基于預分類的全極化HRRP模型匹配目標識別方法
2016-09-07 03:14:41吳佳妮陳永光馮德軍王雪松
系統工程與電子技術 2016年9期
吳佳妮, 陳永光, 馮德軍, 王雪松
(1. 國防科學技術大學電子信息系統復雜電磁環境效應國家重點實驗室, 湖南 長沙 410073;2. 北京跟蹤與通信技術研究所, 北京 100094)
?
基于預分類的全極化HRRP模型匹配目標識別方法
吳佳妮1, 陳永光2, 馮德軍1, 王雪松1
(1. 國防科學技術大學電子信息系統復雜電磁環境效應國家重點實驗室, 湖南 長沙 410073;2. 北京跟蹤與通信技術研究所, 北京 100094)
全極化三維散射中心模型可準確描述目標的空間幾何以及極化特征,已成為目標識別的有效手段之一。針對傳統高分辨距離像的匹配算法計算量大、耗時長的不足,提出一種基于預分類的模型匹配目標識別方法,通過目標散射機理分析,對目標進行預分類,減小匹配模型數,然后利用全極化高分辨距離像的散射中心位置與極化信息構造模型匹配函數,實現了目標類別的判定。基于電磁仿真計算數據的識別實驗表明,該方法具有良好的目標識別能力,相比于傳統方法具有更高的識別正確率以及更低的存儲量和計算量。
全極化高分辨距離像; 三維散射中心模型; 模型匹配; 目標識別
0 引 言
高分辨距離像(high resolution range profile,HRRP)目標識別的方法主要分為兩大類:模板匹配識別方法和基于特征的識別方法。模板匹配的識別方法較為直接,其將待識別距離像與模板庫中的距離像進行匹配,得到較高匹配度的模板判定為目標的類別。由于距離像敏感于目標姿態,且不同成像條件下存在較大差異,為了充分描述不同條件、不同姿態下的目標,需要建立龐大的模板庫,其給存儲和計算都造成了巨大的負擔[1-2]。基于特征的分類識別方法,則通過提取距離像中的特征,構建特征矢量,并采用模式識別的分類算法實現目標的分類。該類方法同樣需要大量的樣本數據來訓練分類器,增加了存儲和計算難度[3-4]。
近年來,在模板匹配的基礎上,采用模型匹配技術的目標識別方法受到廣泛關注。其基本思想是利用目標的三維模型來實時構造特征模板,通過與待識別數據進行比較來判定目標類型。該方法只需要存儲目標實體模型或不同姿態下的三維散射中心模型,識別時根據具體場景實時構造模板,因此具有存儲量低、處理時間快且適用于不同場景條件的優點[5]。文獻[6]基于逆合成孔徑雷達(inverse synthetic aperture radar,ISAR)序列,構造目標的三維散射中心模型,并采用模型匹配技術實現了艦船目標的識別。而文獻[7]在其研究的基礎上,將極化信息與散射中心位置信息相結合,研究了針對全極化ISAR數據的模型匹配識別方法。
針對全極化HRRP數據,本文基于模型匹配技術展開自動目標識別問題的研究。同時為提高計算效率,本文對散射中心的散射機理進行分析,以實現目標的預分類,從而減小待匹配模型數量,達到提高識別效率與正確率的目的。最后,通過仿真實驗驗證所提方法的性能。
