng)典PID控制系統(tǒng)存在超調(diào)和時(shí)滯現(xiàn)象(這在實(shí)際工程裝備控制系統(tǒng)中是不允許的),建立了三維模糊PID自適應(yīng)控制器和加前饋環(huán)節(jié)的復(fù)合控制器,控制原理如圖5、圖6所示.
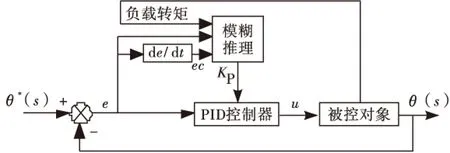
圖5 三維模糊PID自適應(yīng)控制器原理圖
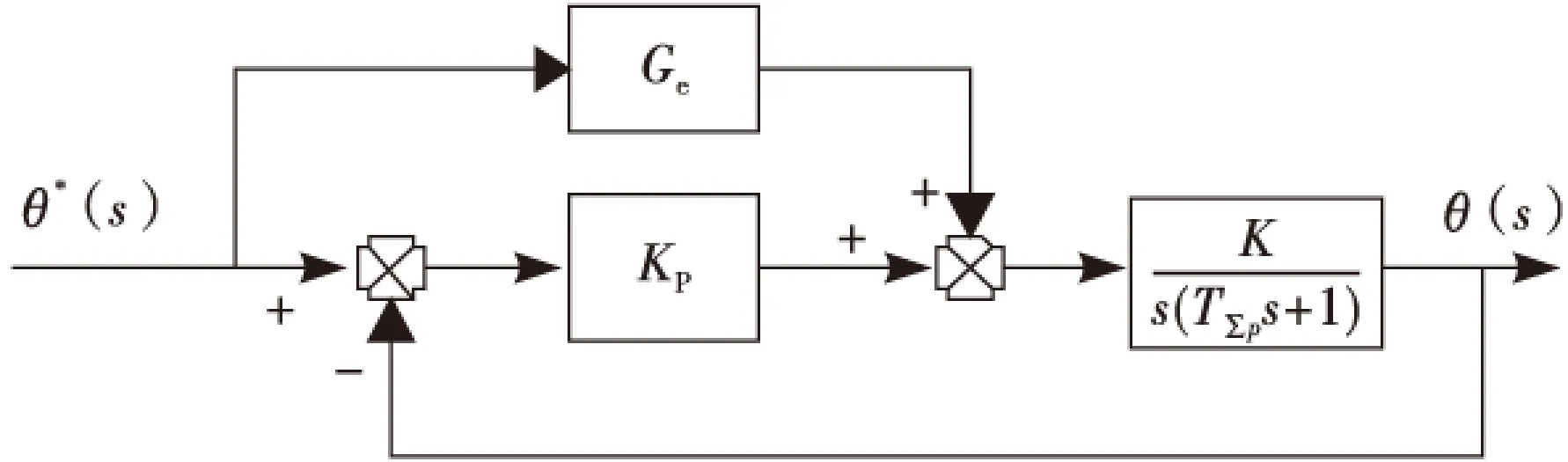
圖6 復(fù)合控制器原理框圖
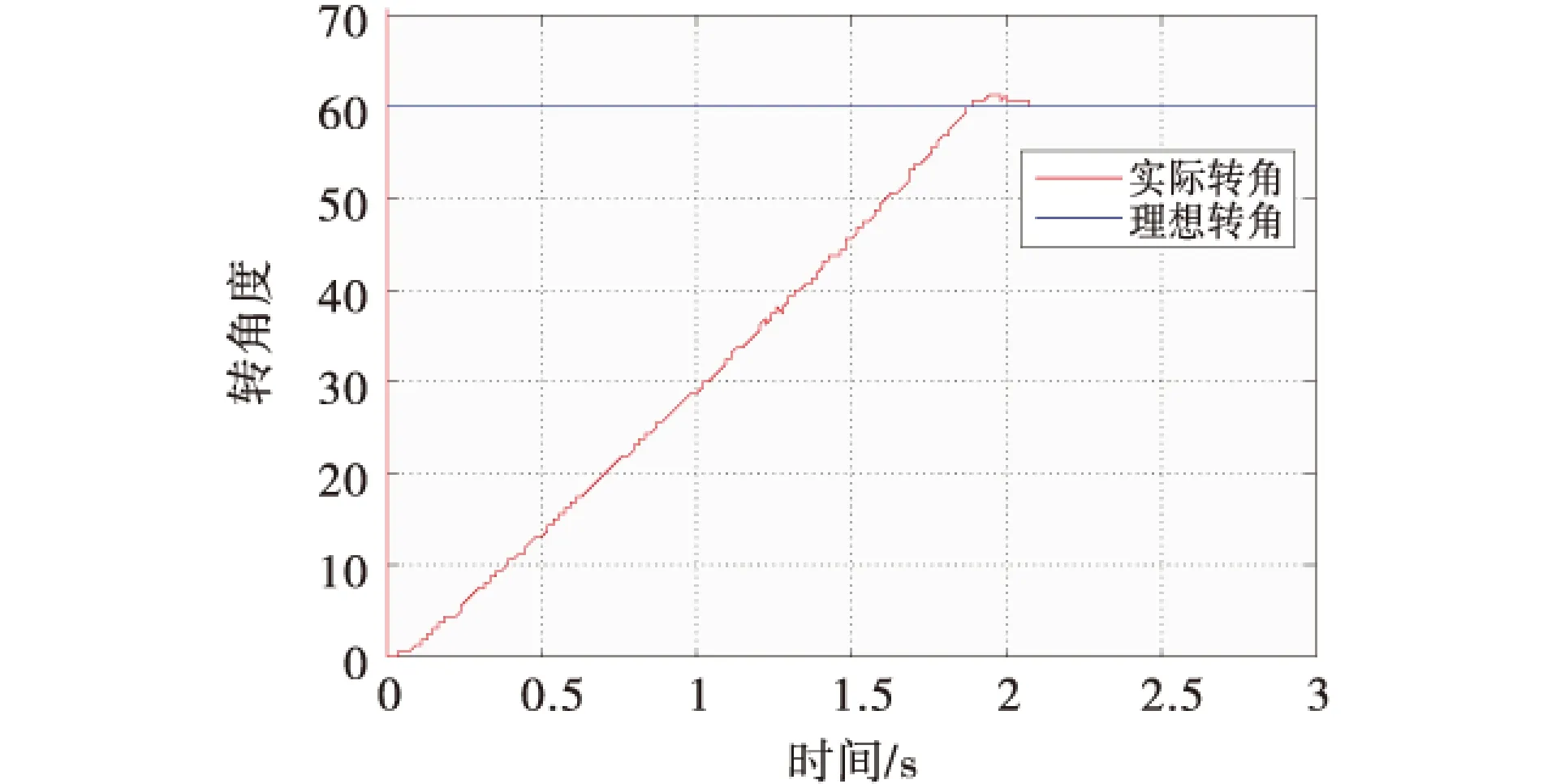
