面向移動(dòng)時(shí)空軌跡數(shù)據(jù)的頻繁閉合模式挖掘*
2016-09-13 00:55:16郭鑫穎秦學(xué)斌
西安科技大學(xué)學(xué)報(bào) 2016年4期
關(guān)鍵詞:實(shí)驗(yàn)
王 亮,汪 梅,郭鑫穎,秦學(xué)斌
(西安科技大學(xué) 電氣與控制工程學(xué)院,陜西 西安 710054)
?
面向移動(dòng)時(shí)空軌跡數(shù)據(jù)的頻繁閉合模式挖掘*
王亮,汪梅,郭鑫穎,秦學(xué)斌
(西安科技大學(xué) 電氣與控制工程學(xué)院,陜西 西安 710054)
移動(dòng)泛在感知設(shè)備的廣泛普及為移動(dòng)軌跡數(shù)據(jù)的大規(guī)模采集、存儲(chǔ)與分析開(kāi)拓了廣闊的空間。通過(guò)對(duì)用戶的移動(dòng)軌跡數(shù)據(jù)進(jìn)行分析挖掘,發(fā)現(xiàn)其中所蘊(yùn)含的有價(jià)值的行為模式與特征,對(duì)于基于位置的服務(wù)(Location-based Service,LBS),城市交通管理,精準(zhǔn)廣告營(yíng)銷等領(lǐng)域均具有重要的價(jià)值。文中針對(duì)移動(dòng)軌跡頻繁模式規(guī)模過(guò)大、信息冗余問(wèn)題定義了頻繁閉合移動(dòng)軌跡模式,以經(jīng)典閉合序列模式挖掘算法為基礎(chǔ)提出了適應(yīng)于移動(dòng)軌跡數(shù)據(jù)的頻繁閉合模式CloseTraj算法,分別通過(guò)對(duì)仿真數(shù)據(jù)與真實(shí)數(shù)據(jù)的實(shí)驗(yàn)測(cè)試,結(jié)果顯示文中所提出的CloseTraj算法對(duì)于頻繁閉合移動(dòng)軌跡模式挖掘問(wèn)題具有較強(qiáng)的適用性,同時(shí)在運(yùn)行效率方面具有顯著優(yōu)勢(shì)。
移動(dòng)軌跡;數(shù)據(jù)挖掘;頻繁閉合模式
0 引 言
隨著移動(dòng)通信與定位技術(shù)的不斷發(fā)展,通過(guò)攜帶便攜式設(shè)備對(duì)移動(dòng)軌跡數(shù)據(jù)進(jìn)行采集、傳輸與存儲(chǔ)成為可能。利用數(shù)據(jù)挖掘、機(jī)器學(xué)習(xí)等相關(guān)技術(shù)對(duì)所收集的移動(dòng)軌跡數(shù)據(jù)進(jìn)行挖掘與分析,進(jìn)而從中發(fā)現(xiàn)有價(jià)值的信息與知識(shí),對(duì)于理解移動(dòng)行為模式、揭示移動(dòng)行為規(guī)律、預(yù)測(cè)移動(dòng)行為趨勢(shì)均具有十分重要的價(jià)值與意義。此外,在應(yīng)用方面,所發(fā)現(xiàn)的價(jià)值信息可以為基于位置的服務(wù)、城市公共管理、移動(dòng)社交網(wǎng)絡(luò)、精準(zhǔn)廣告營(yíng)銷等領(lǐng)域提供決策依據(jù)。
然而,移動(dòng)軌跡數(shù)據(jù)由于其中所蘊(yùn)含的時(shí)間-空間交叉演化關(guān)系以及背景知識(shí)約束(城市路網(wǎng),區(qū)域功能定位等方面),同時(shí)移動(dòng)軌跡背后所隱含的是移動(dòng)者的行為特征,也即“人的特征”,這種“以人為中心”的場(chǎng)景對(duì)于行為特征的提取與行為模式的挖掘分析帶來(lái)了極大的挑戰(zhàn)。