1 全極化HRRP模型匹配
1.1目標全極化散射中心提取
在光學區,目標總的電磁散射可以認為是某些局部位置上的電磁散射的合成,這些局部的散射源通常稱為散射中心[8]。由于雷達目標的電磁散射可以由多個孤立的散射中心所表征,因此構建目標的多散射中心模型成為分析目標散射特性和進行目標識別的有效手段。
針對目標的全極化HRRP,可采用基于相干極化幾何繞射理論(coherent polarization geometrical theory of diffraction,CP-GTD)模型的散射中心估計方法提取一維距離像的散射中心。CP-GTD模型用于描述目標雷達回波,其具體形式[9]為

(1)
式中,d為目標散射中心數目;sm,pq為m散射中心q發射極化,p接收極化狀態下的復散射系數,它對應著散射矩陣的一個元素;rm為m散射中心位置坐標;αm為m散射中心類型因子。采用極化多重信號分類(polarimetric multiple signal classification,P-MUSIC)估計方法對式(1)中以上參數進行估計,即可獲得待識別目標一維距離像的散射中心,具體估計過程參考文獻[9],這里不再贅述。
1.2全極化三維模型到一維的映射
目標的全極化三維散射中心模型描述了雷達目標的空間幾何以及極化特征。利用三維散射中心模型進行識別,先將三維模型進行投影,得到對應姿態角度下的一維散射中心特征模板,然后與待識別目標一維距離像所提取的散射中心進行匹配,從而判定目標類別。三維散射中心到一維散射中心的映射可通過式(2)完成,即
Y=QRX+T
(2)
式中,X為目標三維散射中心模型的幾何矢量,記錄了各散射中心的位置;R代表目標在雷達坐標系中的旋轉,即將目標的參考的坐標系轉化為雷達坐標系,R=R1(φ)R2(θ)R3(φ)(φ為方位角;θ為俯仰角;φ為目標繞視線方向旋轉角度);Q代表目標在雷達視線方向(lineofsight,LOS)上的投影;T為平移分量,代表目標投影在視線方向上的平移;Y為映射后獲得的一維散射中心的幾何矢量。
映射過程如圖1所示。
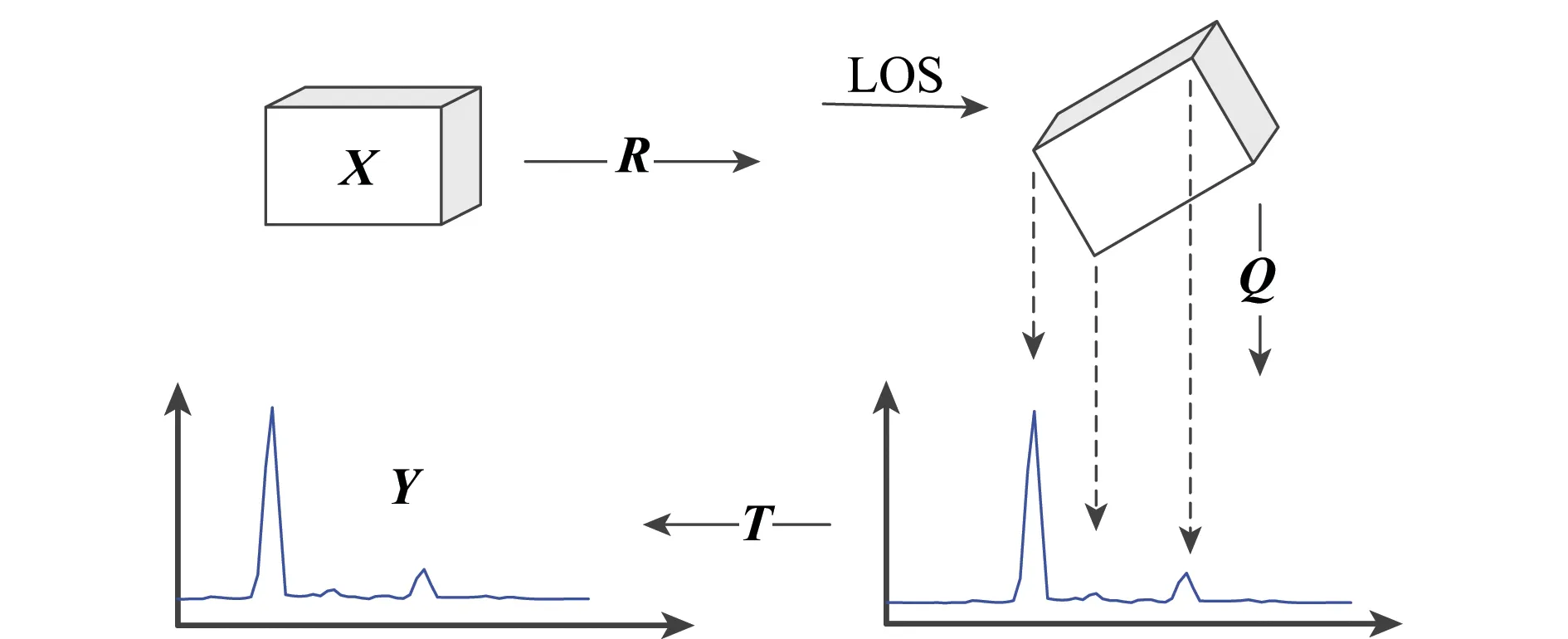
圖1 三維模型映射過程示意圖Fig.1 Diagram of mapping process for 3D model
考慮到典型目標結構在小角度范圍內變化時,散射矩陣的變化很小,可忽略不計[4],因此本文假設目標散射中心的投影映射僅影響模型中的位置信息。
1.3基于混合高斯模型的全極化模型匹配方法
待識別距離像提取的散射中心,與三維模型所映射的一維散射中心進行比較,當兩相匹配時,可判定待識別目標的類別。因此,構造合適的匹配函數,將直接影響目標識別的結果。本文基于高斯混合模型,定義衡量兩類集合匹配程度的全極化匹配函數[6]為
(3)

