長時間在軌空間飛行器可見光導引頭復用技術研究
2016-08-09 18:54:16張俊
航天控制 2016年2期
張 俊
1.宇航智能控制技術國家級重點實驗室,北京 100854 2.北京航天自動控制研究所,北京 100854
?
長時間在軌空間飛行器可見光導引頭復用技術研究
張 俊1,2
1.宇航智能控制技術國家級重點實驗室,北京 100854 2.北京航天自動控制研究所,北京 100854

目前,空間飛行器實用化已經進入新的階段,空間飛行器的目標探測處理技術一直是發展的焦點,本文提出了一種星光導航/可見光目標檢測導引頭復用技術,利用可見光導引頭完成星光導航及目標探測任務,采取綜合控制軟件分段控制配置導引頭參數,分別完成導航、目標探測兩個圖像處理任務。其優點是在完成任務基礎上,最大限度的利用硬件環境,大大節約了相應的有效載荷。通過原理樣機,進行了相應的半實物仿真驗證試驗。 關鍵詞 空間飛行器; 復合圖像處理系統; 星敏感器; 紅外導引頭
隨著航天技術的迅速發展,近空間領域逐漸成為各大國競相進入的主戰場,本文提出了一種基于空間飛行器的單模導引頭分段調用任務技術。根據飛行任務需求,分段配置單模導引頭為定姿的星敏感器及目標探測的導引頭,該系統按照任務時序節點,嚴格分隔配置、切換復合圖像處理系統完成對應系統任務[1]。
空間飛行器的控制系統總體設計,需結合自身特殊需求,如長期在軌、任務復雜、模塊眾多和載荷有限等,設計控制系統中的圖像處理系統,其中采用自主慣性導航加星光修正的復合制導模式解決長時間在軌問題,目標探測系統采用可見光圖像匹配技術。
長時間在軌的最大問題是飛行時間過長,慣性導航誤差隨時間變大,出現誤差積累效應,必須引入外部信息修正,因此利用現有的光學導引頭將其配置成星敏感器以提供星光輔助修正,直到空間飛行器飛行到任務目標附近時,再切換成可見光目標探測導引頭,利用可見光導引頭對任務目標展開搜索和匹配,完成后續的任務。該系統即可在A時刻做可見光探測器用,也可在B時刻為星光輔助提供導航。此方案節約了大量硬件資源,提高了有效載荷比,采用控制系統進行功能分段切換,最終實現一體化、分段復用的空間飛行器圖像處理系統。
1 長時間在軌空間飛行器的復用導引頭控制系統架構設計
控制系統圖像處理系統分為如下2部分:1)探測系統:負責空間捕獲相對目標的圖像處理;2)導航系統:負責長時間在軌天文導航星光圖像處理。為實現一體化復用導引頭的技術功能,設計了控制系統總體框架,并基于該框架,設計了相應試驗原理樣機,以驗證其方案的正確性和可行性,為后續仿真驗證試驗做好硬件條件準備。基于復用導引頭原理設計的原理樣機控制系統整體架構圖見圖1,其涵蓋控制系統基本組成、功能模塊、輸出入關系和控制信息流等方面。
圖1 長時間在軌空間飛行器一體化復用導引頭控制系統的架構圖