作為時(shí)間連續(xù)的行為序列數(shù)據(jù),頻繁模式集中易出現(xiàn)多個(gè)挖掘模式多項(xiàng)集重合、冗余的現(xiàn)象,而現(xiàn)實(shí)社會(huì)中同一社區(qū)群組相近移動(dòng)行為特征的普遍存在更是在一定程度上凸顯了這一問(wèn)題,為此,文中定義了面向移動(dòng)軌跡的頻繁閉合模式,在序列數(shù)據(jù)頻繁閉合模式挖掘的經(jīng)典算法的基礎(chǔ)上,提出了適應(yīng)于移動(dòng)軌跡數(shù)據(jù)的頻繁閉合模式挖掘算法CloseTraj算法,在對(duì)移動(dòng)軌跡數(shù)據(jù)進(jìn)行模式挖掘時(shí)最大程度的縮減所挖掘的模式規(guī)模,從而使行為模式挖掘過(guò)程所產(chǎn)生的模式集合在包含相同信息的前提下,規(guī)模得到最大程度的約簡(jiǎn)。
與文中相關(guān)的研究工作主要有以下2類:①頻繁閉合模式;②移動(dòng)軌跡模式挖掘。在頻繁閉合模式挖掘方面,針對(duì)項(xiàng)目集數(shù)據(jù),Pasquier等于1999年首次提出了頻繁閉合項(xiàng)集挖掘問(wèn)題[1]。 Pei等利用壓縮頻繁模式樹FP-Tree結(jié)構(gòu),提出了CLOSET算法以挖掘頻繁閉合項(xiàng)集。Zaki與Hsiao等提出了CHARM算法以挖掘頻繁閉合模式[2]。針對(duì)序列數(shù)據(jù)的模式挖掘問(wèn)題,Yan等提出了CloSpan算法以挖掘頻繁閉合序列模式,CloSpan算法利用剪枝策略與非頻繁序列剔除策略,通過(guò)對(duì)投影數(shù)據(jù)庫(kù)的搜索,將所挖掘的頻繁閉合序列模式存儲(chǔ)在晶格結(jié)構(gòu)中[3]。Han等學(xué)者提出了兩方向搜索投影數(shù)據(jù)庫(kù)的BIDE算法以有效提升閉合模式挖掘的效率[4]。
在移動(dòng)軌跡模式挖掘方面,F(xiàn).Giannotti等學(xué)者在文獻(xiàn)中定義了一種稱之為T-Patterns的帶時(shí)間注釋的移動(dòng)軌跡序列模式。同時(shí)其提出了熱點(diǎn)空間區(qū)域ROI(Region of Interesting)以表示移動(dòng)對(duì)象頻繁訪問(wèn)的一類空間區(qū)域。通過(guò)分別以靜態(tài)和動(dòng)態(tài)的方式檢測(cè)發(fā)現(xiàn)熱點(diǎn)空間區(qū)域,利用類PrefixSpan 算法對(duì)頻繁時(shí)間注釋移動(dòng)軌跡模式進(jìn)行抽取與挖掘[5]。臺(tái)灣地區(qū)Anthony J.T.Lee 等學(xué)者在中提出了一種基于圖的頻繁時(shí)空軌跡模式挖掘算法GBM。通過(guò)構(gòu)建Mapping 圖和軌跡信息List,GBM 算法以深度優(yōu)先搜索策略對(duì)Mapping圖進(jìn)行遍歷搜索以發(fā)現(xiàn)頻繁軌跡模式集合[6]。然而,GBM 算法中所使用的移動(dòng)軌跡數(shù)據(jù)集合是一種簡(jiǎn)單的離散相鄰單元序列數(shù)據(jù),因而無(wú)需對(duì)連續(xù)空間域進(jìn)行離散化劃分或是近似處理。新墨西哥州立大學(xué)的曹惠萍等學(xué)者提出了以移動(dòng)軌跡分段簡(jiǎn)化方法解決頻繁時(shí)空序列模式挖掘問(wèn)題[7]。在文獻(xiàn)[7]中,原始移動(dòng)軌跡被轉(zhuǎn)換為分割線段表示的序列數(shù)據(jù)集合,進(jìn)而以基于距離的方法提取頻繁軌跡線段,以及采用改進(jìn)的類Apriori算法與substring tree的結(jié)構(gòu)進(jìn)行頻繁模式挖掘。Chung等學(xué)者在文獻(xiàn)[8]中使用基于Apriori的挖掘算法以發(fā)現(xiàn)移動(dòng)軌跡序列數(shù)據(jù)中的頻繁移動(dòng)模式。Arthur.A.Shaw等在中基于Apriori算法對(duì)以二維空間坐標(biāo)表示的移動(dòng)軌跡數(shù)據(jù)的頻繁模式進(jìn)行了挖掘分析研究[9]。