匹配值(matchscore,MS)計算過程中,有幾個參數值得注意。在三維模型映射時,平移分量T通過計算散射中心的質心得到
(4)
式中,xc、μc分別為待識別距離像的散射中心對應的質心以及模型映射的一維散射中心對應的質心;r為兩質心間的距離。
此外,目標旋轉角度φ、θ、φ中,由于旋轉處理后,三維散射中心將在雷達視線方向上進行投影,因此可設φ=0。而通常假定目標視線的方向已知,即θ已知。則未知量僅為目標的方位角φ,該值可通過使匹配值MS最大化求得,即

(5)
(6)
由此可見,在確定目標類別的同時,可得到目標相較于模型方位角φ的估計。
2 基于散射機理分析的目標預分類
目標模型匹配需要將HRRP提取的散射中心與目標模型在各方位角下生成的模板一一進行匹配,當待匹配模型較多時,計算量大。考慮到目標散射中心的幾何結構直接影響其極化特征,利用各散射中心的極化散射矩陣,進行散射機理分析,可得到散射中心的結構特征,用于目標識別。因此,在進行模型匹配前,對散射中心的散射機理進行分析,實現目標的預分類,可減少待匹配的模型數目。
目標極化分解能夠揭示目標的散射機理,增強對目標散射特性的理解。基于目標極化分解的分類方法由于實現簡單、物理意義明確,已被廣泛應用于目標識別。現有研究表明,將極化分解技術應用于HRRP的目標分類識別,將具有較高的分類正確率[3-4,10]。本文主要針對確定的人造目標進行分類識別,因此采用相干極化分解中的Krogager分解方法。相干極化分解的目的是將測量獲得的散射矩陣表示為幾個典型散射機制的組合[11-12],其中Krogager分解方法將對稱的散射矩陣分解為3個有具體物理意義的相干分量之和,分別為球散射、旋轉角度為φK的二面角散射和螺旋體散射,其表達式為
(7)

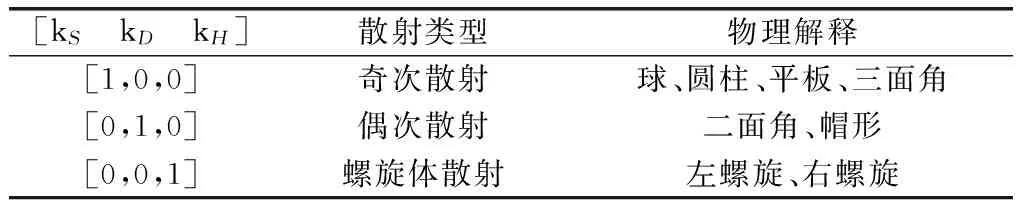
表1 Krogager特征參數與典型結構的對應關系
對三維模型的散射中心進行Krogager極化分解,可得到模型中各散射中心對應的散射機理。在三維模型映射過程中,存在散射中心位置重疊的情況。而多個二面角結構可等價于螺旋體分量[12]。因此,目標的一維距離像包含的奇次散射與偶次散射的散射中心數量應分別不大于該目標模型包含的該類散射中心的數量,且散射中心總數也應小于模型所含散射中心總數。由此,基于散射機理的預分類,以3類散射機理對應的散射中心數量作為特征矢量,根據待識別目標與模型在該特征矢量空間的分布進行判別。當模型的奇次與偶次散射機理對應的散射中心數量大于待識別目標的時,該模型為預選出的類別。如圖2所示,圖中x、y、z坐標分別為以奇次散射、偶次散射和螺旋體散射為主要散射機理的散射中心的數量,位于陰影部分的模型在預分類處理中被保留。
圖2 預分類示意圖Fig.2 Diagram of pre-classification
因一種散射機理類型可能對應多種散射結構[14],僅基于散射機理分析進行分類識別存在不確定性。在預分類確定的類別中,還需進一步采用模型匹配技術對目標進行更加準確的判別。