圖7 給定階躍信號的響應(yīng)曲線(經(jīng)典PID)
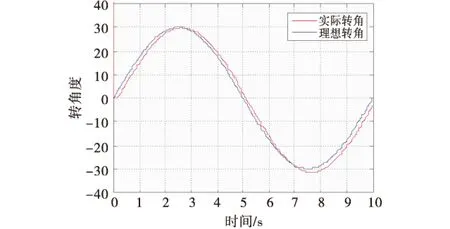
圖8 給定正弦信號的響應(yīng)曲線(經(jīng)典PID)
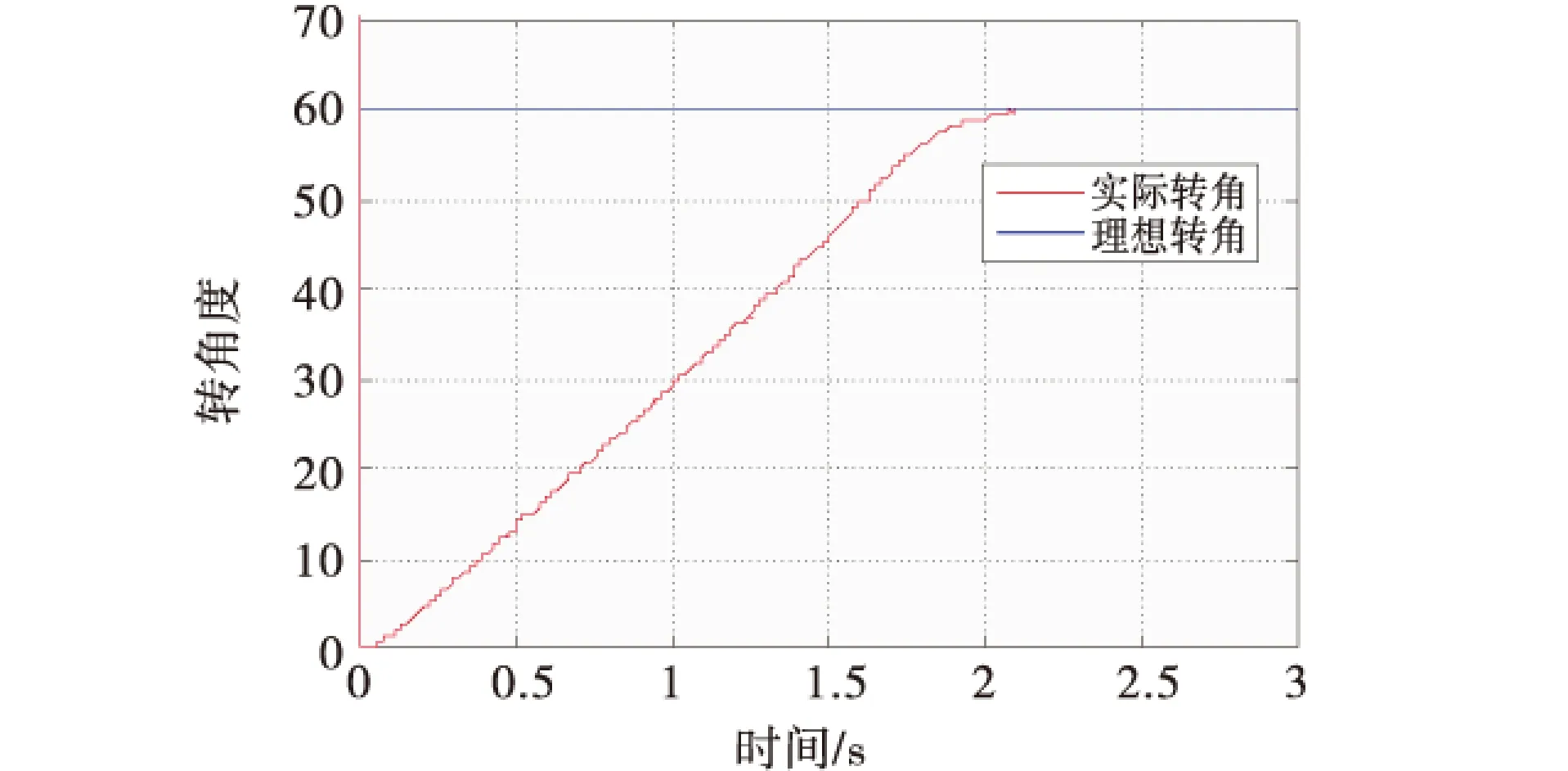
圖9 給定階躍信號的響應(yīng)曲線(模糊PID)
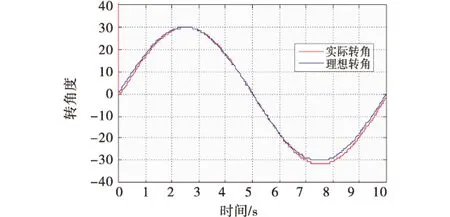
圖10 給定正弦信號的響應(yīng)曲線(模糊PID)
由以上控制系統(tǒng)仿真曲線可知:隨動裝置經(jīng)典PID控制系統(tǒng)存在嚴(yán)重的的超調(