電液比例閥控非對稱缸系統的負載流量特性
2016-08-16 10:01:46曾樂譚建平楊俊周宇峰中南大學機電工程學院高性能復雜制造國家重點實驗室湖南長沙40083長沙航空職業技術學院航空機械制造工程學院湖南長沙4024
中南大學學報(自然科學版) 2016年7期
關鍵詞:系統
曾樂,譚建平,楊俊,周宇峰(.中南大學 機電工程學院,高性能復雜制造國家重點實驗室,湖南 長沙,40083;2.長沙航空職業技術學院 航空機械制造工程學院,湖南 長沙,4024)
電液比例閥控非對稱缸系統的負載流量特性
曾樂1,2,譚建平1,楊俊1,周宇峰1
(1.中南大學 機電工程學院,高性能復雜制造國家重點實驗室,湖南 長沙,410083;
2.長沙航空職業技術學院 航空機械制造工程學院,湖南 長沙,410124)
針對液壓缸正反方向運動特性不一致問題,建立包含死區的電液比例閥控非對稱液壓缸系統的數學模型,分析外負載變化、液壓缸結構不對稱對系統特性的影響。根據系統的數學模型得到比例閥開口處于線性區域時系統在任意負載狀態下的負載流量特性曲線。研究結果表明:隨著液壓缸兩腔面積比的減小,系統的不對稱特性增大;隨著壓力負載增加,系統的非對稱性先減弱后增強;隨著拉力負載的增加,系統的非對稱性增強;實際負載流量比與理論負載流量比相對誤差不超過6%,驗證了負載流量特性分析的正確性。
電液比例閥;非對稱特性;死區;負載流量比
電液比例系統控制精度高,價格相對伺服閥較低,且對介質污染不敏感,因而應用于工業液壓控制中[1-3]。然而,系統本身結構和外負載的不對稱特性導致電液系統在正反方向特性不一致。徐東光等[4-5]證明了閥控非對稱油缸在正反向閥開口量相等時,其正反向油缸速度比并不等于油缸面積比。正反方向的不對稱特性增加了控制器的設計難度。若系統按照速度較快的方向設計控制器,則較慢的方向就會過于遲緩;若按照速度較慢的方向上設計控制器,則在較快的方向會出現超調。對電液系統正反向速度特性的一致性研究一般從結構和控制理論兩個方面進行。在結構上提出了利用雙閥芯、非對稱閥等控制非對稱缸,但由于閥的加工復雜,且當高頻轉向運動及負載變化頻率較高時,對于消除壓力躍變和運動的不對稱性效果較差,在工業上應用不廣泛,還有待深入研究[6-7]。在控制理論方面,傳統的解決方案是基于統一模型[8-10],通過檢測系統狀態參量,采用自適應的補償技術提出很多補償方法[11-15]。雖然這些方法在理論上能有效地解決不對稱問題,但它們的共同特點是理論較復雜,參數調節較多,設計和維護難度大,對工程技術人員要求高,并且由于控制程序比較復雜,實時性差,很難在工業現場得到廣泛應用。基于系統存在不對稱特性,一種有效的方法就是在充分了解系統不對稱特性基礎上,在正、反方向上采用不同的控制器以實現正反速度特性的一致。對于比例閥,建立了其零開口的數學模型。WILSON等[16]對于死區不對稱的非零開口模型進行了研究,并分析了所建立模型的精度。但模型采用的是對稱缸,對于非對稱系統缺乏深入研究,并且未分析系統負載狀態下特性的變化。為此,本文作者通過建立電液比例閥控非對稱缸系統的數學模型,分析負載變化與結構不對稱對系統不對稱特性的影響及電液比例閥負載流量的影響,分別得到正向負載流量比和反向負載流量比。
1 系統模型的建立
1.1基本描述
文中所提的比例閥在沒有特殊說明時都指比例節流閥。電液比例閥控非對稱缸系統的原理如圖1所示,主要由存在死區的比例閥部分和非對稱液壓缸部分組成。圖1中,系統的供油的壓力為pS,回油的壓力為pR,一般為0 MPa;節流閥死區值分別為ε1S,ε1R,ε2S和ε2R,閥芯的位移為xV,L為最大的閥芯位移;比例閥信號;Q1和Q2分別為流入無桿腔和流出有桿腔的總流量,Q1S和Q2S分別為進入兩腔的流量,Q1R和Q2R分別為流出兩腔的流量,y為活塞桿的位移,p1和A1分別無桿腔的壓力和作用面積,p2和A2分別有桿腔的壓力和作用面積,F為外負載力。忽略系統的彈性負載和阻尼力。符號正負號的定義為:流入無桿腔(1腔)的流量為正,流出為負;流出有桿腔(2腔)的流量為正,流入為負。
基本定義:
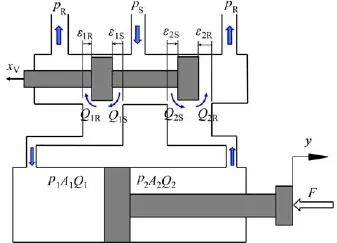
圖1 電液比例閥控非對稱缸系統原理圖Fig.1 Principle diagram of asymmetric electrohydraulic proportional system
1.2系統數學模型
1.2.1節流口數學模型
假設各個閥口的面積梯度相等,流入1腔的節流口流量模型為

