狀態(tài)信息和軌道信息下的非合作目標精密跟蹤技術*
2016-08-02 07:25:54孫守明李恒年
彈箭與制導學報 2016年2期
黃 普,孫守明,李恒年
(宇航動力學國家重點實驗室,西安 710043)
?
狀態(tài)信息和軌道信息下的非合作目標精密跟蹤技術*
黃普,孫守明,李恒年
(宇航動力學國家重點實驗室,西安710043)
摘要:針對隨機脈沖推力控制下的空間機動目標跟蹤問題,提出一種基于狀態(tài)信息和軌道信息的實時跟蹤算法。該算法通過基于機動推力a-β動力學模型和改進當前統(tǒng)計模型的并行計算濾波器,完成空間非合作目標高精度實時跟蹤。同時,利用直觀的軌道信息,完成機動檢測,采取重置濾波參數(shù)的方式獲得更快的收斂速度和穩(wěn)健性。仿真實驗表明該算法可有效檢測機動,實現(xiàn)了對非合作目標機動目標的軌道確定,具有一定的工程實用性。
關鍵詞:狀態(tài)信息和軌道信息;a-β動力學模型;改進當前統(tǒng)計模型
0引言
隨著航天科技的進步,空間攻防對抗與預警任務成為趨勢,如何利用觀測信息,實現(xiàn)對機動目標,特別是非合作機動目標的高精度實時跟蹤,成為地面測控系統(tǒng)急需解決的問題。
傳統(tǒng)的非合作機動目標跟蹤方案包括3個方面:
1)建立動力學模型,通常包括高斯白噪聲加速度模型及馬爾科夫隨機過程加速度模型[1-3]。白噪聲加速度模型假設加速度特性滿足白噪聲,并不符合實際,故收斂速度慢;馬爾科夫隨機過程加速度模型假定加速度特性滿足一階馬爾科夫過程,比較符合實際,但對加速度的二階特性沒有準確描述。
2)建立非線性濾波器,常用的工程算法包括擴展卡爾曼濾波器(EKF)與無跡卡爾曼濾波器(UKF),國內外相關文獻很多[4-5]。