3 基于預分類的全極化HRRP模型匹配識別方法
基于預分類的全極化HRRP模型匹配分類識別方法,其具體步驟如圖3所示。對于待識別的目標一維距離像,首先基于P-MUSIC方法提取目標的全極化散射中心。然后采用Krogager極化分解技術,分析各散射中心的散射機理,并與模型庫中各模型對應的散射機理進行比較,排除散射機理不符的模型。隨后將模板庫中的剩余模型進行投影映射,得到一維散射中心模板,并與待識別距離像的散射中心進行匹配,最高匹配值對應的模型即為目標類別,而匹配最大值所對應的模板方位角即為目標當前的姿態角。
圖3 基于預分類的全極化HRRP模型匹配目標識別方法流程Fig.3 Target recognition process of model matching for pre-classification-based polarimetric HRRP
這一分類識別流程通過散射機理的預分類,縮小了待匹配模型的范圍,減少了計算量,提高了識別的效率。同時在模型匹配時,充分利用了目標的幾何信息以及極化信息,提高了目標正確識別率。
4 仿真分析
4.1實驗設置
假定目標由不同散射機理的多類典型結構體組成,包括三面角(trihedral,TR)、平板(plate,PL)、二面角(dihedral,DI)。名稱后緊跟數字表示目標的姿態角度,如二面角45°擺放記為DI45,30°擺放記為DI30。結構體的尺寸分為0.6m和1m兩種,用后綴表示。用以上結構體組合成6類目標,組合方式如表2所示,其中P1~P6表示6個位置的坐標,與目標的對應情況如圖4所示。

表2 6類目標的組成

圖4 目標T1的結構Fig.4 Structure of target T1
采用Feko電磁計算軟件對目標的全極化回波進行仿真,電磁計算的條件設為:頻率范圍1~1.1GHz,目標姿態角0°,對應雷達視線方向平行于x軸負向的情況,如圖4所示。仿真數據加入高斯白噪聲,信噪比(signal-to-noiseratio,SNR)定義為仿真回波信號功率與加入噪聲方差的比,由此得到不同信噪比下的目標全極化HRRP,以此作為測試樣本。應用本文提出的方法,對6類目標的仿真數據進行分類識別實驗。由于6類目標由典型結構擺放在確定位置組成,因此,模板庫中的三維散射中心模型已知,即位置矢量為各典型結構的坐標,極化矢量為各典型結構對應的散射矩陣。
本節將在驗證識別方法有效性的同時,從極化、匹配方法、信噪比等方面分析影響分類識別性能的因素。每類實驗均進行蒙特卡羅仿真100次,正確識別率定義為正確識別目標類別的次數與仿真次數的比值。
4.2結果分析
4.2.1算法的有效性以及與極化的關系
信噪比20dB時,6類目標0°姿態角時的HRRP為測試樣本。圖5給出了該條件下目標T1的HH極化通道的一維距離像,以及采用P-MUSIC方法獲得的散射中心。圖6為T1對應的三維模型經投影映射得到的一維散射中心模板。