根據該系統架構圖,明確了控制系統整體基本狀態。主要由慣導系統、探測系統、控制硬件系統和圖像處理系統等組成。針對圖像處理部分的工作模式,首先由控制系統的核心CPU板發出圖像模式的控制信號,圖像處理板接收到該信號,調用對應圖像工作模塊,完成復用導引頭工作模式切換、狀態配置、信息交互和控制脈沖輸出等工作。其中圖像板信息在星光模式下直接參與控制系統導航回路的運算,在可見光模式下參與探測系統搜索運算。關于圖像處理板的導引頭有如下配置:導引頭自檢、配置工作模式和配置對應的成像參數,啟動導引頭對應的工作狀態[2]。
為了保證完成圖像系統的高速傳輸,圖像處理板的高速圖像通訊接口方案設計選用LVDS并行傳輸的高幀頻數傳模式。控制信號通訊接口是單開一路422串口。保證圖像傳輸和控制信號通訊獨立可靠性,可以支持空間飛行器控制系統長時間在軌執行任務的單硬件多模任務。
2 半實物仿真試驗
下文設計的仿真試驗,驗證了復用導引頭對近目標和遠目標切換設計方案,以及時序分段調度控制和模式切換工作的完整性。試驗設備包括:控制計算單元、復用導引頭、目標模擬器和實時顯示控制計算機。
2.1 半實物仿真驗證復用導引頭可見光模式下的工作狀態
復用導引頭切換到可見光模式下,控制導引頭曝光時間為XX ms,利用實時顯示的方式捕獲試驗目標,通過專門設計的目標檢測、識別算法及相應的測距和測角算法,按照一定距離和一定旋轉速度讓導引頭圍繞目標進行觀測,通過422串口實時采集計算結果,繪制相關曲線,見圖2~4,最終與設定的距離和角度比對,評價復用導引頭可見光模式精度,可知圖像處理系統將復用導引頭設為目標探測模式。
圖2 相對目標距離
圖3 相對目標高低角
圖4 相對目標方位角
地面仿真系統在建立的半實物仿真驗證平臺上通過采集的實時圖像和相對目標的實時測距、測角數據,比對預定的相對距離和角度,得到的結果符合要求,表明該系統的導引頭目標捕獲探測功能正常,測距和測角結果符合總體對圖像處理系統的要求。
2.2 驗證復合導引頭星敏感器模式下工作狀態
在空曠干凈的半實物仿真試驗環境下,將復合導引頭切換到星光模式下,控制脈沖為XX ms,進行半實物仿真試驗,實時拍攝到星圖如圖5和6。

圖5 第1張原始圖像

圖6 第2張原始圖像
通過422通訊串口,將星點信息實時采集下來,捕獲到3顆星在CCD上各點位置,并繪制分布圖如圖7~9。
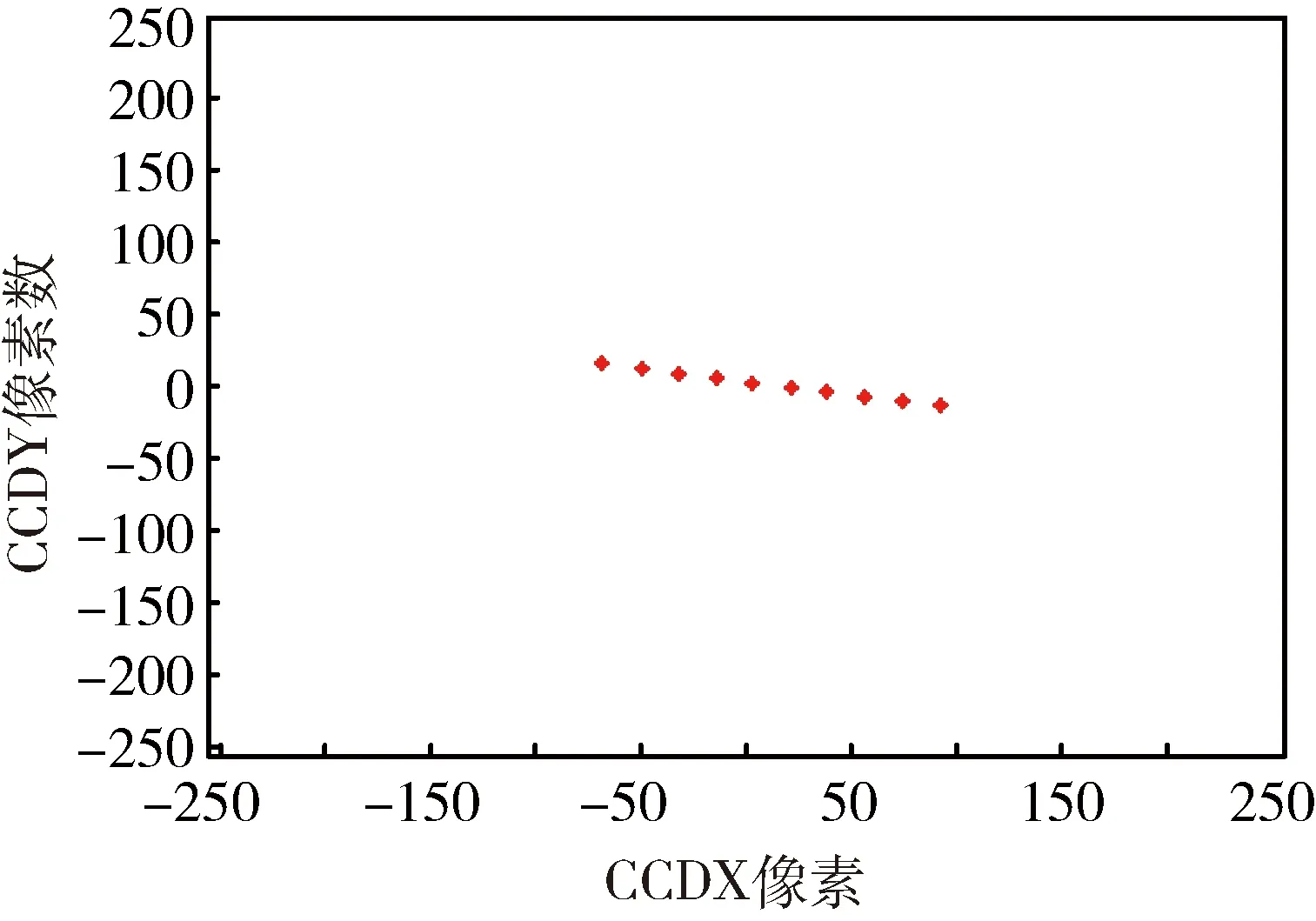
圖7 第7星點CCD位置坐標
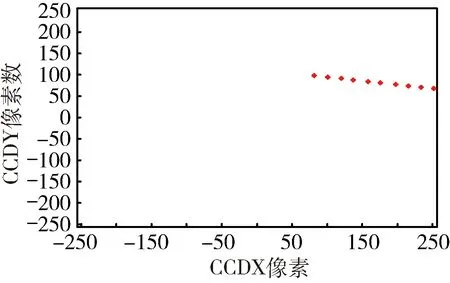
圖8 第8星點CCD位置坐標
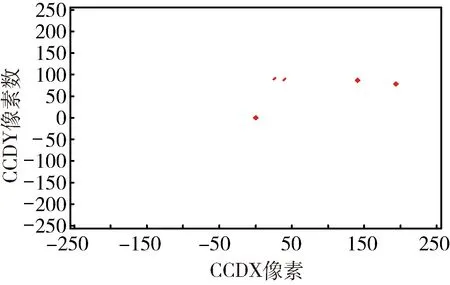
圖9 第3星點CCD位置坐標
由圖可知,切換到復用導引頭星光模式下,利用星光匹配算法提取出的3顆星的原始星圖和位置坐標圖結果符合設計要求,進一步驗證了該方法的復用導引頭切換到星敏感器狀態下的工作狀態正常,表明復用導引頭在星光模式下是可用和正確的。
3 結束語