1 時(shí)空移動(dòng)軌跡頻繁模式
移動(dòng)軌跡數(shù)據(jù)可以表示為如下所示的四元組形式:
對(duì)于移動(dòng)軌跡數(shù)據(jù)頻繁模式的定義為移動(dòng)軌跡頻繁模式具有如下形式:
且其支持度大于預(yù)先給定的最小支持度閾值。頻繁移動(dòng)模式反映的是移動(dòng)用戶群體在移動(dòng)行為上具有相同的特征或是規(guī)律,其表征的是移動(dòng)用戶在上一時(shí)刻位于
假設(shè)通過(guò)移動(dòng)模式的挖掘之后,產(chǎn)生了2個(gè)不同的移動(dòng)模式,分別為模式(1)
2 閉合頻繁移動(dòng)軌跡模式挖掘
基于Pasquier等于1999年所提出的頻繁閉合項(xiàng)目集的概念,定義了頻繁閉合移動(dòng)軌跡模式。
定義3:頻繁移動(dòng)模式Tpi屬于頻繁閉合移動(dòng)模式,其必須滿足如下條件,即在頻繁移動(dòng)模式集合中不存在這樣的一個(gè)模式Tpj,使Tpj與Tpi具有相同的支持度值,且Tpj為Tpi的超集。即在所獲取的頻繁移動(dòng)軌跡模式集中,不存在任一模式Tpj,滿足Tpj?Tpi,且support(Tpj)≥support(Tpj)。
與頻繁閉合項(xiàng)目集的性質(zhì)相似,頻繁閉合移動(dòng)軌跡模式集合僅僅是頻繁移動(dòng)軌跡模式集的一個(gè)有限子集,但其包含了所有頻繁項(xiàng)目集的完整信息。根據(jù)頻繁閉合移動(dòng)軌跡模式集可以產(chǎn)生頻繁移動(dòng)軌跡模式全集,然而在數(shù)量上頻繁閉合移動(dòng)軌跡模式集合較頻繁移動(dòng)軌跡模式集有了顯著的減少,有效減緩了挖掘過(guò)程的運(yùn)算代價(jià)。
文中以頻繁閉合序列模式挖掘經(jīng)典算法CloSpan為基礎(chǔ),以FP-Tree表示模式支持度,通過(guò)對(duì)移動(dòng)數(shù)據(jù)庫(kù)的深度優(yōu)先搜索以挖掘頻繁閉合移動(dòng)軌跡模式,設(shè)計(jì)并實(shí)現(xiàn)了適應(yīng)于移動(dòng)軌跡數(shù)據(jù)的頻繁閉合移動(dòng)軌跡模式挖掘算法CloseTraj算法,CloseTraj算法的偽代碼如下所示:
算法:頻繁閉合移動(dòng)軌跡模式挖掘算法CloseTraj輸入:移動(dòng)軌跡數(shù)據(jù)庫(kù)D;用戶自定義最小支持度閾值σ,用戶設(shè)定的空間區(qū)域范圍大小ε;輸出:頻繁閉合移動(dòng)軌跡模式集合S1.基于空間聚類的移動(dòng)軌跡數(shù)據(jù)轉(zhuǎn)化f(x,y,ε);2.計(jì)算聚類空間集合中的元素頻繁度并移除非頻繁聚類空間項(xiàng);3.以長(zhǎng)度為1的頻繁聚類空間集合構(gòu)建晶格結(jié)構(gòu)LS;4.對(duì)于每一個(gè)晶格集合LS中的元素ls5.搜索以ls為前綴的投影數(shù)據(jù)庫(kù)Dls,同時(shí)擴(kuò)展生成新的頻繁模式;6.剔除非閉合頻繁移動(dòng)軌跡模式;7.更新頻繁模式晶格結(jié)構(gòu)LS.