預分類處理時,6類目標HRRP的散射機理分析結果如圖7所示。T1~T6為6類待識別目標HRRP的散射機理分析結果,M1~M6為6類目標三維模型的散射機理分析結果。
在以3種散射機理對應的散射中心數量為特征的特征空間中,6類目標分布于3個位置,T1、T2以及T3具有相同的散射機理,而T4與T5亦相同。由圖7可見,待識別目標T1經預分類處理后,判定范圍為類別1、2、3中的一類,T6則為類別1、6中一類。由此減小了待匹配模型的數量。
圖5 T1的一維距離像以及散射中心Fig.5 HRRP and scattering center of T1
圖6 T1模型映射的一維散射中心Fig.6 1D scattering center after mapping of T1
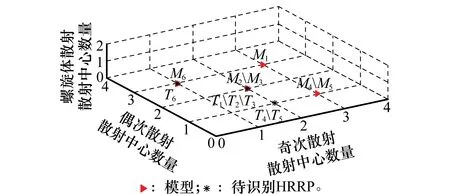
圖7 6類目標散射機理分析Fig.7 Analysis of scattering mechanism for the six categories of targets
表3列出了應用本文方法,各類目標的正確識別概率。同時為考察不同極化條件對本文識別算法性能的影響,對目標的單極化HRRP進行分類識別實驗,僅采用各目標的HH通道數據,且不進行預分類處理,實驗結果也列于表3中。

表3 本文方法識別正確率
從表3可見,針對全極化HRRP數據,應用本文提出的識別方法可得到較高的正確識別率。而在單極化條件下,正確識別率較低,主要原因是單極化數據降低了對目標散射機理的描述能力,不能全面表征目標的特性。由此可見有效利用全極化信息將有利于對目標的分類判別。
4.2.2識別性能與匹配算法的關系
目標識別的結果不僅與目標本身的特性相關,也與匹配函數的計算方法有關。本實驗在不同信噪比條件下,比較本文方法與目標識別領域常用的一種匹配方法:相關匹配法[15-16]的識別性能。相關匹配算法的主要思路為:分別計算待識別目標與待匹配模板的各極化通道散射中心幅值的相關函數,求和取最大值,其最大值對應的模板類別即為目標類別。實驗中,除匹配函數的計算方法不同外,模型映射、預處理等其他步驟不變。信噪比設為SNR=10~40dB,將6類目標正確識別率的均值作為該信噪比條件下的正確識別率。兩種方法的分類識別結果如圖8所示。
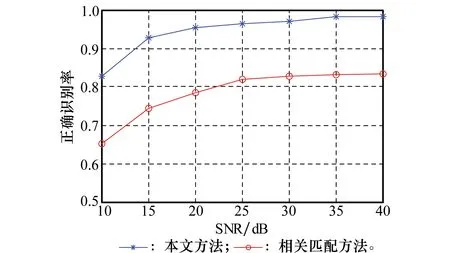
圖8 兩類匹配算法識別正確率的比較Fig.8 Comparison of the correct recognition probability between the two matching methods
由圖8可見,基于混合高斯模型的全極化匹配算法,具有較高的正確率。相對于相關匹配法,該方法利用目標極化信息的同時,還充分利用了各散射中心的位置信息,因此更適用于全極化數據的模型匹配處理。此外,實驗結果也說明了,隨著SNR的增加,目標的正確識別率增加。這是由于SNR的提高使目標檢測概率相應提高,能更準確地估計出目標的位置與極化信息,進而提高了識別的正確率。