diào)和時(shí)滯現(xiàn)象,引入模糊PID自適應(yīng)控制器有效解決了系統(tǒng)的超調(diào)問題,引入復(fù)合控制器有效解決了系統(tǒng)的時(shí)滯問題.
2.4伺服控制試驗(yàn)平臺
對隨動裝置俯仰伺服控制系統(tǒng)進(jìn)行試驗(yàn),驅(qū)動裝置由SG7100-2型交流伺服驅(qū)動器與1FT5型交流永磁同步電機(jī)構(gòu)成.與聯(lián)合仿真一致,采用幅值為30°,周期為10 s的正弦信號作為理想輸入信號進(jìn)行試驗(yàn)調(diào)試.試驗(yàn)結(jié)果如圖13~14所示.
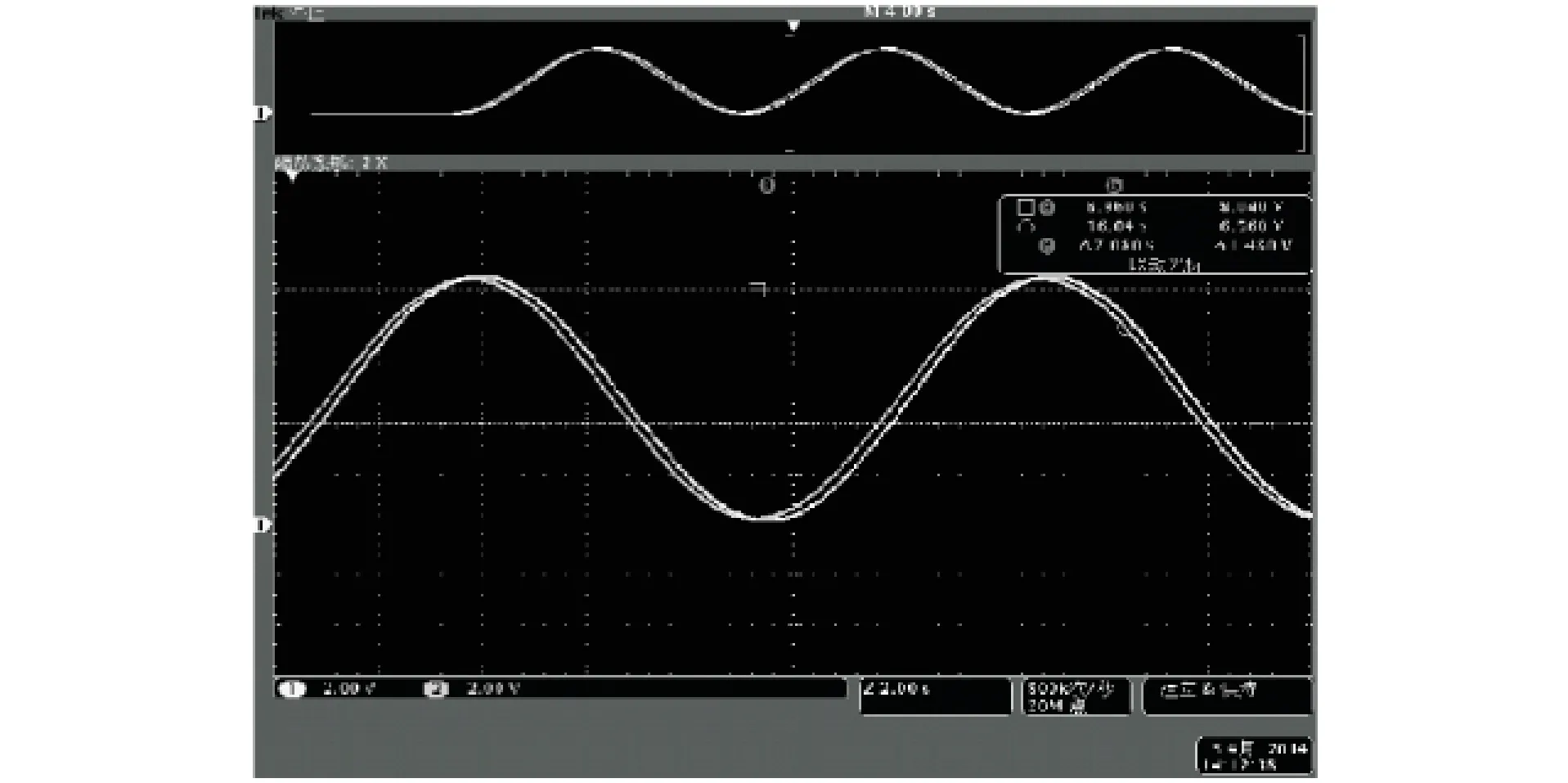
圖13 俯仰系統(tǒng)正弦跟蹤試驗(yàn)曲線(經(jīng)典PID)
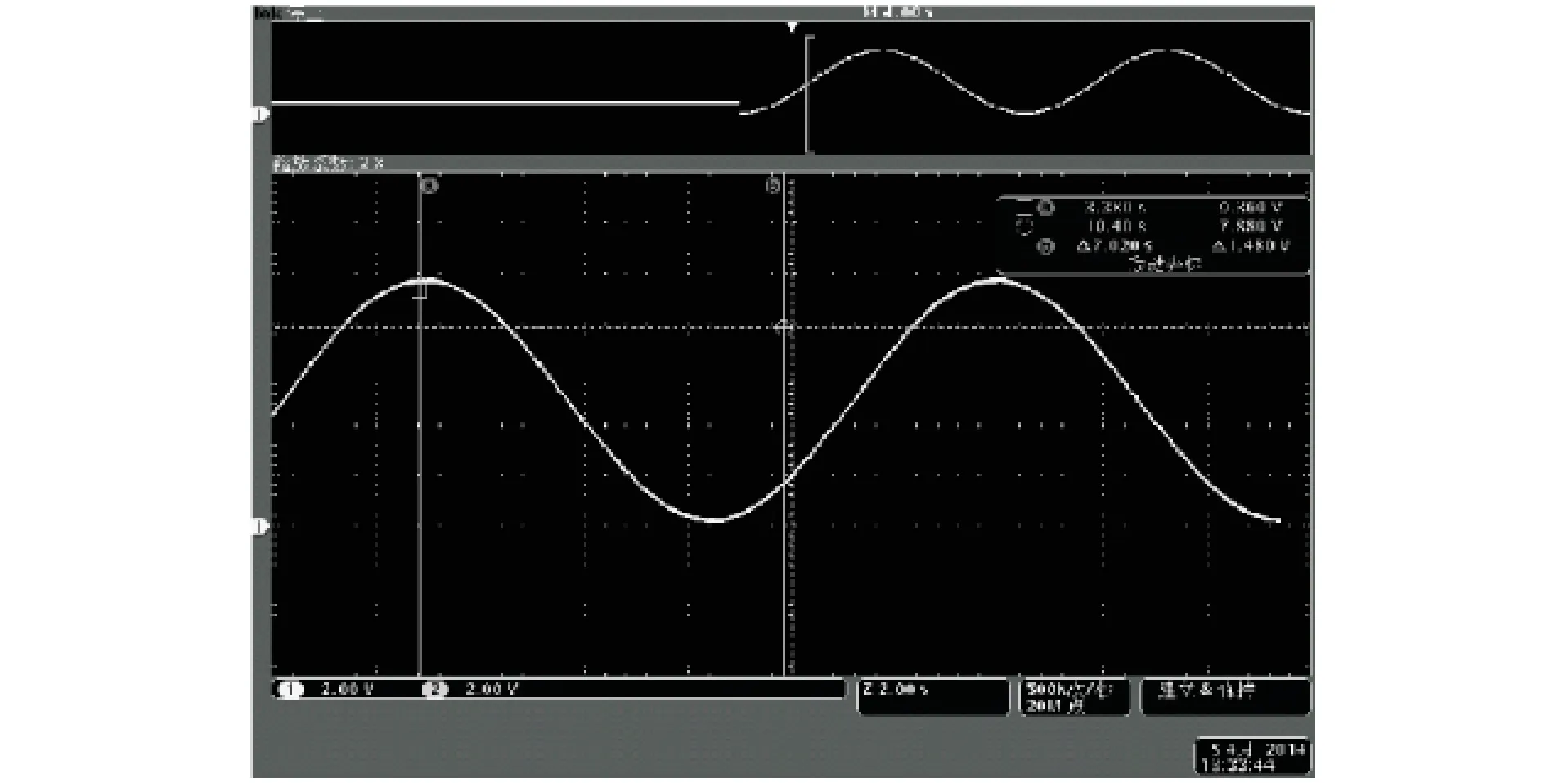
圖14 俯仰系統(tǒng)正弦跟蹤試驗(yàn)曲線(復(fù)合模糊PID)
由圖13、圖14可以看出,隨動裝置俯仰傳動控制系統(tǒng)試驗(yàn)調(diào)試與聯(lián)合仿真結(jié)果一致,驗(yàn)證了機(jī)械模型和控制系統(tǒng)建模的正確性和可行性,同時(shí)保證了隨動裝置運(yùn)轉(zhuǎn)的快速性與準(zhǔn)確性.