3)制定機動檢測策略[6-13],常見的機動檢測策略包括基于測量新息及其統(tǒng)計特性檢測與基于輸出狀態(tài)估計檢測。
雖然已經(jīng)發(fā)展了許多非合作目標跟蹤算法,但對于幅值及時間均未知的脈沖推力控制下的非合作機動目標跟蹤問題,研究的還不夠深入,為此,文中在傳統(tǒng)方案基礎上,提出新的改進措施,旨在實現(xiàn)隨機脈沖推力控制下非合作目標的連續(xù)平穩(wěn)精確跟蹤,在動力學模型方面,提出a-β動力學模型,在馬爾科夫隨機過程加速度模型基礎上,引入輔助變量β,對推力加速度二階特性進行準確描述,提高算法收斂性和精度;在機動檢測策略上,考慮到運動學模型對機動的敏感性,提出運動學模型下的軌道信息機動檢測策略。
1聯(lián)合濾波器設計
文中從空間機動目標的跟蹤與檢測入手,設計一種聯(lián)合濾波器接收觀測數(shù)據(jù),完成狀態(tài)估計與機動檢測,其處理流程如圖1所示。
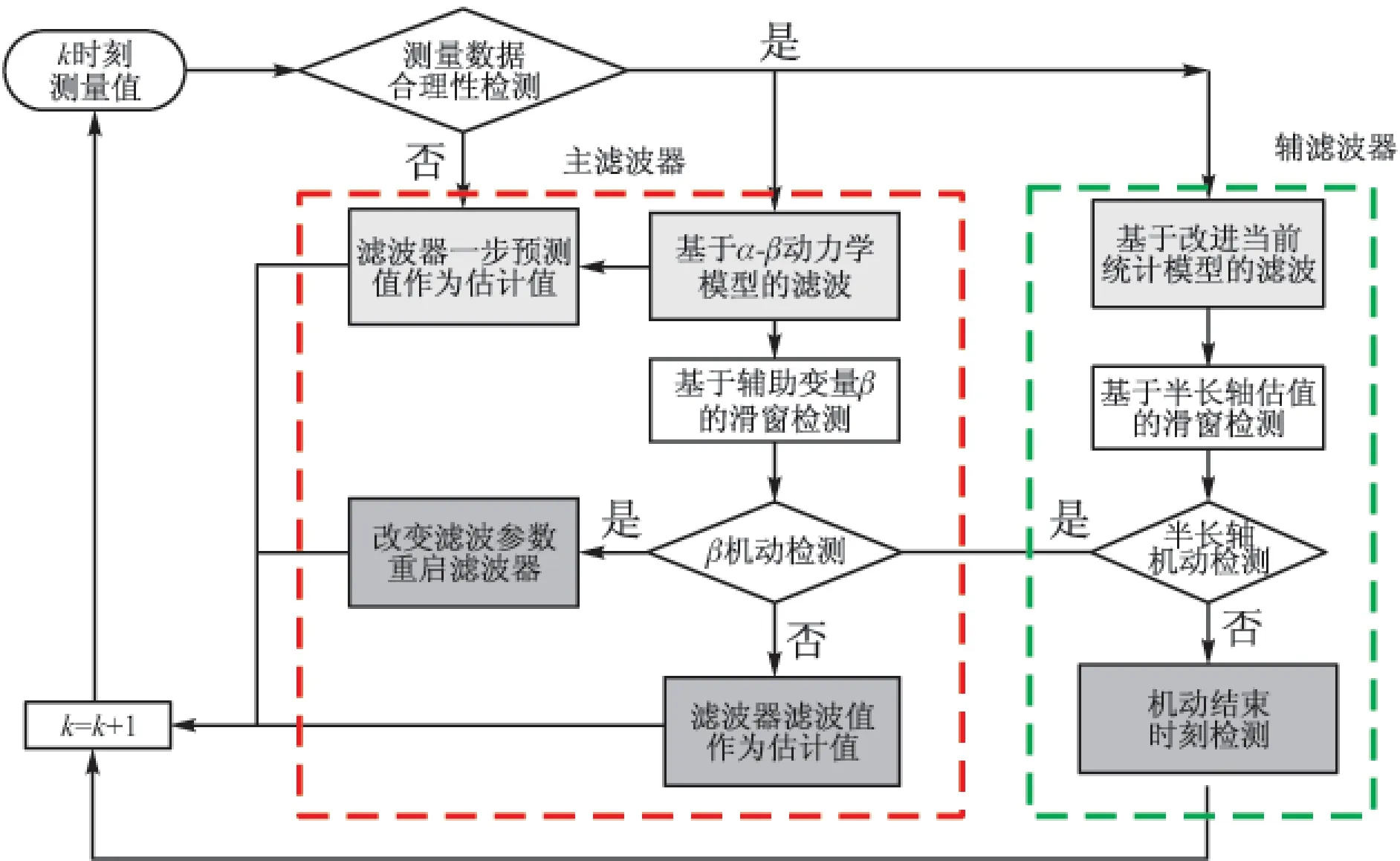
圖1 聯(lián)合濾波器跟蹤非合作目標流程圖
主濾波器,從動力學模型入手,通過引入輔助變量,對推力加速度建立恰當?shù)奈⒎帜P?避免衛(wèi)星質量和比沖的不確定性引起推力加速度的估計誤差,可獲得更快的收斂速度和濾波精度。同時,利用模型的輔助變量β物理特性,作為輔助機動檢測判斷,其輸出值作為目標的跟蹤結果。
副濾波器,從運動學模型對觀測信息的敏感性入手,采用改進當前統(tǒng)計模型,具有很強的機動敏感性及自適應性,同時將濾波輸出轉化為軌道信息,從半長軸的變化監(jiān)測目標是否發(fā)生機動,其輸出結果作為目標檢測的主要判據(jù)。