4.2.3算法計算量分析
實驗對本文方法與HRRP傳統的模板匹配算法的計算量進行比較。考慮到識別算法中,匹配函數的計算為最主要的計算消耗,此處以兩算法計算的匹配函數次數為判定依據。以SNR=20dB,0°方位角下的HRRP為測試樣本。模板匹配算法參考文獻[2]中的設定,對6類目標在方位角0°~30°范圍內,以3°為間隔構造的一維距離像作為模板,通過計算測試樣本與模板庫中所有一維距離像模板的匹配函數,待識別目標判別為匹配函數最大的模板對應的目標類別。6類目標在兩種識別方法下,匹配函數的運算次數如圖9所示。
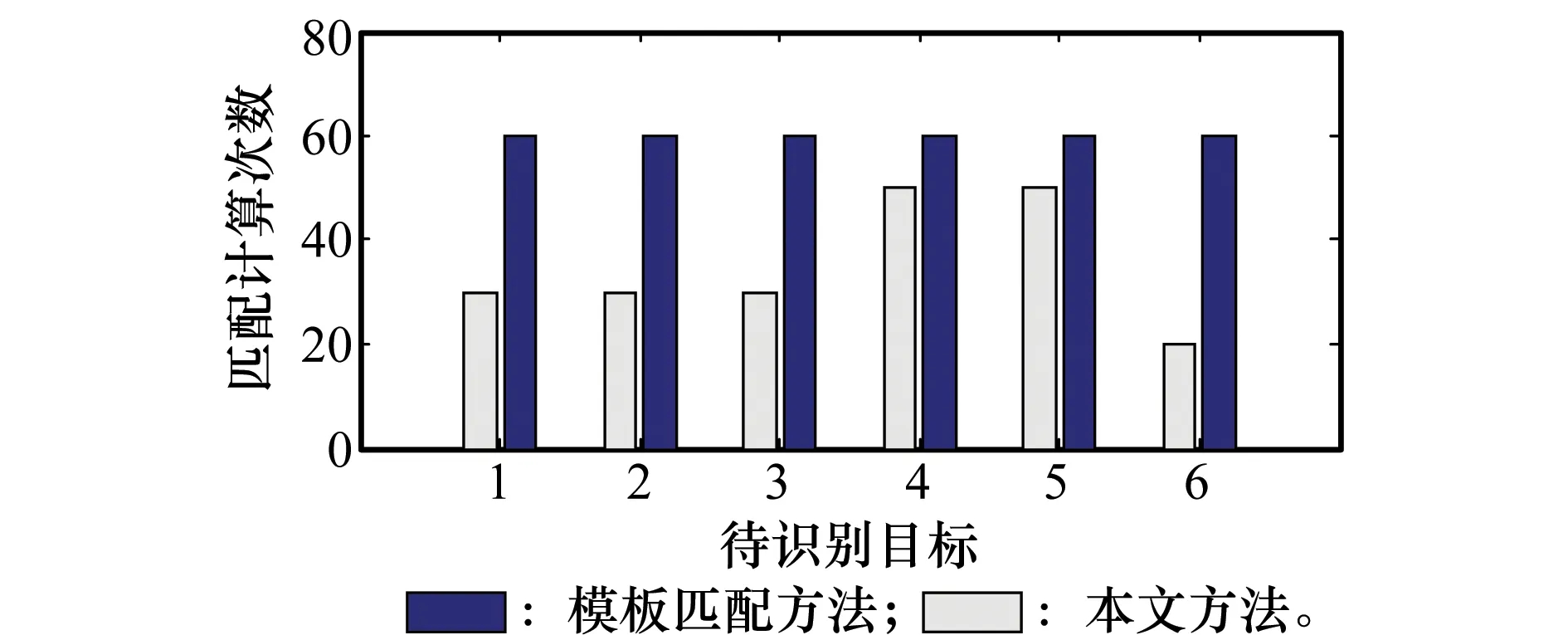
圖9 兩類方法匹配運算次數的比較Fig.9 Comparison of the number of matching operations between the two matching methods
傳統模板匹配方法識別目標時,將HRRP與模板庫中的模板一一匹配,模板庫越豐富,計算量越大。而本文方法首先通過簡單的散射機理分析,對模板進行預分類,降低待識別模板的數量,從而減少匹配次數,達到減少計算量的目的。
5 結 論
本文提出了一種針對全極化HRRP的目標識別方法,通過將基于散射機理分析的目標預分類與模型匹配相結合,充分利用了目標的幾何結構信息和極化信息來判定目標的類別,有效降低了計算量和復雜度,同時提高了目標的正確識別率。通過對幾類由典型結構組成的目標的仿真數據進行分類識別實驗,驗證了方法的有效性,表明該方法具有良好的目標識別性能。
[1]GuoZH,LiD,ZhangBY.Surveyofradartargetrecognitionusingone-dimensionalhighrangesolutionprofiles[J].Systems Engineering and Electronics, 2013, 35(1):53-59. (郭尊華, 李達, 張伯彥. 雷達高距離分辨率一維像目標識別[J].系統工程與電子技術, 2013, 35(1):53-59. )
[2]FuYW,JiaYP,ZhuangZW.Radartargetclassificationbasedononedimensionalscatteringcentersmatching[J].Acta Electronica Sinica,2006,34(3):404-408.(付耀文,賈宇平,莊釗文.基于一維散射中心匹配的雷達目標識別[J].電子學報, 2006, 34(3): 404-408.)