3性能評價(jià)及優(yōu)化
3.1動力學(xué)仿真
對隨動裝置俯仰運(yùn)動進(jìn)行動力學(xué)仿真,按ADAMS默認(rèn)求解器進(jìn)行動力學(xué)仿真分析,提取俯仰運(yùn)動動力學(xué)仿真結(jié)果如圖15所示.
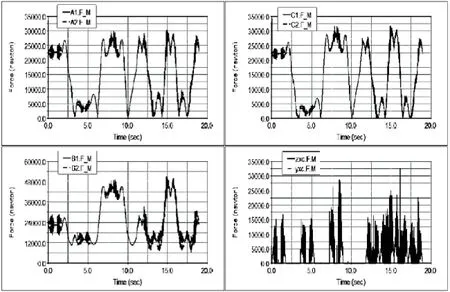
圖15 各關(guān)鍵零部件所受合力
由以上動力學(xué)仿真曲線可知:機(jī)構(gòu)A、B、C三鉸點(diǎn)的受力曲線變化趨勢基本一致,由于其雙傳動系統(tǒng)是對稱布局的,故俯仰雙傳動系統(tǒng)相對應(yīng)的鉸點(diǎn)受力應(yīng)基本相同,均承擔(dān)相應(yīng)負(fù)載力的一半,而圖15的動力學(xué)仿真結(jié)果剛好符合了這一點(diǎn).
3.2結(jié)構(gòu)強(qiáng)度分析
在保證產(chǎn)品功能與性能的基礎(chǔ)上,進(jìn)行主要零部件的有限元仿真分析評估,從而驗(yàn)證所設(shè)計(jì)出來的零部件結(jié)構(gòu)強(qiáng)度與剛度是否滿足要求,對于保證產(chǎn)品在工作過程中不出現(xiàn)主要零部件失效或破壞具有重要意義.
以隨動裝置固定基座為例進(jìn)行有限元仿真評估,施加動力學(xué)分析所獲得的約束與載荷,設(shè)置固定基座的總變形云圖和應(yīng)力云圖進(jìn)行求解,并提取其響應(yīng)云圖結(jié)果如圖16~17所示.
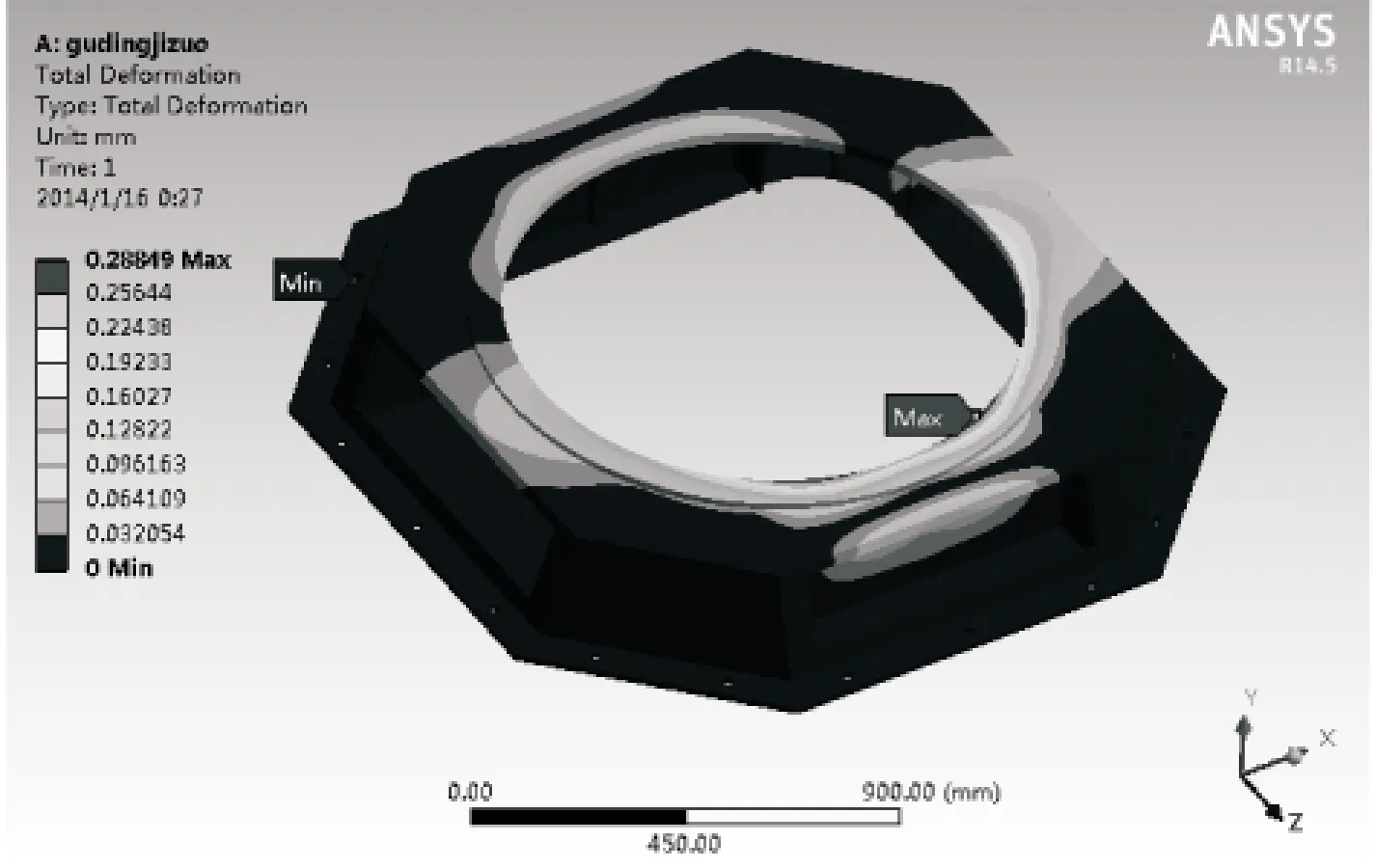
圖16 固定基座總變形云圖
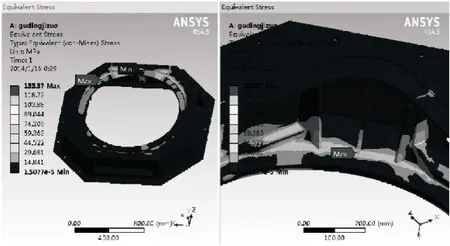
圖17 固定基座等效應(yīng)力云圖
由圖16、17可看出固定基座最大總變形量0.288 5 mm,為彈性變形,且位于與支撐軸承內(nèi)圈結(jié)合的支撐圓環(huán)板上,最大等效應(yīng)力為133.57 MPa,且位于固定基座支撐圓環(huán)板附近的支撐板頂端.固定基座選用的材料為Q235鋼材,故滿足設(shè)計(jì)要求.