對于已經(jīng)檢測出來機動的濾波器,需要通過調整濾波參數(shù)P和Q完成多模型切換,提高狀態(tài)方程與飛行狀態(tài)的匹配程度,也可采用重啟濾波器的方式獲得更快的收斂速度和濾波穩(wěn)健性。
2主濾波器設計
2.1基于a-β動力學模型的建立

(1)
式中:r為目標相對地心慣性系的位置矢量;v為目標相對地心慣性系的速度矢量;a為目標相對地心慣性系的推力加速度,在推力加速度未知情況下可設為0,在濾波估計中進行實時估計。β為推進發(fā)動機質量消耗量與當前質量比,在未知情況下可設為0,在濾波估計中進行實時估計。
其中:J2=1.082 63×10-3為二階帶諧項系數(shù);μ=3.986 005×1014(m3/s2)為地球引力常數(shù);地球赤道半徑Re=6 378 140.0 m。
式(1)可以應用各種非線性濾波算法求解,常用的包括EKF和UKF。UKF以UT變換為基礎,采用確定性采樣獲得預測信息,性能優(yōu)于EKF。文中采用UKF[5]濾波算法獲得更高的跟蹤精度。
2.2基于狀態(tài)信息的β機動檢測
基于狀態(tài)信息的β機動檢測方法[7],通過分析加速度模型中輔助變量β的物理特性,為機動脈沖后沿檢測提供依據(jù),檢測流程如下:
步驟1初始化。對于非合作目標,初始加速度未知,故設置初始狀態(tài)a=β=0。
步驟2當目標機動時,輔助變量β會發(fā)生變化,當β<0時,與β的物理意義不符,此時可以判斷脈沖機動結束。
步驟3考慮到脈沖機動時刻很短,基于狀態(tài)信息的β機動檢測可以準確及時的檢測脈沖機動。
3輔濾波器實現(xiàn)
3.1基于當前統(tǒng)計模型的濾波