如圖1所示為頻繁閉合模式挖掘的基本流程:首先對(duì)GPS移動(dòng)軌跡數(shù)據(jù)進(jìn)行數(shù)據(jù)的預(yù)處理過(guò)程,包括針對(duì)冗余數(shù)據(jù)的基于速度比較的合并約簡(jiǎn)、缺失數(shù)據(jù)的線性插值以及噪聲數(shù)據(jù)的卡爾曼濾波剔除等,經(jīng)過(guò)數(shù)據(jù)清洗過(guò)程之后生成分段語(yǔ)義軌跡數(shù)據(jù)集合,進(jìn)而對(duì)所覆蓋的空間區(qū)域進(jìn)行近鄰聚類操作以實(shí)現(xiàn)對(duì)連續(xù)空間區(qū)域的離散化處理過(guò)程,最后實(shí)現(xiàn)對(duì)閉合頻繁模式的挖掘過(guò)程。需要注意的是,在空間區(qū)域聚類部分,基于空間語(yǔ)義近鄰函數(shù)以及移動(dòng)軌跡數(shù)據(jù)的空間分布點(diǎn)密度進(jìn)行連續(xù)空間區(qū)域的聚類處理,定義空間語(yǔ)義近鄰函數(shù)為f(x,y,ε),其中x和y表示空間坐標(biāo)軸的橫坐標(biāo)與縱坐標(biāo),也即經(jīng)緯度信息,ε為用戶設(shè)定的空間區(qū)域范圍大小,該參數(shù)的大小表征語(yǔ)義軌跡中空間粒度的粗細(xì)程度。

圖1 移動(dòng)軌跡數(shù)據(jù)頻繁閉合模式挖掘流程Fig.1 Closed pattern mining process of mobile trajectory data
3 實(shí)驗(yàn)分析
實(shí)驗(yàn)運(yùn)行環(huán)境的CPU為Intel(R)Core(TM)i3-311M @2.40 GHz,內(nèi)存為4.00 GB,操作系統(tǒng)為Win7,所有的實(shí)驗(yàn)采用C++實(shí)現(xiàn)。實(shí)驗(yàn)數(shù)據(jù)分別采用仿真數(shù)據(jù)與真實(shí)數(shù)據(jù),其中仿真數(shù)據(jù)為隨機(jī)移動(dòng)軌跡數(shù)據(jù)與自定義頻繁移動(dòng)軌跡數(shù)據(jù)的合成數(shù)據(jù)集,其中隨機(jī)軌跡數(shù)據(jù)的產(chǎn)生如下:假設(shè)移動(dòng)個(gè)體初始隨機(jī)定位于某一空間位置,其次以某一隨機(jī)概率向其近鄰的若干個(gè)網(wǎng)格遷移或是繼續(xù)停留在當(dāng)前所處的移動(dòng)網(wǎng)格單元之內(nèi),軌跡的長(zhǎng)度服從Poisson 分布規(guī)律,軌跡平均長(zhǎng)度從12到20不等,數(shù)據(jù)規(guī)模為12 M,相應(yīng)的實(shí)驗(yàn)結(jié)果如圖2~圖4所示。真實(shí)數(shù)據(jù)為雅典某學(xué)校校車GPS軌跡數(shù)據(jù),數(shù)據(jù)集規(guī)模為352 M,相應(yīng)的實(shí)驗(yàn)結(jié)果如圖5所示。