3.3整機(jī)抗沖擊分析
論文研究的隨動裝置作為海上交戰(zhàn)的作戰(zhàn)平臺,不可避免地遭受沖擊環(huán)境的作用,遠(yuǎn)距離爆炸時(shí),由于水的不可壓縮性和氣泡的脈動作用,水中非接觸性爆炸對艦船及設(shè)備產(chǎn)生的沖擊加速度對設(shè)備和人員造成的損傷非常嚴(yán)重,因此進(jìn)行裝置的抗沖擊分析具有重要意義.隨動裝置抗沖擊分析是在模態(tài)分析基礎(chǔ)上完成的.首先計(jì)算整個(gè)隨動裝置的固有頻率與各階振型,取其前8階頻率及振型結(jié)果進(jìn)行模態(tài)分析.然后分別對隨動裝置在3個(gè)方向上進(jìn)行譜分析,然后進(jìn)行模態(tài)合成,得到隨動裝置在3個(gè)方向上的沖擊響應(yīng)情況.
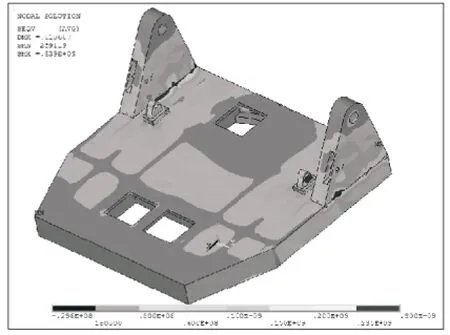
圖18 U型架橫向應(yīng)力云圖
由圖18可知,在橫向沖擊(Y方向)作用下,U型架的應(yīng)力超過235 MPa區(qū)域在U型架支撐與U型架聯(lián)接處以及U型架支撐正下方的底板處,需在這些地方進(jìn)行結(jié)構(gòu)改進(jìn).
3.4結(jié)構(gòu)拓?fù)鋬?yōu)化
對隨動裝置進(jìn)行結(jié)構(gòu)優(yōu)化有利于減輕產(chǎn)品重量和降低成本,以U型架為例對隨動裝置進(jìn)行拓?fù)鋬?yōu)化.首先,應(yīng)用有限元軟件畫出U型架的網(wǎng)格模型,導(dǎo)入到HyperWorks/OptiStruct軟件中,添加約束條件,設(shè)置優(yōu)化目標(biāo),進(jìn)行優(yōu)化計(jì)算,查看優(yōu)化結(jié)果如圖19所示.

圖19 U型架密度云圖
圖中藍(lán)色部分為小密度部分,即可去除材料部分,紅色部分為大密度部分,即保留材料部分.從圖19可以看出,U型架前端和中部受力較小,可以適當(dāng)去除材料,從而減輕質(zhì)量,優(yōu)化后的U型架三維模型如圖20所示,優(yōu)化結(jié)果見表2,優(yōu)化后U型架重量減輕9.2%.