隨機脈沖的機動是一種動力學特性未知的情形,可通過目標運動學信息建立隨機過程逼近運動狀態(tài),而當前統(tǒng)計模型的要義是:利用修正瑞利分布函數(shù)描述目標當前加速度概率密度,更加符合目標機動范圍和強度的實際變化,同時,其均值和方差之間存在關系,以此可以用來建立卡爾曼濾波的自適應算法。因此,這里的輔濾波器采用當前統(tǒng)計模型。
當目標以某一加速度機動時,采用零均值模型不合理,采用加速度的非零均值時間相關模型,即令:
(2)

(3)
由于該算法可根據(jù)機動加速度自動調整方差,具有很好的自適應性,但是需要預先給定機動頻率和加速度極值,而這些參數(shù)對于非合作目標是很難實現(xiàn)的,因此提出一種改進當前統(tǒng)計模型,利用位移公式及測量新息(預測值與觀測值之差),實時在線估計加速度方差,提高算法的自主運行能力。
依據(jù)位移公式,可得位移預測值:
(4)
而位移實測值為:
(5)
則測量新息為:
(6)
考慮到測量過程中存在的零均值高斯白噪聲,測量新息為:
(7)
目標加速度變化與觀測隨機誤差是獨立的,可得:
(8)
因此可建立測量新息與加速度變化量之間的關系,實時在線估計加速度方差。
(9)
當目標發(fā)生機動時,運動模型發(fā)生變化,預測新息與實際觀測值出現(xiàn)偏差,機動越大,偏差越大,由式(9)可知,測量新息偏差與加速度方差成線性關系,導致機動加速度的方差增大。因此,文中的方差計算方法可以與目標的機動程度相適應,提高機動靈敏性。
3.2基于軌道根數(shù)估值的機動檢測
由計算經(jīng)驗可知,運動學模型對測量信息的變化異常敏感,當目標發(fā)生機動后,軌道能量迅速發(fā)生改變,直觀的變化是軌道信息的變化,例如半長軸、偏心率和傾角等[13]。檢測相鄰數(shù)據(jù)點間軌道半長軸的變化是否超過正常變化范圍,就可以推測兩點間是否發(fā)生機動。因此,可將半長軸的變化作為機動檢測判據(jù)。