[3]ZhangYX,WangXD,YaoX,etal.TargetrecognitionoffullpolarimetricHRRPbasedonH/A/adecomposition[J].Systems Engineering and Electronics,2013,35(12):2502-2506.(張玉璽,王曉丹,姚旭,等.基于H_A_分解的全極化HRRP標識別方法[J].系統工程與電子技術, 2013, 35(12): 2502-2506.)
[4]GuoL.Widebandradartargetpolarimetricfeatureextractionandrecognitionmethodbasedonkernelmethod[D].Changsha:NationalUniversityofDefenseTechnology, 2009. (郭雷. 寬帶雷達目標極化特征提取與核方法識別研究[D]. 長沙: 國防科技大學, 2009.)
[5]FuQ,ZhouJX,QinJX,etal.Globalscatteringcentermodelextractinganditsapplicationinradartargetrecognition[J].Systems Engineering and Electronics, 2011, 33(1): 48-52.(付強,周劍雄,秦敬喜,等. 雷達目標散射中心模型反演及其在識別中的應用[J].系統工程與電子技術, 2011, 33(1): 48-52.)
[6]CookeT,MartorellaM,HaywoodB,etal.Useof3DshipscatterermodelsfromISARimagesequencesfortargetrecognition[J].Digital Signal Processing, 2006, 16(5): 523-532.
[7]MartorellaM,GiustiE,DemiL,etal.TargetrecognitionbymeansofpolarimetricISARimages[J].IEEE Trans. on Aerospace and Electronic Systems, 2011, 47(1): 225-237.
[8]ZhouJX.Reconstructingtheoryandmethodforthreedimensionalscatteringcenterofradartargetsinopticalregion[D].Changsha:NationalUniversityofDefenseTechnology, 2006. (周劍雄. 光學區雷達目標三維散射中心重構理論與技術[D]. 長沙: 國防科學技術大學, 2006.)
[9]DaiDH.Studyonpolarimetricradarimagingandtargetfeatureextraction[D].Changsha:NationalUniversityofDefenseTechnology, 2008. (代大海. 極化雷達成像及目標特征提取研究[D]. 長沙: 國防科學技術大學, 2008.)