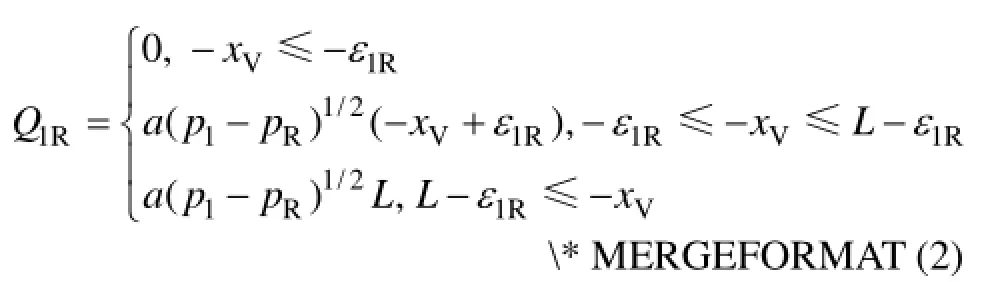
流出1腔的節流口流量模型為
設定飽和函數,,) u xLε(為

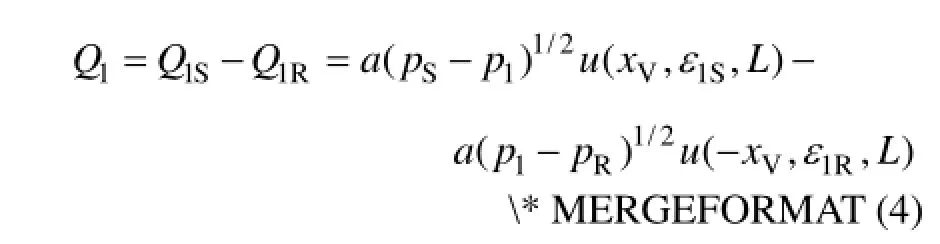
根據式(1),(2)和(3),1腔總的流量模型可以表示為
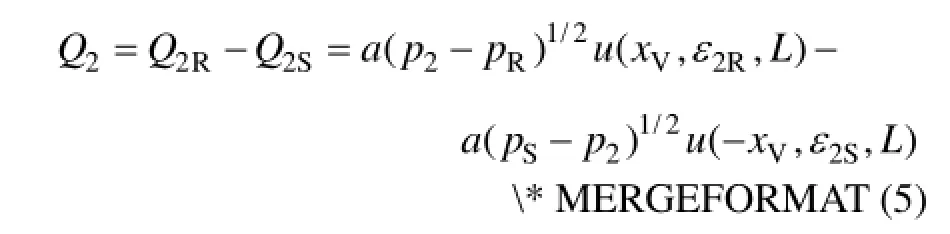
同理,2腔總的流量模型可以表示為
1.2.2液壓缸的數學模型
根據流量連續性方程,兩腔的流量可以表示為:
其中:Ci為內泄漏系數;Ce為外泄漏系數;β為油液體積模量;V10和V20分別為兩腔初始體積。由于泄漏和體積壓縮相對于位移引起的流量變化很小,故忽略泄漏和體積壓縮的影響,兩腔的流量關系可以表示為
1.2.3比例閥控非對稱缸系統模型

式(9)是所有參數的約束方程,在任意的閥芯位移或者任意的壓力下都需要保證等式(9)恒成立。
以下分2種情況進行討論。
1)對于負開口比例閥,當比例閥閥芯位于非死區部分,式(9)恒成立條件為
2)對于正開口的比例閥,當比例閥閥芯位于非死區部分時,式(9)恒成立條件為

綜合式(4),(10)和(11),當比例閥控非對稱缸閥芯位移在非死區區域時,正反向的流量表達式可以寫成統一的表達式:

由式(11)可得

k1/k2可以反映系統的非對稱特性程度。忽略油箱壓力的影響,由k1/k2可知:當負載壓力pL一定時,η越大,則系統非對稱性越強;當1≠η,pL>0時,隨著增加,系統的非對稱性先減弱后增強;當pL< 0時,隨著增加,非對稱性增強。
根據式(12)得不同負載壓力狀態的正向負載流量比、反向負載流量比:

2 比例閥控非對稱缸負載特性分析
系統空載時,負開口比例閥死區范圍內沒有流量輸出;正開口比例閥死區范圍內的流量是正反兩特性曲線疊加而成;根據式(12)得系統非死區部分空載狀態下的負載流量曲線。在空載狀態的負載流量曲線基礎上,根據式(13)得系統在不同的負載狀態下負載流量特性曲線,分別如圖2和圖3所示。設7.0=η,若當負載壓力MPa時,,;則當負載壓力時,;當負載壓力時,,。
由圖2和圖3可知:把空載當成基本狀態,當液壓缸受壓時,正向負載流量斜率減小,反向負載流量斜率增大;當液壓缸受拉時,正向負載流量斜率增大,反向負載流量斜率減小。

圖2 負開口死區負載流量特性曲線Fig.2 Load flow property curves of an overlapped valve

圖3 正開口死區負載流量特性曲線Fig.3 Load flow property curves of underlapped valve
3 實驗分析
實驗臺液壓系統原理圖如圖4所示。整體包括2部分,分別為比例閥控制的驅動系統和比例溢流閥控制的負載系統。液壓缸進出油管道都裝有壓力傳感器,檢測液壓缸兩腔壓力。驅動部分電液比例閥采用的是阿托期ATOS的DLHZO-TE-040-L71/I,閥芯為正開口;負載部分液壓缸兩腔分別采用阿托斯ATOS的RZMO-AE-30/100/I比例溢流閥,通過調節比例溢流閥溢流壓力來設定系統的負載壓力。
調節系統壓力為7 MPa,負載回路設定不同的負載壓力狀態(-1.5,0,2.0和3.0 MPa),在每個負載壓力狀態下,測試比例閥不同開口度時非對稱液壓缸活塞桿運動的速度、兩腔的壓力。由于實驗條件限制,僅對30%以內的閥口開度進行實驗。
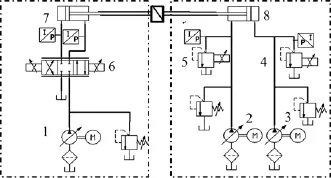
圖4 實驗系統液壓原理圖Fig.4 Hydraulic principle diagram of experimental system
比例閥在不同的負載壓力狀態下,液壓缸的負載流量隨開口度變化如圖5所示。

圖5 比例閥壓力流量特性實驗曲線Fig.5 Load flow curves of experiment
閥開口在-4%~7%范圍內,負載流量曲線斜率不穩定,流動情況比較復雜,此區域為比例閥死區部分;在超過死區很小的范圍內(-12%~-4%,7%~15%),由于閥死區非對稱(21εε≠),流量曲線的斜率緩慢變化,這種由閥死區結構非對稱引起的流量斜率變化區域稱為閥的非對稱區;死區和非對稱區負載流量變化都是非線性的。越過死區后,當開口超過死區差值3倍以上時,閥結構的非對稱影響因素可以忽略,流量曲線的斜率比較穩定,稱為閥的線性區域。負載流量的比例特性僅表現在線性區域,所以,僅在比例閥開口為-30%~-8%和8%~30%范圍內分析關于負載壓力和負載流量比值的實驗結果。
圖6所示為實驗測得的不同開口度時的負載壓力。負載壓力設置值為-1.5,0,2.0和3.0 MPa。由于液壓缸運動過程存在摩擦等影響因素,負載壓力與設定的負載有一定差值。由圖6可知:在同一設定壓力下,不同開口度時的負載壓力基本保持一致,符合實驗要求。