(10)
對于高斯分布,閾值α通常取值3~6。為了提出“機動野值”,降低檢測虛警,可設置檢測原則為連續(xù)若干點滿足式(10)時為機動開始。
4仿真分析
下面仿真分析非合作空間目標機動過程中主副濾波器的性能。觀測數(shù)據(jù)采用單站雷達仿真數(shù)據(jù)(R,A,E,dR),隨機誤差按照設備提供,測距50m,測速0.1m/s。仿真時長為2 150s,濾波初值誤差考慮在3個方向的位置和速度上分別加20m和0.5m/s的常值誤差。圖2表示飛行器機動全過程三維彈道曲線;圖3表示飛行器的機動控制加速度變化曲線存在5次隨機脈沖機動;圖4表示當不采用機動檢測器時濾波全過程位置誤差,在機動發(fā)生后位置誤差逐漸增大、發(fā)散。

圖2 空間目標三維曲線
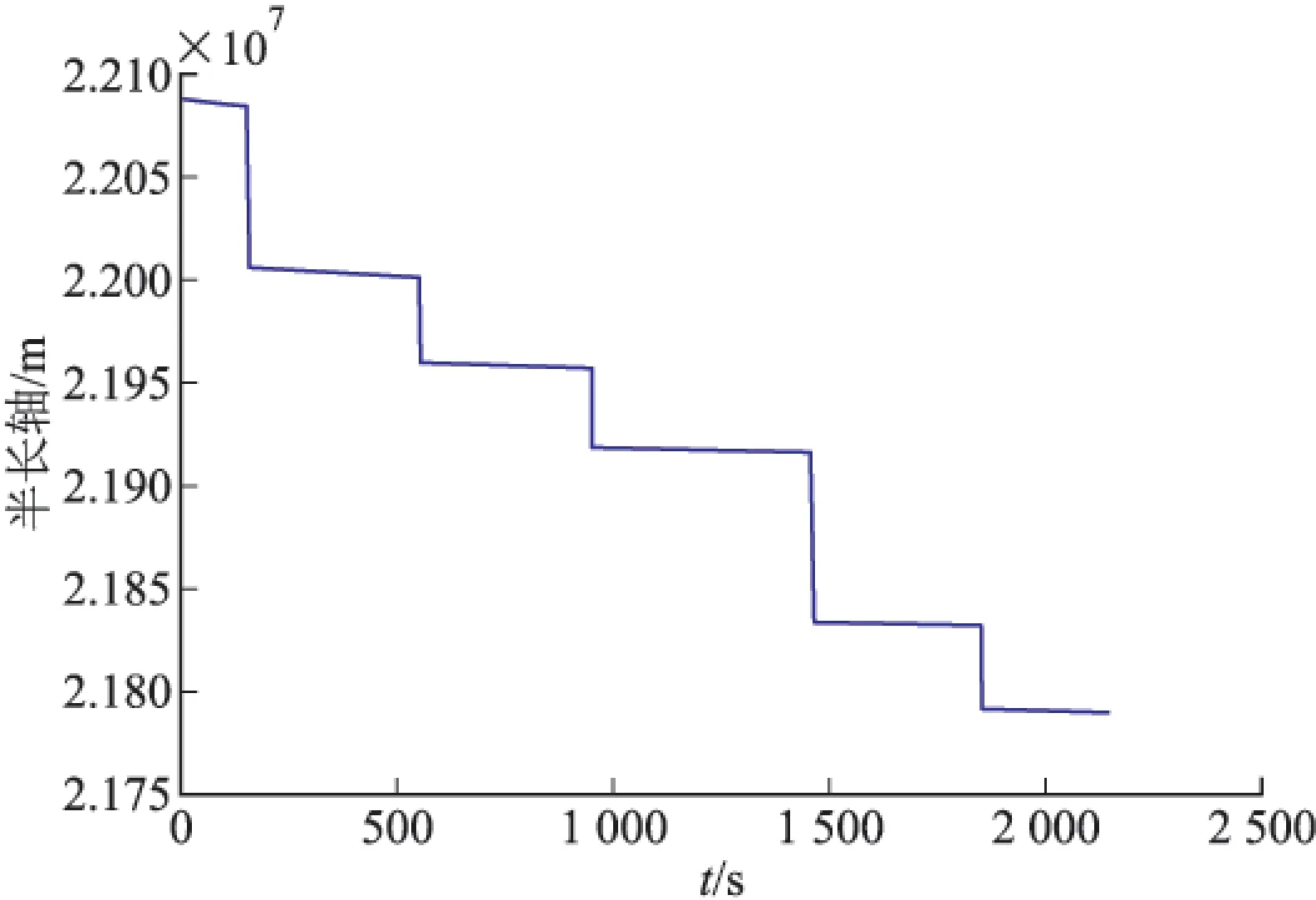
圖3 空間目標半長軸變化曲線
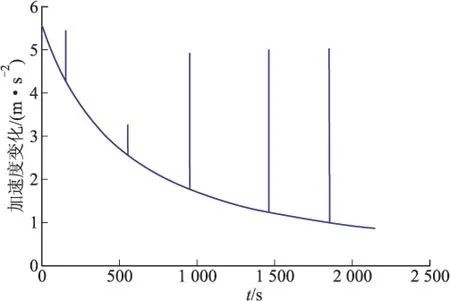
圖4 空間目標機動加速度變化曲線
4.1主濾波器的狀態(tài)估計
圖5給出了主濾波器采用a-β模型時的半長軸估計結果,濾波算法采用UKF算法,濾波過程并未進行機動檢測,可見主濾波器跟蹤曲線整體較為平滑,但在機動前后出現(xiàn)較大變化。圖6為主濾波器通過基于輔助變量β檢測濾波的結果,當檢測到目標機動后,濾波器通過調整濾波參數(shù)P和Q完成多模型切換,實現(xiàn)快速收斂。
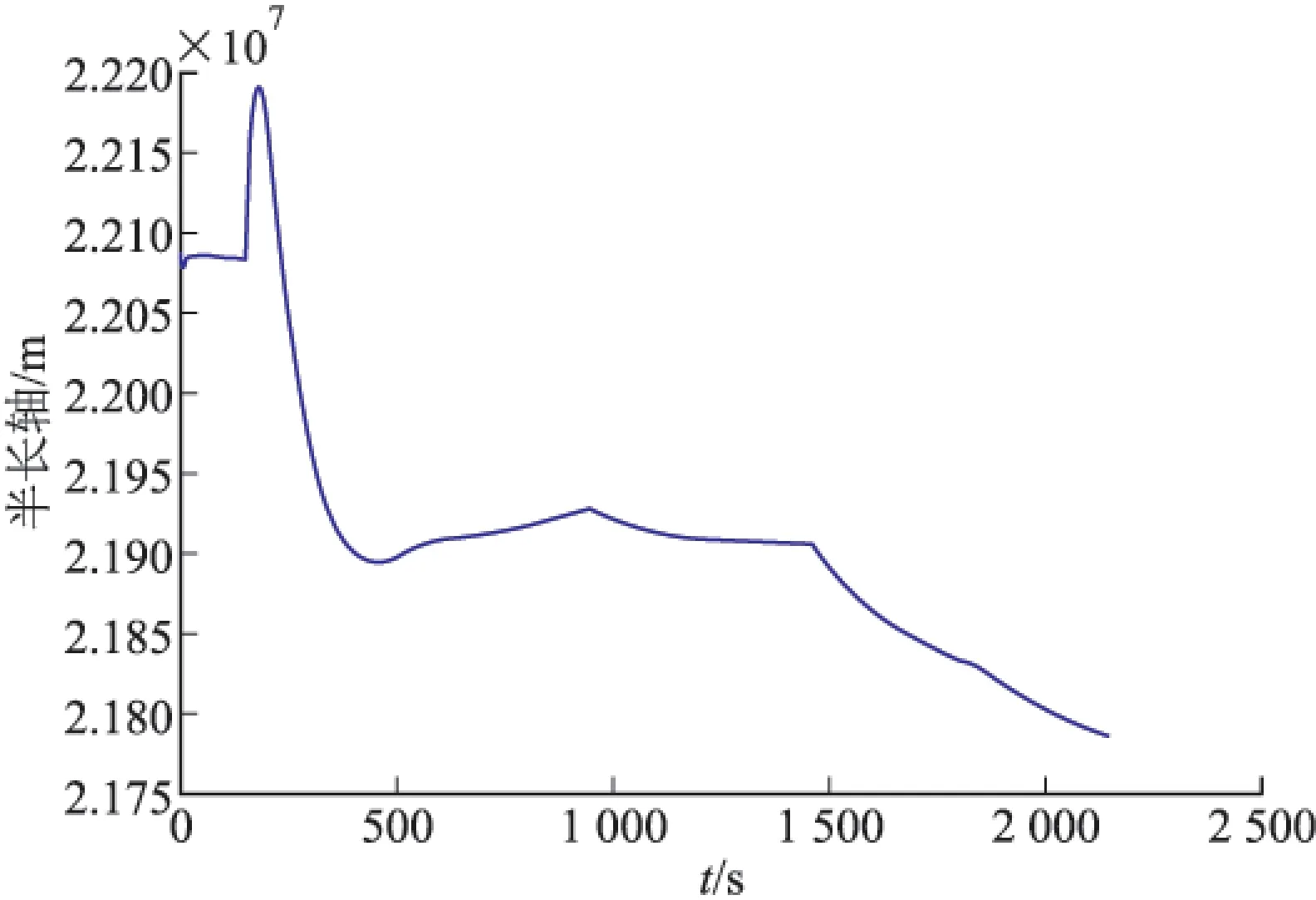
圖5 無機動檢測時的主濾波器軌道半長軸估值
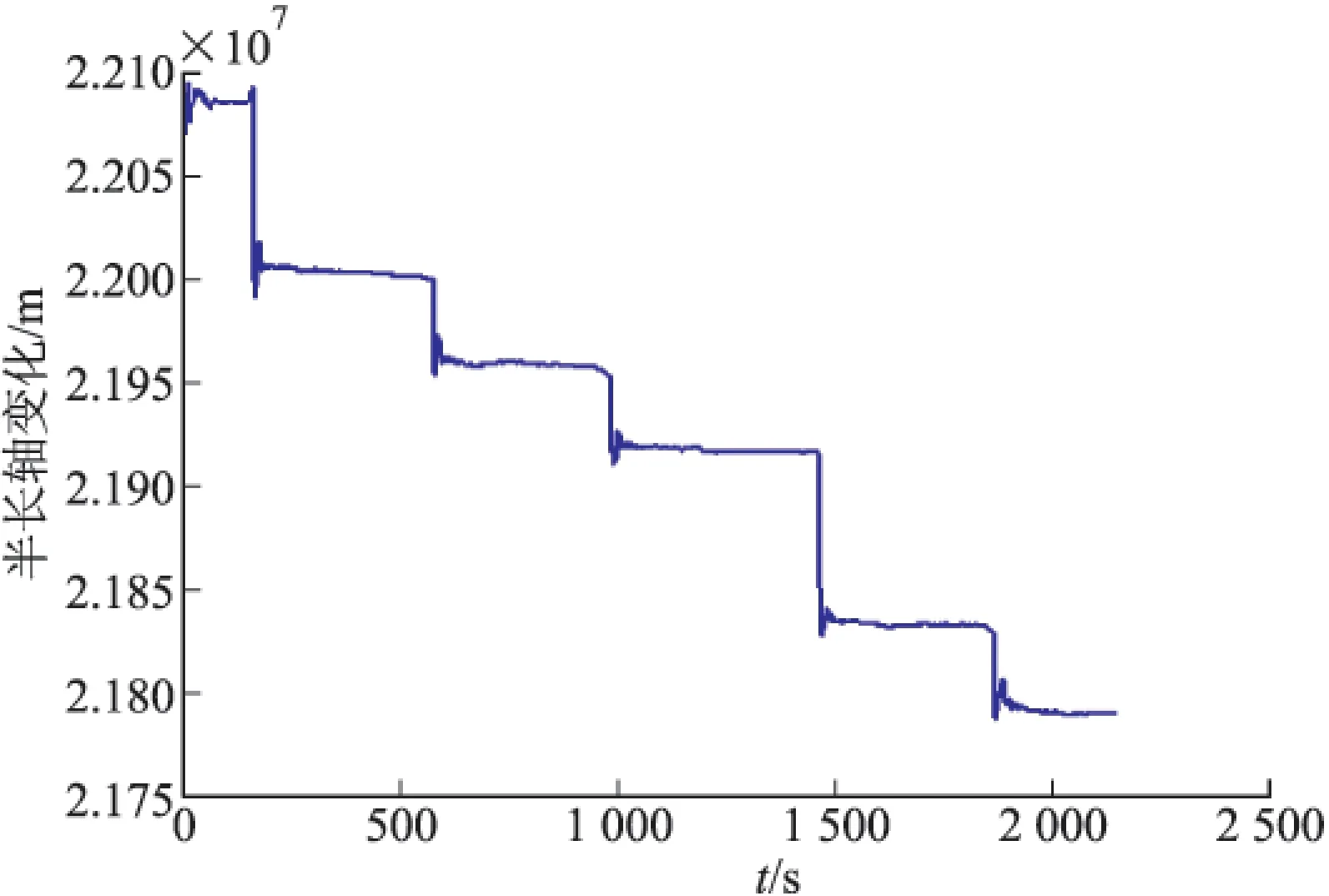
圖6 基于輔助變量β的主濾波器軌道半長軸估值