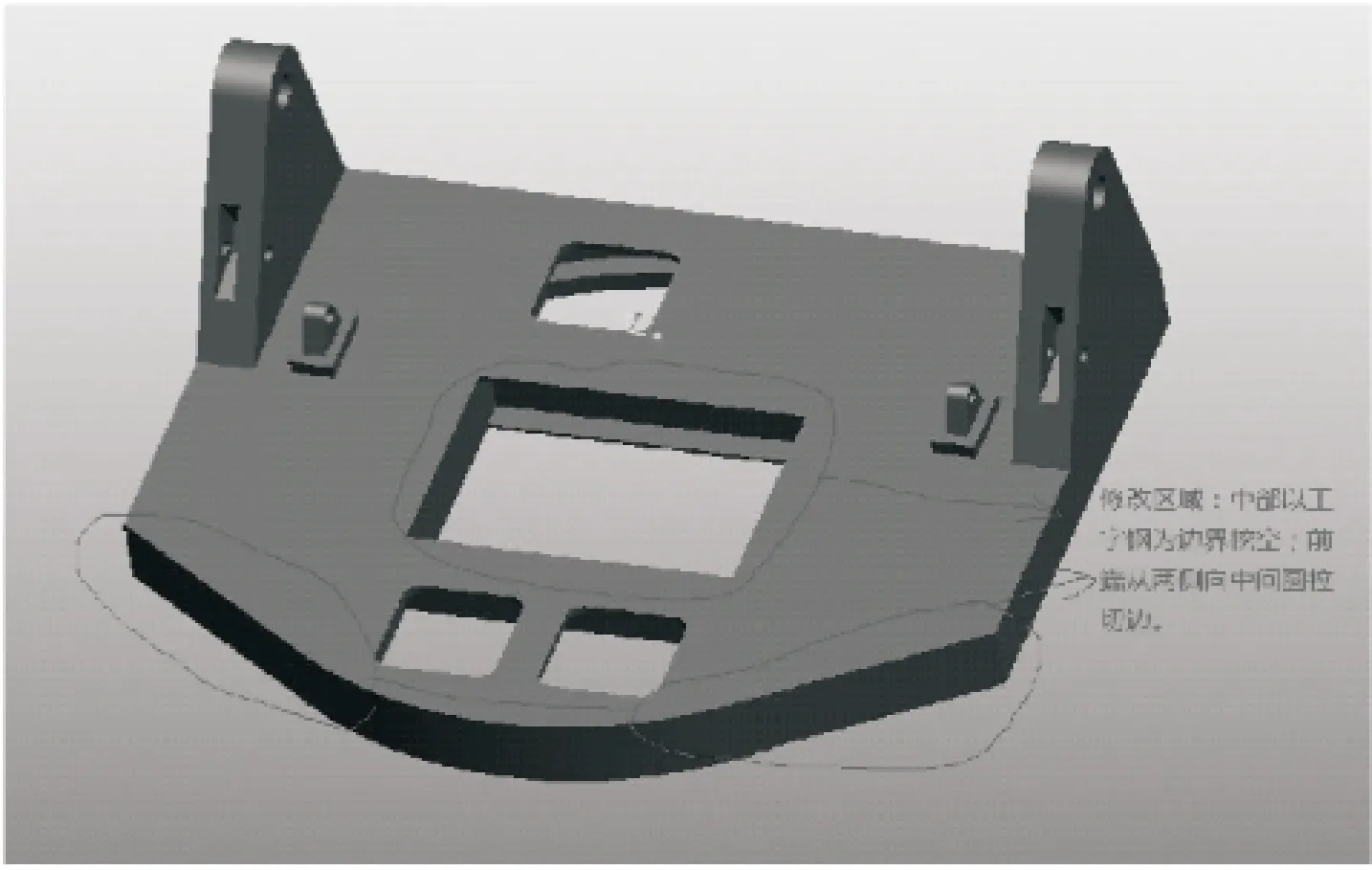
圖20 優(yōu)化后U型架三維圖

優(yōu)化前優(yōu)化后減輕質(zhì)量U型架質(zhì)量/kg56451252
4結(jié)語
針對隨動裝置數(shù)字化設(shè)計(jì)問題,進(jìn)行了從設(shè)計(jì)到分析到評估與優(yōu)化的關(guān)鍵技術(shù)研究.
1)進(jìn)行了產(chǎn)品設(shè)計(jì)需求分析,根據(jù)專家經(jīng)驗(yàn)完成隨動裝置的初步方案設(shè)計(jì),以俯仰傳動系統(tǒng)為例進(jìn)行了基于復(fù)合形優(yōu)化算法的俯仰傳動方案布局優(yōu)化,優(yōu)化后電動缸最大作用力減小28%,最小傳動角增加30%.
2)建立了隨動裝置虛擬樣機(jī)模型,以位置控制為目標(biāo)設(shè)計(jì)了控制系統(tǒng).通過虛擬樣機(jī)仿真與物理樣機(jī)伺服控制試驗(yàn),驗(yàn)證了虛擬樣機(jī)模型的正確性、控制策略的有效性和功能的可實(shí)現(xiàn)性.
3)對隨動裝置力學(xué)性能、零部件結(jié)構(gòu)強(qiáng)度、整機(jī)抗沖擊性能進(jìn)行了評價(jià)與改進(jìn),并以U型架為例進(jìn)行了結(jié)構(gòu)拓?fù)鋬?yōu)化,優(yōu)化后U型架重量減輕了9.2%.