圖6 實驗負載壓力變化曲線Fig.6 Change curves of load pressure in experiment
根據圖6所示的負載壓力和式(13)計算理論的負載流量比,根據圖5所示實驗測得的實際負載流量計算實際負載流量比,將理論負載流量比和實際負載流量比進行比較。在不同的負載壓力狀態下,負載流量的理論比和實際比如圖7所示,理論和實際負載流量比的相對誤差如圖8所示。
分析圖8可知:在比例閥的線性區域,理論的負載流量比與實際比比較接近,最大相對誤差在6%以內,并且當開口度大于20%時,相對誤差有減小趨勢,在開口度為30%時,理論負載流量比與實際負載流量比基本相等,相對誤差在3%以內;當壓力為3.0 MPa時相對誤差比2.0 MPa時的大。由式(12)可知,由于負載壓力增大,系統的壓力和負載壓力波動、油箱的壓力對實際的負載流量影響增大,所以相對誤差增大。
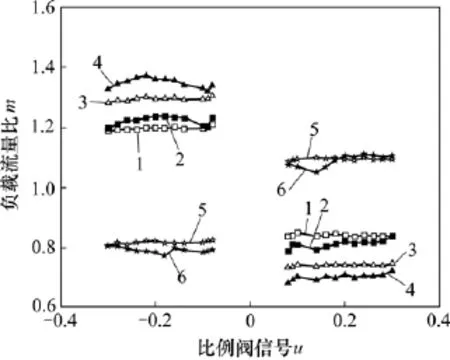
圖7 不同負載狀態的理論比和實際比對比曲線Fig.7 Contrast curves of theoretical value and actual value under variable load situation
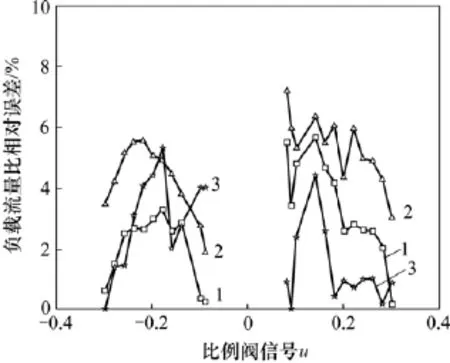
圖8 不同負載狀態的負載流量比相對誤差Fig.8 Relative error of load flow proportion value under variable load situation
4 結論
1)隨著η減小,缸的不對稱性越大,系統的不對稱特性增強。隨著壓力負載增加,系統的非對稱性先減弱后增強;隨著拉力負載增加,系統的非對稱性增強。
2)得到了不同負載狀態時正向負載流量比mi和反向負載流量比ˊ。當液壓缸受壓時,正向負載流量曲線斜率減小,反向負載流量曲線斜率增大;當液壓缸受拉時,正向負載流量曲線斜率增大,反向負載流量曲線斜率減小。負載流量比(斜率比)可以根據系統參數、η和pL準確計算。
3)在系統特性理論分析的基礎上,通過實驗,驗證了在同一η、不同負載狀態下負載流量比的正確性,為電液比例閥控非對稱缸系統非對稱控制提供了科學依據。
[1]LI K,MANNAN M A,XU M.Electro-hydraulic proportional controloftwin-cylinderhydraulicelevators[J].Control Engineering Practice,2001,9(4):367-373.
[2]VAN OIJEN N,KOMSTA J,ANTOSZKIEWICZ P.Integral slidingmodecompensatorforloadpressurecontrolof die-cushion cylinder drive[J].Control Engineering Practice, 2013,21(5):708-718.
[3]YANG Huayong,SHI Hu,GONG Guofang.Electro-hydraulic proportional control of thrust system for shield tunneling machine[J].Automation in Construction,2009,18(7):950-956.
[4]徐東光,吳盛林,趙克定.閥控非對稱缸位置伺服系統正反向速度特性的理論分析及試驗研究[J].液壓與氣動,2005(6): 35-39. XU Dongguang,WU Shenglin,ZHAO Keding.The theoretical analysis and experimental study about the position servo system of valve controlled single-rod cylinder[J].Chinese Hydraulics and Pneumatics,2005(6):35-39.
[5]李洪人,王棟梁,李春萍.非對稱缸電液伺服系統的靜態特性分析[J].機械工程學報,2003,39(2):18-22. LI Hongren,WANG Dongliang,LI Chunping.Static property analysis of electrohydraulic single rod cylinder servo systems[J]. Chinese Journal of Mechanical Engineering,2003,39(2):18-22.
[6]關景泰,王海濱,周俊龍.非對稱閥控制非對稱缸的動態特性[J].同濟大學學報(自然科學版),2001,29(9):1130-1134. GUAN Jingtai,WANG Haibing,ZHOU Junlong.Dynamic characteristic analysis of unsymmetrical cylinder controlled by unsymmetrical valve[J].Journal of Tongji University(Natural Science),2001,29(9):1130-1134.
[7]譚青,龔進,張新海.雙閥芯控制非對稱缸系統的動態特性研究[J].機械設計,2010,27(12):37-41. TAN Qing,GONG Jin,ZHANG Xinhai.Research on dynamic characteristic of dual spool controlled asymmetric cylinder[J]. Journal of Mechanic Design,2010,27(12):37-41.
[8]李洪人,關廣豐,郭洪波.考慮閥口誤差的閥控非對稱液壓缸系統建模,仿真與試驗[J].機械工程學報,2007,43(9): 33-39. LIHongren,GUANQinfeng,GUOHongbo.Modeling, simulation and experiment on valve controlled asymmetry poison considering valve port error[J].Chinese Journal of Mechanical Engineering,2007,43(9):33-39.
[9]楊軍宏,尹自強,李圣怡.閥控非對稱缸的非線性建模及其反饋線性化[J].機械工程學報,2006,42(5):203-207. YANG Junhong,YIN Ziqiang,LI Shengyi.Nonlinear modelling and feedback linearization of valve-controlled asymmetrical cylinder[J].Chinese Journal of Mechanical Engineering,2006, 42(5):203-207.
[10]呂云嵩.閥控非對稱缸頻域建模[J].機械工程學報,2007, 43(9):122-126. Lü Yunsong.Modeling in frequency domain for valve controlled asymmetrichydrauliccylinders[J].ChineseJournalof Mechanical Engineering,2007,43(9):122-126.