4.2副濾波器的機動檢測
圖7給出了輔濾波器采用改進當前統(tǒng)計模型時的半長軸估計結果,濾波算法采用UKF,從運動學模型對觀測信息的敏感性入手,利用位移公式及測量新息,實時在線估計加速度方差,提高算法機動敏感性及自適應性,同時將濾波輸出轉化為軌道信息,從半長軸的變化監(jiān)測目標是否發(fā)生機動,其輸出結果作為目標檢測的主要判據(jù)。
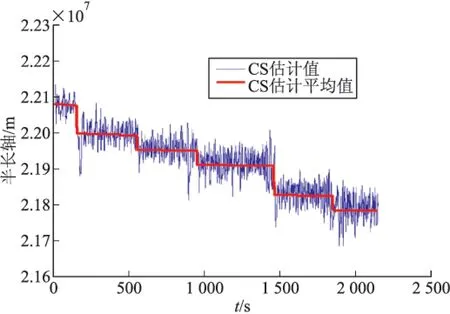
圖7 副濾波器軌道半長軸估值
表1給出了傳統(tǒng)當前統(tǒng)計模型與改進當前統(tǒng)計模型的機動檢測時刻,由此可見兩種方法檢測基本時間相同,但傳統(tǒng)當前統(tǒng)計模型需要設置加速度范圍與機動頻率,而改進當前統(tǒng)計模型不需要,具有自適應性。
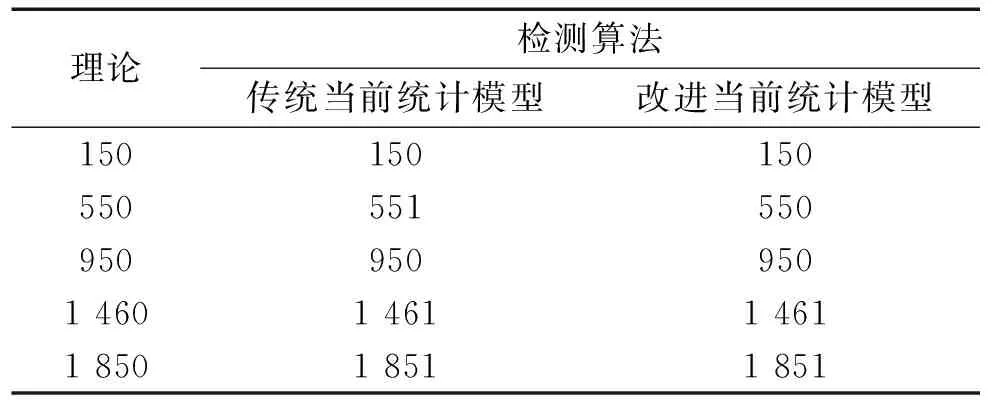
表1 兩種當前統(tǒng)計模型的機動檢測時刻 s
4.3主輔濾波器聯(lián)合跟蹤
圖8為采用主輔濾波器聯(lián)合跟蹤非合作目標的軌道半長軸變化圖,其中主濾波器引入基于輔助變量β的滑窗機動檢測;輔濾波器引入基于半長軸估計值的滑窗機動檢測,并將結果反饋給主濾波器。圖8~圖10為主輔濾波器聯(lián)合跟蹤非合作目標的位置、速度變化偏差圖,從圖中可以看出機動時刻位置偏差不超過100m,速度偏差不超過30m/s,非機動時刻位置偏差不超過40m,速度偏差不超過0.5m/s。
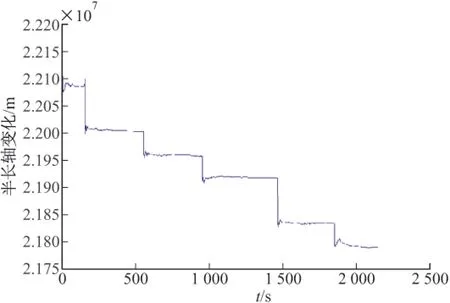
圖8 主副濾波器聯(lián)合跟蹤的軌道半長軸估值
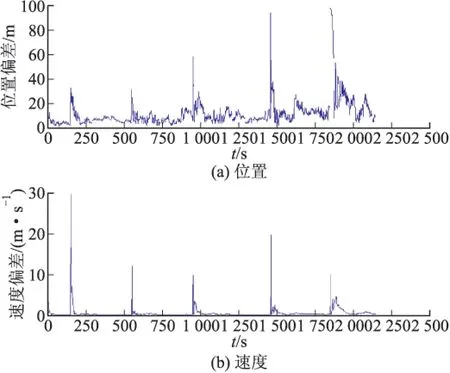