對(duì)上述算法進(jìn)行仿真數(shù)據(jù)測(cè)試試驗(yàn),第一個(gè)實(shí)驗(yàn)為移動(dòng)軌跡數(shù)據(jù)的空間聚類實(shí)驗(yàn),即基于空間近鄰函數(shù)關(guān)系的連續(xù)空間離散化聚類,ε參數(shù)在隨機(jī)數(shù)據(jù)集與真實(shí)GPS數(shù)據(jù)集中的值分別設(shè)置為2個(gè)單位與125 m,最終的聚類結(jié)果如圖2所示為64個(gè)互不重合的空間區(qū)域,圖示為64個(gè)離散空間區(qū)域之間基于移動(dòng)軌跡數(shù)據(jù)的關(guān)聯(lián)矩陣可視化結(jié)果,所獲取的關(guān)聯(lián)矩陣中元素mi,j表示實(shí)驗(yàn)數(shù)據(jù)中從離散區(qū)域i到j(luò)的軌跡個(gè)數(shù)。第二個(gè)實(shí)驗(yàn)為ColseTray算法的效率測(cè)試,即不同最小支持度閾值下算法的運(yùn)行時(shí)間測(cè)試。第三個(gè)實(shí)驗(yàn)為ColseTray算法的擴(kuò)展性測(cè)試,具體為平均軌跡長(zhǎng)度下算法的運(yùn)行時(shí)間測(cè)試。
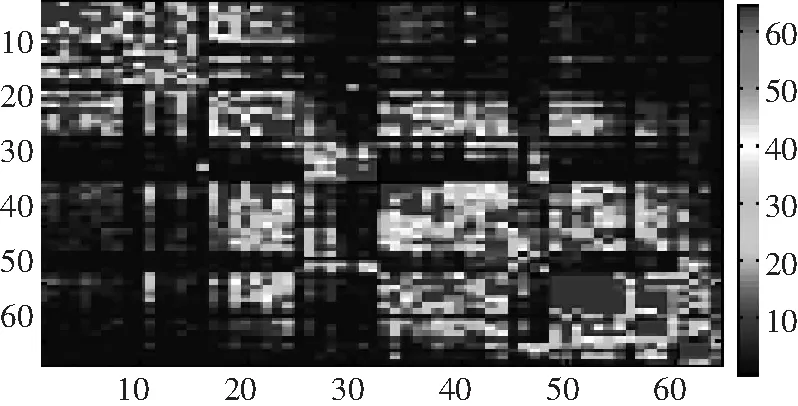
圖2 移動(dòng)軌跡空間近鄰聚類結(jié)果圖示Fig.2 Neighbor clustering result of mobile trajectory spatial
圖3所示為分別基于不同的搜索方式:深度優(yōu)先搜索與廣度優(yōu)先搜索實(shí)現(xiàn)的頻繁閉合移動(dòng)軌跡模式挖掘效率實(shí)驗(yàn),深度優(yōu)先搜索算法為CloseTraj算法,其中最小支持度分別為0.5%到1%之間均勻取值,從圖中可以看出,隨著支持度的不斷增大,2種算法的時(shí)間消耗呈指數(shù)規(guī)律遞減,同時(shí)與廣度優(yōu)先搜索相比較,采用深度優(yōu)先搜索方式的CloseTraj算法其運(yùn)行時(shí)間更短。
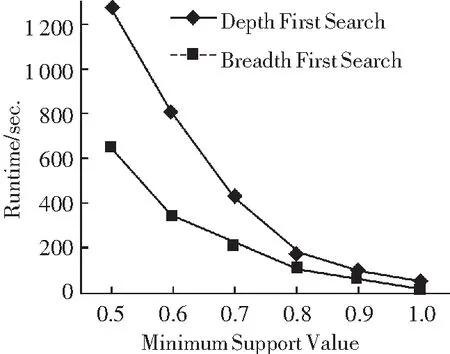
圖3 2種不同搜索方式下的算法運(yùn)行時(shí)間Fig.3 Algorithm running time of two different search methods
圖4 所示為不同移動(dòng)軌跡平均長(zhǎng)度在最小支持度分別為0.5%,0.6%以及0.7%下的算法運(yùn)行時(shí)間結(jié)果圖示。由圖可以看出,隨著移動(dòng)軌跡平均長(zhǎng)度的不斷增加,其算法運(yùn)行時(shí)間呈線性增長(zhǎng)趨勢(shì);且相同平均長(zhǎng)度的移動(dòng)軌跡在最小支持度越小的條件下其運(yùn)行時(shí)間越長(zhǎng),增長(zhǎng)越快。
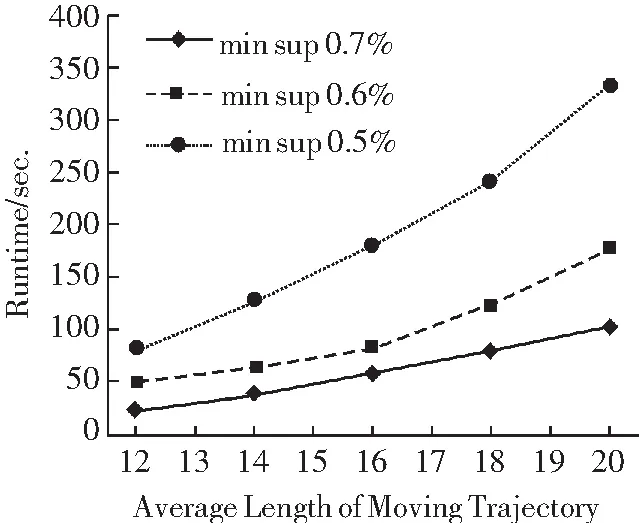