4)研究結(jié)果表明:由系統(tǒng)方案優(yōu)化技術(shù)、虛擬樣機(jī)技術(shù)、現(xiàn)代控制技術(shù)、結(jié)構(gòu)拓?fù)鋬?yōu)化技術(shù)構(gòu)成的復(fù)雜機(jī)電系統(tǒng)數(shù)字化設(shè)計(jì)技術(shù),能夠?qū)崿F(xiàn)新產(chǎn)品設(shè)計(jì)過程的數(shù)字化,縮短產(chǎn)品開發(fā)周期,提高產(chǎn)品性能.
參考文獻(xiàn):
[1]Xu Wujiao, Qin Datong, Shi Wankai. Research and Development of a Digital Design System for Hull Structures[J]. Journal of Marine Science and Application,2007,19(2):37-43.
[2]郭東明,賈振元,王曉明,等. 理想材料零件的數(shù)字化設(shè)計(jì)制造方法及內(nèi)涵[J].機(jī)械工程學(xué)報(bào),2001,37(5):7-11,21.
[3]Khorshidi M, Soheilypour M, Peyro M, et al. Optimal Design of Four-bar Mechanisms Using a Hybrid Multi-objective GA with Adaptive Local Search[J]. Mechanism and Machine Theory,2011,46(10):1453-1465.
[4]方子帆,高術(shù),周剛,等.大俯仰機(jī)構(gòu)布局方案優(yōu)化方法及應(yīng)用研究[J].機(jī)械設(shè)計(jì)與研究,2015,31(1):17-21.
[5]赫赤,趙克定,許宏光.火炮液壓隨動系統(tǒng)性能參數(shù)測控系統(tǒng)設(shè)計(jì)[J].機(jī)床與液壓,2003(5):259-261.
[6]李斌茂,錢志博,程洪杰,等.AUV發(fā)動機(jī)的ADAMS/MATLAB聯(lián)合仿真研究[J].系統(tǒng)仿真學(xué)報(bào),2010,22(7):1668-1673.
[7]Dong-Chan Lee, Chang-Soo Han. CAE (computer aided engineering) Driven Durability Model Verification for the Automotive Structure Development[J]. Finite Elements in Analysis and Design, 2009, 45(5):324-332.
[8]Hong-Seok Park, Xuan-Phuong Dang. Structural Optimization Based on CAD-CAE Integration and Metamodeling Techniques[J]. Computer-Aided Design, 2010, 42(10):889-902.
[責(zé)任編輯王康平]
收稿日期:2015-10-08
基金項(xiàng)目:湖北省教育廳自然科學(xué)基金(D20141202);湖北省自然科學(xué)基金(2015CFB559);
通信作者:方子帆(1963-),男,教授,博士,博士生導(dǎo)師,主要研究方向?yàn)闄C(jī)械系統(tǒng)動力學(xué)與控制.E-mail:fzf@ctgu.edu.cn
DOI:10.13393/j.cnki.issn.1672-948X.2016.02.015
中圖分類號:TJ303+.8
文獻(xiàn)標(biāo)識碼:A
文章編號:1672-948X(2016)02-0065-06
Research on Digital Design Key Technologies of Servo Device and Their Applications
Fang Zifan1,2,3Yang Shouqi1Cao Gang1Qin Tao1Ma Zhenwu1Du Yixian1,2He Kongde1
(1. College of Mechanical & Power Engineering, China Three Gorges Univ., Yichang 443002, China; 2. New Energy and Micro Grid Collaborative Innovation Center in Hubei Province, China Three Gorges Univ., Yichang 443002, China; 3. Hubei Key Laboratory of Hydroelectric Machinery Design and Maintenance, China Three Gorges Univ., Yichang 443002, China)
AbstractIn order to solve the traditional design mode of the device with high cost, long cycle and poor quality problems, by using the digital design method, some researches on the design, virtual prototype and function analysis, control strategy, performance evaluation and optimization of key technology for servo device and their applications, are carried out. According to the demand analysis, the preliminary design of servo device is made; application of optimization algorithm to optimize the layout of pitch drive system is made. After optimization, the optimized electric cylinder maximum force decreases 28%; the minimum transmission angle is increased by 30%. A servo device virtual prototype model is built to achieve the goal of displacement, design of the control system. Through the simulation of virtual prototype and the physical prototype servo control test, the correctness of the virtual prototype model and the feasibility of the function are verified. At last, some valuation and improvment structure of the servo device about mechanical properties, strength and the impact resistance are analyzed; and then taking U-type frame for example of the frame structure topology optimization, after optimization the U-type frame weight decreased 9.2%.The results show that the scheme of the system optimization technology, virtual prototype technology, modern control methods, and topology optimization technology of complex mechanical system digitial design technology, can realize the process of new product design digital,shorten the product development cycle and improve product performance.
Keywordsservo device;virtual prototype;performance analysis;control strategy;structure optimization;digital design
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
科技視界(2016年18期)2016-11-03 20:33:59
中國科技博覽(2016年18期)2016-10-19 10:38:31
中國市場(2016年33期)2016-10-18 14:10:51
中國市場(2016年33期)2016-10-18 14:03:59
商業(yè)經(jīng)濟(jì)研究(2016年14期)2016-09-14 08:58:20
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