[11]張飛,陳建中,彭開香.液壓位置控制系統的自適應補償[J].機械工程學報,2005,41(5):94-97. ZHANG Fei,CHEN Jianzhong,PENG Kaixiang.Adaptation compensation of hydraulic servo control system[J].Chinese Journal of Mechanical Engineering,2005,41(5):94-97.
[12]王巖,張曉寧,付永領.非對稱液壓缸對稱性控制[J].北京航空航天大學學報,2007,33(11):1134-1139. WANG Yan,ZHANG Xiaoning,FU Yongling.Symmetric control of asymmetric cylinder[J].Journal of Beijing University ofAeronautics andAstronautics,2007,33(11):1134-1139.
[13]LEANDRO C,MAURO A.Adaptive cascade control of a hydraulic actuator with an adaptive dead-zone compensation and optimizationbasedonevolutionaryalgorithms[J].Expert Systems with Applications,2011,38(10):12262-12269.
[14]CHENG Guan,PAN Shuangxia.Adaptive sliding mode control ofelectro-hydraulicsystemwithnonlinearunknown parameters[J].Control EngineeringPractice,2008,16(11): 1275-1284.
[15]白寒,管成,馮培恩.電液比例系統變論域自適應模糊滑模控制[J].電機與控制學報,2009,13(5):728-733. BAIHan,GUANChen,FENGPeien.Adaptivefuzzy sliding-mode control with variable universe for electrohydraulic proportional system[J].Electric Machines and Control,2009, 13(5):728-733.
[16]WILSON B H,ERYILMAZ B.Unified modeling and analysis of a proportional valve[J].Journal of the Franklin Institute,2006, 343(1):48-68.
(編輯陳燦華)
Load flow property of electrohydraulic proportional valve controlling asymmetric cylinder system
ZENG Le1,2,TAN Jianping1,YANG Jun1,ZHOU Yufeng1
(1.State Key Laboratory of High Performance Complex Manufacturing, School of Mechanical and Electrical Engineering,Central South University,Changsha 410083,China;
2.College ofAviation Machinery and Manufacturing Engineering, ChangshaAeronautical Vocational and Technical College,Changsha 410124,China)
Aiming at the inconsistent dynamic property,the mathematic model of asymmetric electrohydraulic proportional system with dead zone was built,and the asymmetric property of the system was analysed based on the model with the influence of the load and the asymmetric structure.The load flow property curve in any load situation was obtained using the mathematic model when the proportional valve was in the linear flow zone.The results show that the asymmetric property of proportional valve is more obvious with the increase of pulling load and the decrease of the area proportion,but is less obvious at first and then more with the increase of pressure load.The relative error between the actual load flow proportion and the theoretical value is less than 6%and the analysis of the load flow property is verified correct.
electrohydraulic proportional valve;asymmetric system;dead zone;the load flow proportion
譚建平,教授,博士生導師,從事機電液集成控制理論與技術應用研究;E-mail:jptan@163.com
TH117
A
1672-7207(2016)07-2281-06
10.11817/j.issn.1672-7207.2016.07.015
2015-07-13;
2015-09-09
國家重點基礎研究發展計劃(973計劃)項目(2014CB049405);國家科技重大專項(2009ZX04005-031);高性能復雜制造國家重點實驗室自主探索基金資助項目(zzyjkt2013)(Project(2014CB049405)supported by the National Basic Research Program(973 Program) of China;Project(2009ZX04005-031)supported by the National Science and Technology Major Special;Project(zzyjkt2013)supported by the State Key Laboratory of High Performance Complex Manufacturing)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