圖4 不同平均移動(dòng)軌跡長(zhǎng)度下的算法運(yùn)行效率Fig.4 Algorithm running efficiency of different average length mobile trajectories
此外,利用CloseTraj算法對(duì)雅典市真實(shí)車輛GPS移動(dòng)軌跡數(shù)據(jù)進(jìn)行了閉合頻繁移動(dòng)模式挖掘?qū)嶒?yàn)測(cè)試,如圖5所示為所挖掘的閉合頻繁模式集合中的一個(gè)模式Google Earth可視化結(jié)果,圖中紅色的氣泡圖標(biāo)表示的是所在的空間位置,由圖中可見(jiàn),該閉合模式長(zhǎng)度為3,方向從下向上移動(dòng)。

圖5 頻繁閉合移動(dòng)軌跡模式的Google Earth圖示Fig.5 Google Earth picture of frequent closed mobile trajectory patterns
4 結(jié) 論
文中針對(duì)移動(dòng)軌跡數(shù)據(jù)的頻繁閉合模式挖掘問(wèn)題展開(kāi)研究,利用深度優(yōu)先搜索方式,基于經(jīng)典序列數(shù)據(jù)的頻繁閉合模式挖掘算法提出了適用于上述問(wèn)題的CloseTraj算法,分別進(jìn)行了基于仿真數(shù)據(jù)與真實(shí)數(shù)據(jù)的算法運(yùn)行實(shí)驗(yàn)。在算法運(yùn)行效率方面,實(shí)驗(yàn)結(jié)果顯示隨著支持度的不斷增大,算法運(yùn)行時(shí)間呈指數(shù)規(guī)律遞減;在時(shí)間可擴(kuò)展性方面,隨著移動(dòng)軌跡平均長(zhǎng)度的增加,算法運(yùn)行時(shí)間呈線性增長(zhǎng)趨勢(shì),即所提出的算法在效率性及可擴(kuò)展性方面均具有較好的性能。
References
[1]Pasquier N,Bastide Y,Taouil R,et al.Discovering frequent closed itemsets for association rules[C]//Database Theory-ICDT’99.Springer Berlin Heidelberg,1999:398-416.
[2]Zaki M J,Hsiao C J.CHARM:An efficient algorithm for closed itemset mining[C]//SDM,2002(2):457-473.
[3]Yan X,Han J,Afshar R.CloSpan:Mining closed sequential patterns in large datasets[C]//In SDM,2003:166-177.
[4]Wang J,Han J.BIDE:Efficient mining of frequent closed sequences[C]//Data Engineering,2004.Proceedings.20th International Conference on.IEEE,2004.