提出了一種星光導航/可見光目標檢測導引頭復用技術,旨在不增加載荷重量和體積的前提下,通過借鑒單硬件多模分段任務的方案思路,設計了嚴格分段分隔使用工作模式,最終保證了不同工作模式下圖像處理任務的完成,并在原理樣機上進行了半實物仿真試驗,結果表明該技術在空間飛行領域中具有可行性。
[1] 程國采.彈道導彈制導方法與最優控制[M].長沙:國防科技大學出版社,1987.
[2] 黃圳圭.航天器姿態動力學[M].長沙:國防科技大學出版社,1997.
[3] 賈沛然,沈為民.彈道導彈彈道學[M].長沙:國防科技大學出版社,1981.
The Research of Starlight and Visible-Light Composited Seeker of Space Weapon
Zhang Jun1, 2
1.National Key Laboratory of Science and Technology on Aerospace Intelligence Control, Beijing 100854, China 2. Beijing Aerospace Automatic Control Institute, Beijing 100854, China
Fromthedevelopmentpointofviewofspacetechnology,therealcombatspaceweaponentersanewstage.Thetargetimageprocessingtechnologyhasbeenfocusedonthedevelopmentinrecentyears.Thispaperproposedanewtechniqueofstarlightvisible-lightcompositeimageprocesssystem.Itcombinesthestarlightsensorwiththevisible-lightseekeropticalsystemtogether,andusesthedifferentcontrolmodulestocompletetheimageprocesstask.Theadvantageofthisschemeismaximizingtheusageofhardwareresourceandreducingthepayload.Bydesigningtheengineeringprototypeandexperiments,verifiesthefeasibilityandthecorrectnessoftheapplicationofengineeringareverified.
Spaceattackanddefenseweapon;Combinationofimageprocessingsystemstar-sensor;Infraredseeker
2014-08-11
張 俊(1979-),男,安徽馬鞍山人,工程師,主要研究方向為導航、制導控制技術。
V442
A
1006-3242(2016)02-0027-04