[10]CloudeSR,PottierE.Areviewoftargetdecompositiontheoremsinradarpolarimetry[J].IEEE Trans. on Geoscience & Remote Sensing, 1996, 34(2):498-517.
[11]KrogagerE.Anewdecompositionoftheradartargetscatteringmatrix[J].Electronics Letters, 1990, 26(18): 1525-1526.
[12]LeeJS,PottierE. Polarimetric radar imaging:from basics to applications[M].BocaRaton:CRCPress, 2009.
[13]JacksonJA.Three-dimensionalfeaturemodelsforsyntheticapertureradarandexperimentsinfeatureextraction[D].Ohio:OhioStateUniversity,2009.
[14]XuM.Extractionandgeometricalstructureretrievalofman-madetargetinPOLSARimagery[D].Changsha:NationalUniversityofDefenseTechnology, 2008. (徐牧. 極化SAR圖像人造目標提取與幾何結構反演研究[D]. 長沙: 國防科學技術大學, 2008.)
[15]HeSH,XiaoHT,SunWF,etal.Astudyofhighrangeresolutionpolarizationradartargetrecognitionbyusingmatchedcorrelators[J].Acta Electronica Sinica, 1999, 27(3): 110-112.(何松華,肖懷鐵,孫文峰,等. 高距離分辨率極化雷達目標匹配識別研究[J].電子學報, 1999, 27(3): 110-112. )
[16]ZhuYS,GuoCM.Theresearchofcorrelationmatchingalgorithmbasedcorrelationcoefficient[J].Signal Processing, 2003, 19(6): 531-534.(朱永松,國澄明. 基于相關系數的相關匹配算法研究[J].信號處理, 2003, 19(6): 531-534.)
Target recognition for polarimetric HRRP based on pre-classification and model matching
WU Jia-ni1, CHEN Yong-guang2, FENG De-jun1, WANG Xue-song1
(1.StateKeyLaboratoryofComplexElectromagneticEnvironmentEffectsonElectronicsandInformationSystem,NationalUniversityofDefenseTechnology,Changsha410073,China; 2.BeijingInInstituteofTrackingandTelecommunicationsTechnology,Beijing100094,China)
Owing to the ability of accurately modeling geometric and polarimetric scattering feature of a target, polarimetric three-dimensional scattering center model has been prevailing as one of the effective approaches for target recognition. With the objective of solving the high computational complexity and longtime consumption caused by the traditional matching method in polarimetric high resolution range profile (HRRP), a novel recognition method for polarimetric HRRP based on model matching and pre-classification approaches is proposed. Firstly, the proposed method classifies the radar targets based on the scattering mechanism to reduce the number of matching models. Then, the geometric and polarimetric information of the scattering center extracted from polarimetric HRRP is used to create the match indicator. Finally, the targets are recognized by employing the match indicator. Experimental results based on electromagnetic data demonstrate that the proposed method outperforms the traditional matching method in terms of recognition accuracy, storage consumption and computational cost.
polarimetric high resolution range profile (HRRP); three-dimensional scattering center model; model matching; target recognition
2015-10-25;
2016-03-09;網絡優先出版日期:2016-06-07。
國家自然科學基金(61302143,61490693,41301490);國家高技術研究發展計劃(863計劃)(2013AA122202)資助課題
TN 95
A
10.3969/j.issn.1001-506X.2016.09.01
吳佳妮(1988-),女,博士研究生,主要研究方向為極化信息處理、雷達目標分辨與識別技術。
E-mail:tuotuonini@163.com
陳永光(1962-),男,教授,博士,主要研究方向為雷達信號處理、目標識別。
E-mail:ygchen@netease.com
馮德軍(1972-),男,副研究員,博士,主要研究方向為雷達信號處理、雷達電子戰。
E-mail:fengdejun@nudt.edu.cn
王雪松(1972-),男,教授,博士,主要研究方向為極化信息處理、雷達目標識別、新體制雷達技術。
E-mail:wangxuesong@nudt.edu.cn
網絡優先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160607.1605.016.html
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34