[5]Fosca Giannotti,M.Nanni,F(xiàn).Pinelli,D.Pedreschi,Trajectory pattern mining[C]//In:Proceedings of the ACM SIGKDD International Conference on Knowledge Discovery and Data Mining,Scan Jose,California,USA,2007.
[6]Anthony J T Lee,Yi-An Chen,Weng-Chong IP.Mining frequent trajectory patterns in spatial-temporal database[J].Information Sciences,2009,179(13):2 218-2 231.
[7]Huiping Cao,Nikos Mamoulis,David W.Cheung,Mining frequent spatio-temporal sequential patterns[C]//In:Proceedings of the Fifth IEEE International Conference on Data Mining,ICDM,2005.
[8]Jae Du Chung,Oh Hyun Paek,Jun Wook Lee,et al.Temporal pattern mining of moving objects for location-based service[C]//In:Proceedings of the 13th International Conference on Database and Expert Systems Applications,331-340.
[9]Arthur A Shaw,Gopalan N P.Frequent pattern mining of trajectory coordinates using apriori Algorithm[J].International Journal of Computer Application,2011,22(9):1-7.
Frequent closed patterns mining for mobile trajectory data
WANG Liang,WANG Mei,Guo Xin-ying,QIN Xue-bin
(CollegeofElectricalandControlEngineering,Xi’anUniversityofScienceandTechnology,Xi’an710054,China)
Thankstothewidespreadpopularityofmobileubiquitoussensingdevices,theacquisition,storageandanalysisoflarge-scalemobiletrajectorydatahavebroadprospectsfortechnologyapplications.Bythemeansofanalysisandminingforusers’mobiletrajectoryhistory,wediscovermeaningfulbehaviorpatternsandcharacteristicsbehindtherecordedtrajectories.Theabove-mentioneddiscoveredknowledgeisofgreatvalueforlocation-basedservices,urbantrafficmanagement,targetadvertisingandmanyotherareas.Inthispaper,aimedattheover-sizedissueandinformationredundancyprobleminfrequentmovementtrajectorypatterns,aconceptionoffrequentclosemovingtrajectorypatternisproposed.Moreover,basedonclassicalclosedsequentialpatternminingalgorithm,afrequentclosepatternapproach,namelyCloseTrajalgorithm,isdevisedundertheconditionofmovingtrajectorydata.Basedonthesimulationandrealdataset,thecorrespondingresultsshowthatourproposedCloseTrajalgorithmhasstrongadaptabilitytotheaforementionedproblemwithsignificantadvantagesintermsofoperationalefficiency.
mobiletrajectory;datamining;frequentclosedpattern
10.13800/j.cnki.xakjdxxb.2016.0419
1672-9315(2016)04-0573-04
2016-04-20責(zé)任編輯:劉潔
國(guó)家自然科學(xué)基金(61402360)
王亮(1984-),男,陜西寶雞人,博士,E-mail:liangwang0123@gmail.com
TP 311
A
猜你喜歡
作文·小學(xué)低年級(jí)(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂(lè)作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(jí)(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(jí)(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(bào)(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
 西安科技大學(xué)學(xué)報(bào)2016年4期
西安科技大學(xué)學(xué)報(bào)2016年4期
- 西安科技大學(xué)學(xué)報(bào)的其它文章
- 高校學(xué)報(bào)評(píng)審專家數(shù)據(jù)庫(kù)管理系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)*
- 比較視野下的高校學(xué)報(bào)分析研究
——以《西安科技大學(xué)學(xué)報(bào)》(2008—2013年數(shù)據(jù))為例* - 煤炭供應(yīng)鏈牛鞭效應(yīng)量化研究*
- 勞動(dòng)力轉(zhuǎn)移對(duì)農(nóng)戶煤炭消費(fèi)量的影響研究*
——陜西農(nóng)村的實(shí)證調(diào)查 - 單軸壓縮荷載下紅砂巖不同張開(kāi)度 三維通透裂隙擴(kuò)展機(jī)理研究*
- 干濕循環(huán)作用下膨脹土開(kāi)裂和收縮特性試驗(yàn)研究*