圖9 主輔濾波器聯(lián)合跟蹤的位置速度總偏差
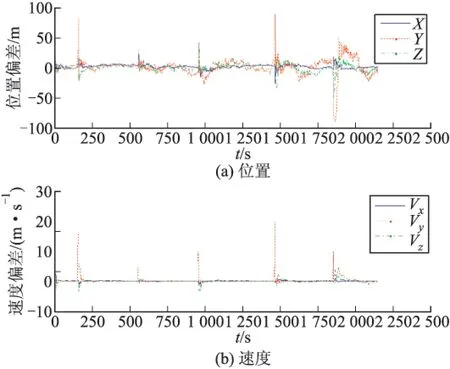
圖10 主輔濾波器聯(lián)合跟蹤的三向位置速度偏差
5結論
文中針對隨機推力控制下的空間機動目標跟蹤精度問題,提出一種基于主副濾波器的實時跟蹤算法。該算法建立主副兩個濾波器,主濾波器采用動力學模型,通過狀態(tài)約束完成空間非合作目標實時高精度跟蹤;副濾波器采用改進當前統(tǒng)計模型,通過運動模型對觀測信息的靈敏性完成機動檢測。檢測機動后,通過改變?yōu)V波參數(shù)獲得更快的收斂速度和濾波穩(wěn)健性。仿真實驗驗證了算法的有效性,同時獲得如下結果:
1)仿真實驗中測量數(shù)據(jù)質量高,在濾波重啟后的初值可以準確獲得,濾波算法可以快速收斂,收斂后跟蹤曲線比較平穩(wěn);
2)主濾波器采用a-β模型,通過引入輔助變量β,對推力加速度建立恰當?shù)奈⒎帜P?可獲得更快的收斂速度和濾波精度;
3)從副濾波器的機動檢測結果可以看出,目標機動共有5次,分別發(fā)生在相對時刻150 s,550 s,950 s,
1 461 s,1 851 s,與理論時刻基本一致;
4)改進當前統(tǒng)計模型與傳統(tǒng)當前統(tǒng)計模型相比,對目標機動反應同樣靈敏,但改進當前統(tǒng)計模型可以自適應進行機動辨識和跟蹤,適合工程應用。
參考文獻:
[1]LI X R, JILKOV V P. A Survey of maneuvering target tracking, part V: Multiple-model methods [J]. IEEE Trans. on AES, 2005, 41(4): 1255-1321.
[2]LI X R, JILKOV V P. A survey of maneuvering target tracking, part I: Dynamic models [J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1333-1364.
[3]LI X R, JILKOV V P. A survey of maneuvering target tracking, part II: Ballistic target models [C]∥Proceedings of 2001 SPIE Conference on Signal and Data Processing of Small Targets, CA, USA, 2001: 1-23.
[4]LI X R, JILKOV V P. A survey of maneuvering target tracking, confer ence part IV: Decision-based methods [C]∥ Proc. SPIE on Signal and Data Processing of Small Targets 2002: 1-5.
[5]JULIER S J, UHLMANN J K. New extension of the Kalman filter to nonlinear systems [C]∥ Proc. SPIE 3068 Signal Processing, Sensor Fusion, and Target Recognition VI, Orlando, 1997: 54-65.
[6]李恒年, 李濟生, 黃永宣. 軌道機動過程中推力加速度的在線最小方差估計 [J]. 空間科學學報, 2002, 22(4): 357-362.
[7]黃普, 錢山, 李恒年. 應用觀測新息和狀態(tài)信息檢測聯(lián)合脈沖機動 [J]. 國防科技大學學報, 2014, 36(3): 164-168.
[8]NAMRATA V. Additive change detection in nonlinear systems with unknown change parameters [J]. IEEE Trans Signal Proc, 2007, 55(3): 859-872.
[9]范紅旗, 王勝, 付強. 目標機動檢測算法綜述 [J]. 系統(tǒng)工程與電子技術, 2009, 31(5): 1065-1070.
[10]周宏仁, 敬忠良, 王培德. 機動目標跟蹤 [M]. 北京: 國防工業(yè)出版社, 1991: 56-60.
[11]劉也, 余安喜, 張增輝, 等. 空間目標跟蹤的穩(wěn)健融合方法與實現(xiàn) [J]. 系統(tǒng)工程與電子技術, 2011, 33(9): 1941-1947.
[12]張振軍, 董云峰. 基于小波分析的目標軌道機動自主檢測方法 [J]. 北京航空航天大學學報, 2008, 34(13): 353-356.
[13]于大騰, 王華, 尤岳, 等. 不完備軌道信息下的LEO軌道面內機動檢測方法 [J]. 宇航學報, 2013, 34(3): 314-319.
*收稿日期:2015-04-27
基金項目:國家自然科學基金(61302098)資助
作者簡介:黃普(1982-),男,陜西韓城人,工程師,碩士,研究方向:飛行器控制系統(tǒng)。
中圖分類號:TP316
文獻標志碼:A
Non-cooperative Target Precision Tracking Technology Based on Input and Orbit Information
HUANG Pu,SUN Shouming,LI Hengnian
(State Key Laboratory of Astronautic Dynamics, Xi’an 710043, China)
Abstract:A new method was presented based on input and orbit information for space non-cooperative target tracking during random thrust maneuvering process. It is composed by two filters in parallel, the main one is constructed by dynamic model and the auxiliary one is constructed by improved current statistic model. The two filters run for estimating real-time and precise filtering results. Meanwhile, maneuver detection is done based on the orbit information. If the maneuver is detected, changing filter parameters are introduced to obtain faster and smooth tracking results. Simulations show that the result of the new algorithm is much superior to traditional ones. The algorithm has certain engineering practicability.
Keywords:input and orbit information; a-β dynamic model; improved current statistic model